Пристрій для контролю місцезнаходження вагона-ваг
Номер патенту: 69105
Опубліковано: 16.08.2004
Автори: Гарьов Олександр Олексійович, Моргунов Юрій Петрович
Формула / Реферат
Пристрій для контролю місцезнаходження вагона-ваг, який містить привід для пересування візка вагона-ваг, блок кінцевих вимикачів, перетворювач кутових переміщень в електричні сигнали, обчислювальний пристрій і пристрій індикації, який відрізняється тим, що він обладнаний датчиком напрямку руху, а перетворювач кутових переміщень - в електричні сигнали, виконаний у вигляді індуктивного датчика та двох феромагнітних прапорців, жорстко закріплених на валу електродвигуна приводу пересування візка вагона-ваг, при цьому виходи індуктивного датчика, датчика напрямку руху та блока кінцевих вимикачів з'єднані з входами обчислювального пристрою.
Текст
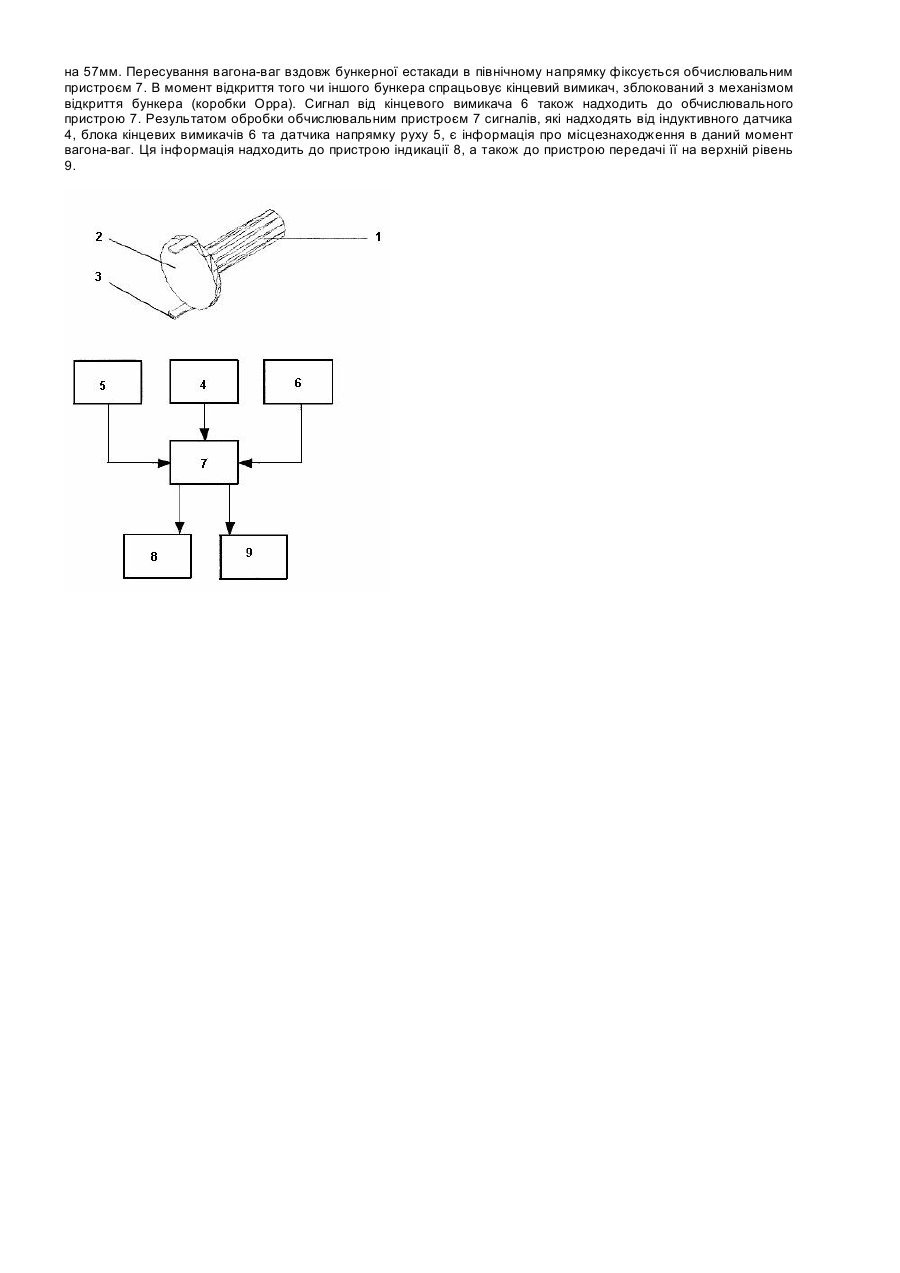
Винахід відноситься до чорної металургії, а саме до пристроїв для контролю місцезнаходження вагона-ваг при виконанні ними операцій по набору рудної частини шихти і транспортуванні її до підйомника доменної печі. Відомий пристрій для контролю місцезнаходження вагона-ваг, який містить в собі привід пересування візка вагона-ваг, кінематично з'єднаний гнучким валом з редуктором, який в свою чергу кінематично з'єднаний з перетворювачем кутових переміщень в електричні сигнали, та блок кінцевих вимикачів (авт. свід. СРСР №376288). Цей пристрій виконано в якості прототипу. Пристрій має той суттєвий недолік, що в ньому використано механічний зв'язок між елементами пристрою, що в важких умовах доменного виробництва (велике запилення та загазування атмосфери, можливість механічних пошкоджень під час завантаження і розвантаження вагона-ваг) знижує експлуатаційну надійність пристрою. В основу винаходу поставлена задача; удосконалити пристрій для контролю місцезнаходження вагона-ваг шляхом заміни механічного зв'язку між елементами пристрою на безконтактний, що значно підвищить експлуатаційну надійність пристрою та його точність. Суть винаходу полягає в тому, що пристрій для контролю місцезнаходження вагона-ваг, який містить в собі привід пересування візка вагона-ваг, блок кінцевих вимикачів, перетворювач кутових переміщень в електричні сигнали, обчислювальний пристрій і пристрій індикації, додатково містить датчик напрямку руху, а перетворювач кутових переміщень в електричні сигнали виконаний у вигляді індуктивного датчика та двох феромагнітних прапорців, жорстко закріплених на валу електродвигуна привода пересування візка вагона-ваг, при цьому виходи індуктивного датчика, датчика напрямку руху та блока кінцевих вимикачів з'єднані зі входами обчислювального пристрою. Загальними з прототипом суттєвими ознаками винаходу є: - привід пересування візка вагона-ваг; - блок кінцевих вимикачів; - перетворювач кутових переміщень в електричні сигнали; - обчислювальний пристрій; - пристрій індикації; Відмінними від прототипу суттєвими ознаками винаходу є: - забезпечення пристрою датчиком напрямку руху; - виконання перетворювача кутових переміщень в електричні сигнали у вигляді індуктивного датчика і двох феромагнітних прапорців, жорстко закріплених на валу електродвигуна привода для пересування візка вагонаваг; - з'єднання виходів індуктивного датчика, датчика напрямку руху і блока кінцевих вимикачів з входами обчислювального пристрою. Перераховані вище суттєві ознаки винаходу є необхідними і достатніми на всі випадки, на які поширюється область застосування винаходу. Між суттєвими ознаками винаходу і технічним результатом - підвищенням експлуатаційної надійності пристрою і точності визначення місцезнаходження вагона-ваг існує причинно-наслідковий зв'язок, який пояснюється наступним чином. Для запобігання затримки в роботі скіпового підйомника тривалість циклу вагонаваг має бути менше тривалості циклу скіпового підйомника. Зменшення цикла вагона-ваг можливо тільки в разі автоматизованого керування вагона-ваг. Одним із необхідних елементів автоматизації є наявність надійного і високоточного пристрою для контролю місцезнаходження вагона-ваг. Ця умова може бути виконана, якщо розірвати механічний зв'язок між приводом візка вагона-ваг і перетворювачем кутових переміщень в електричні сигнали і замінити його на безконтактний; при цьому індуктивний датчик помістити поряд з валом електродвигуна привода переміщення візка вагона-ваг з тим, щоб датчик видавав сигнал з частотою, рівною, як мінімум, частоті обертання вала електродвигуна. При такому розміщенні індуктивного датчика забезпечується контроль місцезнаходження вагона-ваг з точністю до декілька сантиметрів. Для запобігання можливої похибки, пов'язаної зі зміною напрямку руху вагона-ваг, необхідно забезпечити пристрій датчиком напрямку руху. Винахід пояснюється блок-схемою, на якій зображено: 1 - вал електродвигуна привода пересування візка вагона-ваг; 2 - муфта, яка з'єднує вал електродвигуна з редуктором привода пересування візка вагона-ваг; 3 - феромагнітний прапорець, жорстко закріплений на муфті 2 (можливо закріплення прапорців безпосередньо на валу 1); 4 - індуктивний датчик; 5 - датчик напрямку руху; 6 - блок кінцевих вимикачів; 7 - обчислювальний пристрій; 8 - пристрій індикації; 9 - пристрій передачі інформації на верхній рівень. Пристрій працює наступним чином. Вагон-ваги установлюють по осі скіпової ями бункерної естакади. Вісь скіпової ями відповідає початку робочої дільниці. Блок кінцевих вимикачів 6 встановлено на вагон-ваги. Два кінцевих вимикача зблоковані з механізмом відкриття затворів карманів, тому при відкритті затвора спрацьовує відповідний кінцевий вимикач, що відображається на пристрої індикації 8 як початкове положення вагона-ваг. В цьому положенні вагона-ваг виконується перевірка, а при необхідності коректування показу початкового положення. Сигнали від кінцевих вимикачів затворів карманів надходять до обчислювального пристрою 7. При пересуванні вагона-ваг від скіпової ями за одне обертання вала електродвигуна феромагнітні прапорці 3, проходячи поряд з індуктивним датчиком 4, двічі розривають магнітний потік. Сигнали від індуктивного датчика 4 находять до обчислювального пристрою 7, в якому відбувається перетворення кутових переміщень в лінійні. Точність виміру місцезнаходження вагона-ваг достатньо висока. Так, наприклад, в пристрої, реалізованому на ВАТ "Краматорський металургійний завод ім. Куйбишева", сигнали від індуктивного датчика надходять до обчислювального пристрою через кожні півоберта вала електродвигуна, що відповідає пересуванню вагона-ваг на 57мм. Пересування вагона-ваг вздовж бункерної естакади в північному напрямку фіксується обчислювальним пристроєм 7. В момент відкриття того чи іншого бункера спрацьовує кінцевий вимикач, зблокований з механізмом відкриття бункера (коробки Орра). Сигнал від кінцевого вимикача 6 також надходить до обчислювального пристрою 7. Результатом обробки обчислювальним пристроєм 7 сигналів, які надходять від індуктивного датчика 4, блока кінцевих вимикачів 6 та датчика напрямку руху 5, є інформація про місцезнаходження в даний момент вагона-ваг. Ця інформація надходить до пристрою індикації 8, а також до пристрою передачі її на верхній рівень 9.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for detecting the position of a weigh car
Автори англійськоюMorhunov Yurii Petrovych
Назва патенту російськоюУстройство для контроля положения вагона-весов
Автори російськоюМоргунов Юрий Петрович
МПК / Мітки
МПК: B66C 13/00, G01G 19/08, B60P 5/00
Мітки: місцезнаходження, пристрій, вагона-ваг, контролю
Код посилання
<a href="https://ua.patents.su/2-69105-pristrijj-dlya-kontrolyu-misceznakhodzhennya-vagona-vag.html" target="_blank" rel="follow" title="База патентів України">Пристрій для контролю місцезнаходження вагона-ваг</a>
Пристрій контролю місцезнаходження струга та управління приводом стругової установки
Номер патенту: 7687
Опубліковано: 26.12.1995
Автори: Голубчиков Олександр Митрофанович, Муфель Лев Абрамович, Кібрик Ісаак Соломонович, Шапошнік Василь Іванович, Биковський Олександр Павлович
МПК: E21C 27/18
Мітки: місцезнаходження, установки, управління, струга, контролю, приводом, стругової, пристрій
Формула / Реферат:
Устройство контроля местонахождения струга и управления приводом струговой установки, содержащее датчик перемещения струга, соединенный через входной блок с реверсивным счетчиком, ко входам которого подключены, индикатор местонахождения струга и узел задания пределов реверсирования, блок оперативного управления, схему совпадения, блок управления приводом, подключенный к магнитному пускателю электропривода струга, отличающееся тем, что, .с...
Пристрій контролю місцезнаходження рухомих об`єктів
Номер патенту: 16059
Опубліковано: 29.08.1997
Автори: Коваленко Микола Петрович, Тараненко Валерій Олександрович, Довженко Володимир Профирович, Тимошенко Леонід Іванович
МПК: B61L 1/00
Мітки: пристрій, контролю, об'єктів, рухомих, місцезнаходження
Формула / Реферат:
Устройство контроля положения подвижных объектов, содержащее установленные на пути индукционный первичный преобразователь, связанный с приемной катушкой, соединенной через последовательно включенные формирователь импульсов и пороговый элемент с входом одного из ключевых элементов, и исполнительный блок, отличающееся тем, что, с целью повышения достоверности, оно снабжено делителем частоты,1.88входом соединенным через разделительный...
Спосіб вимірювання і контролю місцезнаходження суден
Номер патенту: 33174
Опубліковано: 15.02.2001
Автор: Широков Володимир Михайлович
МПК: G05D 1/02
Мітки: спосіб, вимірювання, суден, контролю, місцезнаходження
Текст:
...якого закладено зображення навігаційної карти,а сполучення зооражень по радіолокаційним орієнтирам виконується за допомогою комп'ютера на екрані дисплею,заоеспечити зоїльшення швидкості,точності , надійності, простоти вимірювань місцезнаходження заоеспечити можливість , коректури навігаційної інформації,автоматичне сполучення зооражень,що надасть можливості оріентировки в умовах оОмежаноі видимості , прй відсутності навігаційної оостановки і...
Спосіб вимірювання і контролю місцезнаходження суден
Номер патенту: 33364
Опубліковано: 15.02.2001
Автор: Широков Володимир Михайлович
МПК: G05D 1/02
Мітки: контролю, вимірювання, місцезнаходження, спосіб, суден
Текст:
...тосування візуального контролю І цілком залежить від професійних І осо бистих якостей судоводія.і це при тому,що плавуча обстановка на наві гаційній карті,деколи,наноситься з точности 100-200 метрів,а на екрані РЛС пологі береги І мілини не відображаються,берегові навігаційні знаки не беруться,а плавучі навігаційні знаки не завжди вдається швидко знайти І опізнати /орієнтири навігаційних карт часто не бувають та-кіши на екрані РІС/.А...
Спосіб дискретного контролю місцезнаходження в лаві виконавчого органу стругу та пристрій для його здійснення
Номер патенту: 7689
Опубліковано: 26.12.1995
Автори: Торубалко Тарас Григорович, Кібрик Ісаак Соломонович, Барданов Валерій Олександрович
МПК: E21C 35/24
Мітки: пристрій, контролю, органу, лави, спосіб, стругу, місцезнаходження, дискретного, виконавчого, здійснення
Формула / Реферат:
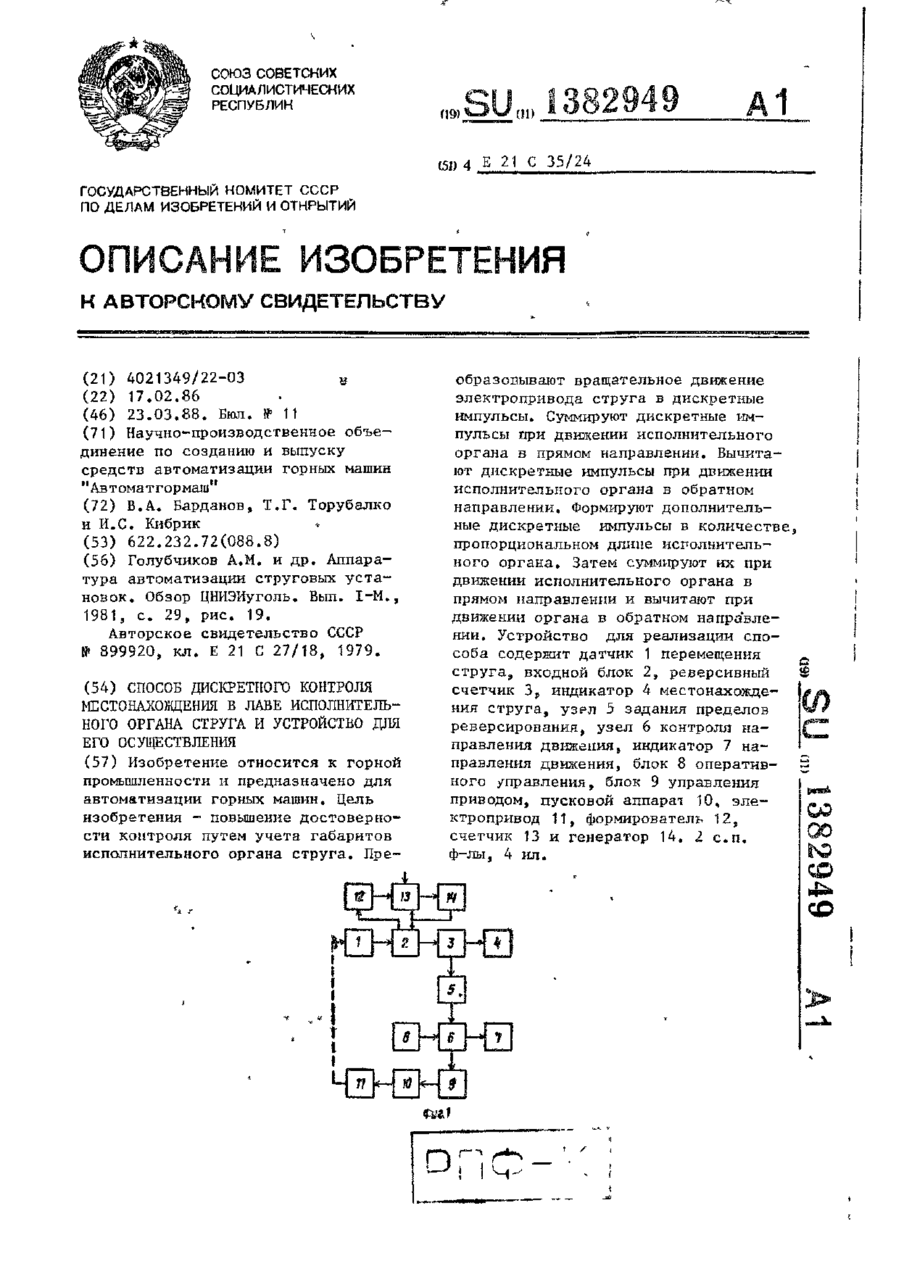
1. Способ дискретного контроля местонахождения в лаве исполнительного органа струга, заключающийся в преобразовании вращательного движения электропривода струга в дискретные импульсы, суммировании дискретных импульсов при движении исполнительного органа в прямом направлении и вычитании дискретных импульсов при движении исполнительного органа в обратном направлении, отличающийся тем, что, с целью повышения достоверности контроля путем...
Попередній патент: Спосіб одержання антигену для діагностики вірусного ентериту гусей в реакції імуноферментного аналізу
Наступний патент: Транспортно-пусковий контейнер ракети
Випадковий патент: Енергетична установка "каскад-2"