Ваговий пристрій для гідравлічного навантажувача

Формула / Реферат
Ваговий пристрій для гідравлічного навантажувача, який містить дискретний датчик положення стріли, датчик тиску на вході та датчик тиску на виході гідравлічного циліндра підйому стріли, процесорний блок, енергонезалежну пам'ять, індикатор та клавіатуру, при цьому виходи всіх датчиків, індикатора та клавіатури підключені до відповідних входів та виходів процесорного блока, який відрізняється тим, що додатково має шаблон вимірювального інтервалу, який встановлений на стрілі навантажувача, при цьому датчик положення стріли встановлений на станині навантажувача, або шаблон вимірювального інтервалу встановлений на станині навантажувача, при цьому датчик положення стріли встановлений на стрілі навантажувача.
Текст
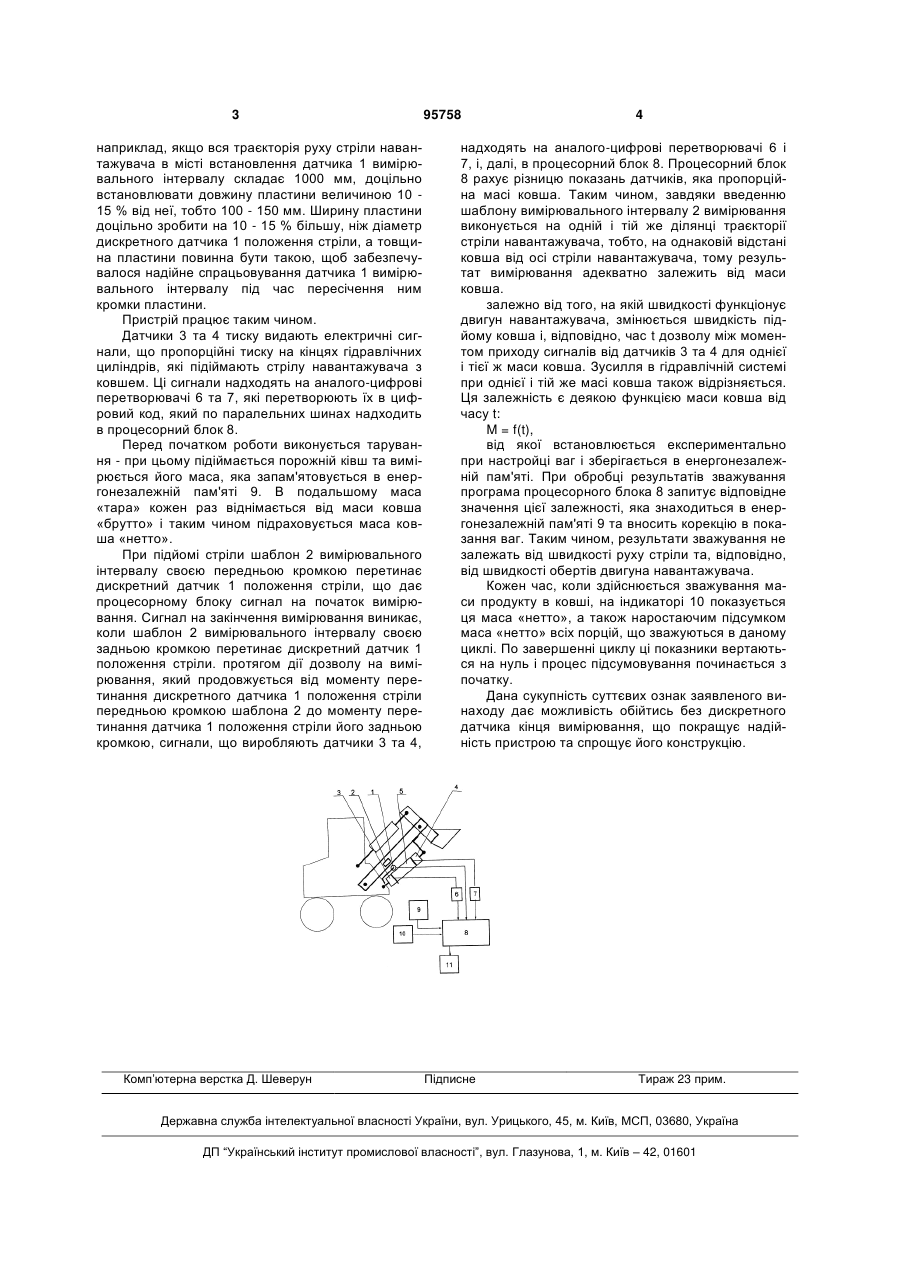
Ваговий пристрій для гідравлічного навантажувача, який містить дискретний датчик положен 3 наприклад, якщо вся траєкторія руху стріли навантажувача в місті встановлення датчика 1 вимірювального інтервалу складає 1000 мм, доцільно встановлювати довжину пластини величиною 10 15 % від неї, тобто 100 - 150 мм. Ширину пластини доцільно зробити на 10 - 15 % більшу, ніж діаметр дискретного датчика 1 положення стріли, а товщина пластини повинна бути такою, щоб забезпечувалося надійне спрацьовування датчика 1 вимірювального інтервалу під час пересічення ним кромки пластини. Пристрій працює таким чином. Датчики 3 та 4 тиску видають електричні сигнали, що пропорційні тиску на кінцях гідравлічних циліндрів, які підіймають стрілу навантажувача з ковшем. Ці сигнали надходять на аналого-цифрові перетворювачі 6 та 7, які перетворюють їх в цифровий код, який по паралельних шинах надходить в процесорний блок 8. Перед початком роботи виконується тарування - при цьому підіймається порожній ківш та вимірюється його маса, яка запам'ятовується в енергонезалежній пам'яті 9. В подальшому маса «тара» кожен раз віднімається від маси ковша «брутто» і таким чином підраховується маса ковша «нетто». При підйомі стріли шаблон 2 вимірювального інтервалу своєю передньою кромкою перетинає дискретний датчик 1 положення стріли, що дає процесорному блоку сигнал на початок вимірювання. Сигнал на закінчення вимірювання виникає, коли шаблон 2 вимірювального інтервалу своєю задньою кромкою перетинає дискретний датчик 1 положення стріли. протягом дії дозволу на вимірювання, який продовжується від моменту перетинання дискретного датчика 1 положення стріли передньою кромкою шаблона 2 до моменту перетинання датчика 1 положення стріли його задньою кромкою, сигнали, що виробляють датчики 3 та 4, Комп’ютерна верстка Д. Шеверун 95758 4 надходять на аналого-цифрові перетворювачі 6 і 7, і, далі, в процесорний блок 8. Процесорний блок 8 рахує різницю показань датчиків, яка пропорційна масі ковша. Таким чином, завдяки введенню шаблону вимірювального інтервалу 2 вимірювання виконується на одній і тій же ділянці траєкторії стріли навантажувача, тобто, на однаковій відстані ковша від осі стріли навантажувача, тому результат вимірювання адекватно залежить від маси ковша. залежно від того, на якій швидкості функціонує двигун навантажувача, змінюється швидкість підйому ковша і, відповідно, час t дозволу між моментом приходу сигналів від датчиків 3 та 4 для однієї і тієї ж маси ковша. Зусилля в гідравлічній системі при однієї і тій же масі ковша також відрізняється. Ця залежність є деякою функцією маси ковша від часу t: M = f(t), від якої встановлюється експериментально при настройці ваг і зберігається в енергонезалежній пам'яті. При обробці результатів зважування програма процесорного блока 8 запитує відповідне значення цієї залежності, яка знаходиться в енергонезалежній пам'яті 9 та вносить корекцію в показання ваг. Таким чином, результати зважування не залежать від швидкості руху стріли та, відповідно, від швидкості обертів двигуна навантажувача. Кожен час, коли здійснюється зважування маси продукту в ковші, на індикаторі 10 показується ця маса «нетто», а також наростаючим підсумком маса «нетто» всіх порцій, що зважуються в даному циклі. По завершенні циклу ці показники вертаються на нуль і процес підсумовування починається з початку. Дана сукупність суттєвих ознак заявленого винаходу дає можливість обійтись без дискретного датчика кінця вимірювання, що покращує надійність пристрою та спрощує його конструкцію. Підписне Тираж 23 прим. Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюWeighting device for hydraulic loader
Автори англійськоюBUHAIENKO HEORHII YAKOVYCH
Назва патенту російськоюВесовое устройство для гидравлического погрузчика
Автори російськоюБУГАЕНКО ГЕОРГИЙ ЯКОВЛЕВИЧ
МПК / Мітки
МПК: G01G 19/10
Мітки: пристрій, навантажувача, ваговий, гідравлічного
Код посилання
<a href="https://ua.patents.su/2-95758-vagovijj-pristrijj-dlya-gidravlichnogo-navantazhuvacha.html" target="_blank" rel="follow" title="База патентів України">Ваговий пристрій для гідравлічного навантажувача</a>
Ваговий пристрій для гідравлічного навантажувача

Номер патенту: 94665
Опубліковано: 25.05.2011
Автор: Бугаєнко Георгій Якович
МПК: G01G 19/40, G01G 19/08, G06F 19/00
Мітки: навантажувача, пристрій, ваговий, гідравлічного
Формула / Реферат:
Ваговий пристрій для гідравлічного навантажувача, який містить датчики тиску, що через гідравлічні з'єднувачі підключені до нагнітаючого та вихлопного входів гідравлічних циліндрів, які підіймають стрілу навантажувача, аналого-цифрові перетворювачі, до входів яких підключені виходи датчиків тиску, виходи яких підведені до входу процесорного блока, датчик кута нахилу, який вимірює кут нахилу навантажувача відносно горизонту, вихід якого...
Ваговий пристрій для гідравлічного навантажувача
Номер патенту: 88589
Опубліковано: 26.10.2009
Автор: Бугаєнко Георгій Якович
МПК: G01G 19/00
Мітки: пристрій, ваговий, гідравлічного, навантажувача
Формула / Реферат:
1. Ваговий пристрій для гідравлічного навантажувача, який містить датчики тиску, аналого-цифрові перетворювачі, до входів яких підключені виходи датчиків тиску, а виходи яких підведені до входу процесорного блоку, датчик кута нахилу, який вимірює кут нахилу навантажувача відносно горизонту, вихід якого підведений до входу процесорного блоку, який обробляє сигнали датчиків тиску і датчика кута нахилу та підраховує масу вантажу у ковші, пам'ять...
Спосіб дозування у ваговому пристрої для гідравлічного навантажувача

Номер патенту: 59735
Опубліковано: 25.05.2011
Автори: Карпов Константин Вікторович, Бугаєнко Георгій Якович, Тумайкін Вячеслав Володимирович
МПК: G01G 19/10
Мітки: навантажувача, ваговому, гідравлічного, дозування, пристрої, спосіб
Формула / Реферат:
Спосіб дозування у ваговому пристрої для гідравлічного навантажувача, який полягає в тому, що вимір величини зусилля, яке виникає при підйомі стріли навантажувача, виконують шляхом обробки сигналів на виході датчиків тиску у проміжок часу між сигналом на виході дискретного датчика початку вимірювання та сигналом на виході дискретного датчика кінця вимірювання, перед відвантаженням чергової дози оператор-водій навантажувача з клавіатури...
Стріла переднього фронтального навантажувача гідравлічного колісного екскаватора
Номер патенту: 19804
Опубліковано: 15.12.2006
Автори: Романьков Олександр Іванович, Бондарчук Олександр Петрович, Васьковський Петро Петрович, Поздняков Володимир Олександрович
МПК: E02F 3/32
Мітки: стріла, фронтального, переднього, гідравлічного, екскаватора, навантажувача, колісного
Формула / Реферат:
Стріла фронтального навантажувача гідравлічного колісного екскаватора, що містить дві поздовжні фігурні балки, з’єднані між собою поперечною коробчастою балкою, кінці якої скріплені косинками, у поздовжні фігурні балки вварено втулки для під'єднання стріли відповідно до порталів несучої рами екскаватора ковша, важільної системи керування ковшем і стрілою, яка відрізняється тим, що поздовжні фігурні балки виконано коробчастими і вони...
Портал фронтального навантажувача
Номер патенту: 19816
Опубліковано: 15.12.2006
Автори: Бондарчук Олександр Петрович, Позняков Володимир Олександрович, Васьковський Петро Петрович, Романьков Олександр Іванович
МПК: E02F 3/76
Мітки: портал, фронтального, навантажувача
Формула / Реферат:
Портал фронтального навантажувача, що складається з двох вертикальних стояків, кожний з яких містить дві фігурні листові боковини різної довжини, що зварені між собою листовими вставками та гнутими листовими вставками, у верхніх частинах фігурних листових боковин приварені внакладку листові фігурні пластини, у фігурних листових боковинах та листових фігурних пластинах виконані співвісно отвори, а у фігурних листових боковинах виконані також...
Попередній патент: Пристрій захисту від впливу асинхронного двигуна на точку короткого замикання в кабелі живлення
Наступний патент: Пристрій для транспортування та очистки коренебульбоплодів
Випадковий патент: Гумова суміш для шумопоглинаючого матеріалу