Слідкуючий електрогідравлічний привід
Номер патенту: 69128
Опубліковано: 16.08.2004
Автори: Фірсов Сергій Миколайович, Гісцова Тетяна Іванівна, Нарожний Віталій Васильович, Кулік Анатолій Степанович, Лученко Олег Олексійович
Формула / Реферат
Слідкуючий електрогідравлічний привід, що складається з гідравлічно з'єднаних реверсивно регульованого насоса і виконавчого гідроциліндра з датчиком положення його штока, підключеним через суматори до механізму керування кутом повороту регулюючого органа, допоміжного насоса, датчика кута повороту, бака і клапанів підживлення, привідного електродвигуна реверсивно регульованого насоса, датчика сили споживаного струму і обмежника-формувача, який відрізняється тим, що привідний електродвигун оснащений датчиком температури, котрий через перетворювач з'єднаний з керуючим входом корегувального формувача, а вихід обмежника-формувача через корегувальний формувач послідовно з'єднаний зі входом другого суматора.
Текст
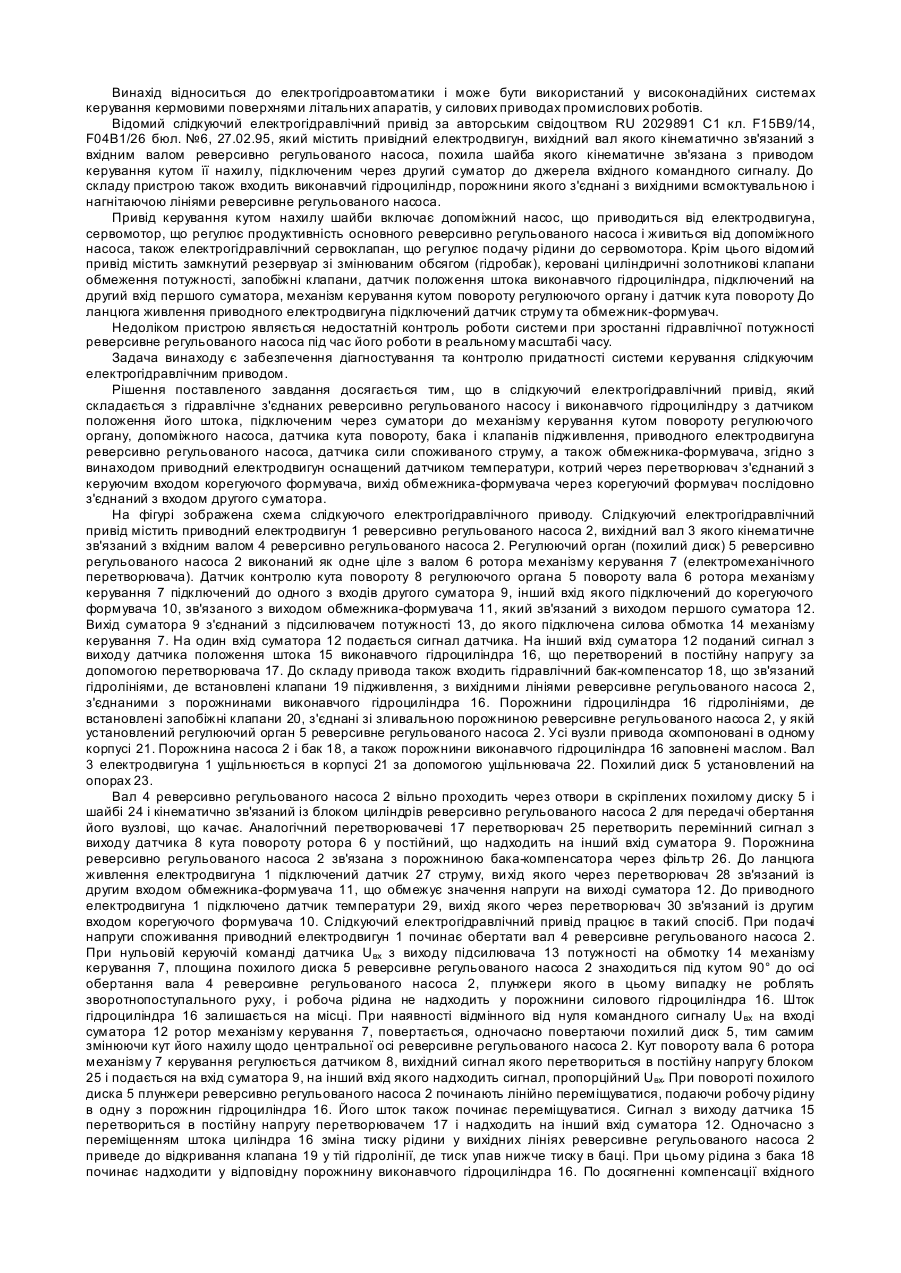
Винахід відноситься до електрогідроавтоматики і може бути використаний у високонадійних системах керування кермовими поверхнями літальних апаратів, у силових приводах промислових роботів. Відомий слідкуючий електрогідравлічний привід за авторським свідоцтвом RU 2029891 С1 кл. F15В9/14, F04В1/26 бюл. №6, 27.02.95, який містить привідний електродвигун, вихідний вал якого кінематично зв'язаний з вхідним валом реверсивно регульованого насоса, похила шайба якого кінематичне зв'язана з приводом керування кутом її нахилу, підключеним через другий суматор до джерела вхідного командного сигналу. До складу пристрою також входить виконавчий гідроциліндр, порожнини якого з'єднані з вихідними всмоктувальною і нагнітаючою лініями реверсивне регульованого насоса. Привід керування кутом нахилу шайби включає допоміжний насос, що приводиться від електродвигуна, сервомотор, що регулює продуктивність основного реверсивно регульованого насоса і живиться від допоміжного насоса, також електрогідравлічний сервоклапан, що регулює подачу рідини до сервомотора. Крім цього відомий привід містить замкнутий резервуар зі змінюваним обсягом (гідробак), керовані циліндричні золотникові клапани обмеження потужності, запобіжні клапани, датчик положення штока виконавчого гідроциліндра, підключений на другий вхід першого суматора, механізм керування кутом повороту регулюючого органу і датчик кута повороту До ланцюга живлення приводного електродвигуна підключений датчик струму та обмежник-формувач. Недоліком пристрою являється недостатній контроль роботи системи при зростанні гідравлічної потужності реверсивне регульованого насоса під час його роботи в реальному масштабі часу. Задача винаходу є забезпечення діагностування та контролю придатності системи керування слідкуючим електрогідравлічним приводом. Рішення поставленого завдання досягається тим, що в слідкуючий електрогідравлічний привід, який складається з гідравлічне з'єднаних реверсивно регульованого насосу і виконавчого гідроциліндру з датчиком положення його штока, підключеним через суматори до механізму керування кутом повороту регулюючого органу, допоміжного насоса, датчика кута повороту, бака і клапанів підживлення, приводного електродвигуна реверсивно регульованого насоса, датчика сили споживаного струму, а також обмежника-формувача, згідно з винаходом приводний електродвигун оснащений датчиком температури, котрий через перетворювач з'єднаний з керуючим входом корегуючого формувача, вихід обмежника-формувача через корегуючий формувач послідовно з'єднаний з входом другого суматора. На фігурі зображена схема слідкуючого електрогідравлічного приводу. Слідкуючий електрогідравлічний привід містить приводний електродвигун 1 реверсивно регульованого насоса 2, вихідний вал 3 якого кінематичне зв'язаний з вхідним валом 4 реверсивно регульованого насоса 2. Регулюючий орган (похилий диск) 5 реверсивно регульованого насоса 2 виконаний як одне ціле з валом 6 ротора механізму керування 7 (електромеханічного перетворювача). Датчик контролю кута повороту 8 регулюючого органа 5 повороту вала 6 ротора механізму керування 7 підключений до одного з входів другого суматора 9, інший вхід якого підключений до корегуючого формувача 10, зв'язаного з виходом обмежника-формувача 11, який зв'язаний з виходом першого суматора 12. Вихід суматора 9 з'єднаний з підсилювачем потужності 13, до якого підключена силова обмотка 14 механізму керування 7. На один вхід суматора 12 подається сигнал датчика. На інший вхід суматора 12 поданий сигнал з виходу датчика положення штока 15 виконавчого гідроциліндра 16, що перетворений в постійну напругу за допомогою перетворювача 17. До складу привода також входить гідравлічний бак-компенсатор 18, що зв'язаний гідролініями, де встановлені клапани 19 підживлення, з вихідними лініями реверсивне регульованого насоса 2, з'єднаними з порожнинами виконавчого гідроциліндра 16. Порожнини гідроциліндра 16 гідролініями, де встановлені запобіжні клапани 20, з'єднані зі зливальною порожниною реверсивне регульованого насоса 2, у якій установлений регулюючий орган 5 реверсивне регульованого насоса 2. Усі вузли привода скомпоновані в одному корпусі 21. Порожнина насоса 2 і бак 18, а також порожнини виконавчого гідроциліндра 16 заповнені маслом. Вал 3 електродвигуна 1 ущільнюється в корпусі 21 за допомогою ущільнювача 22. Похилий диск 5 установлений на опорах 23. Вал 4 реверсивно регульованого насоса 2 вільно проходить через отвори в скріплених похилому диску 5 і шайбі 24 і кінематично зв'язаний із блоком циліндрів реверсивно регульованого насоса 2 для передачі обертання його вузлові, що качає. Аналогічний перетворювачеві 17 перетворювач 25 перетворить перемінний сигнал з виходу датчика 8 кута повороту ротора 6 у постійний, що надходить на інший вхід суматора 9. Порожнина реверсивно регульованого насоса 2 зв'язана з порожниною бака-компенсатора через фільтр 26. До ланцюга живлення електродвигуна 1 підключений датчик 27 струму, ви хід якого через перетворювач 28 зв'язаний із другим входом обмежника-формувача 11, що обмежує значення напруги на виході суматора 12. До приводного електродвигуна 1 підключено датчик температури 29, вихід якого через перетворювач 30 зв'язаний із другим входом корегуючого формувача 10. Слідкуючий електрогідравлічний привід працює в такий спосіб. При подачі напруги споживання приводний електродвигун 1 починає обертати вал 4 реверсивне регульованого насоса 2. При нульовій керуючій команді датчика Uвх з виходу підсилювача 13 потужності на обмотку 14 механізму керування 7, площина похилого диска 5 реверсивне регульованого насоса 2 знаходиться під кутом 90° до осі обертання вала 4 реверсивне регульованого насоса 2, плунжери якого в цьому випадку не роблять зворотнопоступального руху, і робоча рідина не надходить у порожнини силового гідроциліндра 16. Шток гідроциліндра 16 залишається на місці. При наявності відмінного від нуля командного сигналу U вх на вході суматора 12 ротор механізму керування 7, повертається, одночасно повертаючи похилий диск 5, тим самим змінюючи кут його нахилу щодо центральної осі реверсивне регульованого насоса 2. Кут повороту вала 6 ротора механізму 7 керування регулюється датчиком 8, вихідний сигнал якого перетвориться в постійну напругу блоком 25 і подається на вхід суматора 9, на інший вхід якого надходить сигнал, пропорційний Uвх. При повороті похилого диска 5 плунжери реверсивно регульованого насоса 2 починають лінійно переміщуватися, подаючи робочу рідину в одну з порожнин гідроциліндра 16. Його шток також починає переміщуватися. Сигнал з виходу датчика 15 перетвориться в постійну напругу перетворювачем 17 і надходить на інший вхід суматора 12. Одночасно з переміщенням штока циліндра 16 зміна тиску рідини у вихідних лініях реверсивне регульованого насоса 2 приведе до відкривання клапана 19 у тій гідролінії, де тиск упав нижче тиску в баці. При цьому рідина з бака 18 починає надходити у відповідну порожнину виконавчого гідроциліндра 16. По досягненні компенсації вхідного сигналу Uвх сигналом з виходу датчика 15 положення штока гідроциліндра зупиниться, тому що сигнали неузгодженості на виходах першого 12 і другого 9 суматорів будуть дорівнювати нулю. При цьому тиск у вихідних гідролініях реверсивно регульованого насоса 2 відновиться до первісного і клапан 19 закриється. При зміні полярності Uвх на вході першого суматора 12 шток виконавчого гідроциліндра 16 буде рухатися в протилежну сторону. При зростанні гідравлічної потужності реверсивно регульованого насоса, обумовленою швидкістю штока гідроциліндра і навантаженням на ньому, а отже, і зростанні споживаного електродвигуном струму вище деякої величини, перетворювач 28 починає видавати сигнал, пропорційний споживаному току. Цей сигнал надходить в обмежник-формувач 11 де віднімається з вхідного сигналу, зменшуючи сигнал, що надходить на суматор 9 і на підсилювач 13. що приводить до зменшення кута нахилу похилого диска 5. Зі зменшенням кута нахилу падає швидкість штока гідроциліндра 16 і знижується споживана потужність. Таким чином, відбувається обмеження споживаної потужності на рівні, що не перевищує розрахунковий. З появою на штоку гідроциліндра протидіючого зовнішнього навантаження, рівної по величині гальмовому зусиллю (швидкість штока дорівнює 0), спрацьовує один із запобіжних клапанів 20 і зв'язує порожнина високого тиску гідроциліндра зі зливальною порожниною низького тиску реверсивно регульованого насоса 2, де знаходиться похилий диск 5. Струм в обмотках приводного електродвигуна 1 росте, датчик 27 струму видає сигнал на обмежник-формувач 11, що обмежує сигнал керування на вході другого суматора 9 і відповідно зменшує к ут повороту похилого диска 5 і, отже, продуктивність реверсивне регульованого насоса 2 на рівні, що відповідає розрахунковій споживаній електродвигуном потужності. При зростанні струму температура обмоток електродвигуна 1 підвищується, а отже погіршується контроль роботи системи по струму. Для цього вводиться датчик температури 29, сигнал з якого призростанні гідравлічної потужності реверсивне регульованого насоса пропорційно зміні температури двигуна через перетворювач 30 подається на корегуючий формувач 10, який обмежує сигнал керування на вході другого суматора 9 і обмежує рівень споживаної потужності. Таким чином, введення у пристрій датчика температури 29, перетворювача 30 та корегуючого формувача 10 дозволяє під час роботи приводу більш ефективно діагностувати та корегувати роботу привода.
ДивитисяДодаткова інформація
Назва патенту англійськоюTracking electro-hydraulic drive
Автори англійськоюKulik Anatolii Stepanovych, Naroznnyi Vitaliy Vasyliovych, Firsov Serhii Mykolaiovych, Luchenko Oleh Oleksiiovych
Назва патенту російськоюСледящий электрогидравлический привод
Автори російськоюКулик Анатолий Степанович, Нарожный Виталий Васильевич, Фирсов Сергей Николаевич, Лученко Олег Алексеевич
МПК / Мітки
МПК: F15B 9/00
Мітки: слідкуючий, електрогідравлічний, привід
Код посилання
<a href="https://ua.patents.su/2-69128-slidkuyuchijj-elektrogidravlichnijj-privid.html" target="_blank" rel="follow" title="База патентів України">Слідкуючий електрогідравлічний привід</a>
Слідкуючий електрогідравлічний привід
Номер патенту: 69233
Опубліковано: 16.08.2004
Автори: Кулік Анатолій Степанович, Нарожний Віталій Васильович, Таран Олександр Миколайович, Фірсов Сергій Миколайович, Лученко Олег Олексійович
МПК: F15B 9/00
Мітки: привід, електрогідравлічний, слідкуючий
Формула / Реферат:
Слідкуючий електрогідравлічний привід, який складається з послідовно з'єднаних задатчика, порівнюючого пристрою, гідропідсилювача і виконавчого гідродвигуна з потенціометром зворотного зв'язку, підключеного через буферний блок фазової корекції до порівнюючого пристрою та схеми корекції, підключеної через перемикаючий пристрій до гідропідсилювача, який відрізняється тим, що до схеми додано блок діагностування потенціометра зворотного зв'язку,...
Електрогідравлічний слідкуючий привід
Номер патенту: 67680
Опубліковано: 15.06.2004
Автори: Лученко Олег Олексійович, Нарожний Віталій Васильович, Фірсов Сергій Миколайович, Биков Анатолій Васильович, Кулік Анатолій Степанович
МПК: F15B 9/00
Мітки: електрогідравлічний, слідкуючий, привід
Формула / Реферат:
Електрогідравлічний слідкуючий привід, який складається з вимірювача неузгодження, блоків множення, підсилювача, приводу регулюючого органу насоса, гідромотора, датчиків температури і тиску рідини в частинах гідромотора, що обертаються, датчика положення, датчика швидкості, датчика перепаду тиску в гідролініях, інтегратора, суматорів, блока поділу, корегувального пристрою, нелінійних блоків і релейного елемента, який відрізняється тим, що в...
Електрогідравлічний слідкуючий привод
Номер патенту: 5062
Опубліковано: 28.12.1994
Автор: Пономаренко Анатолій Олександрович
МПК: F15B 9/00
Мітки: електрогідравлічний, привод, слідкуючий
Формула / Реферат:
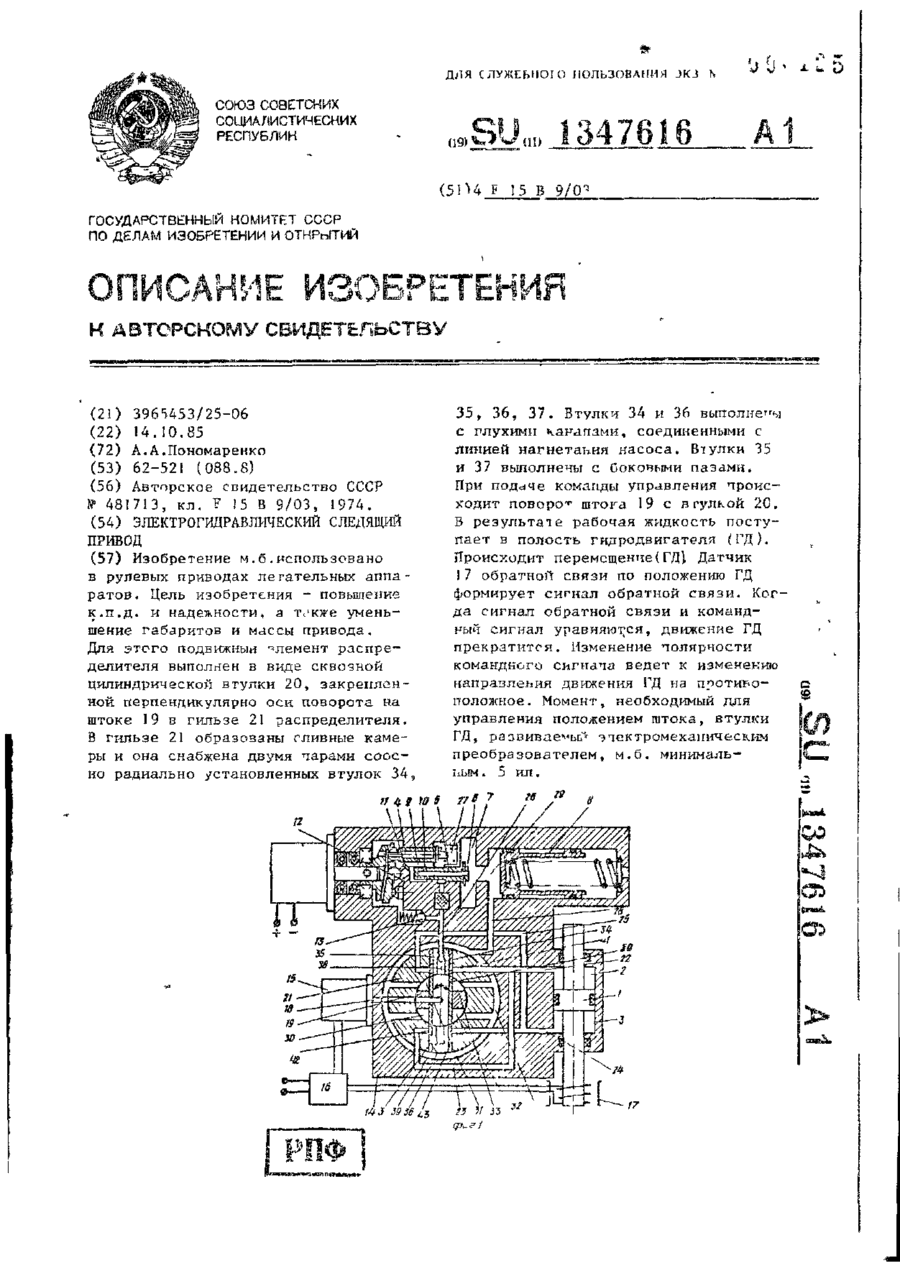
Электрогидравлический следящий привод, содержащий исполнительный гидродвигатель, насос регулируемой производительности и электрогидравлический усилитель, электромеханический преобразователь которого электрически связан с задатчиком и датчиком обратной связи исполнительного гидродвигателя и кинематически связан поворотным валом со штоком подвижного элемента распределителя, каналы гильзы которого подключены к линии нагнетания насоса, сливу...
Електрогідравлічний слідкуючий привод
Номер патенту: 5700
Опубліковано: 28.12.1994
Автори: Калінін Борис Петрович, Гапон Олександр Васильович, Канюк Генадій Іванович, Пакулов Костянтин Миколайович
МПК: F15B 9/00
Мітки: привод, слідкуючий, електрогідравлічний
Формула / Реферат:
(57) Электрогидравлический следящий привод, содержащий последовательно соединенные задающий блок, сумматор, электронный усилитель, электрогидравлический усилитель, подключенный к исполнительному гидромеханизму, и датчик положения последнего, а также цепь отрицательной обратной связи по положению, включающую корректирующий блок для компенсации погрешности, вход которого соединен с датчиком положения, а выход - с сумматором, отличающийся тем,...
Слідкуючий привід подачі металорізального верстата з компенсацією похибок напрямних
Номер патенту: 63306
Опубліковано: 15.01.2004
Автори: Мельник Максим Сергійович, Бабін Олег Фавієвич, Владимиров Анатолій Юрієвич, Ковальов Віктор Дмитрович
МПК: G05D 3/12
Мітки: верстата, компенсацією, подачі, похибок, металорізального, привід, слідкуючий, напрямних
Формула / Реферат:
Слідкуючий привід подачі металорізального верстата з компенсацією похибок напрямних, що містить рухомий вузол, розташований на напрямних поперечного переміщення, які розташовані на напрямних повздовжнього переміщення, електродвигун поперечної подачі , зв'язаний механічно з рухомим вузлом, імпульсний дискретний датчик, електронний цифровий реверсивний лічильник, вхід якого зв'язаний з імпульсним дискретним датчиком, задавальний пристрій,...
Попередній патент: Пристрій адаптивної компенсації активних шумових завад
Наступний патент: Комбінаторний процесор
Випадковий патент: Спосіб отримання содової солом'яної напівцелюлози