Диференціальний індуктивний датчик зусиль

Формула / Реферат
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центру на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані з входом диференціального підсилювача через суматор, який відрізняється тим, що датчик забезпечено додатковими двома парами магнітопроводів з котушками, розташованими у взаємно перпендикулярних площинах з основними парами магнітопроводів з котушками симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центру на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому додаткові магнітопроводи з котушками, розміщені на одних осях, через підсилювально-перетворювальні канали зв'язані з входом додаткового диференціального підсилювача через додатковий суматор.
Текст
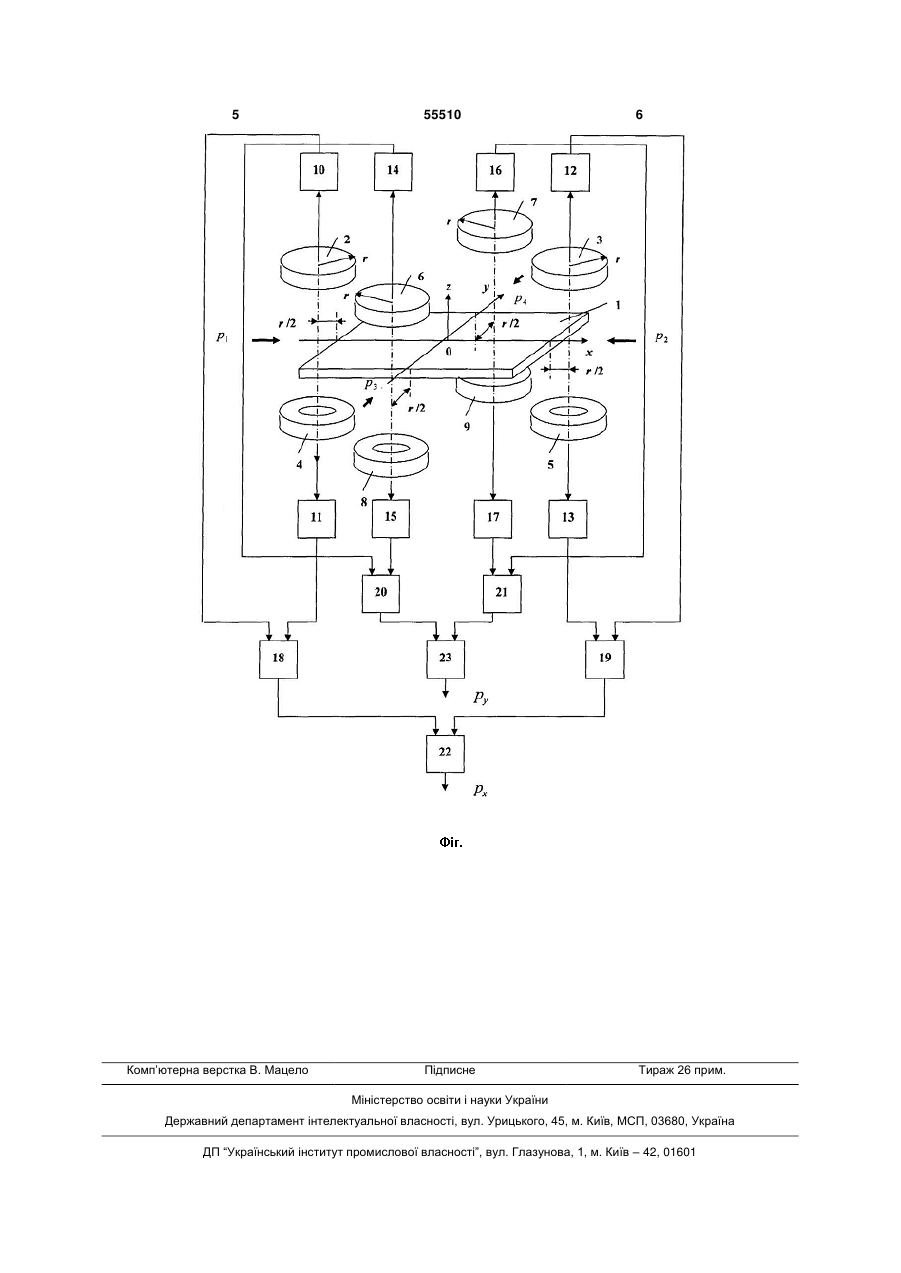
Диференціальний індуктивний датчик зусиль, що містить дві пари магнітопроводів з котушками, розташованих симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центру на відстань, що дорівнює половині радіуса магнітопроводу з котушкою, причому магнітопроводи з котушками, розміщені на одних осях, через підси 3 55510 4 Суть корисної моделі пояснюється кресленp1. У цьому випадку на виходах обмоток кожного з ням, де зображено диференціальний індуктивний магнітопроводів з котушками 2-5 з'являються оддатчик зусиль, що містить прохідний якір 1, першу накові за величиною прирости сигналів, а резуль2, 3, другу 4, 5, третю 6, 7 та четверту 8, 9 пари тівний сигнал рх на виході диференціального підмагнітопроводів з котушками, розташованих симесилювача 22 буде дорівнювати почетвереному трично з чотирьох боків прохідного якоря 1 на значенню приросту кожного з магнітопроводів з осях, зміщених відносно торців прохідного якоря 1 котушками 2-5. При цьому на виході диференціау напрямку від його центра на відстань, що дорівльного підсилювача 23 результівний сигнал ру=0. нює половині радіуса r/2 магнітопроводів з котушУ випадку, коли р2-р1= 0 та р4-р3 0 прохідний ками 2-9, обмотки магнітопроводів з котушками 2, якір 1 зміщується вздовж осі у та магнітопроводів з 4 та 3, 5 відповідно з'єднані з підсилювальнокотушками 2-9 на відстань, пропорційну р4-р3. На перетворювальними каналами 10, 11 та 12, 13, виходах обмоток кожного з магнітопроводів з кообмотки магнітопроводів з котушками 6, 7 та 8, 9 тушками 6-9 з'являються однакові за величиною відповідно з'єднані з підсилювальноприрости сигналів, а результівний сигнал ру на перетворювальними каналами 14, 15 та 16, 17, виході диференціального підсилювача 23 буде суматори 18-21 та диференціальні підсилювачі 22, дорівнювати почетвереному значенню приросту 23. кожного з магнітопроводів з котушками 6-9. При Диференціальний індуктивний датчик зусиль цьому на виході диференціального підсилювача працює наступним чином. При різниці сил, діючих 22 результівний сигнал рх=0. у протилежних напрямках на прохідний якір 1, що У випадку, коли р2-р1 0 та р4-р3 0 прохідний дорівнює р2-p1=0 та р4-р3=0 перша 2, 3, друга 4, 5, якір 1 зміщується вздовж осей х та у та магнітоптретя 6, 7 та четверта 8, 9 пари магнітопроводів з роводів з котушками 2-9 на відстань, пропорційну котушками розташовані симетрично відносно р2-р1 та р4-р3 відповідно. На виходах обмоток кожцентра 0 прохідного якоря 1 та у середині піддіаного з магнітопроводів з котушками 2-9 з'являютьпазонiв лінійності характеристик перетворення ся прирости сигналів, результівний сигнал рх на кожного з магнітопроводів з котушками 2-9. При виході диференціального підсилювача 22 буде цьому на виходах обмоток усіх магнітопроводів з дорівнювати почетвереному значенню приросту котушками 2-9 будуть однакові по величині сигнакожного з магнітопроводів з котушками 2-5, а рели, а на виході диференціальних підсилювачів 22, зультівний сигнал ру на виході суматора 23 - поче23 відповідно результівні сигнали рх, ру дорівнюватвереному значенню приросту кожного з магнітоптимуть нулю. роводів з котушками. У випадку, коли р2-р1 0 та р4-р3=0 прохідний якір 1 зміщується вздовж осі х та магнітопроводів з котушками 2-9 на відстань, пропорційну різниці p2 5 Комп’ютерна верстка В. Мацело 55510 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDifferential inductive force cell
Автори англійськоюSmyrnyi Mykhailo Fedorovych
Назва патенту російськоюДифференциальный индуктивный датчик усилий
Автори російськоюСмирный Михаил Федорович
МПК / Мітки
МПК: G01L 9/00
Мітки: датчик, індуктивний, диференціальний, зусиль
Код посилання
<a href="https://ua.patents.su/3-55510-diferencialnijj-induktivnijj-datchik-zusil.html" target="_blank" rel="follow" title="База патентів України">Диференціальний індуктивний датчик зусиль</a>
Диференціальний індуктивний датчик зусиль
Номер патенту: 50564
Опубліковано: 10.06.2010
Автор: Смірний Михайло Федорович
Мітки: індуктивний, зусиль, диференціальний, датчик
Формула / Реферат:
Диференціальний індуктивний датчик зусиль, що містить першу пару магнітопроводів з котушками, розміщену по один бік прохідного якоря у зонах його протилежних торців, який відрізняється тим, що у датчику розташовано другу пару магнітопроводів з котушками симетрично відносно прохідного якоря з протилежного боку на осях, зміщених від торців прохідного якоря у напрямку від його центра на відстань, що дорівнює половині радіуса магнітопроводу з...
Диференційний індуктивний датчик тиску
Номер патенту: 59947
Опубліковано: 15.09.2003
Автори: Смірний Михайло Федорович, Дядичев Валерій Володимирович
Мітки: індуктивний, диференційний, тиску, датчик
Формула / Реферат:
Диференційний індуктивний датчик тиску, що містить одну пару магнітопроводів з котушками, розміщених по один бік плоского прохідного якоря в зонах його протилежних торців, який відрізняється тим, що датчик забезпечений другою парою магнітопроводів з котушками, встановленими з протилежного боку прохідного якоря, симетрично першій парі магнітопроводів з котушками, на осях, зміщених щодо торців прохідного якоря в напрямку від його центра на...
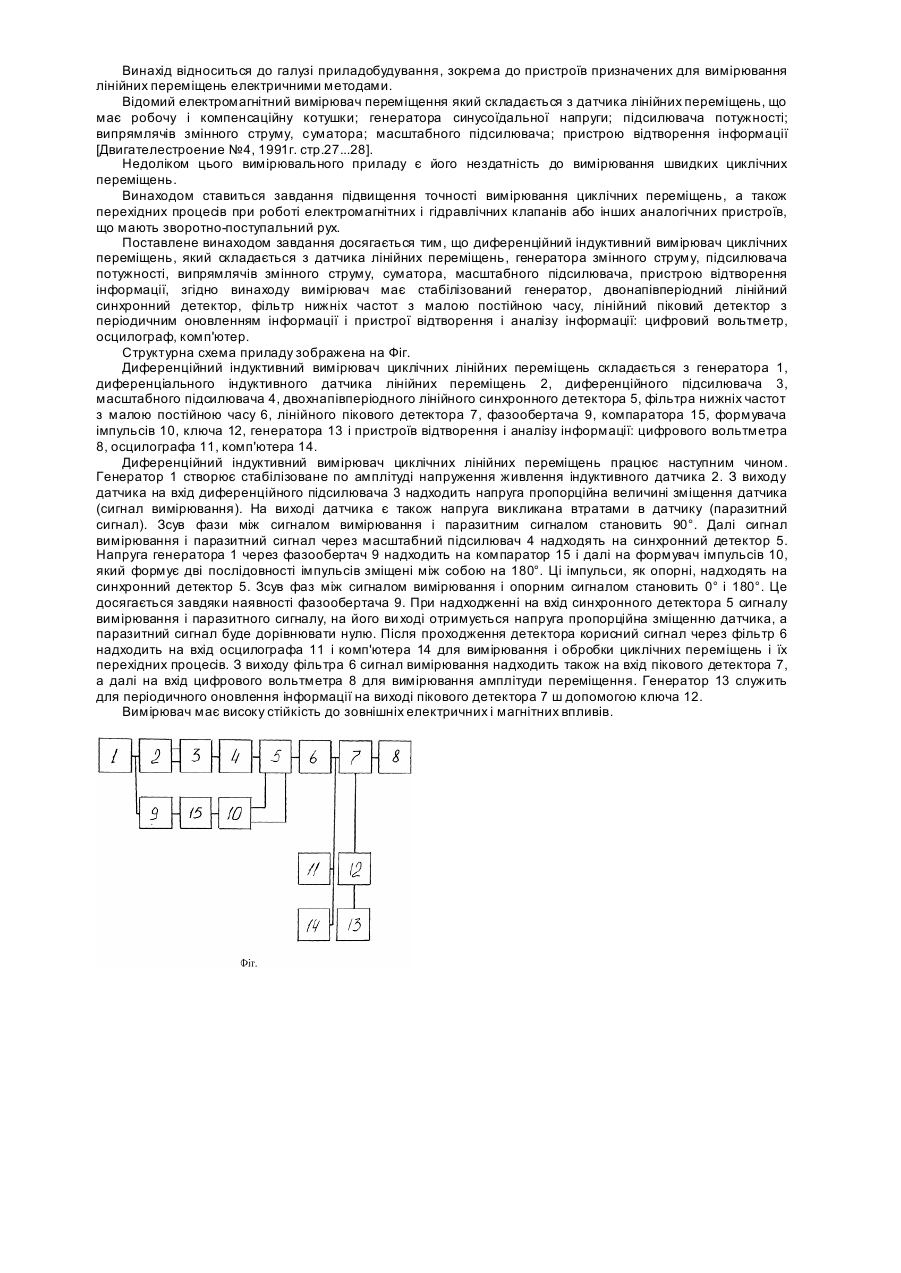
Диференціальний індуктивний вимірювач циклічних лінійних переміщень
Номер патенту: 79143
Опубліковано: 25.05.2007
Автори: Мягков Валерій Іванович, Герасимчук Юрій Анатолійович, Топчій Сергій Іванович, Філіппов Анатолій Захарович
Мітки: індуктивний, циклічних, диференціальний, лінійних, вимірювач, переміщень
Формула / Реферат:
Диференціальний індуктивний вимірювач циклічних лінійних переміщень, який відрізняється тим, що містить послідовно з’єднані стабілізований генератор, диференціальний індуктивний датчик лінійних переміщень, диференціальний підсилювач, масштабний підсилювач, двонапівперіодний лінійний синхронний детектор, фільтр нижніх частот з малою постійною часу, лінійний піковий детектор і цифровий вольтметр, при цьому до генератора підключені послідовно...
Диференційний індуктивний датчик переміщень
Номер патенту: 4143
Опубліковано: 27.12.1994
Автор: Нікітін Борис Михайлович
МПК: G01B 7/00
Мітки: датчик, переміщень, диференційний, індуктивний
Формула / Реферат:
Дифференциальный индуктивный датчик перемещений, содержащий якорь, охватывающий его сердечник и измерительный элемент, отличающийся тем, что, с целью повышения точности, якорь выполнен в виде прямоугольного диэлектрического бруса, разделенного по диагонали прямоугольным магнитопроводом, измерительный элемент выполнен в виде двух одинаковых одно-слойных индукторных катушек, размещенных в каркасах, каркасы установлены на противолежащих...
Індуктивний датчик поверхневих нерівностей пиломатеріалів
Номер патенту: 46256
Опубліковано: 10.12.2009
Автори: Степанчук Сергій Петрович, Пилипчук Марія Іванівна
МПК: G01B 7/28, B27B 13/00
Мітки: нерівностей, індуктивний, поверхневих, датчик, пиломатеріалів
Формула / Реферат:
Індуктивний датчик поверхневих нерівностей пиломатеріалів, що має котушку індуктивності та осердя, генератор змінної напруги, електричний опір, два діоди і конденсатор, який відрізняється тим, що осердя датчика встановлене на якорі, який виконаний у вигляді маятника на осі в корпусі датчика та має щуп у вигляді двох паралельно розташованих тонких сегментів, що притискаються до поверхні вимірювання за допомогою пружини.
Попередній патент: Спосіб настроювання приладів вихрострумового контролю
Наступний патент: Пристрій для переливання і дозування рідини
Випадковий патент: Блок для обробки рідкого металу газами