Пристрій адаптивної компенсації активних шумових завад
Формула / Реферат
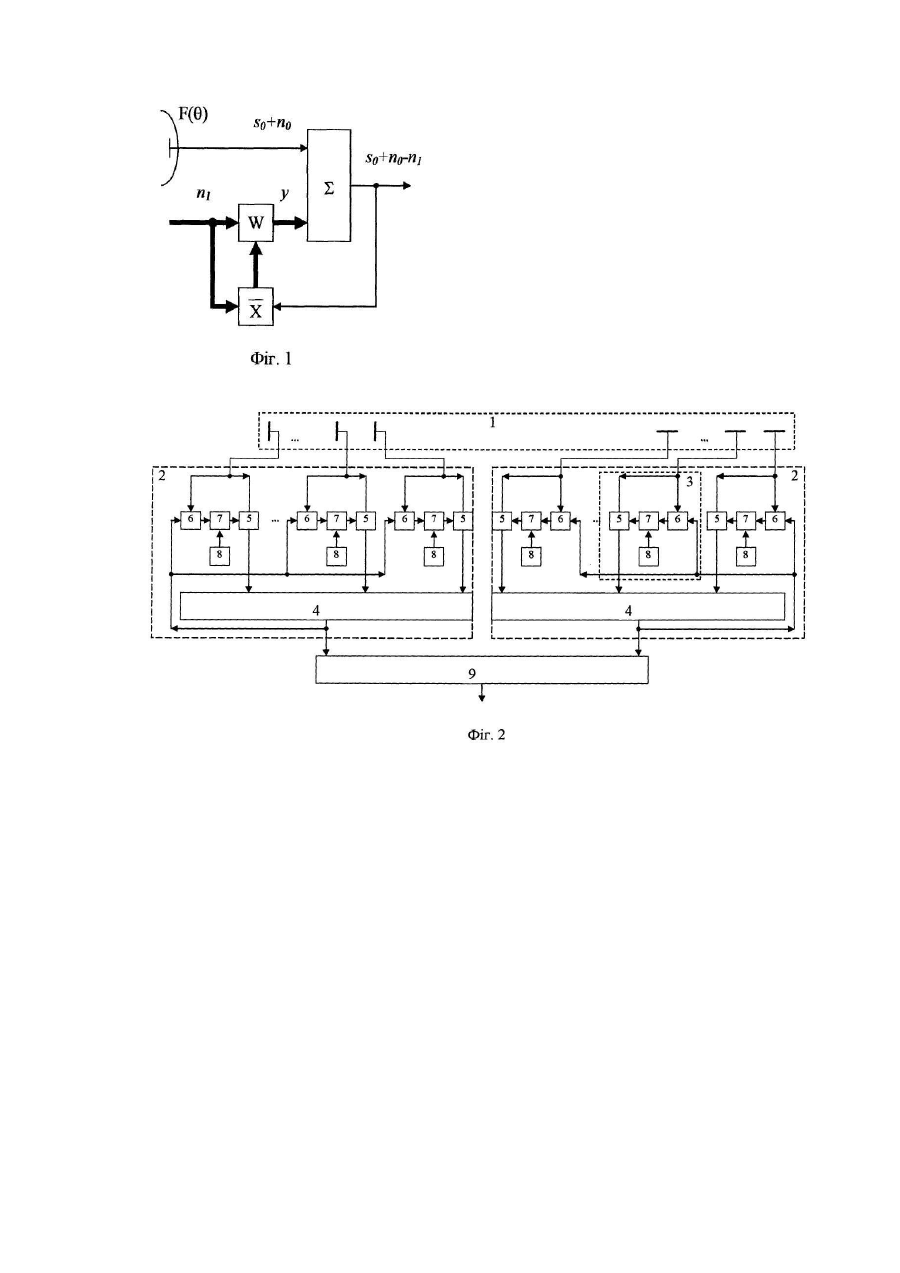
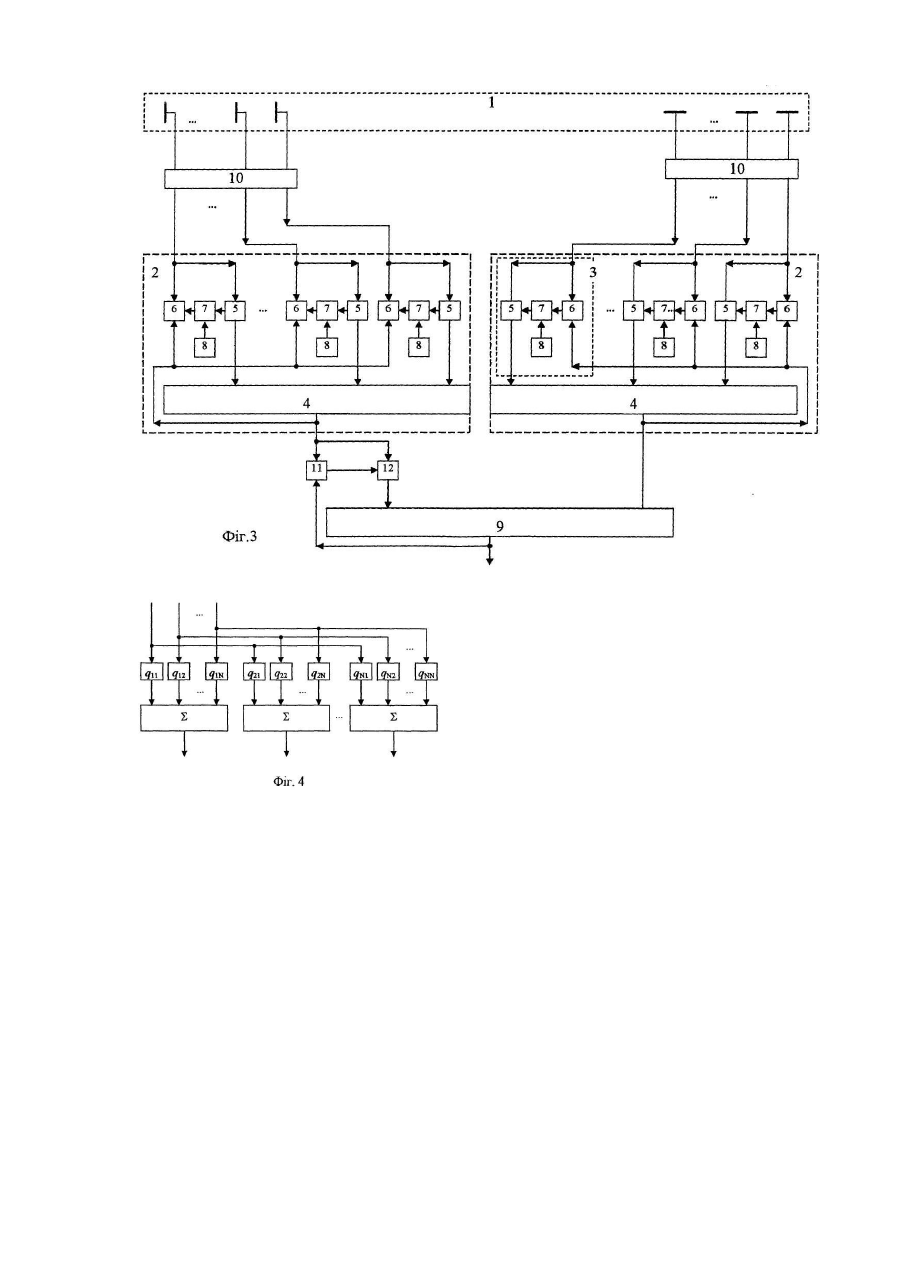
Пристрій адаптивної компенсації активних шумових завад, що включає антенну систему, яка містить 2N антенних елементів з взаємно ортогональною поляризацією, два канали, один з яких зв'язаний з антенними елементами вертикальної поляризації, а другий - з елементами горизонтальної поляризації, канали розділені на N підканалів, кожний з яких містить ваговий підсилювач, вхід якого підключений до виходу антенного елементу і до входу корелятора, а вихід - до входу канального суматора, вихід якого сполучений з другим входом корелятора, вихід корелятора через суматор кола кореляційного зворотного зв'язку підключений до входу вагового підсилювача, вхід суматора кола кореляційного зворотного зв'язку з`єднаний з виходом формувача еталонної напруги, а виходи канальних суматорів з'єднані загальним суматором пристрою, який відрізняється тим, що кожний канал забезпечений формувачем діаграми спрямованості підканалів, встановленим між виходами антенних елементів і входами підканалів, а між виходом канального суматора одного з каналів і відповідним входом загального суматора пристрою підключений додатковий ваговий підсилювач, вхід якого підключений до додаткового корелятора, другий вхід якого підключений до виходу пристрою, а вихід - до другого входу додаткового вагового підсилювача.
Текст
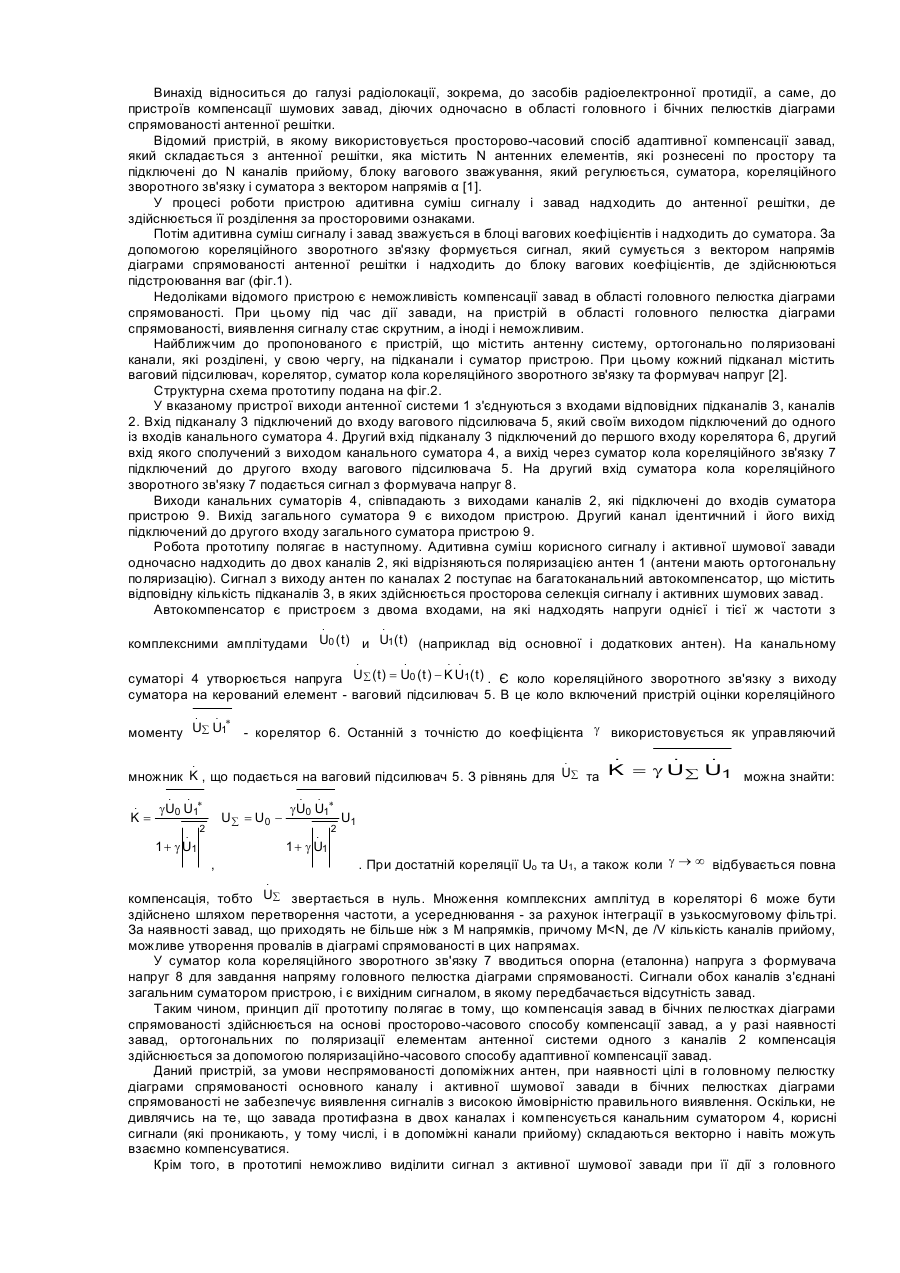
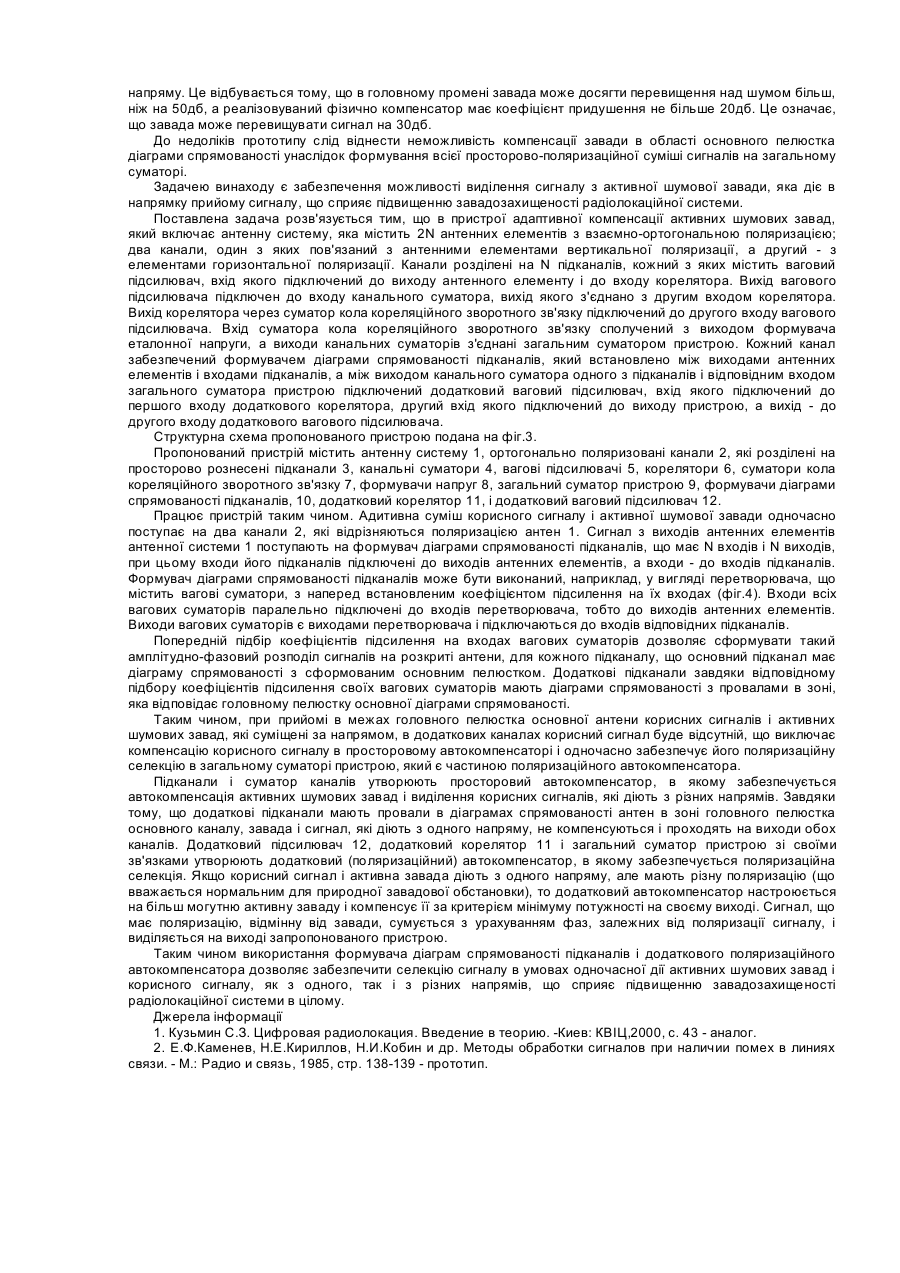
Винахід відноситься до галузі радіолокації, зокрема, до засобів радіоелектронної протидії, а саме, до пристроїв компенсації шумових завад, діючих одночасно в області головного і бічних пелюстків діаграми спрямованості антенної решітки. Відомий пристрій, в якому використовується просторово-часовий спосіб адаптивної компенсації завад, який складається з антенної решітки, яка містить N антенних елементів, які рознесені по простору та підключені до N каналів прийому, блоку вагового зважування, який регулюється, суматора, кореляційного зворотного зв'язку і суматора з вектором напрямів α [1]. У процесі роботи пристрою адитивна суміш сигналу і завад надходить до антенної решітки, де здійснюється її розділення за просторовими ознаками. Потім адитивна суміш сигналу і завад зважується в блоці вагових коефіцієнтів і надходить до суматора. За допомогою кореляційного зворотного зв'язку формується сигнал, який сумується з вектором напрямів діаграми спрямованості антенної решітки і надходить до блоку вагових коефіцієнтів, де здійснюються підстроювання ваг (фіг.1). Недоліками відомого пристрою є неможливість компенсації завад в області головного пелюстка діаграми спрямованості. При цьому під час дії завади, на пристрій в області головного пелюстка діаграми спрямованості, виявлення сигналу стає скрутним, а іноді і неможливим. Найближчим до пропонованого є пристрій, що містить антенну систему, ортогонально поляризовані канали, які розділені, у свою чергу, на підканали і суматор пристрою. При цьому кожний підканал містить ваговий підсилювач, корелятор, суматор кола кореляційного зворотного зв'язку та формувач напруг [2]. Структурна схема прототипу подана на фіг.2. У вказаному пристрої виходи антенної системи 1 з'єднуються з входами відповідних підканалів 3, каналів 2. Вхід підканалу 3 підключений до входу вагового підсилювача 5, який своїм виходом підключений до одного із входів канального суматора 4. Другий вхід підканалу 3 підключений до першого входу корелятора 6, другий вхід якого сполучений з виходом канального суматора 4, а вихід через суматор кола кореляційного зв'язку 7 підключений до другого входу вагового підсилювача 5. На другий вхід суматора кола кореляційного зворотного зв'язку 7 подається сигнал з формувача напруг 8. Виходи канальних суматорів 4, співпадають з виходами каналів 2, які підключені до входів суматора пристрою 9. Вихід загального суматора 9 є виходом пристрою. Другий канал ідентичний і його вихід підключений до другого входу загального суматора пристрою 9. Робота прототипу полягає в наступному. Адитивна суміш корисного сигналу і активної шумової завади одночасно надходить до двох каналів 2, які відрізняються поляризацією антен 1 (антени мають ортогональну поляризацію). Сигнал з виходу антен по каналах 2 поступає на багатоканальний автокомпенсатор, що містить відповідну кількість підканалів 3, в яких здійснюється просторова селекція сигналу і активних шумових завад. Автокомпенсатор є пристроєм з двома входами, на які надходять напруги однієї і тієї ж частоти з . . комплексними амплітудами U0 ( t ) и U1( t ) (наприклад від основної і додаткових антен). На канальному . . . . суматорі 4 утворюється напруга Uå ( t ) = U0 ( t ) - K U1( t ) . Є коло кореляційного зворотного зв'язку з виходу суматора на керований елемент - ваговий підсилювач 5. В це коло включений пристрій оцінки кореляційного . . * моменту Uå U1 - корелятор 6. Останній з точністю до коефіцієнта g використовується як управляючий . . . . . множник K , що подається на ваговий підсилювач 5. З рівнянь для Uå та K = g Uå U1 можна знайти: . K= . . . gU0 U1* . Uå = U0 2 . gU0 U1* . 1 + g U1 1 + g U1 , . 2 U1 . При достатній кореляції Uo та U1, а також коли g ® ¥ відбувається повна компенсація, тобто Uå звертається в нуль. Множення комплексних амплітуд в кореляторі 6 може бути здійснено шляхом перетворення частоти, а усереднювання - за рахунок інтеграції в узькосмуговому фільтрі. За наявності завад, що приходять не більше ніж з М напрямків, причому M
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for adaptive compensation of noise interferences
Назва патенту російськоюУстройство для адаптивной компенсации шумовых помех
МПК / Мітки
МПК: G01S 7/36
Мітки: пристрій, адаптивної, активних, шумових, компенсації, завад
Код посилання
<a href="https://ua.patents.su/4-69127-pristrijj-adaptivno-kompensaci-aktivnikh-shumovikh-zavad.html" target="_blank" rel="follow" title="База патентів України">Пристрій адаптивної компенсації активних шумових завад</a>
Пристрій компенсації активних шумових завад
Номер патенту: 37868
Опубліковано: 15.12.2003
Автори: Траілін Вячеслав Федорович, Падалко Віктор Григорович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мокеєв Юрій Геннадійович, Каспирович Олександр Геннадійович, Мирошниченко Михайло Іванович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Лаврентьєв Володимир Миколайович, Немчин Олександр Федорович
МПК: G01S 7/36
Мітки: шумових, пристрій, активних, завад, компенсації
Формула / Реферат:
Пристрій компенсації активних шумових завад, що містить блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок помноження, блок віднімання, причому вихід лінії затримки додаткового каналу сполучений із першим входом блока помноження, вихід якого сполучений із першим входом блока віднімання, другий вхід блока віднімання підключений до виходу лінії затримки основного каналу, а вихід блока...
Пристрій компенсації активних шумових завад
Номер патенту: 38217
Опубліковано: 15.05.2001
Автори: КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Каспирович Олександр Геннадійович, Мирошниченко Михайло Іванович, Мокеєв Юрій Геннадійович, Немчин Олександр Федорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Луханін Михайло Іванович, Попов Олег Якович, Лаврентьєв Володимир Миколайович
МПК: G01S 7/36
Мітки: пристрій, активних, завад, шумових, компенсації
Формула / Реферат:
1. Пристрій компенсації активних шумових завад, що включає блок обчислення вагових коефіцієнтів, лінію затримки основного каналу, лінію затримки додаткового каналу, блок множення, блок віднімання, причому входи лінії затримки основного каналу і лінії затримки додаткового каналу є входами пристрою вихід лінії затримки додаткового каналу сполучений із першим входом блока множення, вихід якого сполучений із входом блока віднімання, перший вхід...
Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 58183
Опубліковано: 15.07.2003
Автори: Часовський Валентин Олександрович, Чорнобородова Наталя Петрівна, Чорнобородов Михайло Петрович
МПК: G01S 7/36
Мітки: цифрова, система, завад, компенсації, несинхронних, імпульсних
Формула / Реферат:
Цифрова система компенсації несинхронних імпульсних завад, що містить запам'ятовуючий пристрій, вхід якого з'єднаний з входом системи і входом блока фазових фільтрів, вхід якого також приєднаний до входу системи, а його вихід приєднаний до його ж входу, блок виявлення та обчислення параметрів несинхронної імпульсної завади, основний вихід якого приєднаний до другого входу суматора, перший вхід якого приєднаний до виходу запам'ятовуючого...
Радіолокатор з пристроєм компенсації активних завад відніманням
Номер патенту: 46937
Опубліковано: 17.06.2002
Автори: Бахвалов Валентин Борисович, Пророшин Сергій Михайлович, Кудрик Андрій Миколайович
МПК: G01S 7/36
Мітки: пристроєм, відніманням, завад, радіолокатор, активних, компенсації
Формула / Реферат:
Радіолокатор з пристроєм компенсації активних завад відніманням, що містить передавач з передавальною антеною, приймальну апертурну антену з круглим хвилеводом, приймач сигналу, пристрій віднімання і індикатор, який відрізняється тим, що до складу радіолокатора додатково включений вимірювач відношення амплітуд і зсуву фаз вертикальної і горизонтальної складових завад, що складається з розташованих у хвилеводі приймальної антени вертикального...
Цифрова система компенсації несинхронних імпульсних завад
Номер патенту: 46625
Опубліковано: 15.05.2002
Автори: Чорнобородов Михайло Петрович, Часовський Валентин Олександрович
МПК: G01S 7/36
Мітки: завад, система, компенсації, імпульсних, цифрова, несинхронних
Формула / Реферат:
Цифрова система компенсації несинхронних імпульсних завад, у якій використовується дворазове перетворення Фур'є для визначення параметрів несинхронної імпульсної завади, що містить запам'ятовуючий пристрій, вхід якого з'єднаний із входом системи, суматор, один із входів якого з'єднаний з виходом запам'ятовуючого пристрою, а вихід з'єднаний з виходом системи, блок фазових фільтрів, вхід якого з'єднаний із входом системи, яка відрізняється тим,...
Попередній патент: Спосіб стабілізації радіального положення осі обертання вала аеростатичної шпиндельної опори
Наступний патент: Слідкуючий електрогідравлічний привід