Гідроначіпна система трактора
Номер патенту: 64079
Опубліковано: 16.02.2004
Автори: Лебедєв Анатолій Тихонович, Бойко Микола Федорович, Макаренко Микола Григорович
Формула / Реферат
Гідроначіпна система трактора, що містить гідравлічний насос, задавач з ручним керуванням, датчик тягового зусилля, датчик положення та зовнішній датчик, з'єднані з установкою поточного значення в регуляторі подачі рідини до гідроциліндрів начіпної системи, яка відрізняється тим, що система має щонайменше два зовнішніх датчики, розміщені на важелях начіпної системи і рознесені у поперечній площині трактора, а регулятор виконаний з можливістю роздільного керування гідроциліндрами незалежних важелів начіпної системи.
Текст
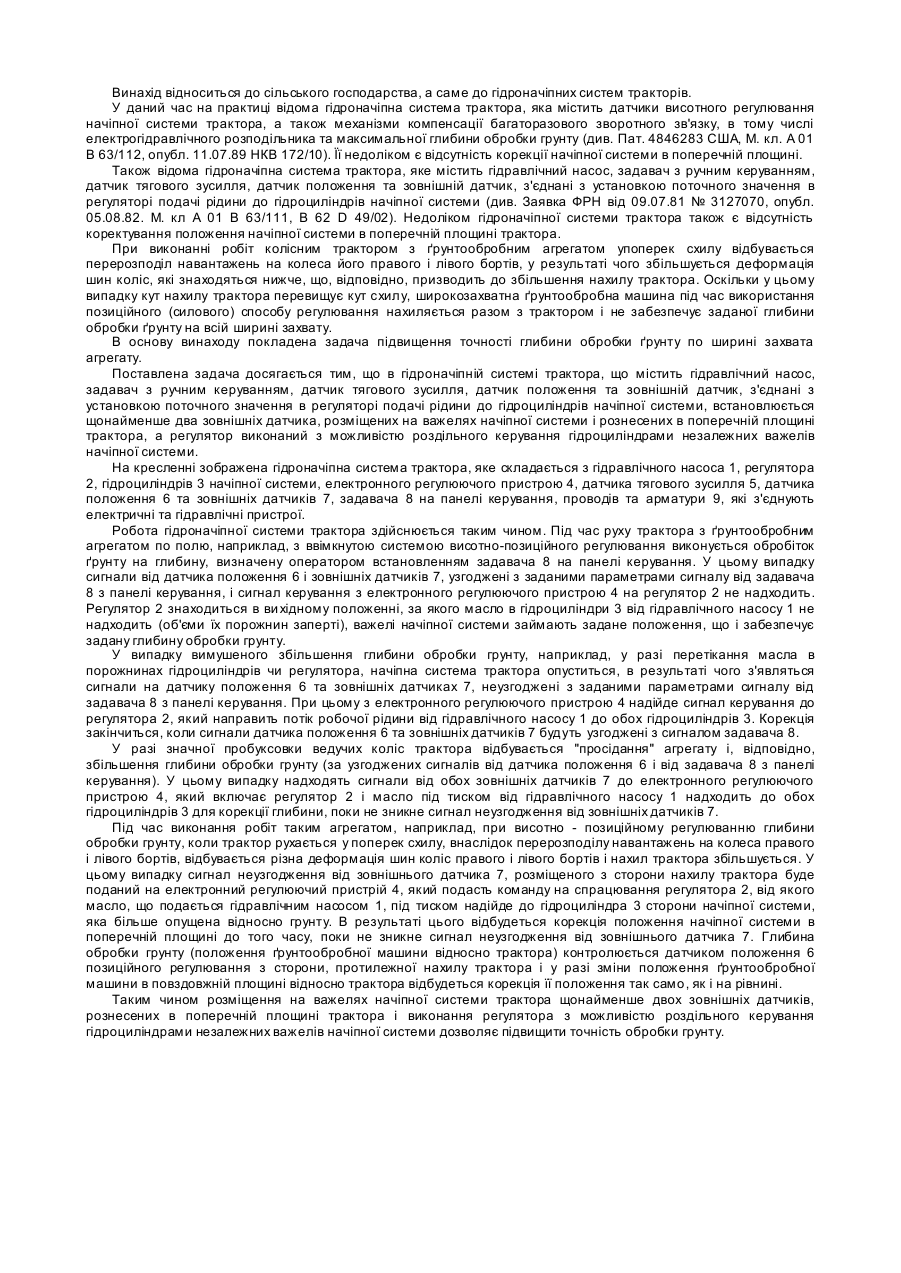
Винахід відноситься до сільського господарства, а саме до гідроначіпних систем тракторів. У даний час на практиці відома гідроначіпна система трактора, яка містить датчики висотного регулювання начіпної системи трактора, а також механізми компенсації багаторазового зворотного зв'язку, в тому числі електрогідравлічного розподільника та максимальної глибини обробки грунту (див. Пат. 4846283 США, М. кл. А 01 В 63/112, опубл. 11.07.89 НКВ 172/10). Її недоліком є відсутність корекції начіпної системи в поперечній площині. Також відома гідроначіпна система трактора, яке містить гідравлічний насос, задавач з ручним керуванням, датчик тягового зусилля, датчик положення та зовнішній датчик, з'єднані з установкою поточного значення в регуляторі подачі рідини до гідроциліндрів начіпної системи (див. Заявка ФРН від 09.07.81 № 3127070, опубл. 05.08.82. М. кл А 01 В 63/111, В 62 D 49/02). Недоліком гідроначіпної системи трактора також є відсутність коректування положення начіпної системи в поперечній площині трактора. При виконанні робіт колісним трактором з ґрунтообробним агрегатом упоперек схилу відбувається перерозподіл навантажень на колеса його правого і лівого бортів, у результаті чого збільшується деформація шин коліс, які знаходяться нижче, що, відповідно, призводить до збільшення нахилу трактора. Оскільки у цьому випадку кут нахилу трактора перевищує кут схилу, широкозахватна ґрунтообробна машина під час використання позиційного (силового) способу регулювання нахиляється разом з трактором і не забезпечує заданої глибини обробки ґрунту на всій ширині захвату. В основу винаходу покладена задача підвищення точності глибини обробки ґрунту по ширині захвата агрегату. Поставлена задача досягається тим, що в гідроначіпній системі трактора, що містить гідравлічний насос, задавач з ручним керуванням, датчик тягового зусилля, датчик положення та зовнішній датчик, з'єднані з установкою поточного значення в регуляторі подачі рідини до гідроциліндрів начіпної системи, встановлюється щонайменше два зовнішніх датчика, розміщених на важелях начіпної системи і рознесених в поперечній площині трактора, а регулятор виконаний з можливістю роздільного керування гідроциліндрами незалежних важелів начіпної системи. На кресленні зображена гідроначіпна система трактора, яке складається з гідравлічного насоса 1, регулятора 2, гідроциліндрів 3 начіпної системи, електронного регулюючого пристрою 4, датчика тягового зусилля 5, датчика положення 6 та зовнішніх датчиків 7, задавача 8 на панелі керування, проводів та арматури 9, які з'єднують електричні та гідравлічні пристрої. Робота гідроначіпної системи трактора здійснюється таким чином. Під час руху трактора з ґрунтообробним агрегатом по полю, наприклад, з ввімкнутою системою висотно-позиційного регулювання виконується обробіток ґрунту на глибину, визначену оператором встановленням задавача 8 на панелі керування. У цьому випадку сигнали від датчика положення 6 і зовнішніх датчиків 7, узгоджені з заданими параметрами сигналу від задавача 8 з панелі керування, і сигнал керування з електронного регулюючого пристрою 4 на регулятор 2 не надходить. Регулятор 2 знаходиться в ви хідному положенні, за якого масло в гідроциліндри 3 від гідравлічного насосу 1 не надходить (об'єми їх порожнин заперті), важелі начіпної системи займають задане положення, що і забезпечує задану глибину обробки грунту. У випадку вимушеного збільшення глибини обробки грунту, наприклад, у разі перетікання масла в порожнинах гідроциліндрів чи регулятора, начіпна система трактора опуститься, в результаті чого з'являться сигнали на датчику положення 6 та зовнішніх датчиках 7, неузгоджені з заданими параметрами сигналу від задавача 8 з панелі керування. При цьому з електронного регулюючого пристрою 4 надійде сигнал керування до регулятора 2, який направить потік робочої рідини від гідравлічного насосу 1 до обох гідроциліндрів 3. Корекція закінчиться, коли сигнали датчика положення 6 та зовнішніх датчиків 7 будуть узгоджені з сигналом задавача 8. У разі значної пробуксовки ведучих коліс трактора відбувається "просідання" агрегату і, відповідно, збільшення глибини обробки грунту (за узгоджених сигналів від датчика положення 6 і від задавача 8 з панелі керування). У цьому випадку надходять сигнали від обох зовнішніх датчиків 7 до електронного регулюючого пристрою 4, який включає регулятор 2 і масло під тиском від гідравлічного насосу 1 надходить до обох гідроциліндрів 3 для корекції глибини, поки не зникне сигнал неузгодження від зовнішніх датчиків 7. Під час виконання робіт таким агрегатом, наприклад, при висотно - позиційному регулюванню глибини обробки грунту, коли трактор рухається у поперек схилу, внаслідок перерозподілу навантажень на колеса правого і лівого бортів, відбувається різна деформація шин коліс правого і лівого бортів і нахил трактора збільшується. У цьому випадку сигнал неузгодження від зовнішнього датчика 7, розміщеного з сторони нахилу трактора буде поданий на електронний регулюючий пристрій 4, який подасть команду на спрацювання регулятора 2, від якого масло, що подається гідравлічним насосом 1, під тиском надійде до гідроциліндра 3 сторони начіпної системи, яка більше опущена відносно грунту. В результаті цього відбудеться корекція положення начіпної системи в поперечній площині до того часу, поки не зникне сигнал неузгодження від зовнішнього датчика 7. Глибина обробки грунту (положення ґрунтообробної машини відносно трактора) контролюється датчиком положення 6 позиційного регулювання з сторони, протилежної нахилу трактора і у разі зміни положення ґрунтообробної машини в повздовжній площині відносно трактора відбудеться корекція її положення так само, як і на рівнині. Таким чином розміщення на важелях начіпної системи трактора щонайменше двох зовнішніх датчиків, рознесених в поперечній площині трактора і виконання регулятора з можливістю роздільного керування гідроциліндрами незалежних важелів начіпної системи дозволяє підвищити точність обробки грунту.
ДивитисяДодаткова інформація
Назва патенту англійськоюHydraulic mounted tractor system
Автори англійськоюLebediev Anatolii Tykhonovych, Makarenko Mykola Hryhorovych
Назва патенту російськоюГидронавесная система трактора
Автори російськоюЛебедев Анатолий Тихонович, Макаренко Николай Григорьевич
МПК / Мітки
МПК: A01B 63/111, B62D 49/00
Мітки: система, трактора, гідроначіпна
Код посилання
<a href="https://ua.patents.su/2-64079-gidronachipna-sistema-traktora.html" target="_blank" rel="follow" title="База патентів України">Гідроначіпна система трактора</a>
Гідроначіпна система трактора
Номер патенту: 64078
Опубліковано: 16.02.2004
Автори: Бойко Микола Федорович, Макаренко Микола Григорович, Лебедєв Анатолій Тихонович
МПК: A01B 63/111, B62D 49/00
Мітки: гідроначіпна, трактора, система
Формула / Реферат:
Гідроначіпна система трактора, що містить гідравлічний насос, задавач з ручним керуванням, датчик тягового зусилля, датчик положення та зовнішній датчик з щупом, з'єднані з установкою поточного значення в регуляторі подачі рідини до гідроциліндрів начіпної системи, яка відрізняється тим, що щуп зовнішнього датчика виконаний пружним та має додатковий демпферний зв'язок із трактором.
Спосіб регулювання положення плуга по відношенню до трактора
Номер патенту: 49986
Опубліковано: 15.10.2002
Автори: Мироненко Валентин Григорович, Шквира Андрій Степанович, Шквира Зінаїда Андріївна, Левчук Микола Сидорович, Крохмаль Віктор Константинович, Масло Іван Павлович
МПК: A01B 63/111
Мітки: відношенню, плуга, спосіб, регулювання, положення, трактора
Формула / Реферат:
Спосіб регулювання положення плуга по відношенню до трактора, в якому вимірюють тиск на опорному колесі плуга і залежно від нього регулюють положення задніх та передніх шарнірів тяг механізму начіпки, за допомогою яких плуг кріпиться до трактора, який відрізняється тим, що додатково тиск вимірюють ще на одному опорному колесі плуга і положення шарнірів встановлюють таким, щоб виконувалось співвідношення:
Причіпний пристрій трактора
Номер патенту: 28770
Опубліковано: 16.10.2000
Автори: Дубина Валерій Іванович, Кропивко Сергій Володимирович
МПК: A01B 59/00
Мітки: причіпний, трактора, пристрій
Формула / Реферат:
Причіпний пристрій трактора, що має гідроциліндр, корпус якого шарнірно з'єднано з остовом трактора і тягою начіпного механізму, та причіпний гак, зв'язаний зі штоком гідроциліндра, який відрізняється тим, що причіпний гак зв'язано із штоком гідроциліндра через гідровібратор.
Пристрій для корегування навантаження на керованих колесах трактора
Номер патенту: 56488
Опубліковано: 15.05.2003
Автори: Надикто Володимир Трохимович, Шарко Сергій Валентинович, Мордасов Олексій Валерійович, Діордієв Володимир Трифонович
МПК: A01B 59/00
Мітки: колесах, трактора, керованих, пристрій, корегування, навантаження
Формула / Реферат:
1. Пристрій для корегування навантаження на керованих колесах трактора, який включає трактор з заднім навісним механізмом, який складається з центральної, нижніх тяг та гідроциліндра двосторонньої дії, який відрізняється тим, що гідроциліндр двосторонньої дії розташований на тракторі та нижнім своїм кінцем шарнірно з'єднаний з віссю, яка закріплена в нижній частині навісного механізму трактора.2. Пристрій за п. 1, який відрізняється...
Система керування вогнем танка
Номер патенту: 51805
Опубліковано: 16.12.2002
Автори: Фролов Леонід Андрійович, Бондаренко Олександр Григорович
МПК: F41G 5/00
Мітки: вогнем, танка, система, керування
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, датчик кутового положення гармати, жорстко установлений на башті і кінематично зв'язаний з гарматою, приціл, датчик кута вертикального наведення і датчик кута горизонтального наведення, які кінематично зв'язані з прицілом і відповідно з гарматою і баштою, а датчик кута вертикального наведення електрично зв'язаний з приводом гармати, яка відрізняється тим, що в систему...
Попередній патент: Гідроначіпна система трактора
Наступний патент: Кернорвач
Випадковий патент: Пристрій для поверхневої лазерної обробки