Пристрій для визначення обертальних похідних моделей в аеродинамічній трубі
Номер патенту: 67661
Опубліковано: 15.06.2004
Автори: Давидов Олександр Рубенович, Іщенко Сергій Олександрович, Жила Володимир Гаврилович

Формула / Реферат
1. Пристрій для визначення обертальних похідних моделей в аеродинамічній трубі, що містить електропривід з муфтою, маховик, кривошипно-шатунний механізм, а також державку з закріпленою на ній моделлю, який відрізняється тим, що державка з'єднана з шатуном через два послідовно з'єднані за допомогою гнучкого зв'язку профільовані шківи.
2. Пристрій за п. 1, який відрізняється тим, що перший шків з'єднаний із шатуном і має кривизну постійного радіуса, а другий шків, розташований нерухомо на осі державки, має кривизну змінного радіуса.
Текст
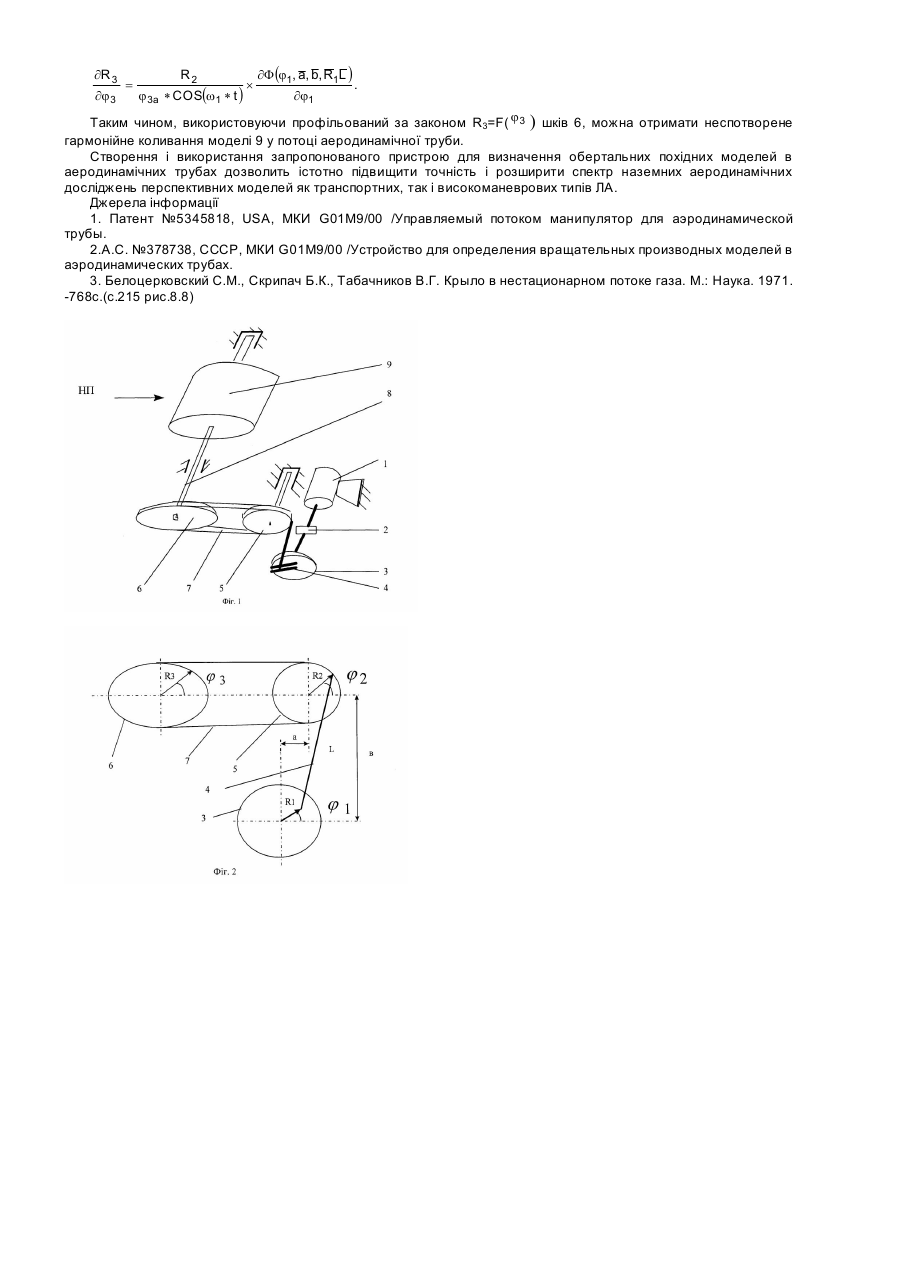
Винахід відноситься до техніки експериментальних досліджень і, зокрема, до пристроїв для визначення нестаціонарних аеродинамічних характеристик моделей літальних апаратів (ЛА) під час випробувань в аеродинамічній трубі. Відомий пристрій для визначення обертальних похідних [1], що містить державку для кріплення моделі в аеродинамічній трубі і систему приводів для її орієнтації щодо потоку і динамічної зміни її положення відносно потоку. Недоліком цього пристрою є недостатній частотний діапазон створюваних вимушених коливань для випробувань високоманеврових ЛА. Найбільш близьким за технічною суттю є пристрій для визначення обертальних похідних [2], що містить електропривід із муфтою, маховик, кривошипно-шатунний механізм, а також державку з закріпленою на ній моделлю. Недоліком цього пристрою є низька точність відтворюваної функції коливань моделі ЛА в потоці. Метод визначення обертальних похідних, реалізований цим пристроєм, дозволяє створення гармонійних коливань на моделі, що знаходиться в потоці [3, с.214-215]. Кривошипно-шатунний механізм на моделі ЛА створює полігармонічне коливання, причому зі збільшенням амплітуди коливань моделі вплив полігармонік збільшується і виділення корисного сигналу, що характеризує першу обертальну похідну, ускладнюється. Іншими словами, зростає зашумленість корисного сигналу і збільшується похибка вимірів у процесі експерименту. В основу винаходу поставлена задача удосконалити пристрій для визначення обертальних похідних моделей в аеродинамічній трубі, у якому шляхом з'єднання державки із шатуном через два послідовно з'єднані за допомогою гнучкого зв'язку профільовані шківи, причому перший шків з'єднаний із шатуном і має кривизну постійного радіуса, а другий шків, розташований нерухомо на осі державки і має кривизну змінного радіуса, які забезпечують моногармонічні коливання моделі ЛА в потоці і за рахунок цього забезпечується підвищення точності експерименту. Поставлена задача вирішується тим, що в пристрої для визначення обертальних похідних моделей в аеродинамічній трубі, що містить електропривід із муфтою, маховик, кривошипно-шатунний механізм, а також державку з закріпленою на ній моделлю, згідно з винаходом державка із шатуном з'єднана через два послідовно з'єднані за допомогою гнучкого зв'язку профільованих шківів. Причому перший шків з'єднаний із шатуном і має кривизну постійного радіуса, а другий шків, розташований нерухомо на осі державки, має кривизну змінного радіуса. На фіг.1 наведена схема пристрою для визначення обертальних похідних моделей в аеродинамічній трубі. На фіг.2 наведена кінематична схема взаємодії шківів і кривошипно-шатунного механізму. Пристрій для визначення обертальних похідних моделей в аеродинамічній трубі складається з електропривода 1 з'єднаного з муфтою 2, маховика 3, кривошипно-шатунного механізму 4, профільованих шківів 5, 6, з'єднаних гнучким зв'язком 7, що забезпечує передачу руху від шківа 5 до шківа 6 без ковзання, державки 8, на який кріпиться модель 9, яка розташована в потоці повітря, що набігає в аеродинамічній трубі (НП). Причому кривошип виконаний разом із маховиком 3 і дозволяє змінювати амплітудне значення кута коливань моделі 9. Пристрій для визначення обертальних похідних моделей в аеродинамічній трубі функціонує в такий спосіб. Електропривід 1 через муфту 2 задає обертання маховику 3, а кривошипно-шатунний механізм 4 перетворює цей рух у коливальний рух шківу 5, що має постійну кривизну, що при будь-якій амплітуді коливань не буде моногармонічним. Коливальний рух за допомогою гнучкого зв'язку 7 передається зі шківа постійної кривизни 5 на шків 6, що має кривизну змінного радіуса, на державку 8, на якій кріпиться модель 9. На моделі 9 відтворюється моногармонічне коливання постійної амплітуди з частотою обертання маховика 3. Муфта 2 призначена для від'єднання маховика 3 від електропривода 1 при досягненні заданої частоти обертання під час оцінювання коефіцієнтів моментів, що демпфують модель ЛА. Принцип перетворення коливального руху на шківах 5, 6 полягає в наступному, фіг.2. Маховик 3 задає кривошипу 4 круговий рух j1 = w1 * t, де w1 - кругова частота обертання маховика 3 і кривошипа 4. Закон зміни руху моделі, одержуваний у прототипі [2] при цьому C B j2 = arc sin arc sin = F j1, a, b, R1, L , A2 + B2 A 2 + B2 де ( ) A = b - sin j1; B = a + cos j1; ( ) 2 é ù 2 2 C = - ê1 + R1 + a + b2 - L2 + 2 a * cos j1 - b * sin j1 ú / 2R1 ; ë û a = a / R1; b = b / R1; L = L / R1; R1 = R1 / R1max ; R1 - регульована довжина кривошипа 4, що задається і визначає амплітуду коливань моделі 9; L - довжина шатуна; а, b - базові розміри взаємного розташування осей обертання маховика 3 і шківа 5; R1max - максимальна довжина кривошипа 4. Очевидно закон зміни руху шківа 5 буде полігармонічним. Необхідно мати гармонійні коливання на досліджуваній моделі 9, як це припускає використовуваний метод робіт, реалізований у таких випробувальних установках [3]. На моделі 9 потрібно мати коливання наступного виду j 3 = j 3a * SIN(w1 * t ) де j 3 a - амплітудне значення гармонійного коливання моделі 9. Для профільованого шківа 6 змінного радіуса кривизни, закон зміни радіуса R3 від кута повороту j 3 визначається розв'язком диференційного рівняння ¶R 3 ¶j 3 = R2 j 3a * COS(w1 * t ) ´ ¶F (j1, a, b, R1L ) ¶j1 . Таким чином, використовуючи профільований за законом R3=F( j 3 ) шків 6, можна отримати неспотворене гармонійне коливання моделі 9 у потоці аеродинамічної труби. Створення і використання запропонованого пристрою для визначення обертальних похідних моделей в аеродинамічних трубах дозволить істотно підвищити точність і розширити спектр наземних аеродинамічних досліджень перспективних моделей як транспортних, так і високоманеврових типів ЛА. Джерела інформації 1. Патент №5345818, USA, МКИ G01М9/00 /Управляемый потоком манипулятор для аэродинамической трубы. 2.А.С. №378738, СССР, МКИ G01М9/00 /Устройство для определения вращательных производных моделей в аэродинамических трубах. 3. Белоцерковский С.М., Скрипач Б.К., Табачников В.Г. Крыло в нестационарном потоке газа. М.: Наука. 1971. -768с.(с.215 рис.8.8)
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for testing a rotating model in a wind tunnel
Автори англійськоюDavydov Oleksandr Rubenovych, Ischenko Serhii Oleksandrovych
Назва патенту російськоюУстройство для исследования вращающейся модели в аэродинамической трубе
Автори російськоюДавыдов Александр Рубенович, Ищенко Сергей Александрович
МПК / Мітки
Мітки: моделей, обертальних, трубі, похідних, аеродинамічний, пристрій, визначення
Код посилання
<a href="https://ua.patents.su/2-67661-pristrijj-dlya-viznachennya-obertalnikh-pokhidnikh-modelejj-v-aerodinamichnijj-trubi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для визначення обертальних похідних моделей в аеродинамічній трубі</a>
Спосіб визначення центральнооклюзіонних взаємовідношень моделей щелепів при проведенні дентальної імплантації
Номер патенту: 22737
Опубліковано: 07.04.1998
Автори: Сєнніков Олег Миколайович, Крикляс Генріх Генадієвич, Коваленко Анатолій Федорович
МПК: A61C 8/00
Мітки: імплантації, спосіб, проведенні, взаємовідношень, щелепів, дентальної, моделей, визначення, центральнооклюзіонних
Формула / Реферат:
1. Способ определения центральноокклюзионных взаимоотношений моделей челюстей при проведении дентальной имплантации, включающей регистрацию и фиксацию моделей челюстей в положении центральной окклюзии, отличающийся тем, что регистрацию центральноокклюзионных рабочих челюстей проводят в лабораторных условиях с использованием предварительно изготовленных в предоперационный период диагностических моделей челюстей, затем изготовляют окклюзионный...
Пристрій для тридименсійного вимірювання моделей щелеп
Номер патенту: 33558
Опубліковано: 15.02.2001
Автори: Сухомлинова Тетяна Ярославівна, Левітов Олександр Миколайович, Рубаненко В'ячеслав Васильович, Бєліков Олександр Борисович
МПК: A61C 3/00
Мітки: тридименсійного, вимірювання, щелеп, пристрій, моделей
Текст:
...поділок; 37 - планка столика; 38 - стопорна шайба; 39 - гвинт; 40 – ноніус; фіг. 2 - основа і столик, вигляд збоку в перерізі, фіг. 3 - основа і столик, вигляд спереду в перерізі А-А, фіг. 4 - столик, вигляд зверху, фіг. 5 - вимірювальний механізм, вигляд спереду та в перерізі. Пристрій для тридименсійного вимірювання моделей щелеп (фіг. 1-5) включає основу 1, закріплену на ній вертикальну стойку 12 з горизонтальним кронштейном 13, в якому...
Спосіб визначення гормонів похідних індолу та їх метаболітів в одній пробі біологічного матеріалу
Номер патенту: 51446
Опубліковано: 15.11.2002
Автори: Косюк Людмила Степанівна, Бєлєнічев Ігор Федорович, Середа Наталія Олександрівна
МПК: G01N 33/50
Мітки: метаболітів, гормонів, проби, визначення, індолу, похідних, матеріалу, біологічного, одний, спосіб
Формула / Реферат:
Спосіб визначення гормонів похідних індолу та їх метаболітів в одній пробі біологічного матеріалу шляхом проведення хроматографічного дослідження, який відрізняється тим, що використовують висхідну тонкошарову хроматографію на силуфолових платівках з підбором системи ( ізопропанол, аміак, вода) та додатково здійснюють спектрофотометричне кількісне визначення похідних індолу та їх метаболітів за формулою:
Спосіб кількісного визначення похідних фенотіозину
Номер патенту: 42338
Опубліковано: 15.10.2001
Автори: Бланк Аврам Борисович, Панталер Револьд Петрович, Гайдук Ольга Василівна
МПК: G01N 21/78, G01N 21/75
Мітки: визначення, похідних, кількісного, фенотіозину, спосіб
Формула / Реферат:
Спосіб кількісного визначення похідних фенотіозину, який вміщує обробку проби, що аналізується, кислотним агентом і розчином ванадату натрію та наступну реєстрацію зміни кольору фотометричним методом, який відрізняється тим, що використовують розчин ванадату натрію з концентрацією 1´10-3-1,5´10-3 моль/л 1 як кислотний агент - розчин сульфосаліцилової кислоти з концентрацією 0,2-0,3 моль/л, який містить первинний ароматичний амін,...
Спосіб агломерації залізних та марганцевих концентратів в обертальних печах
Номер патенту: 48308
Опубліковано: 15.08.2002
Автори: Лубенець Анатолій Миколайович, Варава Володимир Іванович, Княжанський Михайло Маркович, Гайдук Олена Володимирівна, Штукарін Ігор Володимирович
МПК: C22B 1/14
Мітки: спосіб, агломерації, печах, обертальних, концентратів, марганцевих, залізних
Формула / Реферат:
Спосіб агломерації залізних та марганцевих концентратів у обертальних печах, що включає висушування, випалювання та охолодження агломерату, який відрізняється тим, що завантаження концентрату у обертальну піч ведуть в потік продуктів спалювання газа-теплоносія з температурою 1000 - 1200°C.
Попередній патент: Фільтр
Наступний патент: Спосіб просочення капілярно-порозного матеріалу
Випадковий патент: Спосіб одержування зливків