Гіровібраційний рушій повздовжнього і криволінійного руху



Текст
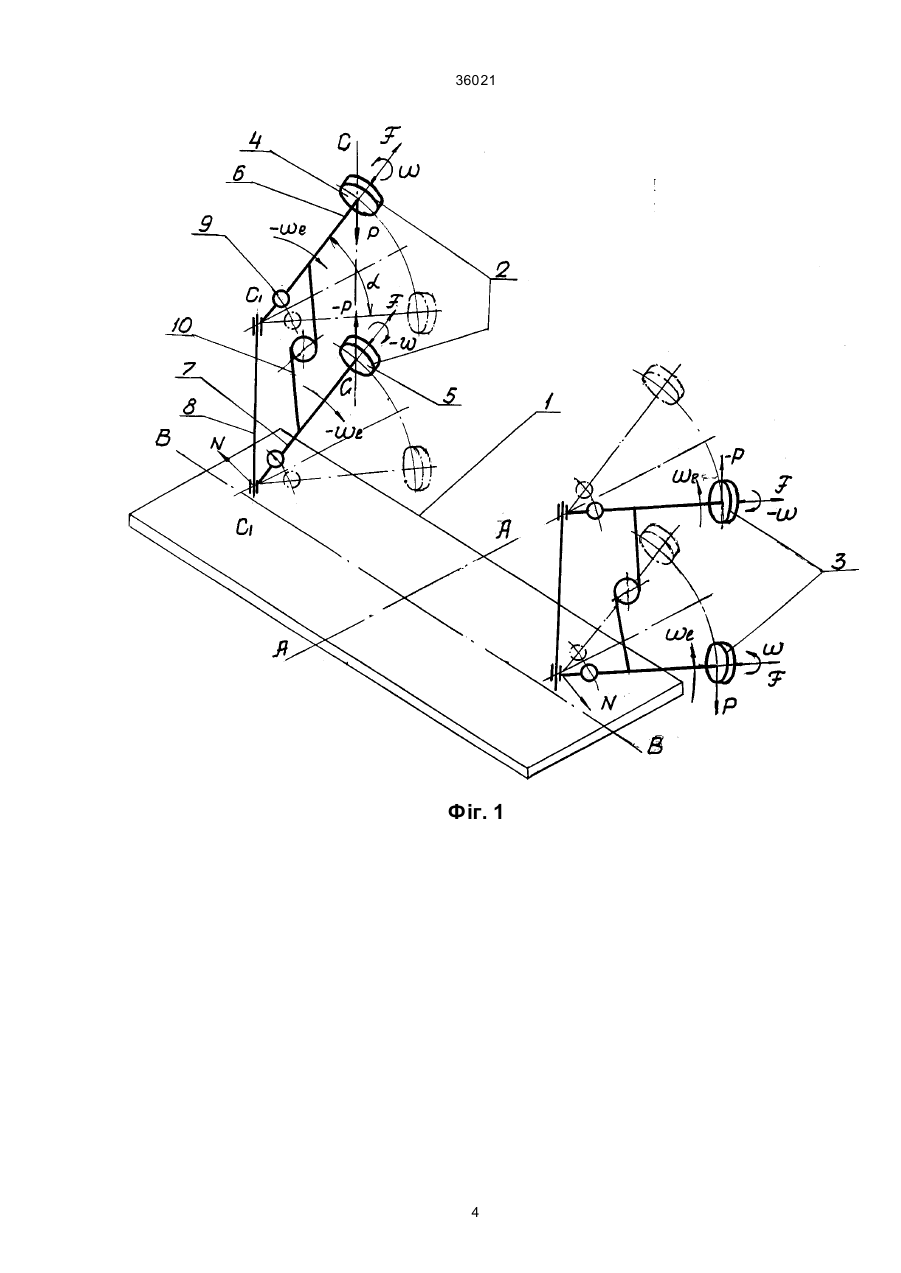
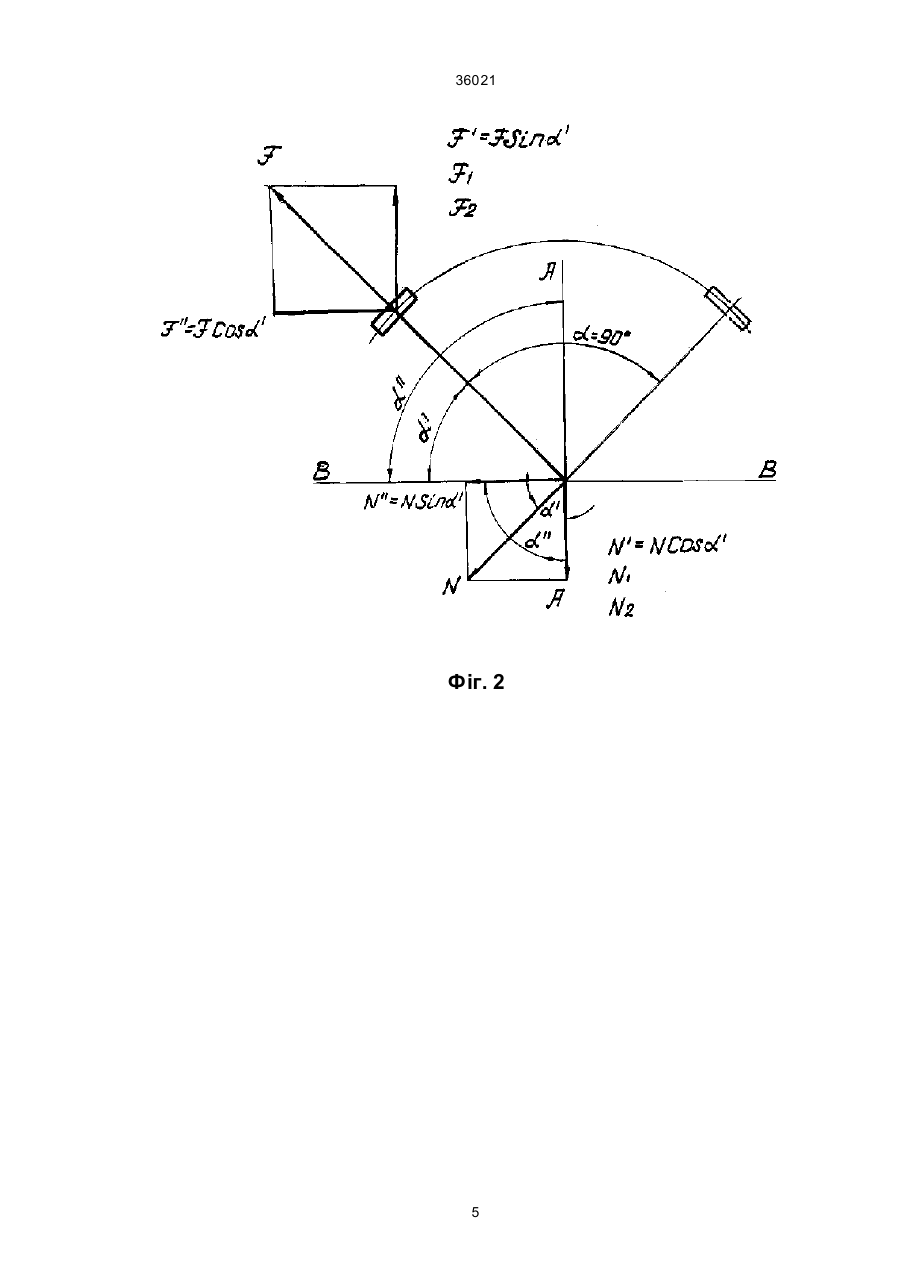
1. Гіровібраційний рушій повздовжнього і криволінійного руху, суміщає одночасно робочі три механічні прилади сумісних в одному агрегаті; дві спарені конструкції гіроскопів, пристрій дебалансного інерційного вібратора і самобалансного інерційного вібратора, відрізняється тим, що в результаті обертання дебалансів на кут, який не перевершує 160°, система одержить однонапрямлене переміщення в просторі. 36021 проходить в напрямку, протилежному попередньому. При розгляді сил, які діють в системі, потрібно враховувати приведені нижче особливості динаміки прецесійного руху: - явище процесії виникає за рахунок дії сил інерції, при цьому, на відміну від випадку дії сил матеріальних тіл, сили протидії відсутні; - в процесі становлення руху процесії відсутній такий елемент руху як прискорення, сила безпосередньо визначає швидкість руху. Поворот гіроскопічного пристрою - рух процесії здійснюється за рахунок опору сил інерції маси ротора руху з поворотним прискоренням і виникаючому при цьому гіроскопічному моменту в площині, перпендикулярній осі С 1С1, величина останнього визначається за формулою Mr = PR = Iww e (2) де момент інерції ротора I = Закон формування, в динаміці, діючих сил визначається графічною побудовою (фіг. 2). Сили, створені одним гіроскопом, котрі безпосередньо визначають зміщення системи, є (3 і 4); N =P F = mRw e 2 Повздовжні складові сил N і Р, які діють перпендикулярно осі ВВ, визначаються з рівнянь: (5) N¢ = N cosa ¢ F¢ = F sina ¢ (6) де a¢- кут повороту рад. R. відносно осі ВВ. Також сили поперечні, які діють перпендикулярно осі АА1 з рівнянь: (7) N¢¢ = N sina ¢ (8) F¢¢ = F cos a ¢ Нижче наведено орієнтувальний розрахунок сил, які діють в системі, з реально прийнятними параметрами елементів конструкції. Прийнято: Р=10 кг, R= 100 см, r2=150 см, w=200 1/сек, g=1000 см/сек 2, прийнято округлене значення кута a¢=45°, a²=90°. При прийнятих параметрах кутова швидкість прецесії w визначається за формулою (4) PR = Iww e 2 m×r , 2 де m – маса; r - радіус ротора; w - кутова швидкість оберту ротора; we- кутова швидкість оберту процесії. В результаті дії гіроскопічного моменту Mr і повороту ротора гіроскопа по колу радіуса R, на вісь 8 будуть діяти сили, постійні за величиною і змінені за напрямком, визначені рівнянням P ×R (3) N= =P R При обертанні ротора - незрівноваженної маси дебаланса, по колу рад. R, виникає збурююча сила, яка діє в напрямку рад. R, постійна за величиною і змінна за напрямком, величина останньої визначається за формулою (4) F = M × R × we2 Кінематичною схемою рушія передбачено виконання дії і одночасної роботи трьох механічних пристроїв, суміщених в одному агрегаті: - двох спарених гіроскопів 4 і 5, в результаті дії яких гіроскопічні пристрої 2 і 3 проходять в безопорну обертальну дію; - оберти ротора гіроскопа по колу рад. R., при якому виникає збурююча сила F, даний пристрій працює як дебалансний інерційний вібратор; - спарена робота двох гіроскопічних пристроїв обертання останніх по колу рад. R, в даному разі пристрій працює як самобалансуючий інерційний вібратор. Останній здійснює однонапрямлене безопорне зміщення агрегату, яке досягається за рахунок повороту гіроскопічних пристроїв на кут менше a=160°. Переміщення системи, в результаті дії дебалансного інерційного вібратора, буде мати повздовжній рух з прискоренням за рахунок повторної дії імпульсів сил та властивості маси системи її інертності. При різних величинах повороту гіроскопічних пристроїв на кут a, що забезпечується довготривалістю дії сил Рі-Р, система буде переміщуватися по криволінійній траєкторії. Передбачається, що інерція маси системи буде гаситися випереджаючою зміною напрямку дії сил Рі-Р. Враховуючи значення моменту інерції, 2 mr = I , після перетворення, кутова швидкість 2 буде визначатися рівнянням 2gR we = (9) r 2w підставляючи відповідні числові значення знаходимо 2 × 1000 × 100 1 we = »7 150 × 200 сек Підставляючи в рівняння (3 і 4) відповідні цифрові значення, знаходимо: N=Р=10 кг; F = m × R × w e2 = (P × g) × R × we 2 = (10 ×100 ) × 100 × 49 » 50 кг З рівнянь (5 і 6) визначаємо повздовжні складові сили початкового моменту повороту, при значенні a¢=45°; N1 = N¢ = N × cos 45o = 10 × 0,7 = 7 кг F1 = F¢ = F × sin45o = 50 × 0,7 = 35 кг При повороті на кут a=90°: N2 = N¢ = N × cos 90o = 10 × 0 = 0 F2 = F¢ = F × sin90o = 50 × 1 = 50 кг З наведеного виходить: рівнодіючі повздовжніх складових сил N1+F1 і N2+F2 , при повороті гіроскопічних пристроїв на кут a=90°, будуть мати постійну однонапрямлену дію, змінену по величині сили. При розгляді поперечних сил (рівняння 7 і 8) потрібно враховувати, що дії гіроскопів передбачаються в парному режимі, в цьому випадку поперечні сили другого гіроскопа спрямовані в протилежний бік, які діють на одній прямій і рівні за ве 2 36021 личиною, відповідно гасяться в системі і не чинять дії на зміщення системи. Наведене вище дає основу вважати, що сили, які діють в системі, обумовлюють однонапрямлене зміщення останньої. Особливістю гіровібраційного рушія є його властивість, знаходячись в стані автономної, ізо льованої матеріальної системи, наприклад, в умовах невагомості, за рахунок дії внутрішніх сил системи, за відсутності точки опору і сил протидії, приводити себе в поступальний або в криволінійний рух, а також його закінчувати. Гіровібраційний рушій є механічним саморушійним пристроєм безопорного руху. 3 36021 Фіг. 1 4 36021 Фіг. 2 5 36021 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 6
ДивитисяДодаткова інформація
Назва патенту англійськоюGyro-vibration mover of lengthwise and curvilinear motion
Автори англійськоюZhukovskyi Leonid Mykhailovych
Назва патенту російськоюГировибрационный движитель продольного и криволинейного движения
Автори російськоюЖуковский Леонид Михайлович
МПК / Мітки
МПК: B64G 1/28, G01C 19/00
Мітки: повздовжнього, руху, рушій, гіровібраційний, криволінійного
Код посилання
<a href="https://ua.patents.su/6-36021-girovibracijjnijj-rushijj-povzdovzhnogo-i-krivolinijjnogo-rukhu.html" target="_blank" rel="follow" title="База патентів України">Гіровібраційний рушій повздовжнього і криволінійного руху</a>
Водометний рушій

Номер патенту: 25902
Опубліковано: 26.02.1999
Автор: ЖАН-БЕРНАР ША
МПК: B63H 11/00
Мітки: рушій, водометний
Формула / Реферат:
1. Водометный движитель, содержащий неподвижный статор, нагнетатель в виде ротора с приводом и лопатками, установленный с возможностью вращения вокруг продольной оси, неподвижную торцевую стенку, установленную за нагнетателем соосно с ним, образующую со статором кольцевое сопло с профилированными направляющими поверхностями, формирующими кольцевую струю, и источник газа под давлением, отличающийся тем, что привод нагнетателя размещен за...
Роторно-гвинтовий рушій

Номер патенту: 12583
Опубліковано: 11.10.1999
Автор: Синельник Анатолій Іванович
МПК: B64C 11/00, F01C 1/00
Мітки: рушій, роторно-гвинтовий
Формула / Реферат:
Роторно-гнинтовинй рушій, що містить ведучий вал і ротори, які з'єднані зі втулкою з можливістю вільного обертання відносно осей симетрії роторів і радіально розташовані відносно ведучого валу, який відрізняється тим, що ведучий вал з'єднаний зі втулкою з можливістю вільного обертання відносно втулки, а ротори зв'язані з ведучим валом механічними передачами.
Спосіб реактивного руху
Номер патенту: 12582
Опубліковано: 11.10.1999
Автор: Синельник Анатолій Іванович
Мітки: руху, спосіб, реактивного
Формула / Реферат:
Спосіб реактивного руху з зовнішним робочим тілом, при якому робоче тіло за допомогою рушія всмоктують, здійснюють над ним роботу і відкидають у напрямку, протилежному всмоктуванню, який відрізняється тим, що як зовнішнє робоче тіло застосовують вакуум.
Спосіб безперервного лиття злитків на установках вертикального та криволінійного типу
Номер патенту: 18643
Опубліковано: 25.12.1997
Автори: Рашка Владислав, Марощик Веслав, Шиш Юрій Іванович, Багрій Олександр Іванович, Слиж Йозеф, Рубін Леонід Вікторович, Бродський Сергій Сергійович, Доседел Мирослав, Учитель Лев Михайлович, Зражевський Олександр Данилович, Лобачьов Владислав Тимофійович, Пікус Марк Ісерович, Ірмлер Богдан
МПК: B22D 11/10
Мітки: безперервного, типу, лиття, спосіб, криволінійного, установках, вертикального, злитків
Формула / Реферат:
1. Способ непрерывного литья слитков на установках вертикального и криволинейного типа, включающий подачу жидкого металла струей из промежуточного ковша в кристаллизатор через погружную огнеупорную трубу, пульсационное перемешивание металла в кристаллизаторе периодическим наполнением и вытеснением металла газом из огнеупорной трубы, формирование слитка и его вытягивание из кристаллизатора, отличающийся тем, что вытеснение металла из...
Спосіб визначення стану руху в замкнутій інерціальній системі відліку та пристрій для його здійснення

Номер патенту: 24656
Опубліковано: 04.08.1998
Автор: Годованець Любомир Юрійович
МПК: G01P 3/64
Мітки: системі, стану, відліку, пристрій, замкнутий, здійснення, визначення, спосіб, інерціальній, руху
Формула / Реферат:
1. Спосіб визначення стану руху в замкнутій інерціальній системі відліку, що включає подачу джерелом світла пристрою світлового променя, спрямованого на непрозоре дзеркало, яке відбиває його під прямим кутом відносно до падаючого променя з наступним спостереженням положення променя в окулярі, який відрізняється тим, що в вихідному положенні пристрою, коли напрям світлового променя від джерела світла спрямовано в напрямі вектора швидкості руху...
Попередній патент: Спосіб оцінки стану адаптації організму людини до несприятливих факторів виробничого середовища
Наступний патент: Плита захисного екрана і спосіб її зборки
Випадковий патент: Спосіб дифузійно-конденсаційного отримання конденсату води із атмосферного повітря та дифузійно-конденсаційний пристрій