Механізм дистанційного керування
Номер патенту: 65083
Опубліковано: 15.03.2004
Автори: Рудик Юрій Микитович, Карпачов Юрій Андрійович, Березнюк Володимир Володимирович, Гусев Олексій Володимирович
Формула / Реферат
1. Механізм дистанційного керування, що містить корпус, розташовану в ньому кульову опору, робочий орган і дві дуги з пазами, установлені поворотно на взаємно перпендикулярних півосях, розміщених у корпусі, який відрізняється тим, що він обладнаний автоматизованими приводами для відпрацьовування по заданій програмі координат положення робочого органа в просторі, останній виконаний у вигляді стакана з хвостовиком і встановлений у кульовій опорі з можливістю його повороту відносно координатних осей, причому поперечний переріз хвостовика стакана частково виконано прямокутним, а в частині, що залишилася - круглим, дуги сполучені з хвостовиком своїми пазами, а півосі кінематично зв'язані з відповідними приводами.
2. Механізм дистанційного керування за п. 1, який відрізняється тим, що в хвостовику стакана виконано нормально один до одного два отвори, у кожнім з яких розміщено підпружиненний елемент для вибору люфту по двох напрямках у з'єднанні хвостовика з дугами.
Текст
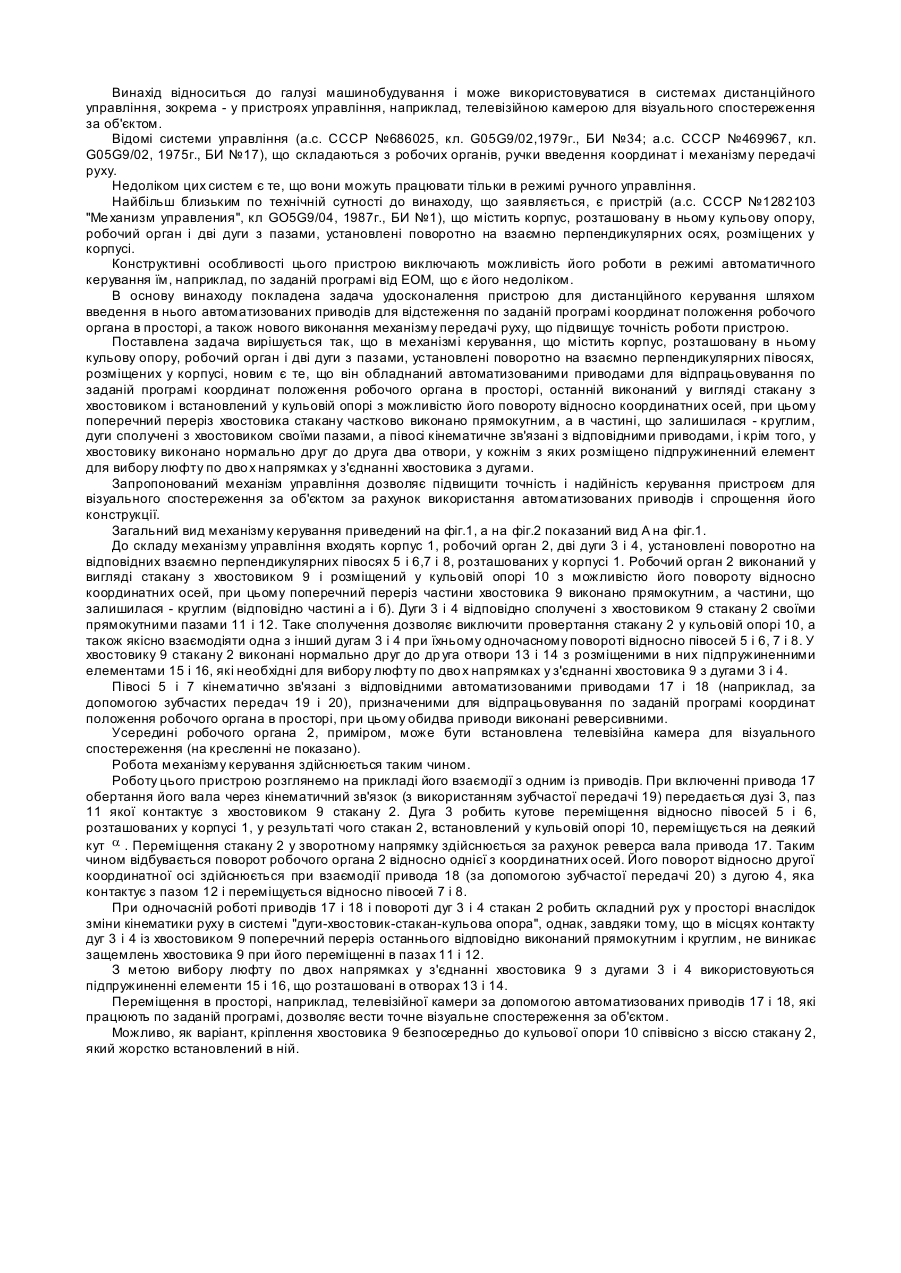
Винахід відноситься до галузі машинобудування і може використовуватися в системах дистанційного управління, зокрема - у пристроях управління, наприклад, телевізійною камерою для візуального спостереження за об'єктом. Відомі системи управління (а.с. СССР №686025, кл. G05G9/02,1979г., БИ №34; а.с. СССР №469967, кл. G05G9/02, 1975г., БИ №17), що складаються з робочих органів, ручки введення координат і механізму передачі руху. Недоліком цих систем є те, що вони можуть працювати тільки в режимі ручного управління. Найбільш близьким по технічній сутності до винаходу, що заявляється, є пристрій (а.с. СССР №1282103 "Ме ханизм управления", кл GО5G9/04, 1987г., БИ №1), що містить корпус, розташовану в ньому кульову опору, робочий орган і дві дуги з пазами, установлені поворотно на взаємно перпендикулярних осях, розміщених у корпусі. Конструктивні особливості цього пристрою виключають можливість його роботи в режимі автоматичного керування їм, наприклад, по заданій програмі від ЕОМ, що є його недоліком. В основу винаходу покладена задача удосконалення пристрою для дистанційного керування шляхом введення в нього автоматизованих приводів для відстеження по заданій програмі координат положення робочого органа в просторі, а також нового виконання механізму передачі руху, що підвищує точність роботи пристрою. Поставлена задача вирішується так, що в механізмі керування, що містить корпус, розташовану в ньому кульову опору, робочий орган і дві дуги з пазами, установлені поворотно на взаємно перпендикулярних півосях, розміщених у корпусі, новим є те, що він обладнаний автоматизованими приводами для відпрацьовування по заданій програмі координат положення робочого органа в просторі, останній виконаний у вигляді стакану з хвостовиком і встановлений у кульовій опорі з можливістю його повороту відносно координатних осей, при цьому поперечний переріз хвостовика стакану частково виконано прямокутним, а в частині, що залишилася - круглим, дуги сполучені з хвостовиком своїми пазами, а півосі кінематичне зв'язані з відповідними приводами, і крім того, у хвостовику виконано нормально друг до друга два отвори, у кожнім з яких розміщено підпружиненний елемент для вибору люфту по дво х напрямках у з'єднанні хвостовика з дугами. Запропонований механізм управління дозволяє підвищити точність і надійність керування пристроєм для візуального спостереження за об'єктом за рахунок використання автоматизованих приводів і спрощення його конструкції. Загальний вид механізму керування приведений на фіг.1, а на фіг.2 показаний вид А на фіг.1. До складу механізму управління входять корпус 1, робочий орган 2, дві дуги 3 і 4, установлені поворотно на відповідних взаємно перпендикулярних півосях 5 і 6,7 і 8, розташованих у корпусі 1. Робочий орган 2 виконаний у вигляді стакану з хвостовиком 9 і розміщений у кульовій опорі 10 з можливістю його повороту відносно координатних осей, при цьому поперечний переріз частини хвостовика 9 виконано прямокутним, а частини, що залишилася - круглим (відповідно частині а і б). Дуги 3 і 4 відповідно сполучені з хвостовиком 9 стакану 2 своїми прямокутними пазами 11 і 12. Таке сполучення дозволяє виключити провертання стакану 2 у кульовій опорі 10, а також якісно взаємодіяти одна з інший дугам 3 і 4 при їхньому одночасному повороті відносно півосей 5 і 6, 7 і 8. У хвостовику 9 стакану 2 виконані нормально друг до др уга отвори 13 і 14 з розміщеними в них підпружиненними елементами 15 і 16, які необхідні для вибору люфту по дво х напрямках у з'єднанні хвостовика 9 з дугами 3 і 4. Півосі 5 і 7 кінематично зв'язані з відповідними автоматизованими приводами 17 і 18 (наприклад, за допомогою зубчастих передач 19 і 20), призначеними для відпрацьовування по заданій програмі координат положення робочого органа в просторі, при цьому обидва приводи виконані реверсивними. Усередині робочого органа 2, приміром, може бути встановлена телевізійна камера для візуального спостереження (на кресленні не показано). Робота механізму керування здійснюється таким чином. Роботу цього пристрою розглянемо на прикладі його взаємодії з одним із приводів. При включенні привода 17 обертання його вала через кінематичний зв'язок (з використанням зубчастої передачі 19) передається дузі 3, паз 11 якої контактує з хвостовиком 9 стакану 2. Дуга 3 робить кутове переміщення відносно півосей 5 і 6, розташованих у корпусі 1, у результаті чого стакан 2, встановлений у кульовій опорі 10, переміщується на деякий кут a . Переміщення стакану 2 у зворотному напрямку здійснюється за рахунок реверса вала привода 17. Таким чином відбувається поворот робочого органа 2 відносно однієї з координатних осей. Його поворот відносно другої координатної осі здійснюється при взаємодії привода 18 (за допомогою зубчастої передачі 20) з дугою 4, яка контактує з пазом 12 і переміщується відносно півосей 7 і 8. При одночасній роботі приводів 17 і 18 і повороті дуг 3 і 4 стакан 2 робить складний рух у просторі внаслідок зміни кінематики руху в системі "дуги-хвостовик-стакан-кульова опора", однак, завдяки тому, що в місцях контакту дуг 3 і 4 із хвостовиком 9 поперечний переріз останнього відповідно виконаний прямокутним і круглим, не виникає защемлень хвостовика 9 при його переміщенні в пазах 11 і 12. З метою вибору люфту по двох напрямках у з'єднанні хвостовика 9 з дугами 3 і 4 використовуються підпружиненні елементи 15 і 16, що розташовані в отворах 13 і 14. Переміщення в просторі, наприклад, телевізійної камери за допомогою автоматизованих приводів 17 і 18, які працюють по заданій програмі, дозволяє вести точне візуальне спостереження за об'єктом. Можливо, як варіант, кріплення хвостовика 9 безпосередньо до кульової опори 10 співвісно з віссю стакану 2, який жорстко встановлений в ній.
ДивитисяДодаткова інформація
Назва патенту англійськоюRemote control unit
Автори англійськоюKarpachov Yurii Andriiovych, Rudyk Yurii Mykytovych, Berezniuk Volodymyr Volodymyrovych
Назва патенту російськоюУстройство дистанционного управления
Автори російськоюКарпачев Юрий Андреевич, Рудик Юрий Никитович, Березнюк Владимир Владимирович
МПК / Мітки
МПК: B25J 19/00, G05G 9/00
Мітки: керування, механізм, дистанційного
Код посилання
<a href="https://ua.patents.su/2-65083-mekhanizm-distancijjnogo-keruvannya.html" target="_blank" rel="follow" title="База патентів України">Механізм дистанційного керування</a>
Трос дистанційного керування
Номер патенту: 2263
Опубліковано: 15.01.2004
Автори: Кузнецов Олександр Федорович, Голенко Едуард Євгенович, Макутонін Юрій Михайлович
МПК: F16G 9/00
Мітки: дистанційного, трос, керування
Формула / Реферат:
Трос дистанційного керування, що містить коаксіально розташовані сердечник та зовнішній кожух, який відрізняється тим, що зовнішній кожух містить металеву стрічкову навивку з зовнішнім полімерним покриттям.
Пристрій дистанційного керування
Номер патенту: 1811
Опубліковано: 15.05.2003
Автори: Стаднік Микола Іванович, Мезніков Артур Володимирович
МПК: G08C 19/16
Мітки: керування, дистанційного, пристрій
Формула / Реферат:
Пристрій дистанційного керування, що містить блок дистанційного керування, переносний пульт керування і джерела живлення, який відрізняється тим, що він оснащений другим переносним пультом керування, з'єднаним однією кабельною перемичкою з блоком дистанційного керування.
Трос дистанційного керування

Номер патенту: 2264
Опубліковано: 15.01.2004
Автори: Макутонін Юрій Михайлович, Кузнецов Олександр Федорович, Голенко Едуард Євгенович
МПК: F16G 9/00
Мітки: дистанційного, трос, керування
Формула / Реферат:
1. Трос дистанційного керування, що містить коаксіально розташовані сердечник та кожух з напресованими відповідно прутком і ковпачком, який відрізняється тим, що на зовнішній поверхні ковпачка виконана різьба, а на ковпачку розташовані гайки та стопорні шайби з внутрішніми зубами.2. Трос за п. 1, який відрізняється тим, що ковпачок виконаний з алюмінієвого сплаву.
Трос дистанційного керування
Номер патенту: 1646
Опубліковано: 17.02.2003
Автори: Голенко Едуард Євгенович, Кравцов Анатолій Віталієвич, Макутонін Юрій Михайлович
МПК: F16G 9/00
Мітки: трос, дистанційного, керування
Формула / Реферат:
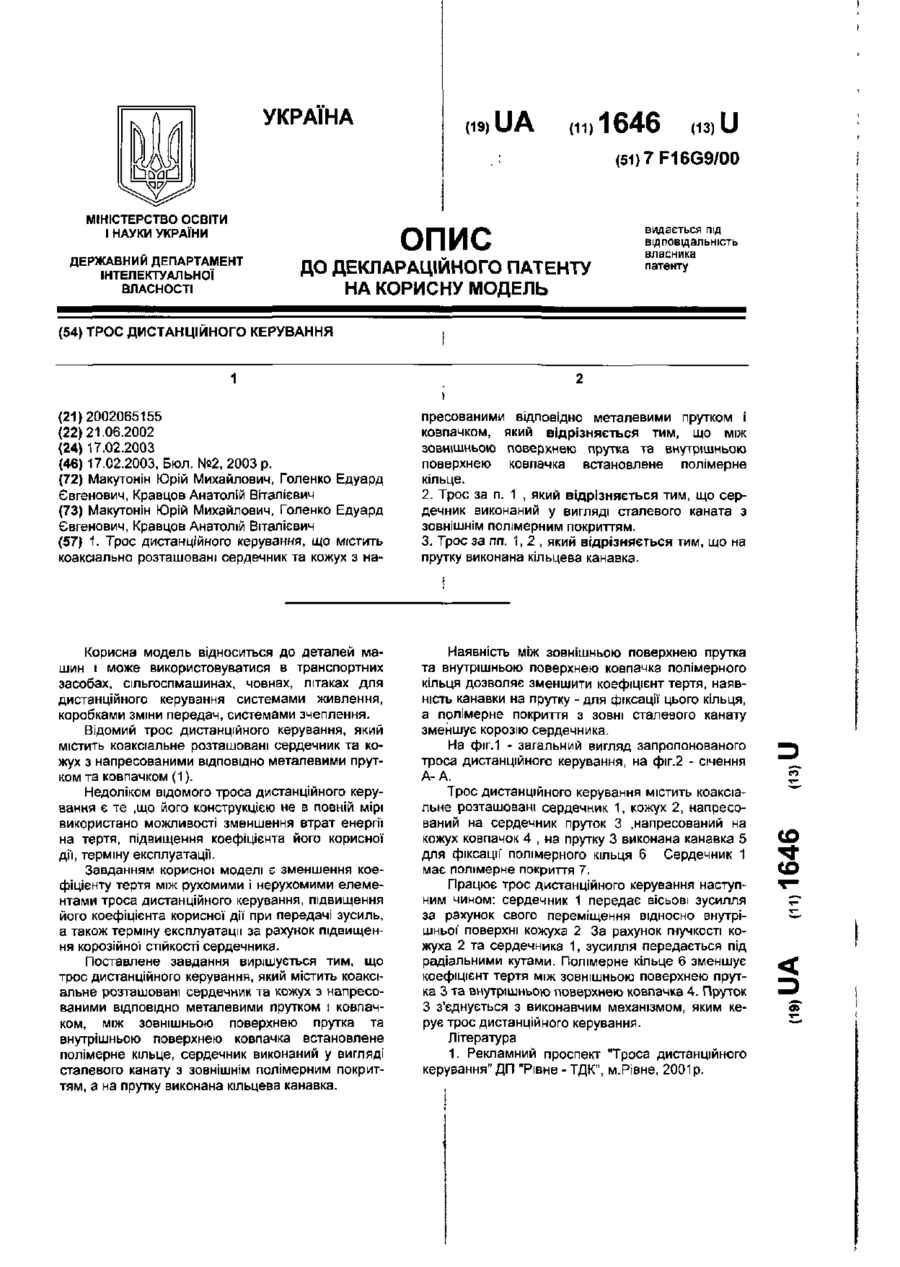
1. Трос дистанційного керування, що містить коаксіально розташовані сердечник та кожух з напресованими відповідно металевими прутком і ковпачком, який відрізняється тим, що між зовнішньою поверхнею прутка та внутрішньою поверхнею ковпачка встановлене полімерне кільце.2. Трос за п. 1 , який відрізняється тим, що сердечник виконаний у вигляді сталевого каната з зовнішнім полімерним покриттям.3. Трос за пп. 1, 2 , який...
Трос дистанційного керування
Номер патенту: 1609
Опубліковано: 15.01.2003
Автори: Голенко Едуард Євгенович, Кравцов Анатолій Віталієвич, Макутонін Юрій Михайлович
МПК: F16G 9/00
Мітки: керування, трос, дистанційного
Формула / Реферат:
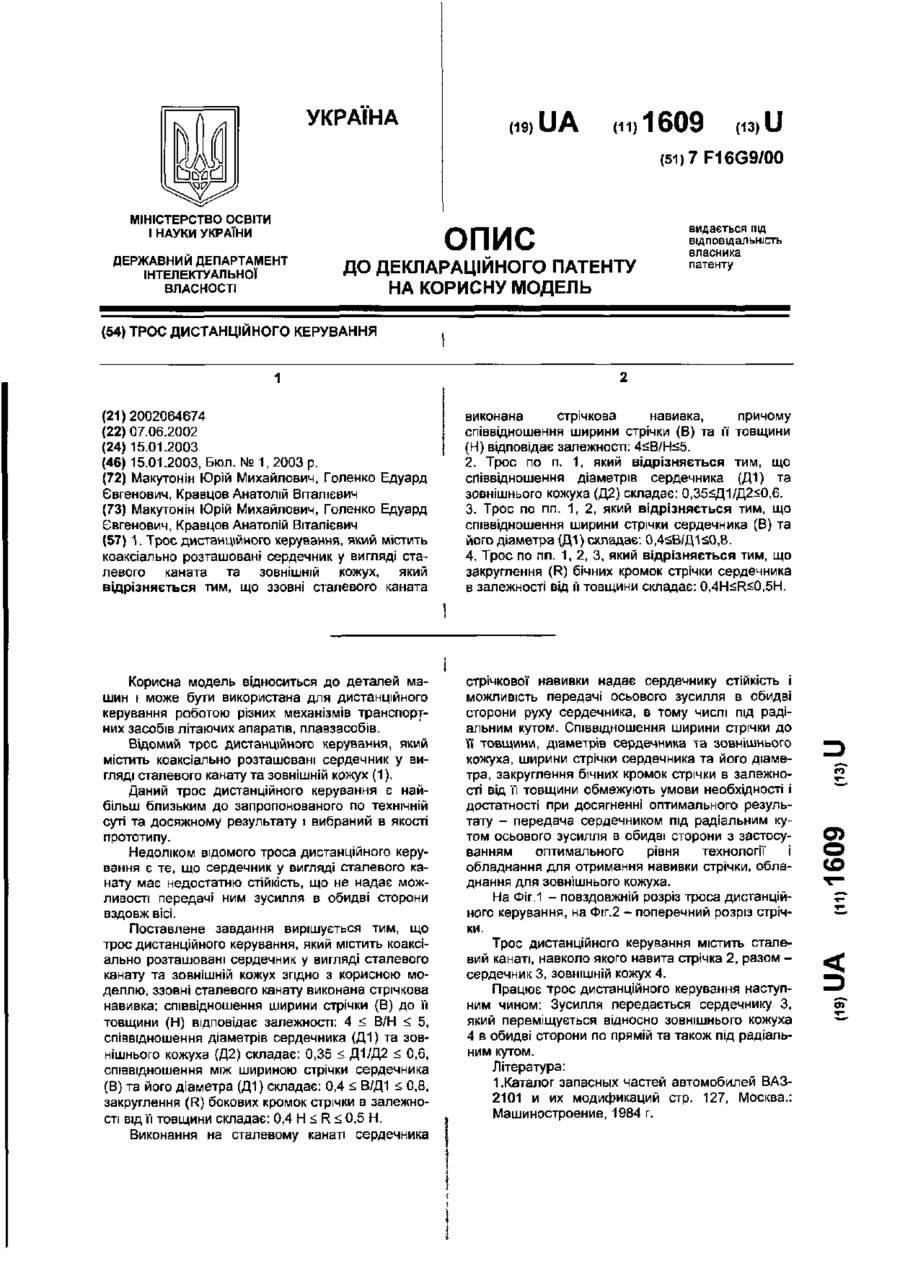
1. Трос дистанційного керування, який містить коаксіально розташовані сердечник у вигляді сталевого каната та зовнішній кожух, який відрізняється тим, що ззовні сталевого каната виконана стрічкова навивка, причому співвідношення ширини стрічки (В) та її товщини (Н) відповідає залежності: 4≤В/Н≤5.2. Трос по п. 1, який відрізняється тим, що співвідношення діаметрів сердечника (Д1) та зовнішнього кожуха (Д2) складає:...
Попередній патент: Болт
Наступний патент: Спосіб профілактичного лікування включених дефектів зубних рядів у дітей та підлітків
Випадковий патент: Спосіб дегазації гірських масивів і установка для його виконання