Електрогідравлічний слідкуючий привід
Номер патенту: 67680
Опубліковано: 15.06.2004
Автори: Биков Анатолій Васильович, Нарожний Віталій Васильович, Фірсов Сергій Миколайович, Лученко Олег Олексійович, Кулік Анатолій Степанович

Формула / Реферат
Електрогідравлічний слідкуючий привід, який складається з вимірювача неузгодження, блоків множення, підсилювача, приводу регулюючого органу насоса, гідромотора, датчиків температури і тиску рідини в частинах гідромотора, що обертаються, датчика положення, датчика швидкості, датчика перепаду тиску в гідролініях, інтегратора, суматорів, блока поділу, корегувального пристрою, нелінійних блоків і релейного елемента, який відрізняється тим, що в нього уведено блок діагностування та контролю, вхід якого з'єднано з валом гідромотора, вихід блока діагностування та контролю приєднано до нагрівального елемента, установленого в робочій зоні гідромотора.
Текст
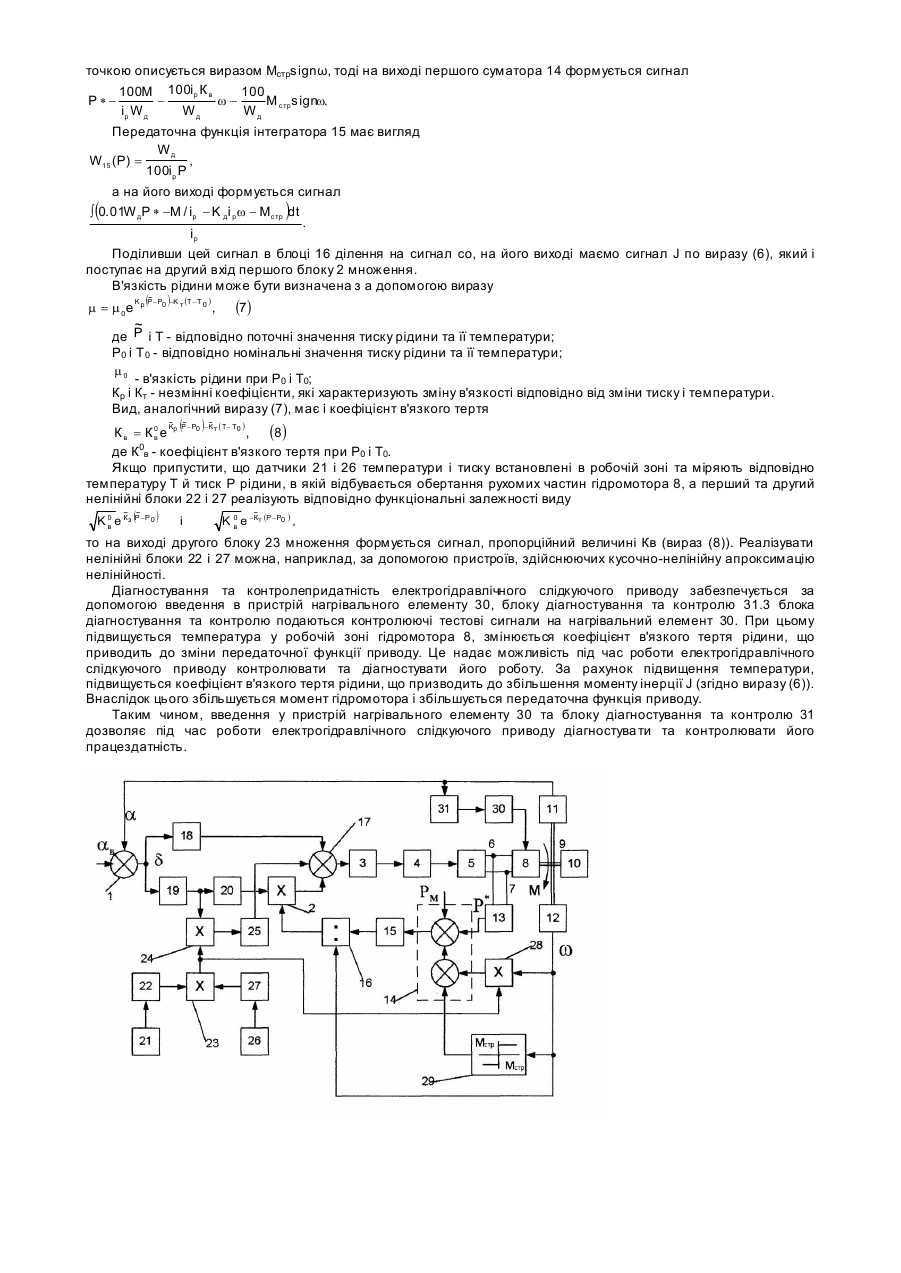
Винахід відноситься до гідроавтоматики може бути використаний в слідкуючих системах станків і промислових роботах. Відомий електрогідравлічний слідкуючий привід за авторським свідоцтвом SU 1399521 А2 кл. F 15 В 15 9/03 бюл. №20,30.05.88, який містить вимірювач неузгодження, підсилювач, привід регулюючого органу насоса, гідромотор, датчики температури і тиску рідини в частинах гідромотора, що обертаються, блоки множення, датчики положення, швидкості, датчик перепаду тиску в гідролініях, релейний елемент, нелінійні блоки, інтегратор, блок поділу, суматори, корегувальний пристрій. Привід інваріантний до перемінного моменту інерції і моменту в'язкого тертя, що підвищує його точність і стійкість в широкому діапазоні їх змін. Але цей електрогідравлічний слідкуючий привід неможливо діагностувати і контролювати під час його роботи в реальному масштабі часу. У зв'язку з цим, виникає необхідність рішення задач діагностування і контролепридатності електрогідравлічного слідкуючого приводу під час його роботи в реальному масштабі часу. Задачею винаходу є забезпечення діагностування та контролепридатності електрогідравлічного слідкуючого приводу. Рішення поставленого завдання досягається тим, що в електрогідравлічний слідкуючий привід, що складається з вимірювача неузгодження, блоків множення, підсилювача, приводу регулюючого органу насоса, гідромотора, датчиків температури і тиску рідини в частинах гідромотора, що обертаються, датчика положення, датчика швидкості, датчика перепаду тиску в гідролініях, інтегратора, блоку поділу, суматорів, релейного елементу, корегувального пристрою, нелінійних блоків згідно з винаходом - введено нагрівальний елемент, що дозволяє тестово підвищувати коефіцієнт в'язкості рідини при підвищені температури та блок діагностування і контролю для подачі цих тестови х сигналів, та обробки отриманої інформації для контролю і діагностування електрогідравлічного слідкуючого приводу. На фігурі показана схема електрогідравлічного слідкуючого приводу. Електрогідравлічний слідкуючий привід має вимірювач 1 неузгодження. перший блок 2 множення, послідовно з'єднаний підсилювач 3 і привід 4 регулюючого органу (не показаний) насоса 5, зв'язаного гідролініями 6 і 7 з гідромотором 8 з редуктором. Вал 9 гідромотора 8 з'єднаний з об'єктом 10 регулювання, датчиком 11 положення, датчиком 12 швидкості і датчиком моменту (не показаний). Привід містить також послідовно з'єднаний датчик 13 перепаду тиску в гідролініях 6 і 7, перший суматор 14, інтегратор 15, блок 16 поділу, а також другий суматор 17. Датчик 13 з'єднаний з першим позитивним входом суматора 14. Датчик моменту з'єднаний з другим негативним входом першого суматора 14, датчик 12 швидкості з входом блока поділу 16, а датчик 11 положення з негативним входом вимірювача неузгодження, Привід включає також аперіодичну ланку 18 другого порядку і дві послідовно з'єднані диференціюючі ланки 19 і 20 з уповільненням. При цьому вихід вимірювача 1 неузгодження через аперіодичну ланку з'єднаний з одним із входів др угого суматора 17, а через диференціюючи ланки 19 і 20 і один із входів першого блока 2 множення - з іншим входом другого суматора 17, вихід якого з'єднаний з підсилювачем 3. Вихід блока 16 поділу з'єднаний з другим входом першого блока 2 множення. Крім цього привід містить послідовно з'єднані датчик 21 температури, перший нелінійний блок 22, другий блок 23 множення, третій блок 24 множення і аперіодичну ланку 25, вихід якої підключений до третього входу другого суматора 17, а також послідовно з'єднані датчик 26 тиску і другий нелінійний блок 27 вихід якого з'єднаний з другим входом другого блока 23 множення, а четвертий блок 28 множення, перший і другий входи якого підключені відповідно до виходів датчика 12 швидкості і другого блока 23 множення, а вихід - до третього (негативного) входу першого суматора 14. четвертий (негативний) вхід якого через релейний елемент 29 підключений до виходу датчика 12 швидкості, а другий вхід третього 24 блока множення з'єднаний з виходом першої диференціюючої ланки 19 з уповільненням. Ланки 18, 19, 20 і 25 утворюють корегувальний пристрій приводу. Нагрівальний елемент 30 поміщений в робочу зону гідромотора 8, блок діагностування та контролю 31 для контролю працездатності електрогідравлічного слідкуючого приводу. На кресленні введені слідуючи позначення: αв і α - відповідно сигнали положення вала 9 з задаючого пристрою і з датчика 11 положення, ω - сигнал швидкості з датчика 12 швидкості; М - момент на валу 9; Р* сигнал з датчика 13 перепаду тиску в гідролініях 6 та 7; Рм - сигнал з датчика моменту; δ - величина неузгодженості (похибка приводу). Електрогідравлічний слідкуючий привід працює наступним чином. Сигнал δ через підсилювач 3 поступає на привід 4, регулюючого органа насоса 5, який, створюючи потік робочої рідини в гідролініях 6 та 7, впливає на гідромотор 8, змінюючи положення об'єкта 10 регулювання, зменшуючи неузгодження δ між вхідним сигналом αв і сигналом α датчика 11 положення. Для усунення негативного впливу перемінного моменту інерції об'єкта 10 регулювання і моменту в'язкого тертя на якісні показники праці всього приводу, служить корегувальний пристрій, що включає аперіодичну ланку 18 другого порядку, першу і другу диференціюючи ланки 19 і 20 з уповільненням і аперіодичну ланку 25. Причому коефіцієнти підсилення послідовного з'єднання диференційних ланок 19 і 20 змінюються в залежності від зміни моменту інерції об'єкта 10 регулювання, а аперіодичні ланки 25 - в залежності від зміни коефіцієнта в'язкого тертя. Передаточна функція електрогідравлічного слідкуючого приводу в розімкнутому стані може бути представлена у ви гляді a(t ) = W (P ) = W k (P )W y P Wp P W нгм (Р), (1) ( ) ( ) d(t ) де W(P) - передаточна функція приводу; Wy(P),Wp(P) - відповідно передаточні функції підсилювача 3 та регулюючого органу насоса 5; Wк (Р) - передаточна функція коригуючого пристрою; Wнгм (Р) - передаточна функція гідро передачі, яка включає насос 5 та гідромотор 8. Вираз для визначення моменту, що розвиває гідромотор 8 з урахуванням моментів сухого і в'язкого тертя, приймає вигляд: & Мгм = 0,01W д P* = Ji p w + M / i p + K в w + Мс тр (2) де Кв - коефіцієнт в'язкого тертя; Мстр - момент сухого тертя; J - момент інерції обертаючих частин гідромотора 8 і об'єкта 10, приведеного до вала гідромотора 8. З врахуванням виразу (2) передаточна функція Wнгм (Р) приймає вигляд (при формуванні Wнгм (Р)Мcтр вважається рівним нулю) a (t ) K Wнгм (Р) = = , (3) g (t ) æ 100JV ö 100КвV 2 ç ÷ Р + P+1 2 çK W2 ÷ K e Wд è e д ø де γ - кут повороту регулюючого органа насоса 5; ір - передаточне відношення редуктора; Wн W дв K= , ір g m W д Wн, Wд - характерні об'єми насоса 5 та гідромотора 8; Ке, γm - коефіцієнти пропорційності; Ωдв - швидкість обертання насоса 5; V - об'єм робочої рідини в гідролінії 6 або 7 нагнітання і полості нагнітання насоса 5; J - загальний момент інерції обертаючих частин гідромотора 8 та об'єкта 10 регулювання; Р - символ диференціювання. Параметри передаточних функцій Wнгм (Р) являються змінними, якщо змінними являються J та Кв. В результаті значно змінюються й динамічні властивості електрогідравлічного слідкую чого приводу при змінюванні J та Кв в широких межах. В деяких випадках можливо навіть втрата стійкості його роботи. Для зберігання незмінними динамічних властивостей електрогідравлічного слідкуючого приводу необхідна стабілізувати всі параметри передаточної функції W(P). Для цього служить корегувальний пристрій з передаточною функцією 100 JV 2 100К в V Р + P+1 2 K e W д2 a (t ) K e W д Wk (Р) = = , (4 ) g(t ) (T1P + 1)(T2P + 1) де Т1 і Т2 - деякі незмінні сталі часу, які можна вибирати, виходячи із вимог до динамічних властивостей привода. Параметри передаточної функції Wk(P) необхідно підстроювати з врахуванням поточного значення моменту інерції J і коефіцієнта Кв. Передаточна функція W(P) з врахуванням виразів (1), (3) і (4) набуває вигляду: K W (P) = W y (P)Wp P ) ( . (5) (T1P + 1)(T2P + 1) Із виразу (5) видно, що всі параметри передаточної функції W(P) залишаються незмінними, а значить незмінними залишаються динамічні властивості та якісні показники всього електрогідравлічного слідкуючого приводу взагалі, тобто точність та стійкість привода не залежить від зміни J та Кв. Корекція W(P) відбувається за допомогою аперіодичної ланки 18 другого порядку з передаточною функцією K W1в (P ) , (T1P + 1)(T2P + 1) двох ди ференційних ланок 19 і 20 з уповільненням, причому W19(P) та W20(P) мають вигляд K 1P W19 (P) = , (T1P + 1) W20 (P ) = K 2P (T P + 1) , 2 де K 1K 2 = 100V , K e W д2 а також аперіодичної ланки 25 з передаточною функцією виду K2 W25 (P ) = , (T2P + 1) Для настроювання параметрів Wk(P) по поточному значенню J і Кв використовується блок 2 множення, на другий вхід якого подається сигнал, пропорційний величині поточного моменту інерції приводу J, а також третій блок 24 множення, на перший вхід якого подається сигнал, пропорційний величині Кв. В результаті формований корегувальний пристрій має передаточну функцію, точно відповідно виразу (4). Сигнал, пропорційний J, формується наступним чином. Згідно виразу (2) величина J знаходиться із відношення ò (0 .01W дР * -М / і р - K д i p w - Mс тр )dt J= . (6 ) ip w Сигнал датчика моменту має вид 100М Pм = . ір W д Другий (негативний) вхід першого суматора 14 має коефіцієнт підсилення 1, його третій (негативний)вхід коефіцієнт підсилення 100ір/Wд, а четвертий (негативний) вхід - коефіцієнт підсилення 100/Wд. На другий вхід четвертого блоку 28 множення поступає сигнал, рівний Кв, а релейний елемент 29 з нульовою нейтральною точкою описується виразом Мстрsignω, тоді на виході першого суматора 14 формується сигнал 100M 100ip К в 100 P*wМ signw. ip W д Wд W д стр Передаточна функція інтегратора 15 має вигляд Wд W15 (P) = , 100ір P а на його виході формується сигнал ò (0. 01W дР * -М / і р - K дi pw - Mс тр )dt . ip Поділивши цей сигнал в блоці 16 ділення на сигнал со, на його виході маємо сигнал J по виразу (6), який і поступає на другий вхід першого блоку 2 множення. В'язкість рідини може бути визначена з а допомогою виразу m = m 0e ( ) ~ K p P - P0 -K т (Т - Т 0 ) , (7) ~ де Р і Т - відповідно поточні значення тиску рідини та її температури; Р0 і Т 0 - відповідно номінальні значення тиску рідини та її температури; m0 - в'язкість рідини при Р0 і Т0; Кр і Кт - незмінні коефіцієнти, які характеризують зміну в'язкості відповідно від зміни тиску і температури. Вид, аналогічний виразу (7), має і коефіцієнт в'язкого тертя ( ) К в = К 0 e p 0 т 0 , (8 ) в де К0в - коефіцієнт в'язкого тертя при Р0 і Т0. Якщо припустити, що датчики 21 і 26 температури і тиску встановлені в робочій зоні та міряють відповідно температуру Т й тиск Р рідини, в якій відбувається обертання рухомих частин гідромотора 8, а перший та другий нелінійні блоки 22 і 27 реалізують відповідно функціональні залежності виду ~ ~ ~ K P -P -K K 0 е Кз (Р - Р 0 ) в ~ ~ і ( Т- Т ) ~ K 0 е - Кт (Р - Р0 ) , в то на виході другого блоку 23 множення формується сигнал, пропорційний величині Кв (вираз (8)). Реалізувати нелінійні блоки 22 і 27 можна, наприклад, за допомогою пристроїв, здійснюючих кусочно-нелінійну апроксимацію нелінійності. Діагностування та контролепридатність електрогідравлічного слідкуючого приводу забезпечується за допомогою введення в пристрій нагрівального елементу 30, блоку діагностування та контролю 31.3 блока діагностування та контролю подаються контролюючі тестові сигнали на нагрівальний елемент 30. При цьому підвищується температура у робочій зоні гідромотора 8, змінюється коефіцієнт в'язкого тертя рідини, що приводить до зміни передаточної функції приводу. Це надає можливість під час роботи електрогідравлічного слідкуючого приводу контролювати та діагностувати його роботу. За рахунок підвищення температури, підвищується коефіцієнт в'язкого тертя рідини, що призводить до збільшення моменту інерції J (згідно виразу (6)). Внаслідок цього збільшується момент гідромотора і збільшується передаточна функція приводу. Таким чином, введення у пристрій нагрівального елементу 30 та блоку діагностування та контролю 31 дозволяє під час роботи електрогідравлічного слідкуючого приводу діагностува ти та контролювати його працездатність.
ДивитисяДодаткова інформація
Назва патенту англійськоюElectro-hydraulic follower drive
Автори англійськоюKulik Anatolii Stepanovych, Naroznnyi Vitaliy Vasyliovych, Firsov Serhii Mykolaiovych, Luchenko Oleh Oleksiiovych
Назва патенту російськоюЭлектрогидравлический следящий привод
Автори російськоюКулик Анатолий Степанович, Нарожный Виталий Васильевич, Фирсов Сергей Николаевич, Лученко Олег Алексеевич
МПК / Мітки
МПК: F15B 9/00
Мітки: електрогідравлічний, слідкуючий, привід
Код посилання
<a href="https://ua.patents.su/3-67680-elektrogidravlichnijj-slidkuyuchijj-privid.html" target="_blank" rel="follow" title="База патентів України">Електрогідравлічний слідкуючий привід</a>
Слідкуючий електропривід зі змінним моментом інерції

Номер патенту: 36098
Опубліковано: 16.04.2001
Автори: Балін Генадій Миколайович, Аркадьєв Віктор Юрійович, Лебеденко Юрій Олександрович, Пекеліс Дмитро Аркадійович, Боярчук Володимир Петрович
МПК: G05B 11/01, G05B 13/02
Мітки: моментом, інерції, змінним, слідкуючий, електропривід
Текст:
...зміна сигналу з виходу функціонального регулятора 12, що еквівалентно зміні параметрів самоналагоджуваного регулятору 9 швидкості. Сигнал джерела 14 опорного струму, пропорційний статичному струму ІС електродвигуна, й дат чика 7 струму якорю ІЯ, електродвигуна 2, просумовані суматором 15, формують на його виході сигнал динамічного моменту електроприводу Мдин Сm(ІЯ-ІС), де Сm - конструктивна постійна еле= ктродвигуна, яка установлює...
Пневмогідравлічний слідкуючий привід
Номер патенту: 34811
Опубліковано: 15.03.2001
Автори: Яхно Олег Михайлович, Лисенко Володимир Сергійович, Бабенко Олег Ігорович, Казидуб Ростислав Олександрович, Мельничук Олександр Анатолійович, Таурит Тетяна Георгіївна
МПК: F15B 9/00
Мітки: слідкуючий, привід, пневмогідравлічний
Формула / Реферат:
1. Пневмогідравлічний слідкуючий привід, що має, зв'язані загальним валом пневматичний двигун і гідравлічний насос, редуктор, пневмогідравлічний слідкуючий пристрій з поворотним елементом, включаючи пневматичний розподільник з вікнами, повернутими до виступу поворотного елементу і підключеними каналами до пневматичного двигуна і двох нормально відкритих допоміжних розподільників, з'єднаних кожний входом з пневматичним двигуном і пневматичним...
Електрогідравлічний слідкуючий привод
Номер патенту: 5700
Опубліковано: 28.12.1994
Автори: Канюк Генадій Іванович, Гапон Олександр Васильович, Калінін Борис Петрович, Пакулов Костянтин Миколайович
МПК: F15B 9/00
Мітки: слідкуючий, електрогідравлічний, привод
Формула / Реферат:
(57) Электрогидравлический следящий привод, содержащий последовательно соединенные задающий блок, сумматор, электронный усилитель, электрогидравлический усилитель, подключенный к исполнительному гидромеханизму, и датчик положения последнего, а также цепь отрицательной обратной связи по положению, включающую корректирующий блок для компенсации погрешности, вход которого соединен с датчиком положения, а выход - с сумматором, отличающийся тем,...
Електрогідравлічний слідкуючий привод
Номер патенту: 5062
Опубліковано: 28.12.1994
Автор: Пономаренко Анатолій Олександрович
МПК: F15B 9/00
Мітки: слідкуючий, електрогідравлічний, привод
Формула / Реферат:
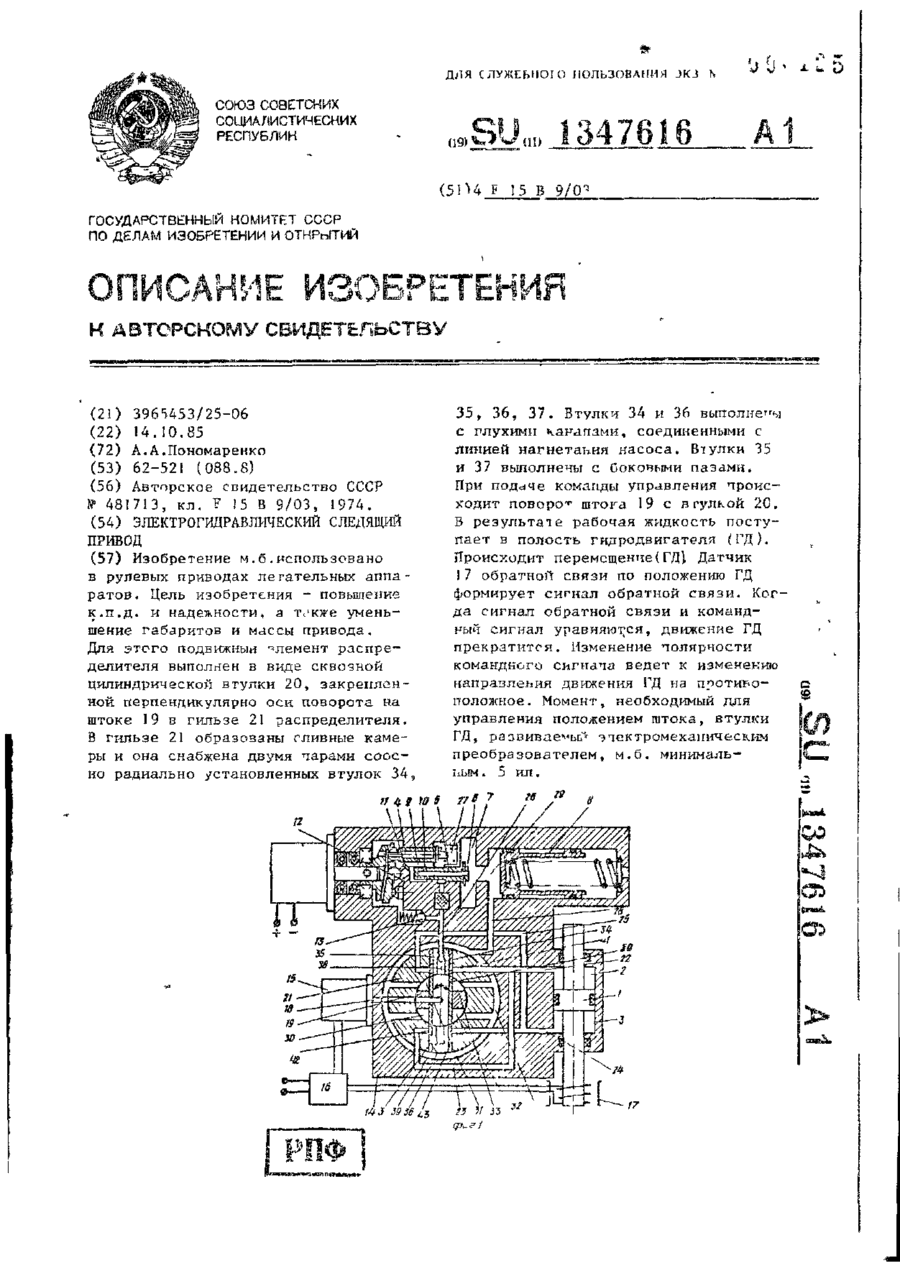
Электрогидравлический следящий привод, содержащий исполнительный гидродвигатель, насос регулируемой производительности и электрогидравлический усилитель, электромеханический преобразователь которого электрически связан с задатчиком и датчиком обратной связи исполнительного гидродвигателя и кинематически связан поворотным валом со штоком подвижного элемента распределителя, каналы гильзы которого подключены к линии нагнетания насоса, сливу...
Слідкуючий привід подачі металорізального верстата з компенсацією похибок напрямних
Номер патенту: 63306
Опубліковано: 15.01.2004
Автори: Мельник Максим Сергійович, Владимиров Анатолій Юрієвич, Ковальов Віктор Дмитрович, Бабін Олег Фавієвич
МПК: G05D 3/12
Мітки: компенсацією, привід, напрямних, металорізального, похибок, верстата, слідкуючий, подачі
Формула / Реферат:
Слідкуючий привід подачі металорізального верстата з компенсацією похибок напрямних, що містить рухомий вузол, розташований на напрямних поперечного переміщення, які розташовані на напрямних повздовжнього переміщення, електродвигун поперечної подачі , зв'язаний механічно з рухомим вузлом, імпульсний дискретний датчик, електронний цифровий реверсивний лічильник, вхід якого зв'язаний з імпульсним дискретним датчиком, задавальний пристрій,...
Попередній патент: Спосіб досліджування оброблюваності матеріалів різанням
Наступний патент: Спосіб профілактики інтранатального інфікування плода у віл-інфікованих жінок при проведенні пологів через природні пологові шляхи
Випадковий патент: Оптичний неінвазивний пристрій для визначення рівня периферійного кровонаповнення та сатурації крові