Спосіб вимірювання і контролю місцезнаходження суден
Текст
gga МІЖ GOG D 1 101 Спосіб вимірювання І контролю місцезнаходження суден . Застосовується у судовожденні на водному транспорті у праці в сти снутих умовах/в вузкістях,ріках,уздовж берегів І т.І ./,в оОмежанної видимості,при відсутності навігаційної обстановки,при наявності на екрані радіолокаційної станції/далі скорочено РЛС/великих фальшивих ехо-сигналів. Аналогом способу вимірювання І контролю місцезнаходження суден є спосіб вимірювання І контролю місцезнаходження суден,який виконувався за допомогою картовчислювальної приставки - блок сполучення "Пальма*1 до РЛС "Нептун",яка була описана в : Ольшамовский С.Б."Судовождение и правила плавания по внутреним судоходным путям ".Москва.Транспорт.1976р. Сторінка 296.Каманин В.И. "Использование радиолокации для кораблевожде ния".Москва.Воениздат.1960р.Сторінка 128.Спосіб вимірювання І контролю місцезнаходження суден вирішувався шляхом сполучення радіолокаційного зображення,отриманого РЛС,з навігаційною картою по радіолокаційним орі єнтирам за допомогою оптіко-механичного пристрою.Цей пристрій мав у своєму складі РЛС на екран якої виводилось радіолокаційне зображення місцевості.К цьому екрану під кутом 4Ь°розташовувалось полупрозоре дзеркало.Знизу під дзеркалом знаходилась навігаційна карта . Спостерігач бачив в полупрозорому дзеркалі два зображення радіолокаційне з екрану РЛС,яке давало фактичне місцезнаходження судна відносно радіолокацій них орієнтирів І зображення навігаційної карти.Ручним переміщенням цієї карти у вертикальному І горизонтальному напрямках регулювався масштаб І виконувалось сполучення зображень по радіолокаційним орієнтирам , Утворене сполучене зображення давало змогу судоводію визначити місцез находження судна на навігаційній карті,а по рухомим і не рухомим кру гам далини контролювати І виміряти його.хоча спосіб мав відносно велику точність визначення місцезнаходження суден,але не одержав широкого росповоюдження тому,що був заснований на оптТко-мехаяшчному пристрої, який вимогав ручного сполучення масштабу І переміщення навігаційної ка рти за радіолокаційним зображенням.Це вимогало великих витрат часу на проведення вимірів,складності експлуатації,малої надійності.Прототипом способу є СПОСІО вимірювання І контролю місцезнаходження судьн,якии ви конувався за допомогою удосконаленої картосчислювальноі приставки , описанної у розрокі идеського иисшего Инженерного Морського вчилища/рос . ОіШУ/ УДК № 6b6.bi.0b2.b2/b3 № Госрегистраціі OI84Q047I25 "Отчет о научно-исследовательской работе,исследование судоходных трасс и способов Стор.2 проводки судов под мостами реки Дунай в условиях ограниченной вадимос ти'Упромежуточный/.Тема Ш 671.Начальник научно-исследовательского сек тора В.Д.Савчук.Начальник кафедры,руководитель работы к.ф-м.н.профессор Г.Г.Ермолаев.Одеса.19Ь4р.Затвердаана замначальника вчилища по науковій работ! В.А.грехов 11. lid Л 984р. сторінка 7b.Спосіб вимірювання 1 контролю місцезнаходження суден вирішувався шляхом сполучення радіоло каційного з оораження, отриманого гЛС,з переснятим на фотоплівку зобра женням навігаційної карти для зручності сполучення,яка мала радіолока ційне навантаження/радіолокаційну коректуру /.Він вирішувався за допомогою оптіко-механичного пристрою,який мав у своєму складі РЛС на екран якої виводилось радіолокаційне зображення місцевості.К цьому екрану під кутом 45°разташовувалось полупрозоре дзеркало.Знизу рід дзеркалом знаходився фотозбільшуватель для фотоплівки.Спостерігач бачив в по лупрозорому дзеркалі два зображення радіолокаційне з екрану РІС,яке да вало фактичне місцезнаходження судна відносно радіолокаційних орієнти рів І зображення навігаційної карти переснятої на фотоплівку.Зображення навігаційної карти для зручності сполучення по радіолокаційним орі єнтирам ще мало радіолокаційне навантаження/радіолокаційну коректуру /. Сполучення на цьому приладі виконувалось збільшенням чи зменшенням ма сштабу завдяки фотозбІльшуватвлю,а прокручування фотоплівки забеспечу вало прямолінійне переміщення зображення навігаційної карти.Утворене сполучене зображення також давало змогу судоводію визначити місцезна ходження судна на навігаційній карті,а по рухомим І не рухомим кругам далини контролювати І виміряти його.Цей спосіб теж мав відносно велику точність визначення місцезнаходження суден І був більш зручнішим спо сібом сполучення.Але не одержав широкого росповсюдаення тому,що був теж заснований на оптіко-механичному пристрої,який вимогав ручного спо лучення масштабу І переміщення фотоплівки з зображенням навігаційної карти за радіолокаційним зображенням.Це вимогало великих витрат часу на проведення вимірів, складності експлуатації,малоІІ надійності,крім того,ще вимогало великої КІЛЬКОСТІ робіт по ПІДГОТОВЦІ фотоплІвкІ,не ураховувався II швидкий знос,не отпрацьовани бут метода коректури навігаційної Інформації.Таким чином в усіх ціх випадках спосіб вимірювання І контролю місцезнаходження суден шляхом сполучення радіолокаційного зображення з зображенням навігаційної карти по радіолокаційним орі єнтирам здійснювався за допомогою оптіко-механичних пристроїв з ручним сполученням зображень.Тому,при відносно великій точності визначення мі сцезнаходження І не великій вартості вони не одержали широкого роспов сюдаення від складності експлуатації,великих витрат часу на проведення вимірів,малої надійності.І тому,як І досі,на практиці широко рословсю Стор.З джена раділокаційна візуальна проводка.Для усунення недоліків радіоло каційної візуальної проводки І способу вимірювання 1 контролю місцезнаходження суден заснованного на оптіко-механічних пристроях , а також для підвищення надійності вимірів 1 забеспечення автоматизації спрямо вал спосіб вимірювання І контролю місцезнаходження суден шляхом сполу чення радіолокаційного зображення з зображенням навігаційної карти по радіолокаційним орієнтирам за допомогою комп'ютера . . В основу винаходу поставлено задачу вимірювання І контролю місцезнаходження суден методом сполучення радіолокаційного зображення І зображення навігаційної карти по радіолокаційним орієнтирам на підставі оптіко-механичного пристрою.шляхом зміни цього пристрою на комп'ютер у пам'ять якого закладено зображення навігаційної карти,а сполучення зооражень по радіолокаційним орієнтирам виконується за допомогою комп'ютера на екрані дисплею,заоеспечити зоїльшення швидкості,точності , надійності, простоти вимірювань місцезнаходження заоеспечити можливість , коректури навігаційної інформації,автоматичне сполучення зооражень,що надасть можливості оріентировки в умовах оОмежаноі видимості , прй відсутності навігаційної оостановки і при наявності великих фальдш-вих ехо-сигналів на екрані радіолокаційної станції . Ири плаванні судів в стиснутих умовах І особливо в обмежанной видимо сті велике поширення має радіолокаційна візуальна проводка.Вона засно вана на неперервному візуальному контролі на екрані РЛС за місцезнахо дженням судна відносно радіолокаційних орієнтирів.Спостерігай це міс цезнаходження судоводій візуально зрівнює фактичне знаходження з реко мендованим на навігаційній карті.Метод здобув поширення з простоти І наочності.Але він має низьку точність від застосування візуального контролю І цілком залежить від професійних І особистих якостей судоводія . І це при тому,що плавуча обстановка на навігаційній карті,деколи,нано ситься з точністю І00-И00 метрів,а на екрані РЛС пологі береги І мілини не відображаються,берегові навігаційні знаки не оеруться,а плавучі навігаційні знаки не завжди вдається швидко знайти І опізнати/орієнтири навігаційних карт часто не бувають такими на екрані РЛС /.А відсутність плавучої навігаційної обстановки,в деяких випадках,лишає повністю можливості орієнтуватись.Дуже важко орієнтуватись при наявності на екрані РЛС великого фальшивого ехо-сигналу,наприклад,від своїх штовха емих составів на ріках,так як ці ехо-сигнаяи затіняють береги,мости , гидротехнічні спорУди І навігаційну обстановку.Навіть,використання спе ціальних радіолокаційних карт не виключає візуального контролю фактич ного місцезнаходження за рекомендованим.Для усуненя недоліків радіоло каційної візуальної проводки І відомого раніше способу вимірювання І контролю місцезнаходження суден,заснованого на оптіко-механичному прис Стор.4 трою,спрямован розглянутий у заявці на винахід,спосіб вимірювання І контролю місцезнаходження суден заснований на сполученні радіолокацій ного зображення з зображенням навігаційної карти но радіолокаційним орієнтирам за допомогою комп'ютера у пам'ять якого занесено зображення навігаційної карти.Суть його в тому,що на екрані дисплею комп'ютера виводиться зображення Індікатору приймальника МС разом з служоо-вими ЛІНІЯМИ.це зоораження дає фактичне положення судна відносно радіолокаціших орієнтирів.під це зоораження виводиться на екран дисп лею/оажано у контрасних кольорах / зоораження навігаційної карти з пам'яті комп'ютера.попередньо закладене у пам'ять,наприклад,на дискету /дискети/ скан ута дм пристроєм.за допомогою комп'ютера регулюється його масштаб І здійснюється сполучення по радіолокаційним орієнтирам . Спочатку сполучення зображень можливо здійснювати ручним регулюванням ^ подальше автоматичне може виконувати комп'ютер завдяки спеціально розробленої програми.При цьому , завдяки цій програмі навігаційна карта у пам'яті комп'ютера може коректуватись /і по даннш радіолокаційного зоораження також/.після сполучення на екрані дисплею буде два контрастних зображення - одне радіолокаційне фактичне,а друге ре комендоване на навігаційній карті,початок развертки на радіолокаційному зображенні вкаже на місцезнаходження судна відносно лінії судового руху,сторону відхилення,а по міткам рухомого І нерухомого кругів далини судової РЛС можливо оцінити КІЛЬКІСТЬ відхилення,вимірити II. Значно збільшується точність І швидкість вимірів відносно радіолокаційної візуальної проводки І способу вимірювання І контролю місцезнаходження суден за допомогою оптіко-механичного прилада.Упрощуеться контол ] за навігаційною обстановкою,збільшується швидкість приняття рішень на керування судном судоводіем.Збільшується надійність вимірів,а за до помогою комп'ютера забєспечуеться автоматизація вимірів І можливість коректури навігаційної Інформації.А ще,на такому сполученому зображен ні, наприклад, фактична відсутність плавучої навігаційної обстановки змінюється II "теоретичним розташуванням " І тому тут дуже просто орієн туватись.При нечіткому відображенні цієї обстановки на екрані РІС тут дуже просто опізнати II.А великі фальшиві ехо-сигнали попередньо заті нявіїше береги,мости,гидротехнічні споруди І навігаційні знаки на такому сполучєнному зображенні будуть "заповнені теоретичним зображенням". А це дуже спрощує орІентировку.Б перспективі можливо виробляти записи ціх слолучєнних зображень,наприклад,для ВІДЧОТНОСТІ,разбору аварій,коректури І взаімного обміну Інформацією меж судами.Це додасть нові мож ливості до підвищення безпеки І ефективності праці водного транспорту . Упровадження цього способу у водному транспорті не буде дуже склад Стор.Ь ним I дорогим.на всіх судах вже стоять РЛС.А при подальшому розввдку електроніки,зменшенням II собівартості І поширеним упровадженням на водному транспорті поява комп'ютера на судах неминуча.Тому для здійс нення способу треба буде тільки з'єднати ці прилади у потрібному виг ляді І розробити програму до комп'ютера . Точність визначення місцезнаходження суден цім спосібом залежить від :-наявності крапкових орієнтирів на радіолокацііїному зображенні ; масштабу І достовірності використованої навігаційної карти ; особливостів берегової черти ; -точності сполучення радіолокаціііного зображення з зображенням навіга ційної карти ; З урахуванням цього,обща погрешність визначення місця судна,виражена у мм. шкали Індікатору приймальника РЛС : де:-to*- шгрєшність нанесення крапки на карту/т .к=*О,Умм./ ; -тапогрешність сполучення радіолокаційного зображення І зображення навігаційної карти на дисплеї комп'ютера/т а=^и,Вмм./ ; -ґп^г погрешність встановлення масштабів обох зображень />г^=*0,4мм./ ; -Wltfпогрешність відмітки центру развертки судової Р1С/гг2^=*О,4да./ ; При масштабі радіолокаційного зображення І навігаційної карти 1:3760 /діаметр екрану РЛС 2Ь,Ь см.,шкала далини ЬОО метрів/ обща погрешність склада 4,5 метрів.Яри масштабі радіолокаційного зображення 1 навігаційної карти 1:9023/ діаметр екрану РЛС иь,6 см.,шкала далини ЇЖ) метрів/ ооща погрешність склада 11,7 метрів.Що свідчить о досить великій точно сті визначення місця судна в стиснутих умовах.Найбільш точних результа тів визначення місця суден слід очікувати на ділянках які мають обри вісту І Ізрізану оерегову черту чи штучні берегові споруди/дома,труби , лінії електропередач,мости,оетоніровані стіни,насипі І т.і ./.
ДивитисяДодаткова інформація
Назва патенту англійськоюMeasuring and vessel position control method
Назва патенту російськоюСпособ измерения и контроля местонахождения судов
МПК / Мітки
МПК: G05D 1/02
Мітки: спосіб, місцезнаходження, контролю, суден, вимірювання
Код посилання
<a href="https://ua.patents.su/5-33174-sposib-vimiryuvannya-i-kontrolyu-misceznakhodzhennya-suden.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання і контролю місцезнаходження суден</a>
Спосіб дискретного контролю місцезнаходження в лаві виконавчого органу стругу та пристрій для його здійснення
Номер патенту: 7689
Опубліковано: 26.12.1995
Автори: Торубалко Тарас Григорович, Кібрик Ісаак Соломонович, Барданов Валерій Олександрович
МПК: E21C 35/24
Мітки: органу, лави, дискретного, контролю, місцезнаходження, пристрій, здійснення, виконавчого, стругу, спосіб
Формула / Реферат:
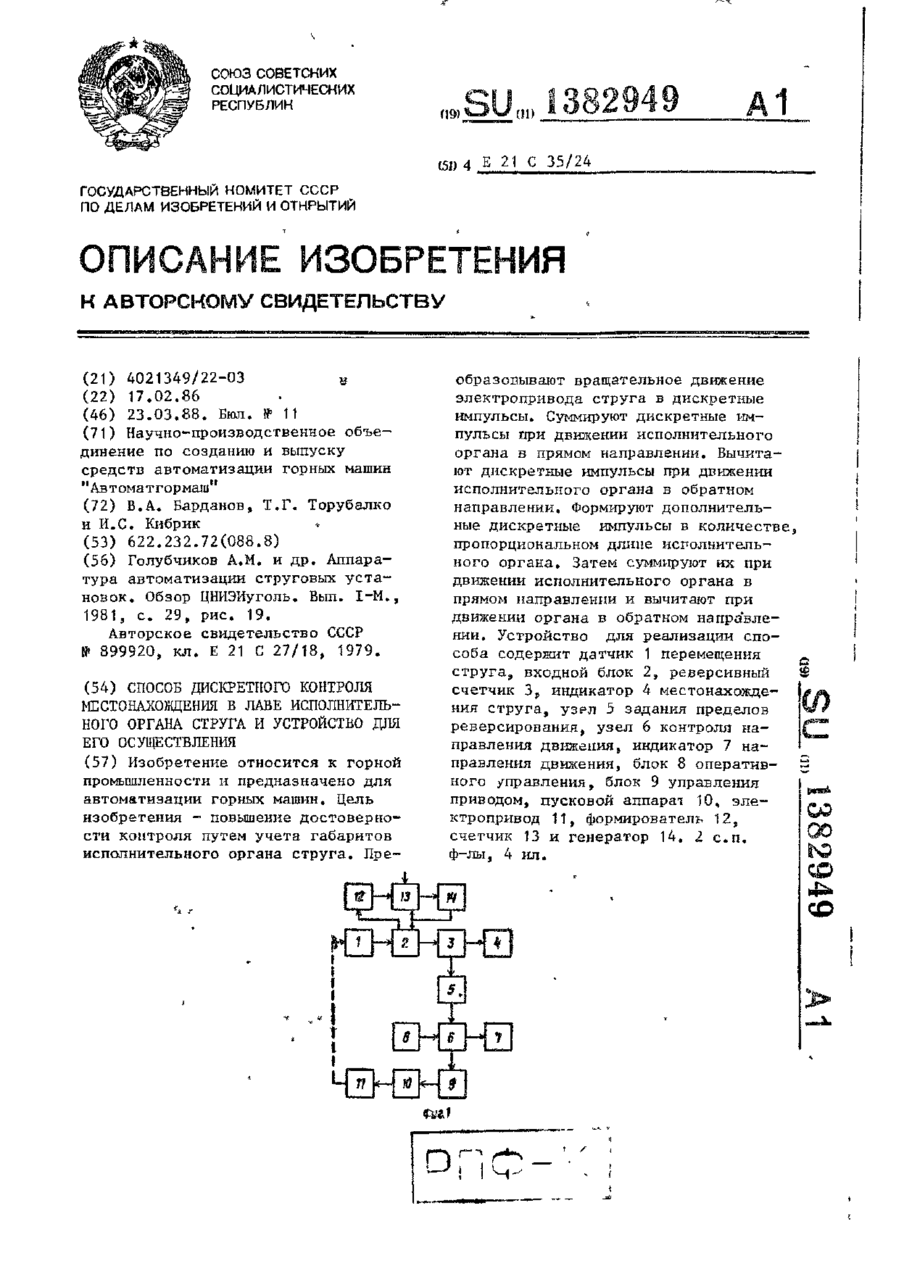
1. Способ дискретного контроля местонахождения в лаве исполнительного органа струга, заключающийся в преобразовании вращательного движения электропривода струга в дискретные импульсы, суммировании дискретных импульсов при движении исполнительного органа в прямом направлении и вычитании дискретных импульсов при движении исполнительного органа в обратном направлении, отличающийся тем, что, с целью повышения достоверности контроля путем...
Пристрій контролю місцезнаходження рухомих об`єктів
Номер патенту: 16059
Опубліковано: 29.08.1997
Автори: Коваленко Микола Петрович, Тараненко Валерій Олександрович, Довженко Володимир Профирович, Тимошенко Леонід Іванович
МПК: B61L 1/00
Мітки: пристрій, рухомих, місцезнаходження, контролю, об'єктів
Формула / Реферат:
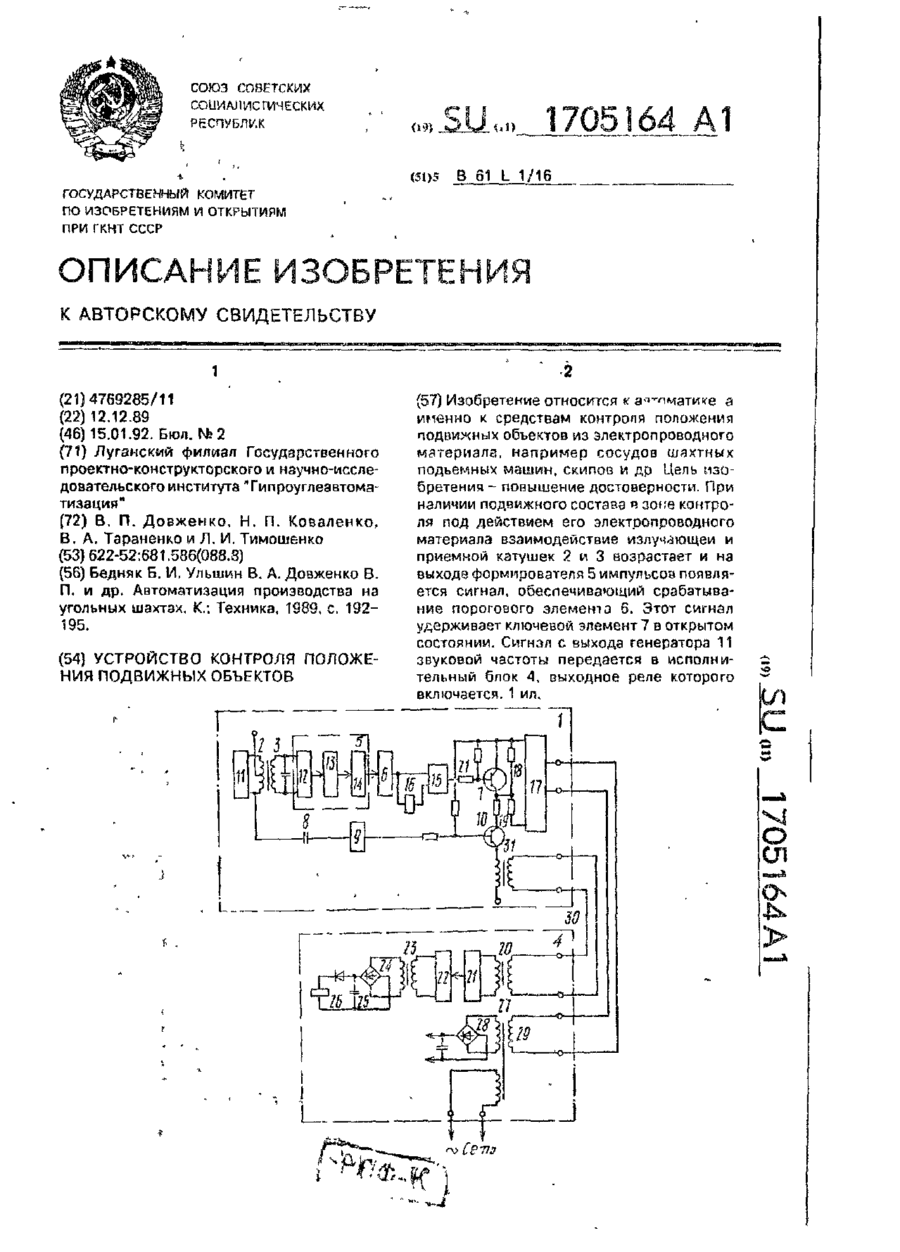
Устройство контроля положения подвижных объектов, содержащее установленные на пути индукционный первичный преобразователь, связанный с приемной катушкой, соединенной через последовательно включенные формирователь импульсов и пороговый элемент с входом одного из ключевых элементов, и исполнительный блок, отличающееся тем, что, с целью повышения достоверности, оно снабжено делителем частоты,1.88входом соединенным через разделительный...
Спосіб вимірювання та контролю внутрішнього діаметра трубок для газорозрядних приладів
Номер патенту: 30363
Опубліковано: 15.11.2000
Автори: Галай Микола Васильович, Лисенко Віктор Григорович, Лубенець Сергій Васильович, Лисенко Григорій Матвійович
МПК: H01J 9/42
Мітки: спосіб, контролю, внутрішнього, газорозрядних, трубок, вимірювання, приладів, діаметра
Формула / Реферат:
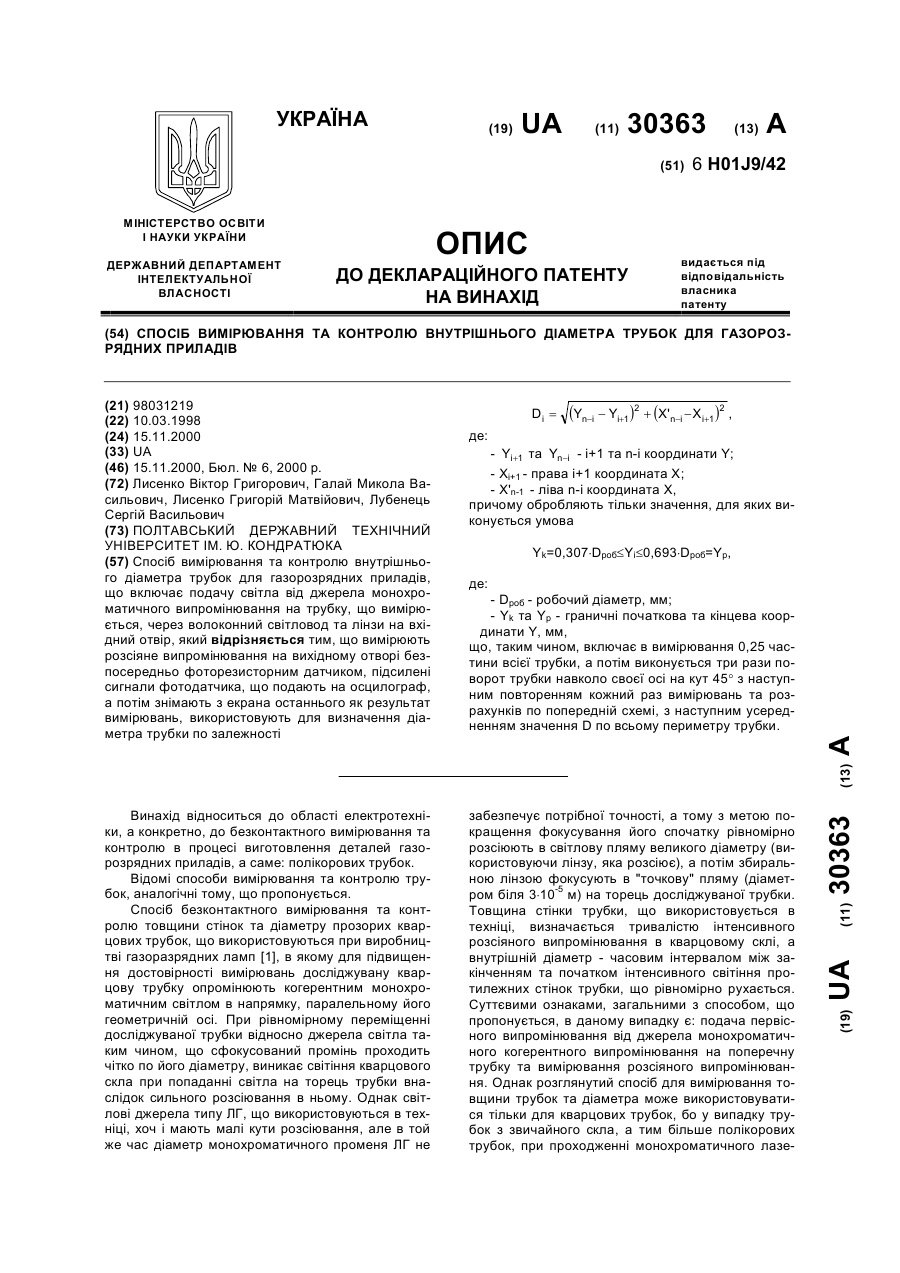
Спосіб вимірювання та контролю внутрішнього діаметра трубок для газорозрядних приладів, що включає подачу світла від джерела монохроматичного випромінювання на трубку, що вимірюється, через волоконний світловод та лінзи на вхідний отвір, який відрізняється тим, що вимірюють розсіяне випромінювання на вихідному отворі безпосередньо фоторезисторним датчиком, підсилені сигнали фотодатчика, що подають на осцилограф, а потім знімають з екрана...
Пристрій контролю місцезнаходження струга та управління приводом стругової установки
Номер патенту: 7687
Опубліковано: 26.12.1995
Автори: Шапошнік Василь Іванович, Биковський Олександр Павлович, Голубчиков Олександр Митрофанович, Кібрик Ісаак Соломонович, Муфель Лев Абрамович
МПК: E21C 27/18
Мітки: управління, місцезнаходження, установки, контролю, приводом, стругової, пристрій, струга
Формула / Реферат:
Устройство контроля местонахождения струга и управления приводом струговой установки, содержащее датчик перемещения струга, соединенный через входной блок с реверсивным счетчиком, ко входам которого подключены, индикатор местонахождения струга и узел задания пределов реверсирования, блок оперативного управления, схему совпадения, блок управления приводом, подключенный к магнитному пускателю электропривода струга, отличающееся тем, что, .с...
Спосіб установлення пристрою для вимірювання сили у системі контролю натягу армоканатів захисних оболонок енергоблоків атомних електростанцій
Номер патенту: 31322
Опубліковано: 15.12.2000
Автори: Абарбарчук Ігор Азарович, Браз Вадим Давидович, Орлов Валерій Олександрович, Нікітінський Михайло Павлович
Мітки: контролю, захисних, системі, армоканатів, сили, оболонок, установлення, енергоблоків, атомних, вимірювання, натягу, спосіб, електростанцій, пристрою
Текст:
..., які зв'язані з особливістю конструкції основи , силоутворюючого пристрою (домкратя) та вузла силовведення, які дозволяють здійснити вбудову пристрою у систему армоканатів у похилому положенні , а також в особливості його монтажу та демонтажу на гільзі армоканата,яка за безпечує надійність та необхідну точність вимірювання натягу кож ного армокаката. Порівняльний аналіз технічного рішення, що заявляється з Іншими, відомими Із...
Попередній патент: Пристрій для подання світлових сигналів
Наступний патент: Спосіб отримання високодисперсних порошків з рослинної сировини
Випадковий патент: Система електростартерного пуску двигуна внутрішнього згорання