Інерційний рушій

Формула / Реферат
Інерційний рушій, що містить корпус з двома симетричними механізмами синхронного, зустрічного, нерівномірного обертання дебалансних тягарів, виконаних у вигляді пари зубчастих коліс з дебалансами, котрі взаємодіють з привідним двигуном, який відрізняється тим, що двигун обладнано блоком управління швидкістю обертання вихідного вала і покажчиком кута повороту колеса, при цьому блок управління забезпечує розгін дебалансних тягарів на куті повороту коліс від ![]() до
до ![]() , рівномірне обертання - на куті від
, рівномірне обертання - на куті від ![]() до
до ![]() і гальмування - на куті від
і гальмування - на куті від ![]() до
до ![]() , де кут повороту відраховується від лінії, паралельної осі симетрії механізмів обертання.
, де кут повороту відраховується від лінії, паралельної осі симетрії механізмів обертання.
Текст
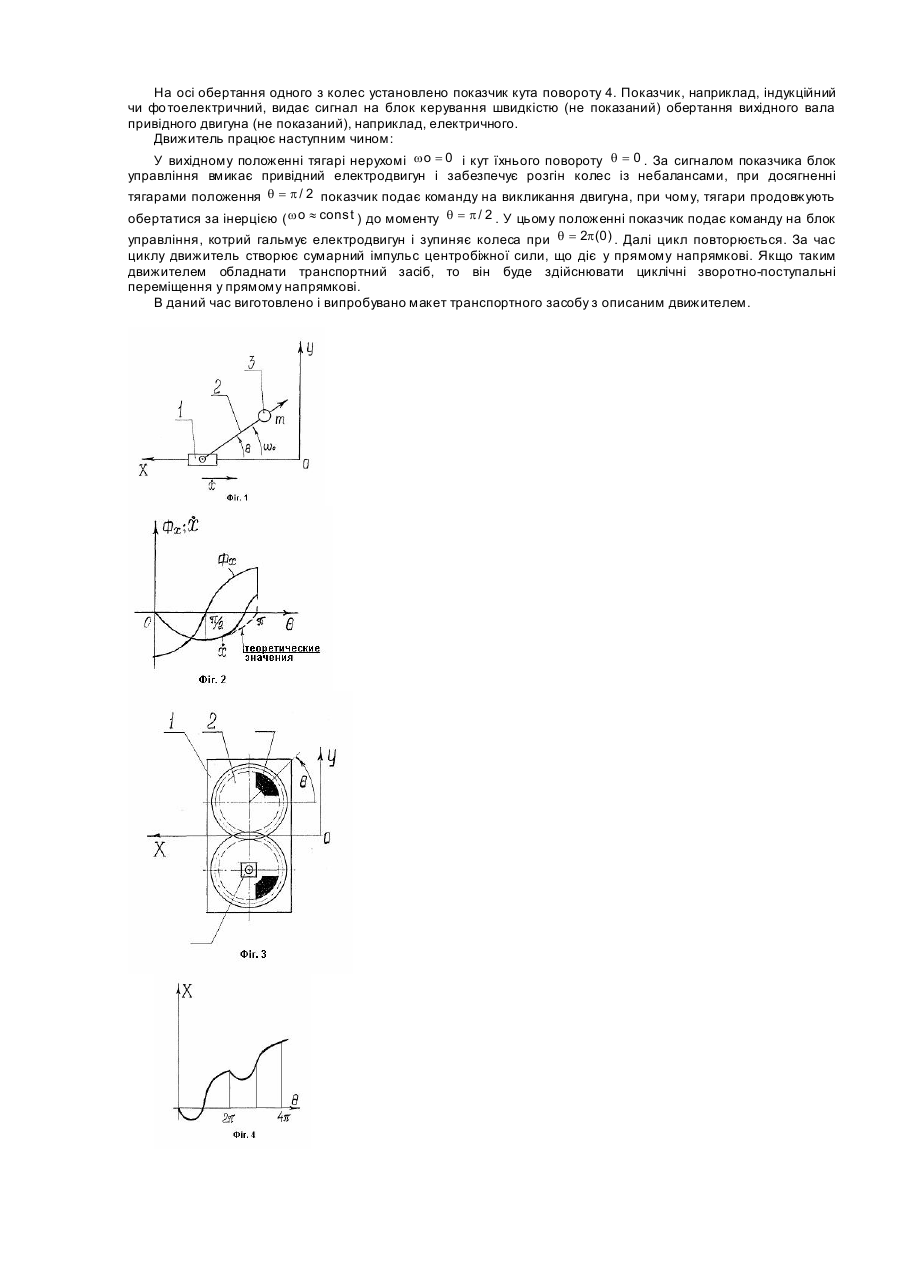
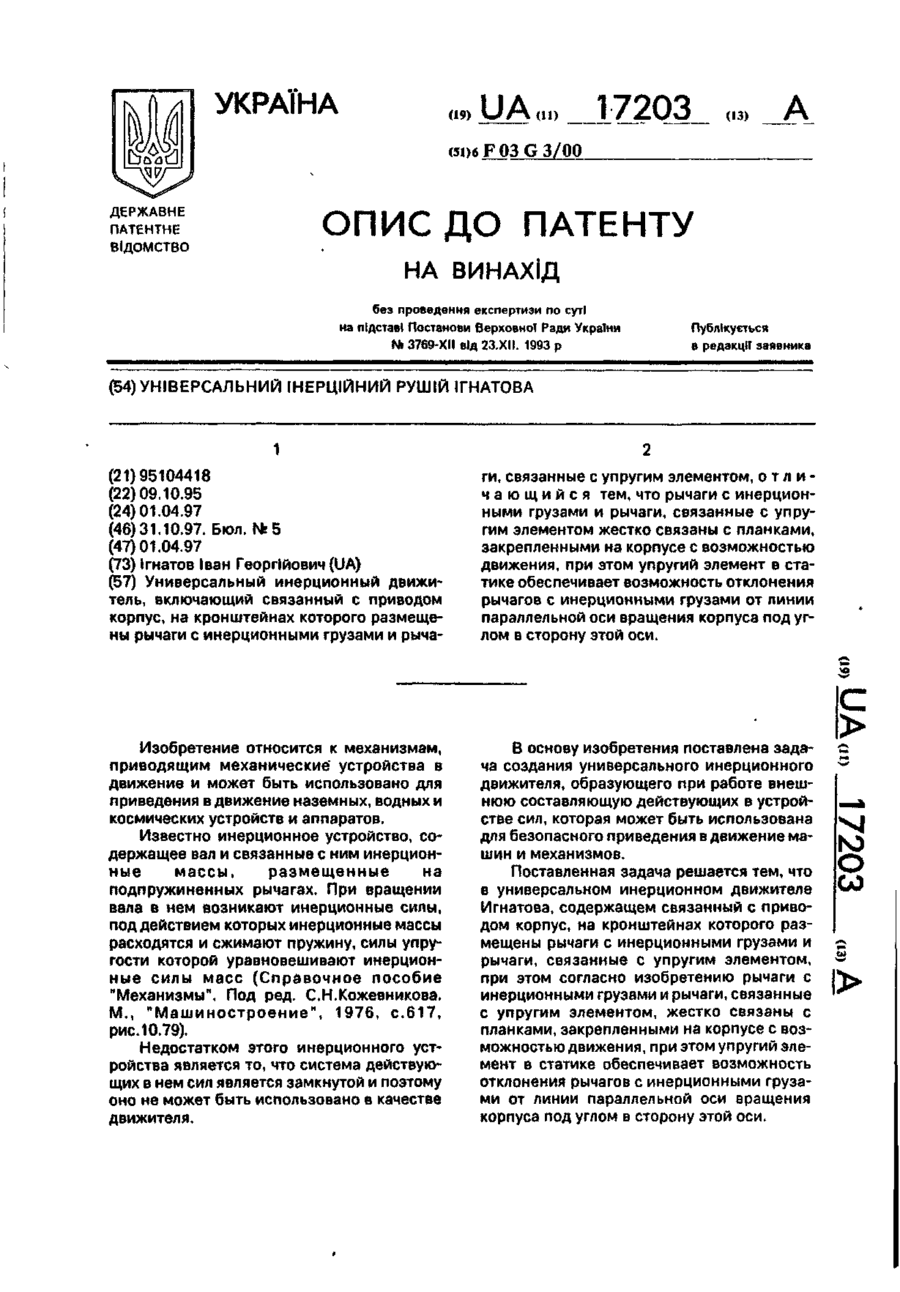
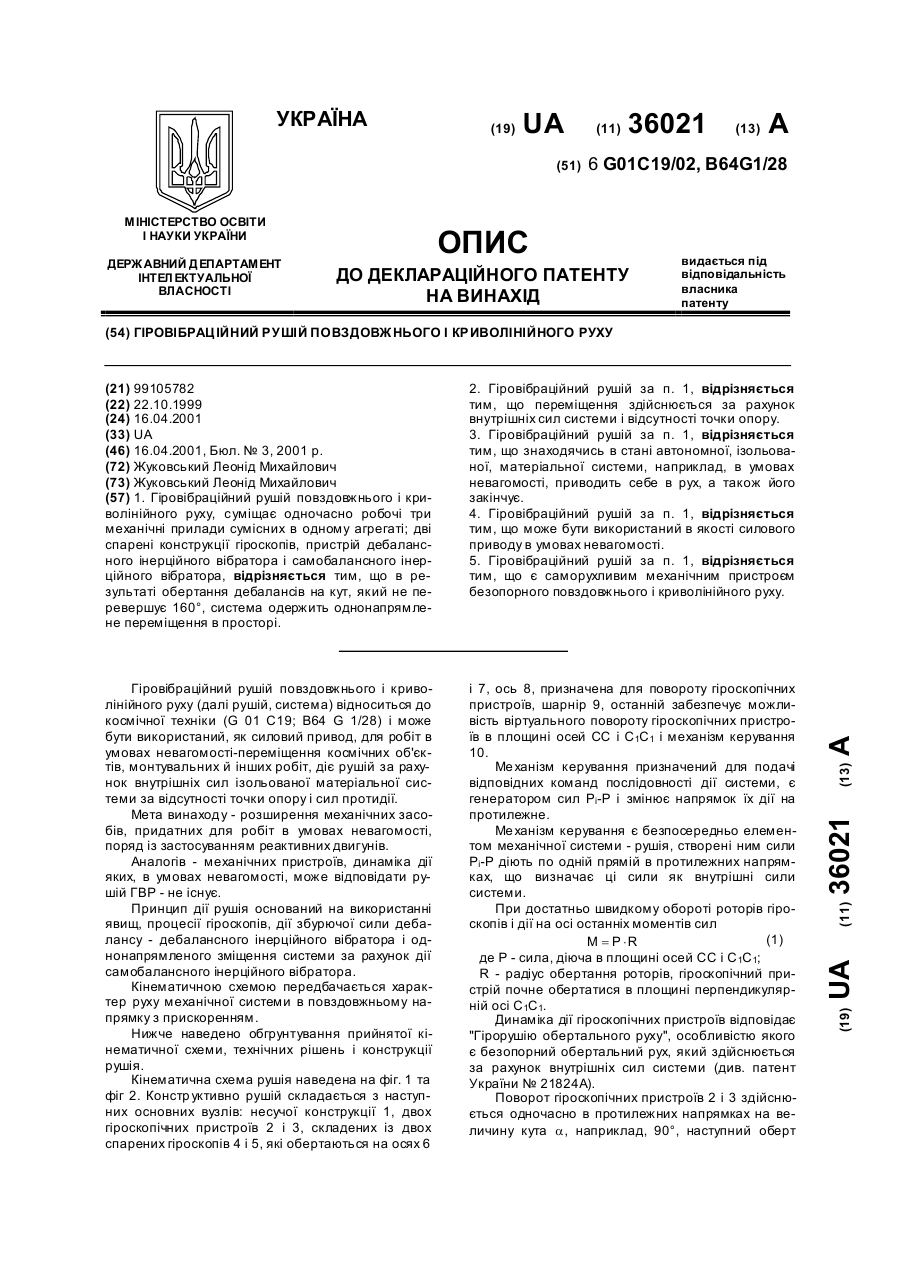
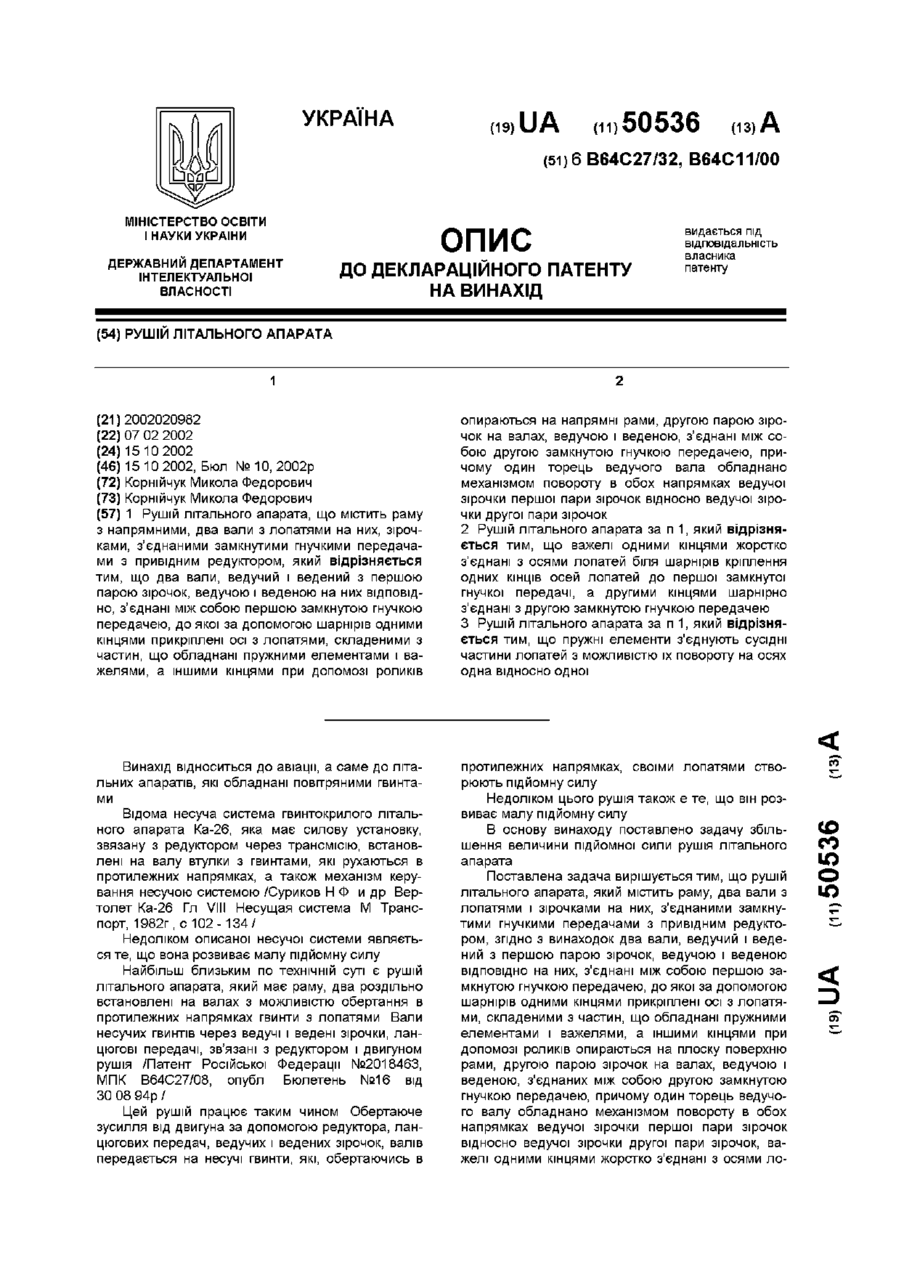
Винахід належить до джерел рушійної сили, що виникає при обертанні неурівноваженого тягара дебаланса. Відомий генератор тяги (1), що складається з корпуса, на котрому встановлено ротор, що обертається, з інерційними тягарами, пов'язаними з механізмами орієнтації. Недоліком такого пристрою є мале тягове зусилля, котре визначається величиною й напрямом рівнодіючої різноспрямованих центробіжних, тангенційних і коріолісових сил інерції, прикладених до діаметрально розміщених тягарів, що обертаються. Відомий інерційний рушій (2), що містить корпус з розміщеними на ньому двома симетричними механізмами синхронного, зустрічного, нерівномірного обертання дебалансних тягарів. Зазначені механізми складаються з кривошипів із тягарами, що взаємодіють через просторові кривошипно-шатунні механізми з приводним двигуном. Транспортний засіб з таким движителем може стало переміщуватися у прямому напрямкові лише за наявності зовнішньої гальмівної сили, котра компенсує імпульс сили, що діє у зворотному напрямку. За відсутності зазначеної сили транспортний засіб буде здійснювати періодичні зворотнопоступальні переміщення відносно свого центру мас, іншими словами "топтатися на місці". Відомий рушій (3), котрий містить корпус з розміщеними на ньому двома симетричними механізмами синхронного, зустрічного обертання дебалансних тягарів. Зазначені механізми складаються з пари зубчатих колес з вагами, при цьому одне з колес пов'язане з приводним двигуном. Такий движитель, як і раніше описаний, не може забезпечити стійкого односпрямованого переміщення транспортного засобу. В основу те хнічного рішення, що пропонується, поставлено завдання зменшення зворотного імпульса сили інерції дебалансного тягара. Технічним результатом зменшення зворотного імпульса є розширення можливостей рушія, оскільки для стійкого односпрямованого переміщення тренспортного засобу вже не потрібно прикладання суттєвого зовнішнього гальмівного зусилля (компенсуючої сили). Це досягається тим, що у відомому інерційномцу рушії, котрий містить корпус з двома симетричними механізмами синхронного, зустрічного, нерівномірного обертання дебалансних тягарів, виконаних у вигляді пари зубчастих коліс із дебалансами, взаємодіючий з привідним двигуном, двигун споряджений блоком управління швидкістю обертання вихідного вала й показчиком кута повороту колеса, при цьому блок управління забезпечує розгін дебалансних тягарів на куті повороту колеса від 0 до p / 2 , рівномірне обертання - на куті від p / 2 до 3 / 2p , гальмування - на куті від 3 / 2p до 2p , де кут повороту відраховується від лінії, паралельної осі симетрії механізмів обертання. Істотні ознаки конструкції - наявність блока управління швидкістю обертання вихідного вала привідного двигуна дозволяє: а) розганяти дебалансні тягарі у період часу, коли рівнодіюча сила інерції діє у зворотному напрямку і зменшується від кута повороту тягарів; б) підтримувати постійну швидкість обертання, коли рівнодіюча сила діє у прямому напрямкові; в) зменшувати швидкість обертання ватів, коли рівнодіюча сила діє у зворотному напрямкові і збільшується від кута повороту вагів; - наявність показчика повороту колеса дозволяє змінити швидкість обертання дебалансів згідно з зазначеним алгоритмом у залежності від кута повороту дебалансів. В результаті чого забезпечується перевищення прямого імпульсу над зворотним. На фіг.1 подано схему устрою для спостереження ефекту асиметричної дії сили, що зростає і спадає. На фіг.2 - діаграми, що підтверджують ефект асиметричної дії. На фіг.3 - принципова схема інерційного движителя. На фіг.4 - діаграма переміщення транспортного засобу, обладнаного запропоновинам движителем. Робота запропонованого інерційного движителя ґрунтується на ефекті асиметричної дії сили, що наростає і спадає, і полягає в тому, що інертна маса по-різному реагує на закон зміни рухаючої сили. За сили, що нарастає, кількість руху, котрий набувається масою, знаходиться у відповідності з докладеним імпульсом, за сили, що спадає, кількість руху, котра набувається, значно менше. Цей ефект подібний до відомої властивості інертної маси не реагувати на рухому силу, що швидко змінюється. Так, наприклад, масивна рамка електровимірювального приладу реагує лише на середнє значення електромагнітного моменту, що швидко змінюється (див., наприклад /4/, с.58). Ефект асиметричної дії можна спостерігати під час експерименту з візком, на якому встановлено кривошип, що вільно обертається, з дебалансним тягарем (див. фіг.1). У вихідному положенні возик загальмований, а дебаланс обертається за інерцією з деякою частотою w o . У момент знаходження дебаланса на осі Х (кут повороту Q = 0 ), возика відпускають і він, под дією складової 2 центробіжної сили інерції Фx = m × w o r × cos Q , де m - маса дебалансного тягара, r - радіус кривошипа, приходить у рух у від'ємному напрямі осі X. За час пів-оберту дебаланса вона змінить свою швидкість Х на протилежну (див. фіг.2), хоча у відповідності з законом збереження кількості руху вона в цей момент повинна зупинитися. Із діаграми випливає, що загалтна кількість руху, який набув возик, визначається імпульсом сили, що зростає (на куті повороту від p / 2 до p ). Якщо фазу розгону дебаланса від нерухомого стану до w o разгальмованого возика сумістити з фазою убування Фх згідно з ви щенаведеним рівнянням (кут від 0 до p / 2 ), фазу гальмування від w o до 0 з фазою зростання Фх (кут від 3 / 2p , до 2p ), а на куті від p / 2 до 3 / 2p забезпечити швидкість w o » const , то возик здійснить зворотно-поступальне переміщення у прямому напрямкові (невеликий відкат назад і значне переміщення вперед (див. фіг.4). Це свідчить про перевищення прямого імпульсу над зворотнім. Інерційний движитель складається з основи 1, на якій розміщена зубчата пара, що складається з зубчатих колес 2 з тягарами-дебалансами. На осі обертання одного з колес установлено показчик кута повороту 4. Показчик, наприклад, індукційний чи фо тоелектричний, видає сигнал на блок керування швидкістю (не показаний) обертання вихідного вала привідного двигуна (не показаний), наприклад, електричного. Движитель працює наступним чином: У вихідному положенні тягарі нерухомі w o = 0 і кут їхнього повороту q = 0 . За сигналом показчика блок управління вмикає привідний електродвигун і забезпечує розгін колес із небалансами, при досягненні тягарами положення q = p / 2 показчик подає команду на викликання двигуна, при чому, тягари продовжують обертатися за інерцією ( w o » const ) до моменту q = p / 2 . У цьому положенні показчик подає команду на блок управління, котрий гальмує електродвигун і зупиняє колеса при q = 2p (0 ) . Далі цикл повторюється. За час циклу движитель створює сумарний імпульс центробіжної сили, що діє у прямому напрямкові. Якщо таким движителем обладнати транспортний засіб, то він буде здійснювати циклічні зворотно-поступальні переміщення у прямому напрямкові. В даний час виготовлено і випробувано макет транспортного засобу з описаним движителем.
ДивитисяДодаткова інформація
Назва патенту англійськоюInertial propeller
Автори англійськоюSamonov Serhii Anatoliiovych
Назва патенту російськоюИнерционный движитель
Автори російськоюСамонов Сергей Анатольевич
МПК / Мітки
МПК: F03G 3/00
Мітки: рушій, інерційний
Код посилання
<a href="https://ua.patents.su/2-66683-inercijjnijj-rushijj.html" target="_blank" rel="follow" title="База патентів України">Інерційний рушій</a>
Універсальний інерційний рушій ігнатова
Номер патенту: 17203
Опубліковано: 01.04.1997
Автори: Черезова Олена Іванівна, Ігнатов Іван Георгійович
МПК: F03G 3/06
Мітки: інерційний, рушій, універсальний, ігнатова
Формула / Реферат:
Универсальный инерционный движитель, включающий связанный с приводом корпус, на кронштейнах которого размещены рычаги с инерционными грузами и рычаги, связанные с упругим элементом, отличающийся тем, что рычаги с инерционными грузами и рычаги, связанные с упругим элементом жестко связаны с планками, закрепленными на корпусе с возможностью движения, при этом упругий элемент в статике обеспечивает возможность отклонения рычагов с инерционными...
Гіровібраційний рушій повздовжнього і криволінійного руху
Номер патенту: 36021
Опубліковано: 16.04.2001
Автор: Жуковський Леонід Михайлович
МПК: G01C 19/00, B64G 1/28
Мітки: гіровібраційний, криволінійного, руху, рушій, повздовжнього
Текст:
...дію; - оберти ротора гіроскопа по колу рад. R., при якому виникає збурююча сила F, даний пристрій працює як дебалансний інерційний вібратор; - спарена робота двох гіроскопічних пристроїв обертання останніх по колу рад. R, в даному разі пристрій працює як самобалансуючий інерційний вібратор. Останній здійснює однонапрямлене безопорне зміщення агрегату, яке досягається за рахунок повороту гіроскопічних пристроїв на кут менше a=160°....
Роторно-гвинтовий рушій

Номер патенту: 12583
Опубліковано: 11.10.1999
Автор: Синельник Анатолій Іванович
МПК: F01C 1/00, B64C 11/00
Мітки: роторно-гвинтовий, рушій
Формула / Реферат:
Роторно-гнинтовинй рушій, що містить ведучий вал і ротори, які з'єднані зі втулкою з можливістю вільного обертання відносно осей симетрії роторів і радіально розташовані відносно ведучого валу, який відрізняється тим, що ведучий вал з'єднаний зі втулкою з можливістю вільного обертання відносно втулки, а ротори зв'язані з ведучим валом механічними передачами.
Рушій літального апарата
Номер патенту: 50536
Опубліковано: 15.10.2002
Автор: Корнійчук Микола Федорович
МПК: B64C 27/32, B64C 11/00
Мітки: апарата, рушій, літального
Формула / Реферат:
1. Рушій літального апарата, що містить раму з напрямними, два вали з лопатями на них, зірочками, з’єднаними замкнутими гнучкими передачами з привідним редуктором, який відрізняється тим, що два вали, ведучий і ведений з першою парою зірочок, ведучою і веденою на них відповідно, з’єднані між собою першою замкнутою гнучкою передачею, до якої за допомогою шарнірів одними кінцями прикріплені осі з лопатями, складеними з частин, що обладнані...
Інерційний планетарний трансформатор моменту
Номер патенту: 55495
Опубліковано: 15.04.2003
Автор: Данилишин Григорій Михайлович
МПК: F16H 33/00, F16H 31/00
Мітки: трансформатор, інерційний, планетарний, моменту
Формула / Реферат:
1. Інерційний планетарний трансформатор моменту з ведучою епіциклічною шестірнею, веденим водилом щонайменше двома сателітами з кінематично зв'язаними з ними дебалансами, який відрізняється тим, що кожен з дебалансів встановлений з можливістю обертання відносно осі, перпендикулярної до одної з діаметральних площин відповідного сателіта, і зв'язаний з водилом конічною передачею з передаточним числом рівним одиниці, одне з коліс якої жорстко...
Попередній патент: Ортодонтичний профілактичний апарат
Наступний патент: Складений валок
Випадковий патент: Парогенератор