Гідроначіпна система трактора
Номер патенту: 64078
Опубліковано: 16.02.2004
Автори: Лебедєв Анатолій Тихонович, Макаренко Микола Григорович, Бойко Микола Федорович
Формула / Реферат
Гідроначіпна система трактора, що містить гідравлічний насос, задавач з ручним керуванням, датчик тягового зусилля, датчик положення та зовнішній датчик з щупом, з'єднані з установкою поточного значення в регуляторі подачі рідини до гідроциліндрів начіпної системи, яка відрізняється тим, що щуп зовнішнього датчика виконаний пружним та має додатковий демпферний зв'язок із трактором.
Текст
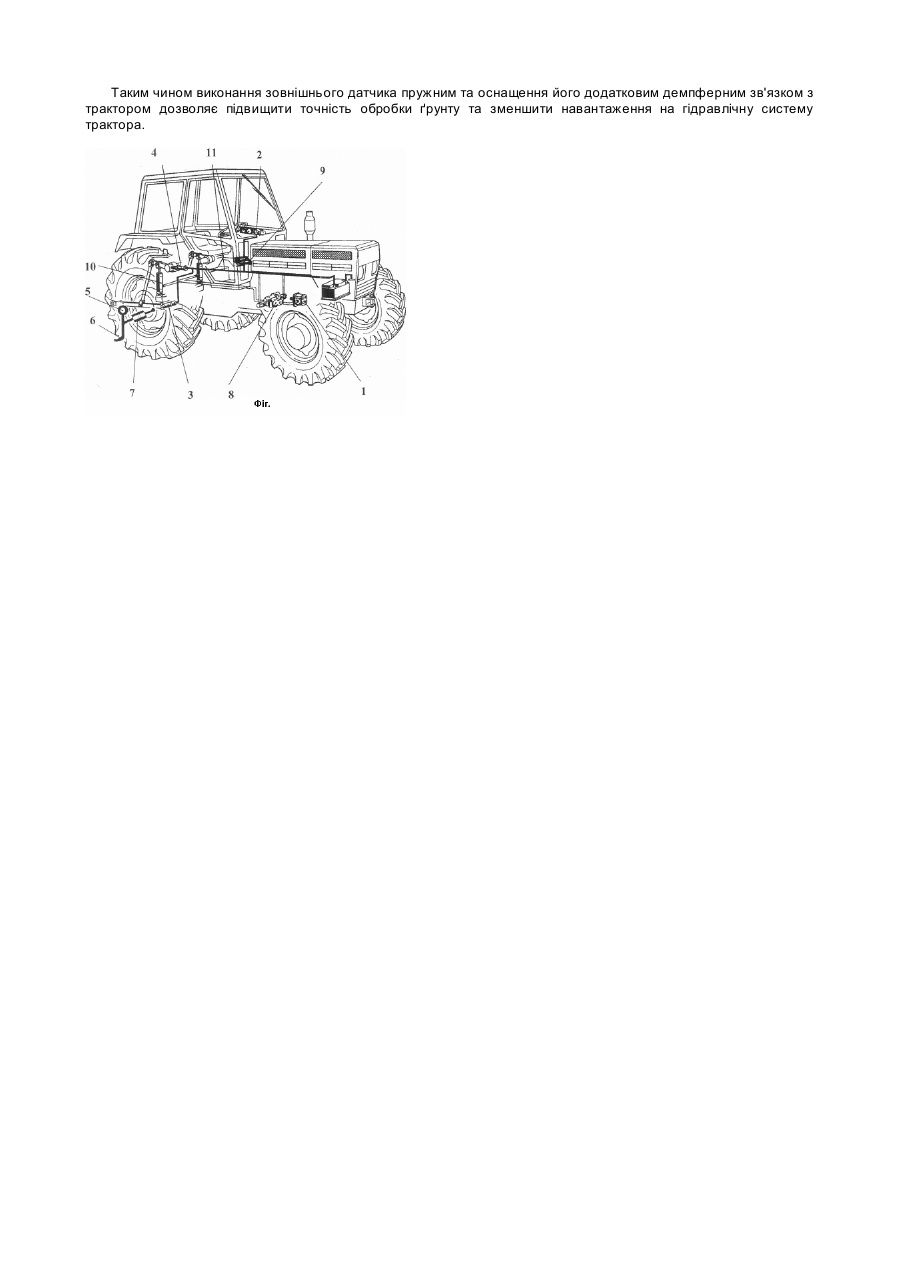
Винахід відноситься до сільського господарства, а саме до пристроїв керування гідроначіпною системою трактора. У даний час відома електрогідравлічна система керування під'ємним пристроєм трактора, яка містить задатчик значення необхідної глибини оранки, щупового зовнішнього датчика фактичного положення плуга відносно поверхні поля, з'єднаних з електронним блоком керування регулятором подачі рідини до гідроциліндра під'ємного пристрою начіпної системи (див. Заявка ФРН від 16.04.86 №3612764, опубл. 22.10.87 М.кл. А0163/11, A0163/111). Її недоліком є висока чутливість до мікрорельєфу поля. Також відоме керування гідроначіпною системою трактора, яке містить гідравлічний насос, задавач з ручним керуванням, датчик тягового зусилля, датчик положення та зовнішній датчик з щупом, з'єднаних з установкою поточного значення в регуляторі подачі рідини до гідроциліндрів начіпної системи (див. Заявка ФРН від 09.07.81 №3127070, опубл. 05.08.82 М.кл. А0163/111, B62D49/02). Недоліком такого керування гідроначіпною системою трактора також є висока чутливість до мікрорельєфу поля. При виконанні робіт трактором з ґрунтообробним агрегатом щуп зовнішнього датчика переміщується по поверхні поля та коректує залежно від реальної глибини обробки ґрунту положення начепленого агрегату, що забезпечується силовим чи позиційним регулюванням. Однак, коли зовнішній датчик зустрічається з нерівним мікрорельєфом - бугорком чи ямкою в регулятор подачі рідини до гідроциліндрів начіпної системи надходить хибний сигнал і змінюється глибина обробки ґрунту, яка не відповідає вимогам, заданим задатчиком. Після проходу щупом зовнішнього датчика нерівного мікрорельєфу знову надходить сигнал на коректування положення ґрунтообробного агрегату. В результаті не витримується необхідна глибина обробки ґрунту та перевантажується гідравлічна система з причини частих коректувань. В основу винаходу покладена задача підвищення точності обробки ґрунту та зменшення навантажень на гідравлічну систему трактора. Поставлена задача досягається тим, що в керуванні гідроначіпною системою трактора, що містить гідравлічний насос, задавач з ручним керуванням, датчик тягового зусилля, датчик положення та зовнішній датчик з щупом, з'єднані з установкою поточного значення в регуляторі подачі рідини до гідроциліндрів начіпної системи, щуп зовнішнього датчика виконаний пружним та має додатковий демпферний зв'язок з трактором. На кресленні зображене керування гідроначіпною системою трактора, яке складається з гідравлічного насоса 1, задавача 2 з ручним керуванням, датчика тягового зусилля 3, датчика положення 4, зовнішнього датчика 5 з пружним щупом 6, поршневого чи діафрагмового демпфера 7, регулятора 8 з електронним регулюючим пристроєм 9, гідроциліндрів 10, проводів та арматури 11, які з'єднують електричні та гідравлічні пристрої (див. фіг). Робота гідроначіпної системи трактора здійснюється таким чином. Під час руху трактора з ґрунтообробним агрегатом по полю, наприклад, з ввімкнутою системою висотнопозиційного регулювання виконується обробіток ґрунту на глибину, визначену оператором встановленням задавача 2 у відповідне положення. У цьому випадку сигнали від датчика положення 4, і зовнішніх датчиків 5 узгоджені з заданими параметрами сигналу від задавача 2 і сигнал керування від електронного регулюючого пристрою 9 на регулятор 8 не надходить. Регулятор 8 знаходиться в вихідному положенні, за якого масло в гідроциліндри 10 від масляного насоса 1 не надходить, а об'єми їх порожнин заперті, при цьому важелі начіпної системи займають відповідне положення, що і забезпечує задану глибину обробки ґрунту. При випадковому збільшенні глибини обробки фунту, наприклад, у разі перетікання масла в порожнинах гідроциліндрів чи регулятора, начіпна система трактора поступово опуститься, в результаті чого з'являються сигнали на датчику положення 4 та зовнішньому датчику 5 неузгоджені з заданими параметрами сигналу від задавача 2. При цьому з електронного регулюючого пристрою 9 надійде сигнал керування до регулятора 8, який направить потік робочої рідини від гідравлічного насосу 1 до гідроциліндрів 10. Корекція закінчиться, коли сигнали від датчика положення 4 та зовнішнього датчика 5 будуть узгоджені з сигналом задавача 2. У разі значної пробуксовки ведучих коліс трактора відбувається "просідання" машинно-тракторного агрегату і, відповідно, збільшення глибини обробки ґрунту при узгоджених сигналах від датчика положення 4 і від задавача 2. У цьому випадку пружний щуп 6 зовнішнього датчика 5, що ковзає по поверхні ґрунту, переміститься, оскільки при поступовому переміщенні пружного щупа 6 демпфер 7 не буде створювати опору його переміщенню. При цьому виникне сигнал неузгодження на зовнішньому датчику 5 і електронний регулюючий пристрій 9 подасть сигнал керування до регулятора 8 і масло під тиском від гідравлічного насосу 1 надходить до гідроциліндрів 10 для корекції глибини, поки не зникне сигнал неузгодження від зовнішнього датчика 5. Під час виконання робіт таким агрегатом на полі, де можуть бути мікро нерівності рельєфу при використанні, наприклад, висотно-позиційного регулювання глибини обробки ґрунту пружний щуп 6 зовнішнього датчика 5 ковзає по поверхні поля, при цьому від зовнішнього датчика 5 на електронний регулюючий пристрій 9 надходить інформація про реальну глибину обробки ґрунту. Коли пружний щуп 6 зовнішнього датчика 5 зустрінеться з мікро нерівністю на поверхні поля чи раптово зміниться глибина обробки ґрунту, в перший момент часу він зігнеться і виникне зусилля на розтягування демпфера 7, а зовнішній датчик 5 залишиться в вихідному положенні. Якщо із щупом зустрілась мікро нерівність, то після проходження її щуп 6 під дією пружних сил повернеться в вихідне положення, а на зовнішньому датчику 5 за цей час не виникне сигналу неузгодження і коректування глибини обробки фунту не відбудеться. Якщо щуп 6 зовнішнього датчика 5 пружно зігнувся внаслідок раптової зміни глибини обробки ґрунту і через 0,5-2с, залежно від чутливості демпфера 7, що визначається швидкістю руху трактора та параметрами мікрорельєфу, не повертається в вихідне положення, рухомі деталі демпфера 7 перемістяться, а щуп 6 зовнішнього датчика 5 вирівняється за рахунок пружних сил та переміститься відносно зовнішнього датчика 5, в результаті чого з'явиться сигнал неузгодження на зовнішньому датчику 5. Відповідно електронний регулюючий пристрій 9 подасть команду на спрацювання регулятора 8, від якого масло, що подається гідравлічним насосом 1, надійде до гідроциліндрів 10 і відбудеться коректування глибини обробки ґрунту, поки не узгодяться сигнали на електронному регулюючому пристрої від задавача 2 і від зовнішнього датчика 5. Таким чином виконання зовнішнього датчика пружним та оснащення його додатковим демпферним зв'язком з трактором дозволяє підвищити точність обробки ґрунту та зменшити навантаження на гідравлічну систему трактора.
ДивитисяДодаткова інформація
Назва патенту англійськоюHydraulic mounted tractor system
Автори англійськоюLebediev Anatolii Tykhonovych, Makarenko Mykola Hryhorovych
Назва патенту російськоюГидронавесная система трактора
Автори російськоюЛебедев Анатолий Тихонович, Макаренко Николай Григорьевич
МПК / Мітки
МПК: A01B 63/111, B62D 49/00
Мітки: трактора, гідроначіпна, система
Код посилання
<a href="https://ua.patents.su/2-64078-gidronachipna-sistema-traktora.html" target="_blank" rel="follow" title="База патентів України">Гідроначіпна система трактора</a>
Спосіб регулювання положення плуга по відношенню до трактора
Номер патенту: 49986
Опубліковано: 15.10.2002
Автори: Мироненко Валентин Григорович, Крохмаль Віктор Константинович, Масло Іван Павлович, Шквира Зінаїда Андріївна, Шквира Андрій Степанович, Левчук Микола Сидорович
МПК: A01B 63/111
Мітки: плуга, спосіб, трактора, регулювання, відношенню, положення
Формула / Реферат:
Спосіб регулювання положення плуга по відношенню до трактора, в якому вимірюють тиск на опорному колесі плуга і залежно від нього регулюють положення задніх та передніх шарнірів тяг механізму начіпки, за допомогою яких плуг кріпиться до трактора, який відрізняється тим, що додатково тиск вимірюють ще на одному опорному колесі плуга і положення шарнірів встановлюють таким, щоб виконувалось співвідношення:
Причіпний пристрій трактора
Номер патенту: 28770
Опубліковано: 16.10.2000
Автори: Кропивко Сергій Володимирович, Дубина Валерій Іванович
МПК: A01B 59/00
Мітки: причіпний, трактора, пристрій
Формула / Реферат:
Причіпний пристрій трактора, що має гідроциліндр, корпус якого шарнірно з'єднано з остовом трактора і тягою начіпного механізму, та причіпний гак, зв'язаний зі штоком гідроциліндра, який відрізняється тим, що причіпний гак зв'язано із штоком гідроциліндра через гідровібратор.
Пристрій для корегування навантаження на керованих колесах трактора
Номер патенту: 56488
Опубліковано: 15.05.2003
Автори: Діордієв Володимир Трифонович, Шарко Сергій Валентинович, Мордасов Олексій Валерійович, Надикто Володимир Трохимович
МПК: A01B 59/00
Мітки: корегування, колесах, керованих, пристрій, трактора, навантаження
Формула / Реферат:
1. Пристрій для корегування навантаження на керованих колесах трактора, який включає трактор з заднім навісним механізмом, який складається з центральної, нижніх тяг та гідроциліндра двосторонньої дії, який відрізняється тим, що гідроциліндр двосторонньої дії розташований на тракторі та нижнім своїм кінцем шарнірно з'єднаний з віссю, яка закріплена в нижній частині навісного механізму трактора.2. Пристрій за п. 1, який відрізняється...
Система керування вогнем танка
Номер патенту: 51805
Опубліковано: 16.12.2002
Автори: Бондаренко Олександр Григорович, Фролов Леонід Андрійович
МПК: F41G 5/00
Мітки: вогнем, керування, танка, система
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, датчик кутового положення гармати, жорстко установлений на башті і кінематично зв'язаний з гарматою, приціл, датчик кута вертикального наведення і датчик кута горизонтального наведення, які кінематично зв'язані з прицілом і відповідно з гарматою і баштою, а датчик кута вертикального наведення електрично зв'язаний з приводом гармати, яка відрізняється тим, що в систему...
Начіпний пристрій трактора
Номер патенту: 47194
Опубліковано: 17.06.2002
Автори: Запаренко Евген Іванович, Терещенко Іван Опанасович
МПК: A01B 59/00
Мітки: пристрій, трактора, начіпний
Формула / Реферат:
Начіпний пристрій, що включає верхню вісь із піднімальними важелями і центральною тягою, нижні повздовжні тяги, зв'язані з піднімальними важелями через розкоси і встановлені шарнірно на нижню вісь, з'єднану з рамою трактора через кронштейн і стяжку, який відрізняється тим, що в місці кріплення нижньої осі до рами трактора виконаний гвинтовий механізм, який являє собою зварний корпус, що складається із правої і лівої щік з отворами, які...
Попередній патент: Спосіб одержання струму несинусоїдальної форми
Наступний патент: Гідроначіпна система трактора
Випадковий патент: Бальзам "трипільська легенда"