Спосіб випробувань ракети, керованої в лазерному промені
Номер патенту: 63755
Опубліковано: 15.01.2004
Автори: Косовенко Євген Вікторович, Доценко Борис Іванович, Корольов Анатолій Миколайович, Семенов Леонід Антонович, Егліт Микола Олександрович, Коростельов Олег Петрович, Яковенко Петро Олексійович, Кузьмін В'ячеслав Павлович, Смішко Григорій Павлович

Формула / Реферат
Спосіб випробування ракети, що включає формування опорної траєкторії ракети у вигляді нерухомої лінії наведення, вироблення керуючої команди пропорційної відхиленню ракети від центра лазерного променя, наведення ракети з використанням керуючої команди, передачу і прийом телеметричної інформації про відхилення ракети від центру лазерного променя, оцінку лінійної неузгодженості між ракетою і опорною траєкторією наведення, який відрізняється тим, що фіксують фактичне положення центра лазерного променя і його поточне відхилення від лінії прицілювання, визначають поточну лінійну неузгодженість між ракетою й опорною траєкторією наведення шляхом порівняння телеметричних даних про поточне відхилення ракети від центру лазерного променя і фактичного положення центру лазерного променя відносно лінії наведення і з врахуванням цього оцінюють якість стабілізації ракети в інформаційному полі керування.
Текст
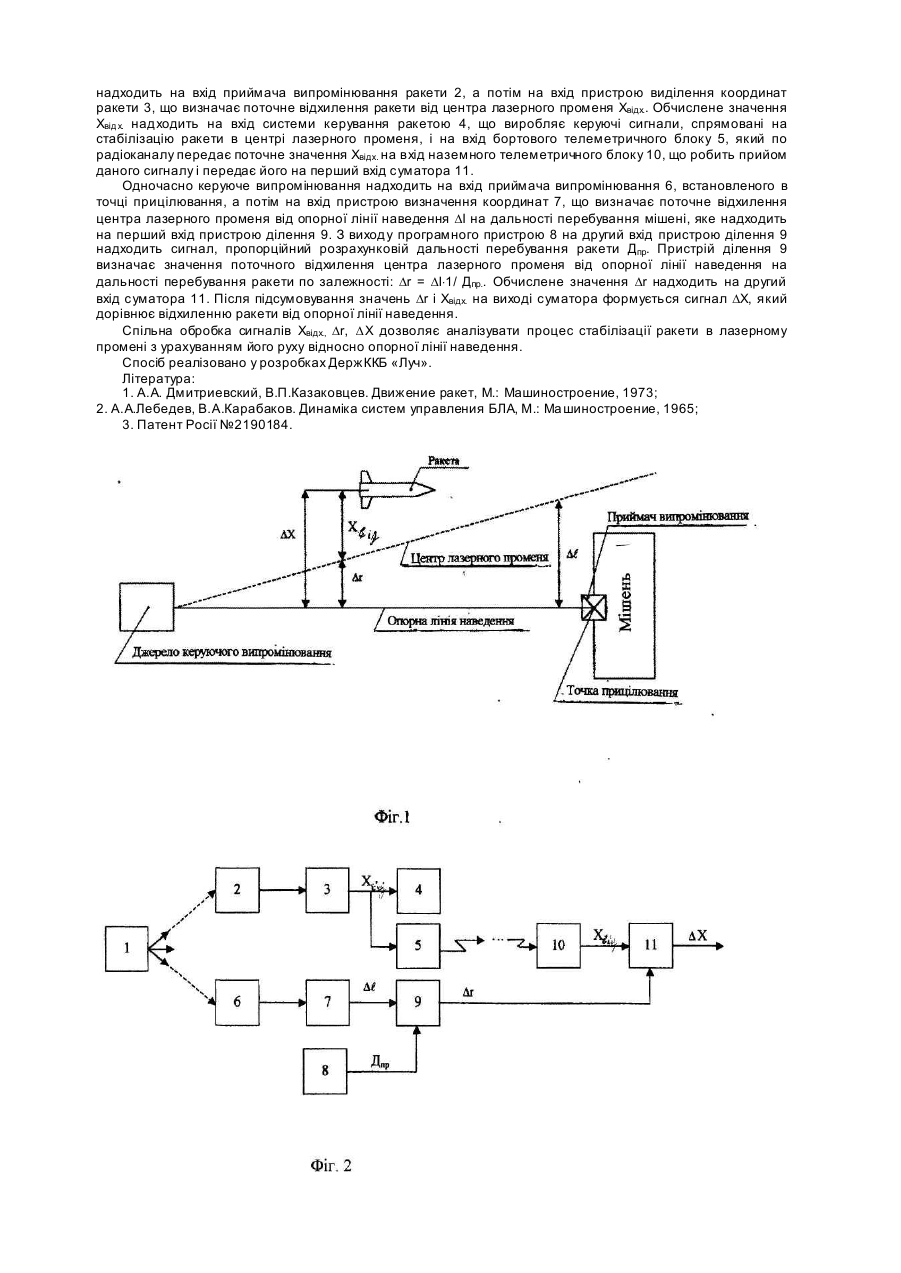
Винахід відноситься до ракетної техніки і може бути використаний в комплексах озброєння, до складу яких входять ракети, керовані по лазерному променю. Технічний результат – підвищення об'єктивності результатів випробувань, зниження витрат на проведення випробувань. Відомий спосіб випробувань ракети, що включає формування команди керування по визначеному закону, політ ракети відповідно до заданої команди керування, передачу телеметричних даних з борту ракети на наземні вимірювальні засоби, їх обробку разом з результатами зовнішньотраєкторних вимірювань та оцінку якості функціонування за визначеними параметрами ([1], стор. 267-272, стор. 407416). Недоліками даного способу є: – невисока достовірність результатів випробувань через недостатню точність зовнішньотраєкторних вимірювань; – висока вартість і велика складність проведення випробувань через використання комплексу зовнішньотраєкторних вимірювань. Відомий спосіб випробувань телекерованої ракети, що включає вимірювання координат цілі і ракети, формування опорної траєкторії наведення ракети, вимірювання лінійної неузгодженості між ракетою й опорною траєкторією наведення, формування команди керування ракетою, пропорційної лінійній неузгодженості між ракетою й опорною траєкторією наведення і наведення ракети на ціль ([2], стор. 327329). При його використанні не оцінюються динамічні характеристики ракети, якість перехідних процесів при відпрацьовуванні команди керування, фактичне поточне неузгодженість між опорною траєкторією і ракетою. За прототип прийнятий спосіб випробування телекерованої ракети [3], що включає формування опорної траєкторії ракети у виді нерухомої лінії наведення, вироблення керуючої команди, пропорційної лінійній неузгодженості між ракетою й опорною траєкторією наведення, наведення ракети з використанням керуючої команди і оцінку якості процесу керування по нормальному перевантаженню ракети, що обчислюється по визначеному алгоритму і передається по телеметричному каналу на наземний реєструючий комплекс. У розглянутих ви ще способах передбачається, що центральний промінь інформаційного поля керування збігається з опорною траєкторією наведення. Фактично через погрішності апаратури керування в автоматичних системах наведення, помилкових дій оператора в напівавтоматичних системах наведення поточне положення центра інформаційного поля не збігається з опорною траєкторією. У результаті чого виникає лінійна неузгодженість між опорною траєкторією і центром поля керування (наприклад, має місце відхилення рівносигнальної зони чи центра лазерного променя від опорної траєкторії). При цьому виникаюче додаткове відхилення складається з відхиленням ракети від центра керування і сприймається як фактичне відхилення ракети від заданої траєкторії. При значних погрішностях слідкуючих систем наведення унаслідок дії флуктуаційних перешкод, помилкових дій оператора об'єктивність результатів випробувань значно знижується, а дії оператора не контролюються. Задачею даного винаходу є підвищення об'єктивності і точності відпрацьовування результатів випробувань ракет і їхніх систем керування, зниження витрат на проведення випробувань. Поставлена мета досягається тим, що в способі випробувань ракети, що включає формування опорної траєкторії ракети у виді нерухомої лінії наведення, вироблення керуючої команди, пропорційної відхиленню ракети від центра лазерного променя, наведення ракети з використанням керуючої команди, передачу і прийом телеметричної інформації про відхилення ракети від центра лазерного променя і опорної траєкторії наведення, фіксують фактичне положення центра лазерного променя і його поточне відхилення від нерухомої лінії наведення, визначають поточну лінійну неузгодженість між ракетою та опорною траєкторією наведення шляхом порівняння телеметричних даних про поточне відхилення ракети від центра лазерного променя і даних приймача лазерного випромінювання про поточне відхилення лазерного променя від нерухомої лінії наведення і оцінюють якість стабілізації ракети в інформаційному полі керування. Введення у відомий спосіб нових операцій, що дозволяють у сумарному поточному відхиленні ракети від опорної траєкторії виділити складові погрішності наземної апаратури наведення, включаючи оператора, і динамічні помилки ракети при відпрацьовуванні керуючих впливів, дозволяє підвищити об'єктивність результатів аналізу випробувань ракети і комплексу озброєння в цілому. На фіг.1 показана схема, що ілюструє даний спосіб випробування ракети, де Хвід х.– відхилення ракети від центра лазерного променя; Dr – відхилення центра лазерного променя від опорної лінії наведення в точці перебування ракети; DI – відхилення центра лазерного променя від опорної лінії наведення в точці перебування мішені; DХ – відхилення ракети від опорної лінії наведення. На фіг.2 показана структурна схема пристрою, що підтверджує можливість технічної реалізації даного способу випробувань. До складу пристрою входить джерело керуючого лазерного випромінювання 1, приймач випромінювання ракети 2 і приймач випромінювання 6. Вихід приймача випромінювання ракети 2 зв'язаний із входом пристрою виділення координат ракети відносно центра лазерного променя 3, вихід якого зв'язаний із входом системи керування ракети 4 і входом бортового телеметричного блоку 5, вихід якого по радіоканалу зв'язаний із входом наземного телеметричного блоку 10, вихід якого зв'язаний з першим входом суматора 11. Вихід приймача випромінювання 6 зв'язаний із входом пристрою визначення положення центра лазерного променя відносно опорної лінії наведення 7, вихід якого зв'язаний з першим входом пристрою ділення 9, другий вхід якого зв'язаний з виходом програмного пристрою 8, вихід пристрою ділення 9 зв'язаний із другим входом суматора 11, на виході якого формується вихідне значення, що дозволяє визначити відхилення ракети від опорної лінії наведення. Схема працює таким чином. Лазерний промінь, формований джерелом керуючого випромінювання 1, надходить на вхід приймача випромінювання ракети 2, а потім на вхід пристрою виділення координат ракети 3, що визначає поточне відхилення ракети від центра лазерного променя Хвідх.. Обчислене значення Хвід х. надходить на вхід системи керування ракетою 4, що виробляє керуючі сигнали, спрямовані на стабілізацію ракети в центрі лазерного променя, і на вхід бортового телеметричного блоку 5, який по радіоканалу передає поточне значення Хвідх. на вхід наземного телеметричного блоку 10, що робить прийом даного сигналу і передає його на перший вхід суматора 11. Одночасно керуюче випромінювання надходить на вхід приймача випромінювання 6, встановленого в точці прицілювання, а потім на вхід пристрою визначення координат 7, що визначає поточне відхилення центра лазерного променя від опорної лінії наведення DI на дальності перебування мішені, яке надходить на перший вхід пристрою ділення 9. З виходу програмного пристрою 8 на другий вхід пристрою ділення 9 надходить сигнал, пропорційний розрахунковій дальності перебування ракети Дпр. Пристрій ділення 9 визначає значення поточного відхилення центра лазерного променя від опорної лінії наведення на дальності перебування ракети по залежності: Dr = DI×1/ Дпр.. Обчислене значення Dr надходить на другий вхід суматора 11. Після підсумовування значень Dr і Хвідх. на виході суматора формується сигнал DХ, який дорівнює відхиленню ракети від опорної лінії наведення. Спільна обробка сигналів Хвідх., Dr, DХ дозволяє аналізувати процес стабілізації ракети в лазерному промені з урахуванням його руху відносно опорної лінії наведення. Спосіб реалізовано у розробках ДержККБ «Луч». Література: 1. А.А. Дмитриевский, В.П.Казаковцев. Движение ракет, М.: Машиностроение, 1973; 2. А.А.Лебедев, В.А.Карабаков. Динаміка систем управления БЛА, М.: Ма шиностроение, 1965; 3. Патент Росії №2190184.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for testing the rocket controlled in laser ray
Автори англійськоюSemenov Leonid Antonovych, Yakovenko Petro Oleksiiovych, Korosteliov Oleh Petrovych, Dotsenko Borys Ivanovych, Kuzmin Viacheslav Pavlovych, Kosovenko Yevhen Viktorovych, Ehlit Mykola Oleksandrovych, Koroliov Anatolii Mykhailovych, Smishko Hryhorii Pavlovych
Назва патенту російськоюСпособ испытаний ракеты, управляемой в лазерном луче
Автори російськоюСеменов Леонид Антонович, Яковенко Петр Алексеевич, Коростелев Олег Петрович, Доценко Борис Иванович, Кузьмин Вячеслав Павлович, Косовенко Евгений Викторович, Эглит Николай Александрович, Королев Анатолий Николаевич, Смишко Григорий Павлович
МПК / Мітки
МПК: F42B 15/01
Мітки: промені, випробувань, ракети, лазерному, спосіб, керованої
Код посилання
<a href="https://ua.patents.su/2-63755-sposib-viprobuvan-raketi-kerovano-v-lazernomu-promeni.html" target="_blank" rel="follow" title="База патентів України">Спосіб випробувань ракети, керованої в лазерному промені</a>
Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети
Номер патенту: 49095
Опубліковано: 16.09.2002
Автори: Коростельов Олег Петрович, Доценко Борис Іванович, Косовенко Євген Вікторович, Семенов Леонід Антонович, Кузьмін В'ячеслав Павлович
МПК: F42B 15/01, G05B 11/01
Мітки: обертової, керування, викривлень, системі, компенсації, спосіб, ракети, амплітудно-фазових
Формула / Реферат:
Спосіб компенсації амплітудно-фазових викривлень у системі керування обертової ракети, заснований на вимірі динамічних викривлень, внесених елементами системи керування в модульований за допомогою синусно-косинусного перетворювача і гіроскопічного датчика кута крену управляючий сигнал, подачі на вхід слідкуючого приводу скоригованого сигналу, який відрізняється тим, що для компенсації амплітудних і фазових викривлень вхідний сигнал на привід...
Спосіб передстартової підготовки і пуску ракети
Номер патенту: 52420
Опубліковано: 16.12.2002
Автори: Кулик Марія Прокоповна, Мокін Олександр Васильович, Мокін Андрій Олександрович, Кулик Василь Степанович, Кузнецов Олександр Петрович, Грибачев Леонід Олексійович
МПК: F42B 15/00, B64G 5/00
Мітки: пуску, передстартової, спосіб, ракети, підготовки
Формула / Реферат:
Спосіб передстартової підготовки і пуску ракети, що містить транспортування ракети до пускового столу, встановлення її на пусковий стіл з фіксацією засобів утримання ракети на пусковому столі, проведення передстартових операцій, які включають заправлення компонентів палива, запуск рушійної установки на попередній ступінь тяги з контролем параметрів її роботи, пуск ракети при номінальних параметрах роботи рушійної установки з розфіксацією...
Спосіб підготовки і пуску ракети та корпус для здійснення способу
Номер патенту: 45928
Опубліковано: 15.04.2002
Автори: Агарков Анатолій Васильович, Колпаков Микола Артемович, Федоров Володимир Миколайович, Мокін Олександр Васильович
МПК: B64G 5/00
Мітки: способу, спосіб, підготовки, ракети, пуску, здійснення, корпус
Формула / Реферат:
1. Спосіб підготовки і пуску ракети, який містить проведення випробувань ракети контрольно-перевірочною апаратурою монтажно-випробувального корпусу, встановлення ракети на пускову установку, проведення випробувань ракети контрольно-перевірочною апаратурою пускової установки, фіксацію результатів випробувань телеметричною системою і використання телеметричної системи для приймання-передавання сигналів між ракетою і вимірювальним пунктом, який...
Спосіб дослідження рельєфних та фазових об’єктів в лазерному скануючому мікроскопі та пристрій для його здійснення
Номер патенту: 19905
Опубліковано: 25.12.1997
Автори: Ільченко Леонід Миколайович, Смирнов Євген Миколайович, Погорєлова Галина Федорівна, Обозненко Юрій Леонідович
МПК: G02B 21/00
Мітки: спосіб, фазових, рельєфних, лазерному, пристрій, мікроскопі, здійснення, дослідження, скануючому, об'єктів
Формула / Реферат:
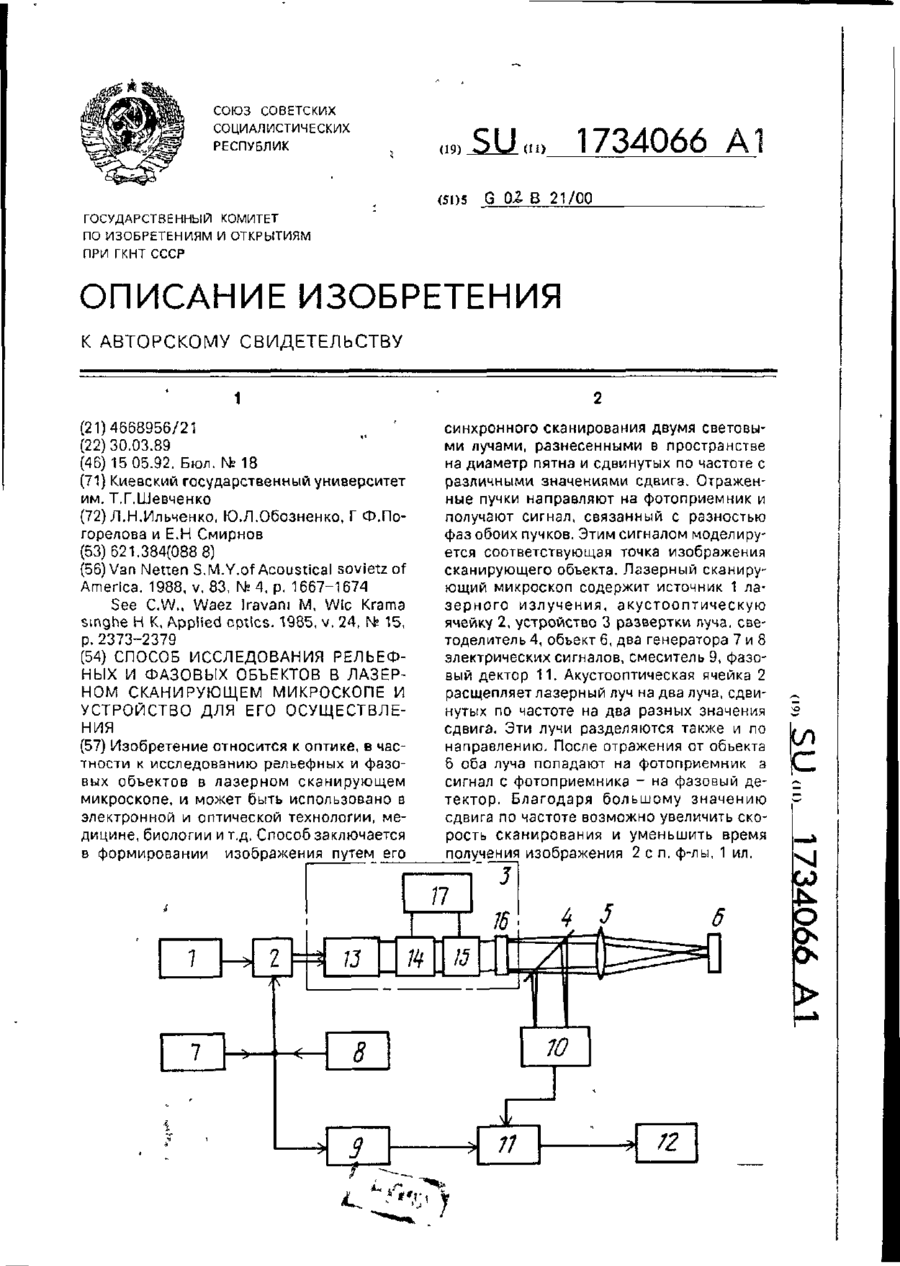
Формула изобретенияСпособ исследования рельефных и фазовых объектов в лазерном сканирующем микроскопе, заключающийся в том, что изображение объекта формируют путем сравнения фаз световых пучков, отраженных от поверхности объекта в двух точках, разнесенных на диаметр светового пятна, преобразования этой разности фаз в электрический сигнал с фазовой демодуляцией и модуляции электрическим сигналом соответствующей точки изображения,...
Cпосіб пуску ракети

Номер патенту: 47296
Опубліковано: 17.06.2002
Автори: Шаповалов Олександр Нікифорович, Федоров Володимир Миколайович, Мокін Олександр Васильович, Агарков Анатолій Васильович
Формула / Реферат:
Спосіб пуску ракети, який грунтується на фіксації ракети на пусковому столі, запуску рушійної установки на попередній ступінь тяги з контролем параметрів її роботи та розфіксацію засобів утримання при номінальних параметрах роботи рушійної установки, який відрізняється тим, що в ньому команду на розфіксацію засобів утримання видають при досягненні тяги рушійної установки величини, яка дорівнює 92-98% ваги ракети.
Попередній патент: Робочий орган культиватора
Наступний патент: Електробур
Випадковий патент: Спосіб вибору ендопротеза для ендоваскулярно-хірургічного лікування аневризм черевної аорти