Пристрій для поосьового зважування вагонів технологічного транспорту під час руху
Номер патенту: 67937
Опубліковано: 15.07.2004
Автори: Сацюк Валерій Іванович, Раздобаров Віктор Георгійович, Ситий Володимир Іванович, Чаков Олександр Миколайович, Лісовий Віталій Васильович

Формула / Реферат
Пристрій для поосьового зважування вагонів технологічного транспорту під час руху, що містить вантажоприймальний вузол, який складається з платформи, що опирається на силовимірювальні датчики, підключені до аналого-цифрового перетворювача, вузол визначення напрямку руху, блок процесора з запам'ятовуючими пристроями, з входами якого з'єднані аналого-цифровий перетворювач і вузол визначення напрямку руху, а його вихід через інтерфейс з'єднаний із реєструючими пристроями, який відрізняється тим, що в нього введені три колійні датчики, два RS-тригери, два елементи АБО, тривхідний елемент АБО-НІ, два D-тригери і три формувачі імпульсів, причому два колійні датчики встановлені по краях платформи на відстані, що забезпечує їх замикання при наїзді коліс на платформу і розмикання при з'їзді, третій колійний датчик встановлений по центру платформи, зона контакту коліс з колійними датчиками більша відстані між крайніми і середніми датчиками, виходи всіх колійних датчиків з'єднані з тривхідним елементом АБО-НІ, входи крайніх колійних датчиків з'єднані з входами вузла визначення напрямку і входами S першого і другого RS-тригерів, виходи яких з'єднані з входами першого елемента АБО, вихід першого елемента АБО з'єднаний з входом С першого D-тригера, вихід якого послідовно через перший і другий формувачі імпульсів з'єднаний з керуючим входом аналого-цифрового перетворювача, вихід середнього колійного датчика з'єднаний з установлювальним входом R другого D-тригера, вхід С якого підключений до виходу елемента АБО-НІ, а вихід з'єднаний із входом третього формувача імпульсів, вихід якого з'єднаний з першим входом другого елемента АБО, а його другий вхід підключений до ланцюга зовнішнього скидання, вихід другого елемента АБО з'єднаний з установлювальними входами R першого і другого RS-тригерів і першого D-тригера та з входом S другого D-тригера, довжина платформи дорівнює найменшій міжосьовій відстані вагонів, що зважуються.
Текст
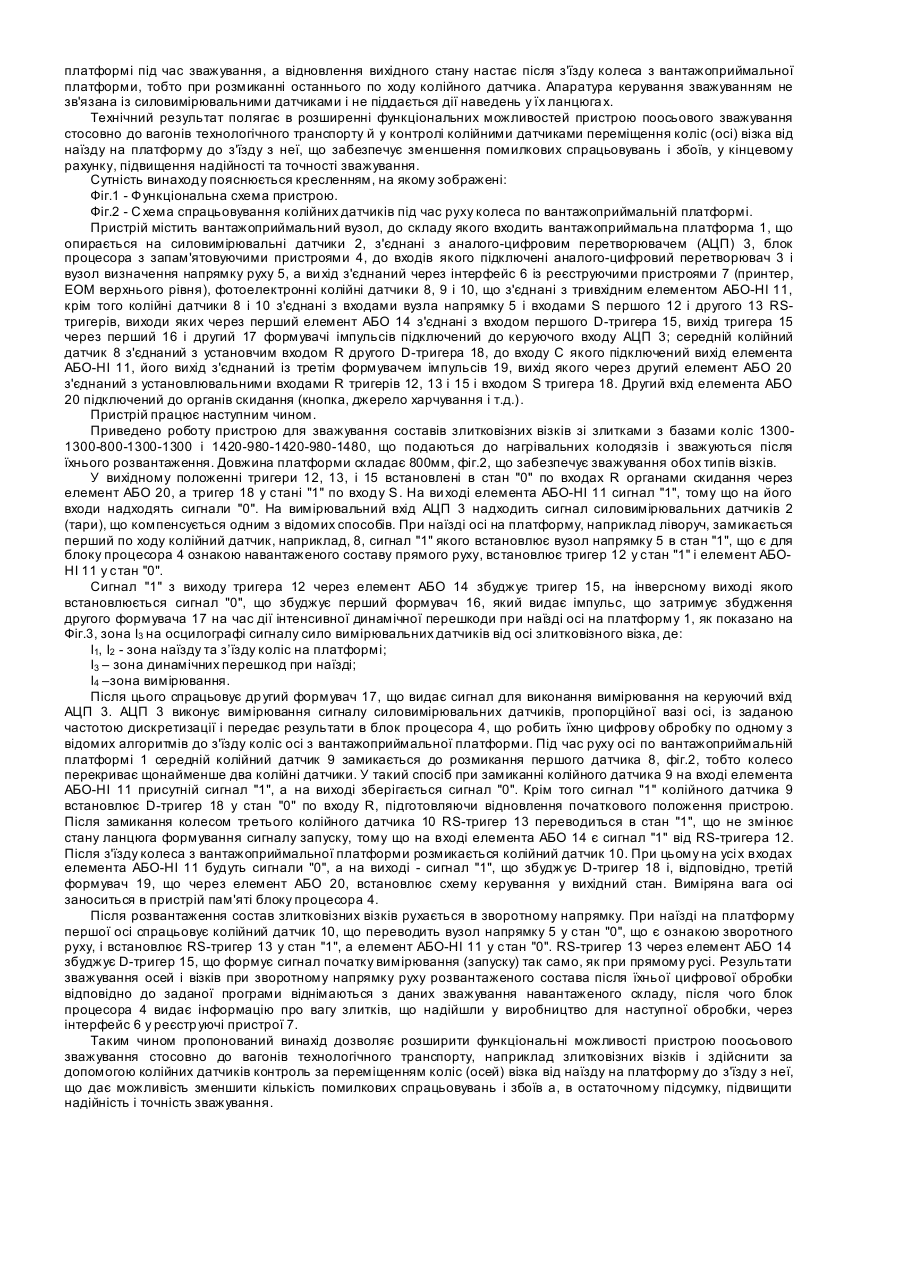
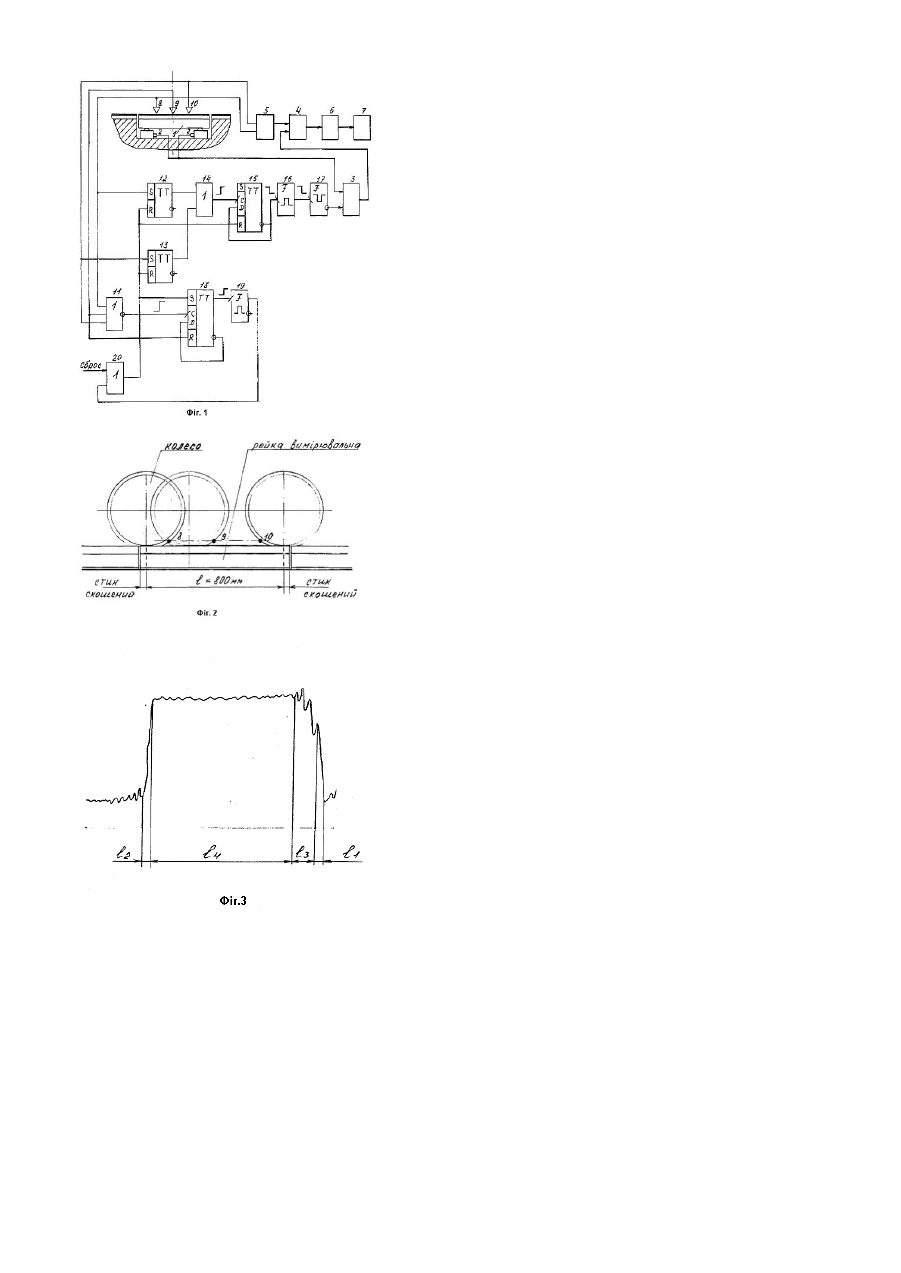
Пристрій відноситься до ваговимірювальної техніки і може бути використаний для зважування під час руху вагонів технологічного транспорту: візків для виливниць (злитковізних візків), чугоновозів, шлаковозів та ін. Відомий "Пристрій для зважування залізничного состава під час руху", авт. свід. СРСР №1613873 А1, G01G19/04, 15.12.90, Бюл. №46, що містить вантажоприймальну платформу з датчиком ваги, чотири колійні датчики, розташовані попарно симетрично відносно центра платформи, один із яких у кожній парі встановлений на під'їзній колії, схему визначення напрямку руху й обчислювальний блок . Недоліком відомого пристрою є обмежена область використання, тому що: 1. Розташування колійних датчиків у кожній парі на відстані більшій, ніж база ходового візка і меншій відстані між внутрішніми осями сусідніх візків, дозволяє поосьове зважування вагонів визначених типів (4х- і 6ти- осьових) і не може бути використане для вагонів технологічного транспорту, у яких база ходови х візків більша, ніж відстань між внутрішніми осями суміжних візків, наприклад для шестиосьових злитковізних візків з базою ходових візків 1420мм і відстанню між осями суміжних візків - 980мм та ін. 2. Пристрій застосовний для зважування составів при тязі, тобто локомотив повинен знаходитися поперед составу, тому що при формуванні сигналів і ознак використовуються шість осей локомотива, у той час як у промислових умовах локомотив може бути чо тирьохосьовим і знаходитися як перед, так і позад составу. Найбільш близьким по технічній сутності є "Спосіб поколесного зважування рухомих об'єктів", патент України №22542 А, МПК G01G19/04, 30.06.98, Бюлетень №3 (прототип), для реалізації якого передбачений вантажоприймальний пристрій, що містить платформу, що спирається на тензодатчики (силовимірювальні датчики), підключені до аналого-цифрових перетворювачів, виходи яких зв'язані з запам'ятовуючими пристроями, процесор з вузлом визначення напрямку руху, реєстр уючі пристрої, підключені через інтерфейс до процесора. Недоліки прототипу: 1. Спосіб і засоби для його реалізації придатні для зважування чотирьохосьових вагонів на двохосьових ходових візках з визначеною відстанню між осями (1800 чи 1850мм) і з повізковим алгоритмом обробки результатів зважування коліс (осей). При цьому відстань між внутрішніми осями ходових візків вагона, а також суміжних вагонів повинна бути більша довжини платформи (1950мм), оскільки обробка результатів зважування осей візка завершується при з'їзді з платформи її другої осі (до наїзду чергового візка). Цій умові не відповідають вагони технологічного транспорту, наприклад шестиосьового візка для виливниць і злитків (злитковізного візка), що мають три ходових візки з міжосьовою відстанню 1420мм і відстанню між осями суміжних візків 980мм, чи два трьохосьових візки з міжосьовою відстанню по 1300мм і відстанню між осями суміжних візків 800мм та інші варіанти. 2. Можливі збої і помилкові спрацьовування, тому що сигнали дозволу вимірювання, наявності об'єкта, визначення напрямку руху й інші формуються із сигналів силовимірювальних датчиків при наїздах і з'їздах коліс на платформу, під час яких мають місце динамічні завади високого рівня. Крім того імпульсні наведення промислових завад у лінії зв'язку датчиків з АЦП, що при усередненні сигналів за час виміру не вносять помітних перекручувань в результат через короткочасність їх дії, але можуть викликати помилкове спрацьовування при формуванні керуючих сигналів, що знижує надійність пристрою. В основу винаходу поставлена задача удосконалення пристрою для поосьового зважування вагонів технологічного транспорту під час руху шля хом введення сукупності нових конструктивних елементів, що дозволяють розширити область використання пристрою, а також зменшити кількість збоїв і помилкових спрацьовувань, що дозволить підвищити надійність і точність пристрою. Поставлена задача вирішується таким чином. У пристрої для пооосьового зважування вагонів технологічного транспорту під час руху, що містить вантажоприймальний вузол, який складається з платформи, що опирається на силовимірювальні датчики, підключені до аналого-цифрового перетворювача, вузол визначення напрямку руху, блок процесора з запам'ятовуючими пристроями, з входами якого з'єднані аналого-цифровий перетворювач і вузол визначення напрямку руху, а його вихід через інтерфейс з'єднаний із реєструючими пристроями, передбачені наступні відмінності: у нього введені три колійніі датчики, два RS-тригери, два елементи АБО, тривхідний елемент АБО-НІ, два D-тригери і три формувачі імпульсів, причому два колійні датчики встановлені по краях платформи на відстані, що забезпечує їхнє замикання при наїзді коліс на платформу і розмикання при з'їзді, третій колійний датчик встановлений по центру платформи, зона контакту коліс з колійними датчиками більша відстані між крайніми і середнім датчиком; виходи всіх колійних датчиків з'єднані з тривхідним елементом АБО-НІ, входи крайніх колійних датчиків з'єднані з входами вузла визначення напрямку і входами S першого і другого RSтригерів, виходи яких з'єднані з входами першого елемента АБО, вихід першого елемента АБО з'єднаний із входом С першого D-тригера, вихід якого послідовно через перший і другий формувачі імпульсів з'єднаний з керуючим входом аналого-цифрового перетворювача, вихід середнього колійного датчика з'єднаний з входом R другого D-тригера, вхід С якого підключений до виходу елемента АБО-НІ, а вихід з'єднаний із входом третього формувача імпульсів, вихід якого з'єднаний з першим входом другого елемента АБО, а його другий вхід підключений до ланцюга зовнішнього скидання, вихід другого елемента АБО з'єднаний з входами R першого і другого RS-тригерів і першого D-тригера і з входом S другого D-тригера; довжина платформи дорівнює найменшій відстані між осями вагонів, що зважуються. Між сукупністю ознак і технічним результатом, що досягається, існує наступний причинно-наслідковий зв'язок. Через те що вагони технологічного транспорту мають різну кількість ходових візків з різними міжосьовими відстанями і відстанями між осями суміжних візків, то довжина платформи обрана рівною найменшій міжосьовій відстані серед об'єктів зважування. При цьому всі осі мають однакову величину пробігу по платформі (однакову зону вимірювання), що спрощує алгоритм цифрової обробки сигналів силовимірювальних датчиків. Для повного використання довжини платформи при вимірюванні ваги осі два колійні датчики розташовані таким чином, що замикання (спрацьовування) першого з них у залежності від напрямку руху вагонів відбувається в момент наїзду коліс на платформу, а розмикання другого датчика в момент з'їзду. Третій колійний датчик встановлений по центру платформи. При цьому зона контакту колеса з колійним датчиком забезпечує під час руху колеса замикання наступного колійного датчика до розмикання попереднього. Під час переміщення коліс по вантажоприймальній платформі колійні датчики послідовно замикаються і розмикаються, але при цьому принаймні один з колійних датчиків замкнутий, завдяки чому вплив перешкод у лініях зв'язку не замкнутих датчиків не вносить змін у роботу схеми керування. У такий спосіб здійснюється контроль переміщення колеса по платформі під час зважування, а відновлення вихідного стану настає після з'їзду колеса з вантажоприймальної платформи, тобто при розмиканні останнього по ходу колійного датчика. Апаратура керування зважуванням не зв'язана із силовимірювальними датчиками і не піддається дії наведень у їх ланцюга х. Технічний результат полягає в розширенні функціональних можливостей пристрою поосьового зважування стосовно до вагонів технологічного транспорту й у контролі колійними датчиками переміщення коліс (осі) візка від наїзду на платформу до з'їзду з неї, що забезпечує зменшення помилкових спрацьовувань і збоїв, у кінцевому рахунку, підвищення надійності та точності зважування. Сутність винаходу пояснюється кресленням, на якому зображені: Фіг.1 - Функціональна схема пристрою. Фіг.2 - С хема спрацьовування колійних датчиків під час руху колеса по вантажоприймальній платформі. Пристрій містить вантажоприймальний вузол, до складу якого входить вантажоприймальна платформа 1, що опирається на силовимірювальні датчики 2, з'єднані з аналого-цифровим перетворювачем (АЦП) 3, блок процесора з запам'ятовуючими пристроями 4, до входів якого підключені аналого-цифровий перетворювач 3 і вузол визначення напрямку руху 5, а ви хід з'єднаний через інтерфейс 6 із реєструючими пристроями 7 (принтер, ЕОМ верхнього рівня), фотоелектронні колійні датчики 8, 9 і 10, що з'єднані з тривхідним елементом АБО-НІ 11, крім того колійні датчики 8 і 10 з'єднані з входами вузла напрямку 5 і входами S першого 12 і другого 13 RSтригерів, виходи яких через перший елемент АБО 14 з'єднані з входом першого D-тригера 15, вихід тригера 15 через перший 16 і другий 17 формувачі імпульсів підключений до керуючого входу АЦП 3; середній колійний датчик 8 з'єднаний з установчим входом R другого D-тригера 18, до входу С якого підключений вихід елемента АБО-НІ 11, його вихід з'єднаний із третім формувачем імпульсів 19, вихід якого через другий елемент АБО 20 з'єднаний з установлювальними входами R тригерів 12, 13 і 15 і входом S тригера 18. Другий вхід елемента АБО 20 підключений до органів скидання (кнопка, джерело харчування і т.д.). Пристрій працює наступним чином. Приведено роботу пристрою для зважування составів злитковізних візків зі злитками з базами коліс 13001300-800-1300-1300 і 1420-980-1420-980-1480, що подаються до нагрівальних колодязів і зважуються після їхнього розвантаження. Довжина платформи складає 800мм, фіг.2, що забезпечує зважування обох типів візків. У вихідному положенні тригери 12, 13, і 15 встановлені в стан "0" по входах R органами скидання через елемент АБО 20, а тригер 18 у стані "1" по входу S. На ви ході елемента АБО-НІ 11 сигнал "1", тому що на його входи надходять сигнали "0". На вимірювальний вхід АЦП 3 надходить сигнал силовимірювальних датчиків 2 (тари), що компенсується одним з відомих способів. При наїзді осі на платформу, наприклад ліворуч, замикається перший по ходу колійний датчик, наприклад, 8, сигнал "1" якого встановлює вузол напрямку 5 в стан "1", що є для блоку процесора 4 ознакою навантаженого составу прямого руху, встановлює тригер 12 у стан "1" і елемент АБОНІ 11 у стан "0". Сигнал "1" з виходу тригера 12 через елемент АБО 14 збуджує тригер 15, на інверсному виході якого встановлюється сигнал "0", що збуджує перший формувач 16, який видає імпульс, що затримує збудження другого формувача 17 на час дії інтенсивної динамічної перешкоди при наїзді осі на платформу 1, як показано на Фіг.3, зона І3 на осцилографі сигналу сило вимірювальних датчиків від осі злитковізного візка, де: І1, І2 - зона наїзду та з’їзду коліс на платформі; І3 – зона динамічних перешкод при наїзді; І4 –зона вимірювання. Після цього спрацьовує др угий формувач 17, що видає сигнал для виконання вимірювання на керуючий вхід АЦП 3. АЦП 3 виконує вимірювання сигналу силовимірювальних датчиків, пропорційної вазі осі, із заданою частотою дискретизації і передає результати в блок процесора 4, що робить їхню цифрову обробку по одному з відомих алгоритмів до з'їзду коліс осі з вантажоприймальної платформи. Під час руху осі по вантажоприймальній платформі 1 середній колійний датчик 9 замикається до розмикання першого датчика 8, фіг.2, тобто колесо перекриває щонайменше два колійні датчики. У такий спосіб при замиканні колійного датчика 9 на вході елемента АБО-НІ 11 присутній сигнал "1", а на виході зберігається сигнал "0". Крім того сигнал "1" колійного датчика 9 встановлює D-тригер 18 у стан "0" по входу R, підготовляючи відновлення початкового положення пристрою. Після замикання колесом третього колійного датчика 10 RS-тригер 13 переводиться в стан "1", що не змінює стану ланцюга формування сигналу запуску, тому що на вході елемента АБО 14 є сигнал "1" від RS-тригера 12. Після з'їзду колеса з вантажоприймальної платформи розмикається колійний датчик 10. При цьому на усі х входах елемента АБО-НІ 11 будуть сигнали "0", а на виході - сигнал "1", що збудж ує D-тригер 18 і, відповідно, третій формувач 19, що через елемент АБО 20, встановлює схему керування у вихідний стан. Виміряна вага осі заноситься в пристрій пам'яті блоку процесора 4. Після розвантаження состав злитковізних візків рухається в зворотному напрямку. При наїзді на платформу першої осі спрацьовує колійний датчик 10, що переводить вузол напрямку 5 у стан "0", що є ознакою зворотного руху, і встановлює RS-тригер 13 у стан "1", а елемент АБО-НІ 11 у стан "0". RS-тригер 13 через елемент АБО 14 збуджує D-тригер 15, що формує сигнал початку вимірювання (запуску) так само, як при прямому русі. Результати зважування осей і візків при зворотному напрямку руху розвантаженого состава після їхньої цифрової обробки відповідно до заданої програми віднімаються з даних зважування навантаженого складу, після чого блок процесора 4 видає інформацію про вагу злитків, що надійшли у виробництво для наступної обробки, через інтерфейс 6 у реєстр уючі пристрої 7. Таким чином пропонований винахід дозволяє розширити функціональні можливості пристрою поосьового зважування стосовно до вагонів технологічного транспорту, наприклад злитковізних візків і здійснити за допомогою колійних датчиків контроль за переміщенням коліс (осей) візка від наїзду на платформу до з'їзду з неї, що дає можливість зменшити кількість помилкових спрацьовувань і збоїв а, в остаточному підсумку, підвищити надійність і точність зважування.
ДивитисяДодаткова інформація
Назва патенту англійськоюWeigher for axis-by-axis weighing of vehicles in motion
Автори англійськоюSytyi Volodymyr Ivanovych, Lisovyi Vitalii Vasyliovych, Razdobarov Viktor Heorhiyovych, Satsiuk Valeriy Ivanovych, Chakov Oleksandr Mykolayovych
Назва патенту російськоюВесы для поосного взвешивания технологических транспортных средств при движении
Автори російськоюСытый Владимир Иванович, Лисовый Виталий Васильевич, Раздобаров Виктор Георгиевич, Сацюк Валерий Иванович, Чаков Александр Николаевич
МПК / Мітки
МПК: B60S 5/00, G01G 19/00
Мітки: руху, пристрій, вагонів, поосьового, зважування, технологічного, транспорту
Код посилання
<a href="https://ua.patents.su/3-67937-pristrijj-dlya-poosovogo-zvazhuvannya-vagoniv-tekhnologichnogo-transportu-pid-chas-rukhu.html" target="_blank" rel="follow" title="База патентів України">Пристрій для поосьового зважування вагонів технологічного транспорту під час руху</a>
Пристрій для зважування залізничних вагонів під час руху
Номер патенту: 38424
Опубліковано: 15.05.2001
Автори: Раздобаров Віктор Георгійович, Павлець Олексій Гаврилович, Чаков Олександр Миколайович, Лісовий Віталій Васильович, Сацюк Валерій Іванович
МПК: G06F 7/00, G01G 19/04
Мітки: пристрій, вагонів, руху, зважування, залізничних
Формула / Реферат:
Пристрій для зважування залізничних вагонів під час руху, до складу якого входить вантажоприймальна платформа з ваговимірювальними датчиками, підключеними через вхідний блок до аналого-цифрового перетворювача, вихід якого підключений до інформаційного входу обчислювального блоку, чотири шляхові датчики, що розташовані попарно симетрично відносно центру вантажоприймальної платформи, виходи яких через блок сполучення з'єднані з входами...
Низькопрофільні автомобільні ваги для поосьового зважування автотранспорту під час руху
Номер патенту: 65851
Опубліковано: 15.04.2004
Автори: Браз Давид Леонідович, Кулик Сергій Федорович, Альтман Ілля Аронович
МПК: G01G 19/02, B60P 5/00
Мітки: поосьового, низькопрофільні, зважування, руху, автомобільні, автотранспорту, ваги
Формула / Реферат:
1. Низькопрофільні автомобільні ваги для поосьового зважування автотранспорту під час руху (зокрема, автомобілів і автопоїздів), що містять вантажоприймальну платформу, яка спирається на вмонтовані у вагові модулі тензодатчики, елементи під'їзних шляхів для в'їзду й з'їзду з ваг автомобілів і автопоїздів, що примикають до вантажоприймальної платформи, виконані у вигляді горизонтально розташованих жорстких стаціонарних конструкцій (плит), які...
Пристрій для зважування залізничних составів під час руху
Номер патенту: 38561
Опубліковано: 15.05.2001
Автори: Чаков Олександр Миколайович, Лісовий Віталій Васильович, Павлець Олексій Гаврилович, Раздобаров Віктор Георгійович, Сацюк Валерій Іванович
МПК: G01G 19/04
Мітки: залізничних, зважування, руху, пристрій, составів
Формула / Реферат:
(21) 2000074480(54) (57)Дата прийняттярішення31.01.2001 р.Пристрій для зважування залізничних составів під час руху, до складу якого входить вантажоприймальна платформа з ваговимірювальними датчиками, чотири шляхові датчики, розміщені попарно симетрично відносно центру вантажоприймальної платформи, котрі з'єднані через блок спряження з вузлом напрямку руху і мультиплексором і обчислювальний блок, причому...
Пристрій для повізкового зважування залізничних вагонів
Номер патенту: 60679
Опубліковано: 15.10.2003
Автори: Чаков Олександр Миколайович, Лісовий Віталій Васильович, Сацюк Валерій Іванович, Архіпов Олександр Миколайович, Раздобаров Віктор Георгійович, Павлець Олексій Гаврилович, Нагіх Констянтин Валерійович
МПК: G01G 5/00, G06G 7/00, G01G 19/04
Мітки: залізничних, пристрій, повізкового, зважування, вагонів
Формула / Реферат:
Пристрій для повізкового зважування залізничних вагонів, який містить вантажопрймальну платформу з ваговимірювальними датчиками, підключеними до вхідного блока, вихід якого з'єднаний з входом аналого-цифрового перетворювача (АЦП), вихід якого підключений до інформаційного входу обчислювального блока, з'єднаного з термінальною апаратурою, шляхові датчики, що підключені через формуючі підсилювачі до блока ідентифікації візків вагонів, який...
Пристрій для поосьового зважування транспортних засобів
Номер патенту: 21312
Опубліковано: 02.12.1997
Автор: Нікітінський Михайло Павлович
МПК: G01G 19/04
Мітки: пристрій, поосьового, транспортних, засобів, зважування
Формула / Реферат:
Устройство для поосного взвешивания транспортных средств, содержащее двутавры, на которых образованы грузоприемные участки с тензодатчиками, установленными в стенках двутавров в зонах нейтральных плоскостей и связанными с блоками индикации и регистрации, расположенные на двутаврах элементы для наезда траснпортного средства, отличающееся тем, что тензодатчики, образующие измерительный участок устройства, установлены друг от друга на...
Попередній патент: Спосіб лікування ендокринної неплідності
Наступний патент: Пристрій для видалення продуктів флотації
Випадковий патент: Акустичний блок для ультразвукового контролю