Пневматичний виконавчий механізм
Номер патенту: 72124
Опубліковано: 17.01.2005
Автори: Лученко Олег Олексійович, Борисов Олексій Миколайович, Кулік Анатолій Степанович, Нарожний Віталій Васильович, Фірсов Сергій Миколайович
Формула / Реферат
Пневматичний виконавчий механізм, що містить пневмоциліндр із встановленим у ньому поршнем зі штоком, електрокероване ущільнення поршня, що включає неферомагнітну перегородку, яка розділяє його на дві секції, а з обох сторін перегородки виконані кільцеві пази, у які встановлені гальванічно не зв'язані обмотки збудження, при цьому перегородка виконана з каналами для сполучення кільцевих пазів між собою і з атмосферою, і феромагнітну рідину, що заповнює зазор між пневмоциліндром і поршнем, при цьому пневмоциліндр і поршень зі штоком виконані з феромагнітного матеріалу, який відрізняється тим, що в нього введено датчик температур, який з'єднано з елементом тестового впливу і блоком контролю.
Текст
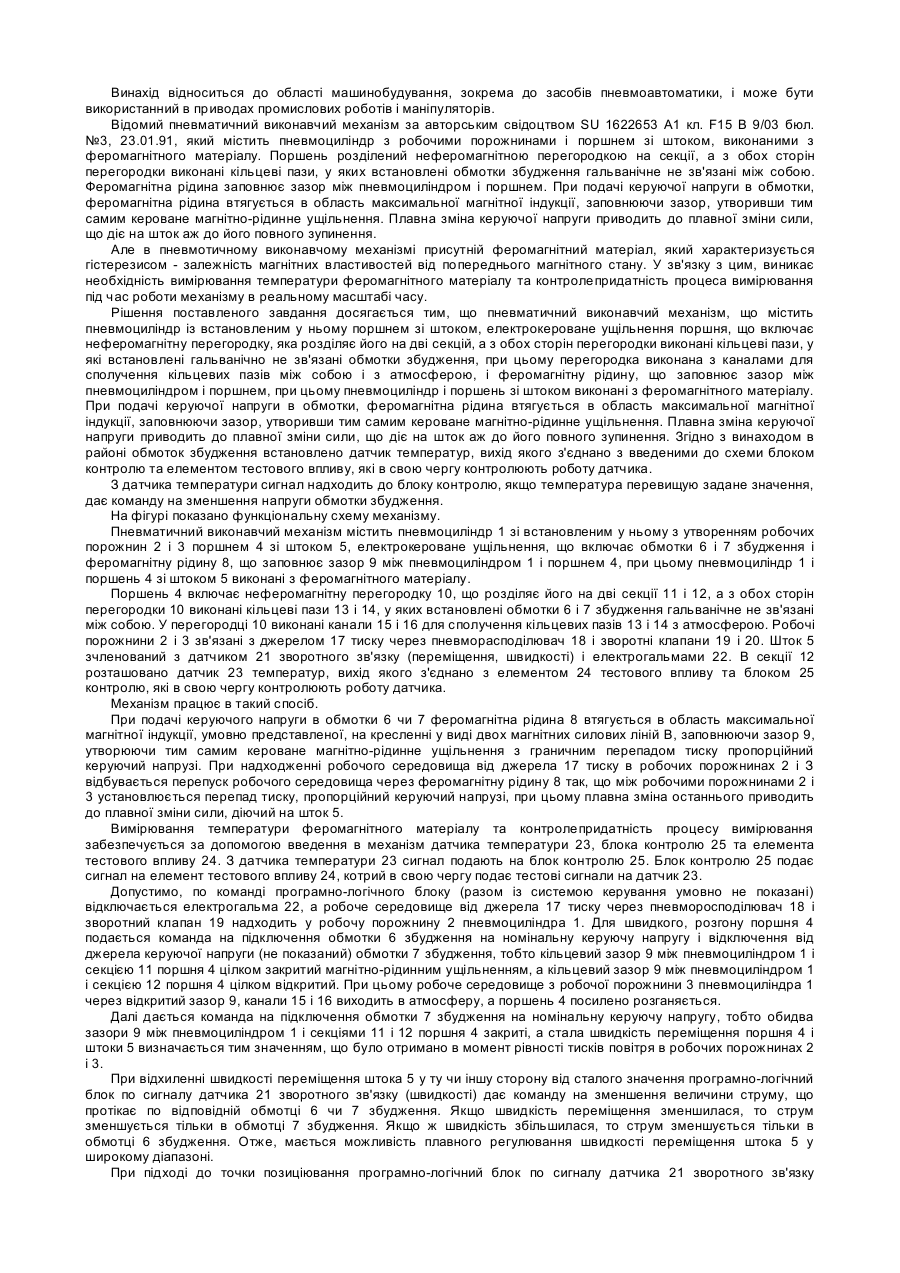
Винахід відноситься до області машинобудування, зокрема до засобів пневмоавтоматики, і може бути використанний в приводах промислових роботів і маніпуляторів. Відомий пневматичний виконавчий механізм за авторським свідоцтвом SU 1622653 А1 кл. F15 В 9/03 бюл. №3, 23.01.91, який містить пневмоциліндр з робочими порожнинами і поршнем зі штоком, виконаними з феромагнітного матеріалу. Поршень розділений неферомагнітною перегородкою на секції, а з обох сторін перегородки виконані кільцеві пази, у яких встановлені обмотки збудження гальванічне не зв'язані між собою. Феромагнітна рідина заповнює зазор між пневмоциліндром і поршнем. При подачі керуючої напруги в обмотки, феромагнітна рідина втягується в область максимальної магнітної індукції, заповнюючи зазор, утворивши тим самим кероване магнітно-рідинне ущільнення. Плавна зміна керуючої напруги приводить до плавної зміни сили, що діє на шток аж до його повного зупинення. Але в пневмотичному виконавчому механізмі присутній феромагнітний матеріал, який характеризується гістерезисом - залежність магнітних властивостей від попереднього магнітного стану. У зв'язку з цим, виникає необхідність вимірювання температури феромагнітного матеріалу та контролепридатність процеса вимірювання під час роботи механізму в реальному масштабі часу. Рішення поставленого завдання досягається тим, що пневматичний виконавчий механізм, що містить пневмоциліндр із встановленим у ньому поршнем зі штоком, електрокероване ущільнення поршня, що включає неферомагнітну перегородку, яка розділяє його на дві секцій, а з обох сторін перегородки виконані кільцеві пази, у які встановлені гальванічно не зв'язані обмотки збудження, при цьому перегородка виконана з каналами для сполучення кільцевих пазів між собою і з атмосферою, і феромагнітну рідину, що заповнює зазор між пневмоциліндром і поршнем, при цьому пневмоциліндр і поршень зі штоком виконані з феромагнітного матеріалу. При подачі керуючої напруги в обмотки, феромагнітна рідина втягується в область максимальної магнітної індукції, заповнюючи зазор, утворивши тим самим кероване магнітно-рідинне ущільнення. Плавна зміна керуючої напруги приводить до плавної зміни сили, що діє на шток аж до його повного зупинення. Згідно з винаходом в районі обмоток збудження встановлено датчик температур, вихід якого з'єднано з введеними до схеми блоком контролю та елементом тестового впливу, які в свою чергу контролюють роботу датчика. З датчика температури сигнал надходить до блоку контролю, якщо температура перевищую задане значення, дає команду на зменшення напруги обмотки збудження. На фігурі показано функціональну схему механізму. Пневматичний виконавчий механізм містить пневмоциліндр 1 зі встановленим у ньому з утворенням робочих порожнин 2 і 3 поршнем 4 зі штоком 5, електрокероване ущільнення, що включає обмотки 6 і 7 збудження і феромагнітну рідину 8, що заповнює зазор 9 між пневмоциліндром 1 і поршнем 4, при цьому пневмоциліндр 1 і поршень 4 зі штоком 5 виконані з феромагнітного матеріалу. Поршень 4 включає неферомагнітну перегородку 10, що розділяє його на дві секції 11 і 12, а з обох сторін перегородки 10 виконані кільцеві пази 13 і 14, у яких встановлені обмотки 6 і 7 збудження гальванічне не зв'язані між собою. У перегородці 10 виконані канали 15 і 16 для сполучення кільцевих пазів 13 і 14 з атмосферою. Робочі порожнини 2 і 3 зв'язані з джерелом 17 тиску через пневморасподілювач 18 і зворотні клапани 19 і 20. Шток 5 зчленований з датчиком 21 зворотного зв'язку (переміщення, швидкості) і електрогальмами 22. В секції 12 розташовано датчик 23 температур, вихід якого з'єднано з елементом 24 тестового впливу та блоком 25 контролю, які в свою чергу контролюють роботу датчика. Механізм працює в такий спосіб. При подачі керуючого напруги в обмотки 6 чи 7 феромагнітна рідина 8 втягується в область максимальної магнітної індукції, умовно представленої, на кресленні у виді двох магнітних силових ліній В, заповнюючи зазор 9, утворюючи тим самим кероване магнітно-рідинне ущільнення з граничним перепадом тиску пропорційний керуючий напрузі. При надходженні робочого середовища від джерела 17 тиску в робочих порожнинах 2 і З відбувається перепуск робочого середовища через феромагнітну рідину 8 так, що між робочими порожнинами 2 і 3 установлюється перепад тиску, пропорційний керуючий напрузі, при цьому плавна зміна останнього приводить до плавної зміни сили, діючий на шток 5. Вимірювання температури феромагнітного матеріалу та контролепридатність процесу вимірювання забезпечується за допомогою введення в механізм датчика температури 23, блока контролю 25 та елемента тестового впливу 24. З датчика температури 23 сигнал подають на блок контролю 25. Блок контролю 25 подає сигнал на елемент тестового впливу 24, котрий в свою чергу подає тестові сигнали на датчик 23. Допустимо, по команді програмно-логічного блоку (разом із системою керування умовно не показані) відключається електрогальма 22, а робоче середовище від джерела 17 тиску через пневморосподілювач 18 і зворотний клапан 19 надходить у робочу порожнину 2 пневмоциліндра 1. Для швидкого, розгону поршня 4 подається команда на підключення обмотки 6 збудження на номінальну керуючу напругу і відключення від джерела керуючої напруги (не показаний) обмотки 7 збудження, тобто кільцевий зазор 9 між пневмоциліндром 1 і секцією 11 поршня 4 цілком закритий магнітно-рідинним ущільненням, а кільцевий зазор 9 між пневмоциліндром 1 і секцією 12 поршня 4 цілком відкритий. При цьому робоче середовище з робочої порожнини 3 пневмоциліндра 1 через відкритий зазор 9, канали 15 і 16 виходить в атмосферу, а поршень 4 посилено розганяється. Далі дається команда на підключення обмотки 7 збудження на номінальну керуючу напругу, тобто обидва зазори 9 між пневмоциліндром 1 і секціями 11 і 12 поршня 4 закриті, а стала швидкість переміщення поршня 4 і штоки 5 визначається тим значенням, що було отримано в момент рівності тисків повітря в робочих порожнинах 2 і 3. При відхиленні швидкості переміщення штока 5 у ту чи іншу сторону від сталого значення програмно-логічний блок по сигналу датчика 21 зворотного зв'язку (швидкості) дає команду на зменшення величини струму, що протікає по відповідній обмотці 6 чи 7 збудження. Якщо швидкість переміщення зменшилася, то струм зменшується тільки в обмотці 7 збудження. Якщо ж швидкість збільшилася, то струм зменшується тільки в обмотці 6 збудження. Отже, мається можливість плавного регулювання швидкості переміщення штока 5 у широкому діапазоні. При підході до точки позиціювання програмно-логічний блок по сигналу датчика 21 зворотного зв'язку (переміщення) дає команду на зменшення струму, що протікає через обмотку 6 збудження, а потім і її повне відключення від джерела керуючого напруги, тобто кільцевий зазор 9 між пневмоциліндром 1 і секцією 11 поршня 4 плавно відкривається, а кільцевий зазор 9 між пневмоциліндром 1 і секцією 12 цілком закритий. При цьому робоче середовище з робочої порожнини 2 через відкритий зазор 9, канали 15 і 16 виходить в атмосферу. Починається процес гальмування. Поршень 4 зі штоком 5 переходять на так звану повзучу швидкість переміщення, а при підході штока 5 до заданої крапки позиціювання програмно-логічний блок по сигналу датчика 21 зворотного зв'язку (переміщення) дає команду на збільшення струму, що протікає через обмотку 6 збудження, а також і підключення її на номінальну керуючу напругу. Зазори 9 між внутрішньою поверхнею пневмоциліндра 1 і секціями 11 і 12 поршня 4 при цьому будуть закриті й обидві робочі порожнини 6 і 7 не зв'язані з атмосферою. Поршень 4 зі штоком 5 зупиняються в заданій крапці позиціювання й одночасно з цим останній фіксується в ній електрогальмами 22, що спрацьовує по команді програмно-логічного блоку. Робота виконавчого механізму при переміщенні в зворотному напрямку відбувається аналогічно при відповідному стані обмоток 6 і 7 і порожнин 2 і 3. Таким чином, має місце розширення функціональних можливостей і поліпшення швидкості та надійності пневматичноговвканавчого механізма.
ДивитисяДодаткова інформація
Назва патенту англійськоюPneumatic actuating mechanism
Автори англійськоюKulik Anatolii Stepanovych, Naroznnyi Vitaliy Vasyliovych, Firsov Serhii Mykolaiovych, Luchenko Oleh Oleksiiovych
Назва патенту російськоюПневматический исполнительный механизм
Автори російськоюКулик Анатолий Степанович, Нарожный Виталий Васильевич, Фирсов Сергей Николаевич, Лученко Олег Алексеевич
МПК / Мітки
МПК: F15B 9/00
Мітки: пневматичний, механізм, виконавчий
Код посилання
<a href="https://ua.patents.su/2-72124-pnevmatichnijj-vikonavchijj-mekhanizm.html" target="_blank" rel="follow" title="База патентів України">Пневматичний виконавчий механізм</a>
Виконавчий механізм рульового керування транспортного засобу

Номер патенту: 63416
Опубліковано: 15.01.2004
Автори: Крилов Володимир Вікторович, Бондар Андрій Миколайович, Антонова Галина Володимирівна, Жуковський Віктор Анатолійович, Просвірнін Віктор Іванович, Лубяний Микола Миколайович, Петров Віктор Олексійович
МПК: B62D 5/10
Мітки: механізм, засобу, транспортного, рульового, виконавчий, керування
Формула / Реферат:
1. Виконавчий механізм рульового керування транспортного засобу, який має гідроциліндр двосторонньої дії, поршень з ущільнювальними кільцями та штоком, кришки, патрубки для підводу робочої рідини, який відрізняється тим, що поршень має кільцеподібні магніти, які установлені на бічних його поверхнях.2. Виконавчий механізм за п. 1, який відрізняється тим, що магніти закріплені на бічних поверхнях через немагнітні шайби.3....
Виконавчий механізм для інгалятора та інгалятор, що містить виконавчий механізм
Номер патенту: 66820
Опубліковано: 15.06.2004
Автори: Расмуссен Ерген, Ходсон Деррен
МПК: A61M 15/00, A61M 11/00
Мітки: містить, виконавчий, механізм, інгалятор, інгалятора
Формула / Реферат:
1. Виконавчий механізм для інгалятора, призначеного для введення лікарського засобу шляхом інгаляції, що містить основне тіло (2), що включає в себе трубчастий елемент (8) для прийому респіраторного флакона (7), що містить лікарський засіб, і шток (11) клапана, що виходить з нього, випускний вузол (4) у вигляді частини, утвореної окремо від основного тіла (2), що містить мундштук для направлення лікарського засобу в рот користувача і блок...
Гідравлічний виконавчий механізм
Номер патенту: 566
Опубліковано: 15.12.1993
Автори: Іванов Олександр Михайлович, Пострічев Юрій Володимирович, Жуковський Станіслав Іванович, Стебловський Ігор Антонович
МПК: F15B 15/28, F15B 15/00
Мітки: механізм, гідравлічний, виконавчий
Формула / Реферат:
1. Гидравлический исполнительный механизм, включающий корпус с верхней и нижней крышками и штуцерами для подвода рабочей жидкости, поршень-шток, установленный в корпусе с образованием поршневой и штоковой полостей, закрепленный на нижней крышке датчик перемещения, узел крепления штока, выполненный в виде серьги, и узел крепления нижней крышки, отличающийся тем, что нижнее крепление выполнено в виде захвата, включающего зубчатый держатель, в...
Пневматичний циліндр
Номер патенту: 1829
Опубліковано: 15.05.2003
Автор: Дольберг Володимир Ісаакович
МПК: F16J 10/00
Мітки: пневматичний, циліндр
Формула / Реферат:
Пневматичний циліндр, що містить корпус, поршень, шток, зворотну пружину, ущільнюючий елемент, який відрізняється тим, що поршень, виконаний з полімеру, з’єднаний зі штоком литтям, при цьому поверхня поршня, що взаємодіє з ущільнюючим елементом, виконана відкритою і має на торцевій частині кільцеву призахідну фаску.
Виконавчий пневмоциліндр
Номер патенту: 32225
Опубліковано: 15.12.2000
Автори: Савків Володимир Богданович, Лобур Тарас Богданович, Федорів Петро Степанович, Данилюк Ольга Андріївна, Козбур Ігор Романович, Проць Ярослав Іванович
МПК: F15B 15/22
Мітки: пневмоциліндр, виконавчий
Текст:
...роботи виконавчого пневмоциліндра, а також підвищить його силові характеристики. Суть винаходу пояснюють графічні матеріали на яких зображено: фігЛ - розріз А-А на фіг.2 (повздовжній розріз виконавчого пневмоциліндра); фіг.2 - розріз Б-Б на фіг. 1 (поперечний розріз стакана); фіг.З - розріз В-В на фіг. 1 (поперечний розріз виконавчого пневмоциліндра). Виконавчий пневмоциліндр містить стакан 1 з отворами 2 на торці і направляючими 3 на...