Слідкуючий гідропривід
Номер патенту: 7129
Опубліковано: 15.06.2005
Автори: Соколов Володимир Ілліч, Коваленко Алім Олексійович, Баранич Юлія Вікторівна, Левченко Климент Олександрович
Формула / Реферат
Слідкуючий гідропривід, що містить виконавчий гідродвигун-гідроциліндр, гідропідсилювач з вихідними каналами і механізм зворотного зв'язку, який відрізняється тим, що у вихідних каналах гідропідсилювача в напрямку до виконавчого гідродвигуна встановлені редукційні клапани постійного перепаду тисків між лінією живлення і вихідними каналами гідропідсилювача, причому паралельно редукційним клапанам підключені зворотні клапани, закриті до виконавчого двигуна.
Текст
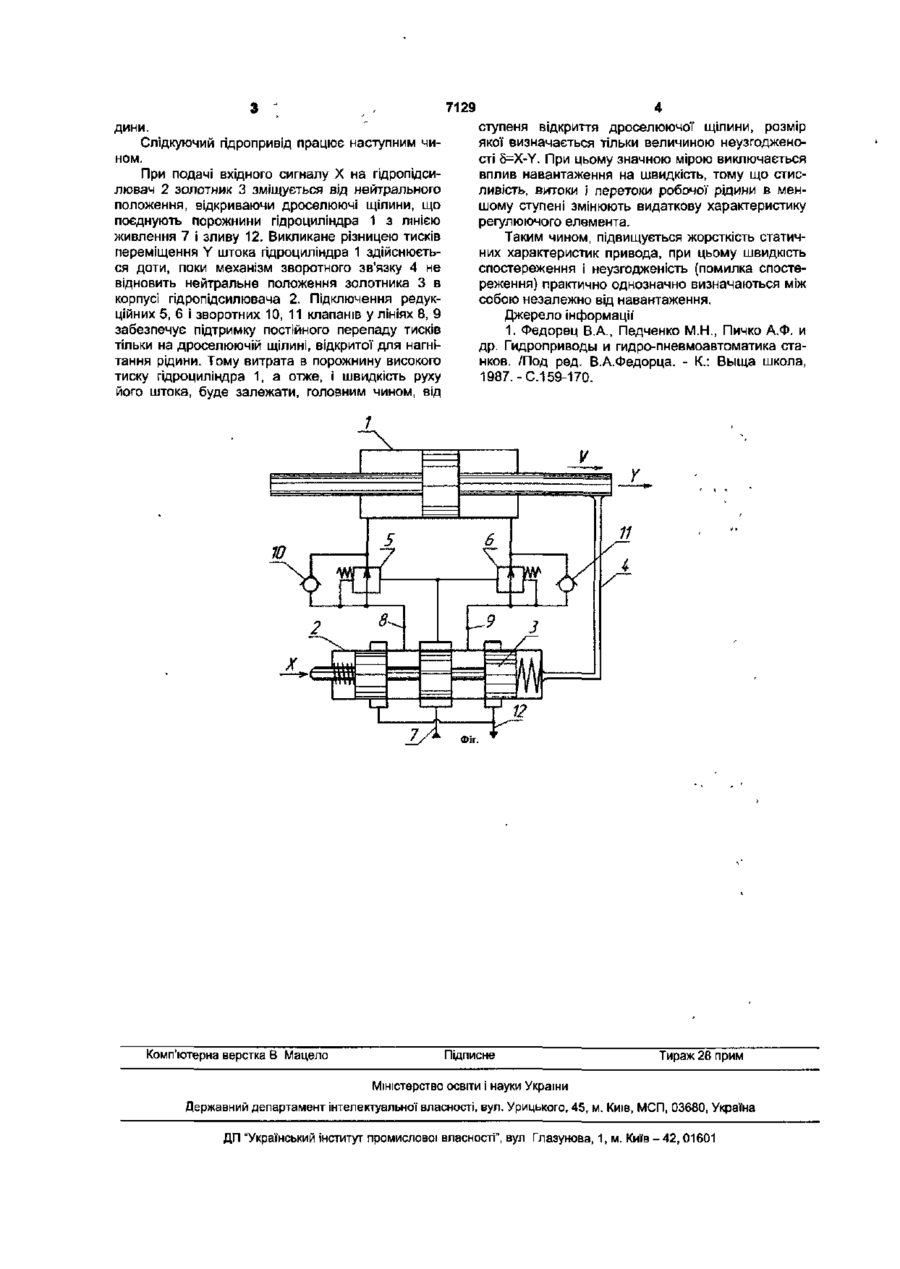
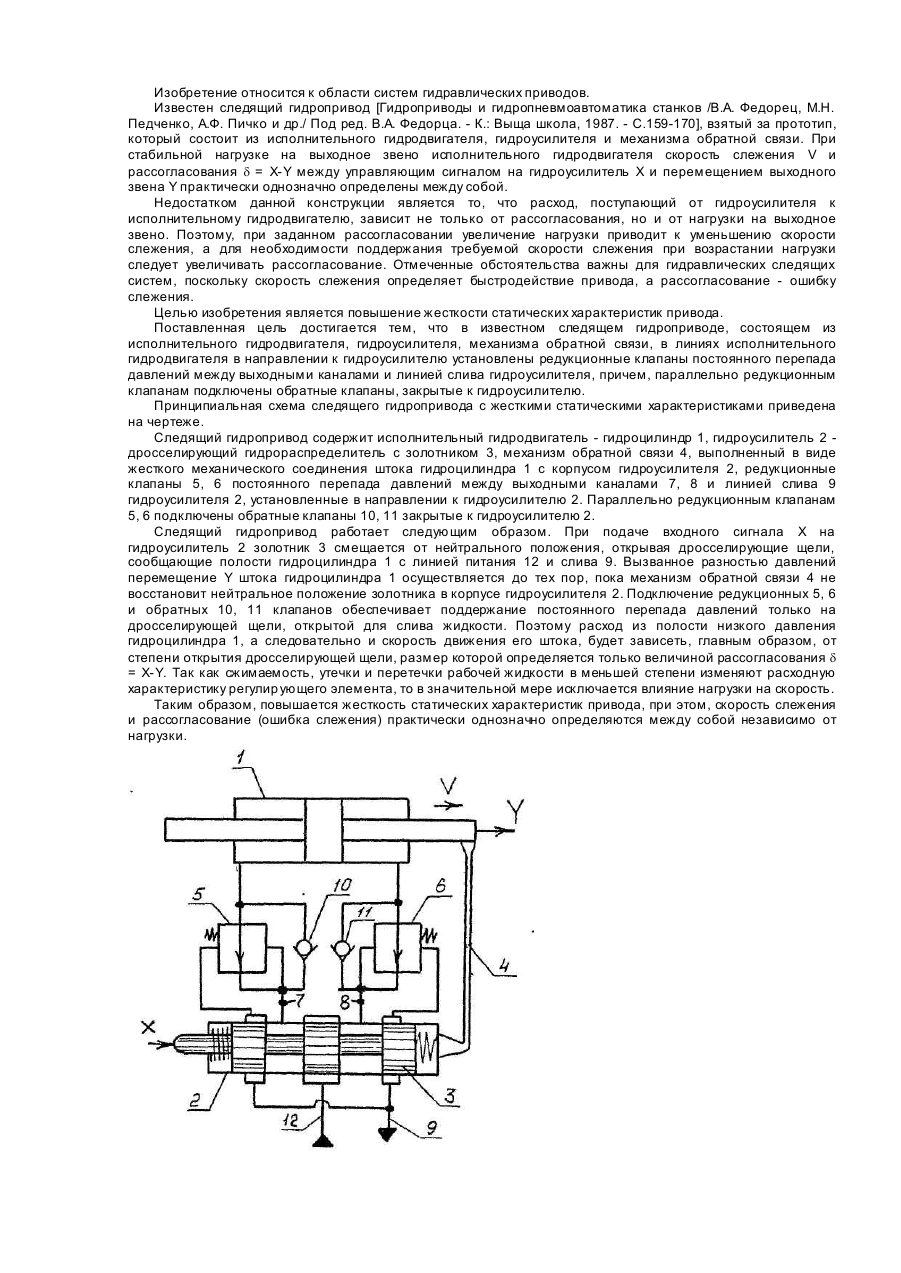
Слідкуючий гідропривід, що містить виконавчий гідродвигун-гідроциліндр, гідропідсилювач з вихідними каналами і механізм зворотного зв'язку, який відрізняється тим, що у вихідних каналах гідропідсилювача в напрямку до виконавчого гідродвигуна встановлені редукційні клапани постійного перепаду тисків між лінією живлення і вихідними каналами гідропідсилювача, причому паралельно редукційним клапанам підключені зворотні клапани, закриті до виконавчого двигуна. Корисна модель відноситься до систем гідравлічних приводів і може бути використана в машинобудуванні як ефективний засіб автоматизації виробничих процесів Відомо слідкуючий гідропривід [1], обраний за прототип, який містить виконавчий гідро двигун гідроциліндр, гідропідсилювач з вихідними каналами і механізм зворотного зв'язку При стабільному навантаженні на вихідну ланку виконавчого гідродвигуна швидкість спостереження V і неузгодженість 5=X-Y між керуючим сигналом на гідропідсилювач X і переміщенням вихідної ланки Y практично однозначно визначені між собою. Недоліком відомого пристрою є те, що витрата робочої рідини, що надходить від гідропідсилювача до виконавчого гідродвигуна, залежить не тільки від неузгодженості, але і від навантаження на вихідну ланку. Тому, при заданій неузгодженості, збільшення навантаження приводить до зменшення швидкості спостереження, а для необхідності підтримання потрібної швидкості спостереження при зростанні навантаження варто збільшувати неузгодженість. Відзначені обставини важливі для гідравлічних слідкуючих систем, оскільки швидкість спостереження визначає швидкодію привода, а неузгодженість - помилку спостереження. В основу корисної моделі поставлено задачу удосконалення слідкуючого гідроприводу шляхом того, що у вихідних каналах гідропідсилювача встановлені редукційні клапани, а паралельно редукційним клапанам підключені зворотні клапани, що приведе до підвищення жорсткості статичних характеристик привода, при цьому, швидкість спостереження і неузгодженість (помилка спостереження) практично однозначно визначаються між собою незалежно від навантаження. Поставлена задача досягається тим, що в слідкуючому пдроприводі, який містить виконавчий гідродвигун - гідроциліндр, гідропідсилювач з вихідними каналами, механізм зворотного зв'язку, відповідно до корисної моделі, у вихідних каналах гідропідсилювача у напрямку до виконавчого гідродвигуна встановлені редукційні клапани постійного перепаду тисків між лінією живлення і вихідними каналами гідропщсилювача, причому, паралельно редукційним клапанам підключені зворотні клапани, закриті до виконавчого гідродвигуна. Принципова схема слідкуючого гідроприводу приведена на кресленні. Слідкуючий гідропривід містить виконавчий гідродвигун - гідроциліндр 1, гідропідсилювач 2 дроселюючий гідророзподільник із золотником З, механізм зворотного зв'язку 4, виконаний у вигляді твердого механічного з'єднання штока гідроциліндра 1 з корпусом гідропідсилювача 2, редукційні клапани 5, 6 постійного перепаду тисків між лінією живлення 7 і вихідними каналами 8, 9 гідропідсилювача 2, встановлені у напрямку до гідроциліндра 1 Паралельно редукційним клапанам 5, 6 підключені зворотні клапани 10, 11, закриті до гідроциліндра 1. Лінія 12 - лінія зливу робочої рі CM І 7129 дини. Слідкуючий гідропривід працює наступним чином. При подачі вхідного сигналу X на гідропідсилювач 2 золотник 3 зміщується від нейтрального положення, відкриваючи дроселюючі щілини, що поєднують порожнини гідроциліндра 1 з лінією живлення 7 І зливу 12. Викликане різницею тисків переміщення Y штока гідроциліндра 1 здійснюється доти, поки механізм зворотного зв'язку 4 не відновить нейтральне положення золотника 3 в корпусі гідропідсилювача 2. Підключення редукційних 5, 6 і зворотних 10, 11 клапанів у лініях 8, 9 забезпечує підтримку постійного перепаду тисків тільки на дроселюючій щілині, відкритої для нагнітання рідини. Тому витрата в порожнину високого тиску гідроциліндра 1, а отже, і швидкість руху його штока, буде залежати, головним чином, від ступеня відкриття дроселюючої щілини, розмір якої визначається тільки величиною неузгодженості 5=X-Y. При цьому значною мірою виключається вплив навантаження на швидкість, тому що стисливість, витоки і перетоки робочої рідини в меншому ступені змінюють видаткову характеристику регулюючого елемента. Таким чином, підвищується жорсткість статичних характеристик привода, при цьому швидкість спостереження і неузгодженість (помилка спостереження) практично однозначно визначаються між собою незалежно від навантаження. Джерело інформації 1. Федорец В.А., Педченко М.Н., Пичко А.Ф. и др. Гидроприводы и гидро-пневмоавтоматика станков. /Под ред. В.А.Федорца. - К.: Выща школа, 1987.-С.159-170. Фіг. Комп'ютерна верстка В Мацепо Підписне Тираж 28 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м. Київ-42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюFollowing hydraulic circuit
Автори англійськоюSokolov Volodymyr Illich, Kovalenko Alim Oleksiiovych, Baranych Yulia Viktorivna
Назва патенту російськоюСледящий гидропривод
Автори російськоюСоколов Владимир Ильич, Коваленко Алим Алексеевич, Баранич Юлия Викторовна
МПК / Мітки
МПК: F15B 15/22
Мітки: слідкуючий, гідропривід
Код посилання
<a href="https://ua.patents.su/2-7129-slidkuyuchijj-gidroprivid.html" target="_blank" rel="follow" title="База патентів України">Слідкуючий гідропривід</a>
Слідкуючий гідропривід
Номер патенту: 7112
Опубліковано: 15.06.2005
Автори: Баранич Юлія Вікторівна, Коваленко Алім Олексійович, Левченко Климент Олександрович, Соколов Володимир Ілліч
МПК: F15B 15/22
Мітки: гідропривід, слідкуючий
Формула / Реферат:
Слідкуючий гідропривід, який містить виконавчий гідродвигун - гідроциліндр, гідропідсилювач з вихідними каналами і механізм зворотного зв'язку, який відрізняється тим, що у лініях виконавчого гідродвигуна в напрямку до гідропідсилювача встановлені редукційні клапани постійного перепаду тисків між вихідними каналами гідропідсилювача і лінією зливу, причому паралельно редукційним клапанам підключені зворотні клапани, закриті до...
Слідкуючий електрогідравлічний привід
Номер патенту: 69233
Опубліковано: 16.08.2004
Автори: Нарожний Віталій Васильович, Лученко Олег Олексійович, Таран Олександр Миколайович, Кулік Анатолій Степанович, Фірсов Сергій Миколайович
МПК: F15B 9/00
Мітки: слідкуючий, електрогідравлічний, привід
Формула / Реферат:
Слідкуючий електрогідравлічний привід, який складається з послідовно з'єднаних задатчика, порівнюючого пристрою, гідропідсилювача і виконавчого гідродвигуна з потенціометром зворотного зв'язку, підключеного через буферний блок фазової корекції до порівнюючого пристрою та схеми корекції, підключеної через перемикаючий пристрій до гідропідсилювача, який відрізняється тим, що до схеми додано блок діагностування потенціометра зворотного зв'язку,...
Слідкуючий дискретний гідропривід робочих органів землерийних машин
Номер патенту: 52268
Опубліковано: 16.12.2002
Автори: Смірнов Вячеслав Миколайович, Солонько Руслан Миколайович, Рашківський Володимир Павлович, Баладінський Вадим Леонідович, Пелевін Леонід Євгенович
Мітки: дискретний, органів, землерийних, слідкуючий, робочих, машин, гідропривід
Формула / Реферат:
Слідкуючий дискретний гідропривід робочих органів землерийних машин, що включає бак з гідрорідиною, насос, розподільник, запобіжний клапан, гідроциліндр навантаження, який відрізняється тим, що між розподільником та гідроциліндром навантаження встановлено слідкуючий пристрій, що включає в себе клапан спрацювання, вхідна лінія якого під’єднується до напірної магістралі розподільника, а вихідна лінія - до штокової порожнини гідроциліндра...
Слідкуючий гідропривід

Номер патенту: 23347
Опубліковано: 31.08.1998
Автор: Соколов Володимир Ілліч
МПК: F15B 9/00
Мітки: гідропривід, слідкуючий
Формула / Реферат:
Следящий гидропривод, состоящий из исполнительного гидродвигателя, гидроусилителя и механизма обратной связи, отличающийся тем, что для повышения жесткости статических характеристик привода в выходных каналах гидроусилителя в направлении к исполнительному гидродвигателю установлены редукционные клапаны постоянного перепада давлений между линией питания и выходными каналами гидроусилителя, причем параллельно редукционным клапанам подключены...
Слідкуючий гідропривід
Номер патенту: 23348
Опубліковано: 31.08.1998
Автор: Соколов Володимир Ілліч
МПК: F15B 9/00
Мітки: слідкуючий, гідропривід
Формула / Реферат:
Следящий гидропривод, состоящий из исполнительного гидродвигателя, гидроусилителя, механизма обратной связи, отличающийся тем, что для повышения жесткости статических характеристик привода в линиях исполнительного гидродвигателя в направлении к гидроусилителю установлены редукционные клапаны постоянного перепада давлений между выходными каналами и линией слива гидроусилителя, причем, параллельно редукционным клапанам подключены обратные...
Попередній патент: Водогрійний котел генеренка о.о.
Наступний патент: Похідні бензазолу та їх застосування як модуляторів jnk
Випадковий патент: Система підготування та подачі водопаливної емульсії в двигун внутрішнього згоряння