Ваговий пристрій для гідравлічного навантажувача
Формула / Реферат
1. Ваговий пристрій для гідравлічного навантажувача, який містить датчики тиску, аналого-цифрові перетворювачі, до входів яких підключені виходи датчиків тиску, а виходи яких підведені до входу процесорного блоку, датчик кута нахилу, який вимірює кут нахилу навантажувача відносно горизонту, вихід якого підведений до входу процесорного блоку, який обробляє сигнали датчиків тиску і датчика кута нахилу та підраховує масу вантажу у ковші, пам'ять з автономним живленням, яка зберігає результати лічення маси вантажу, електричний інтерфейс для підключення до живлення, електронний інтерфейс для передачі вагових даних та клавіатуру, який відрізняється тим, що містить дискретний датчик початку вимірювання та дискретний датчик кінця вимірювання, при цьому виходи зазначених дискретних датчиків підключені до відповідних дискретних входів процесорного блока.
2. Пристрій за п. 1, який відрізняється тим, що додатково містить дискретний датчик положення ковша та індикатор, при цьому вихід дискретного датчика положення ковша підключений до дискретного входу процесорного блоку, а паралельні виходи індикатора та клавіатури з'єднані з відповідними входами процесорного блоку.
Текст
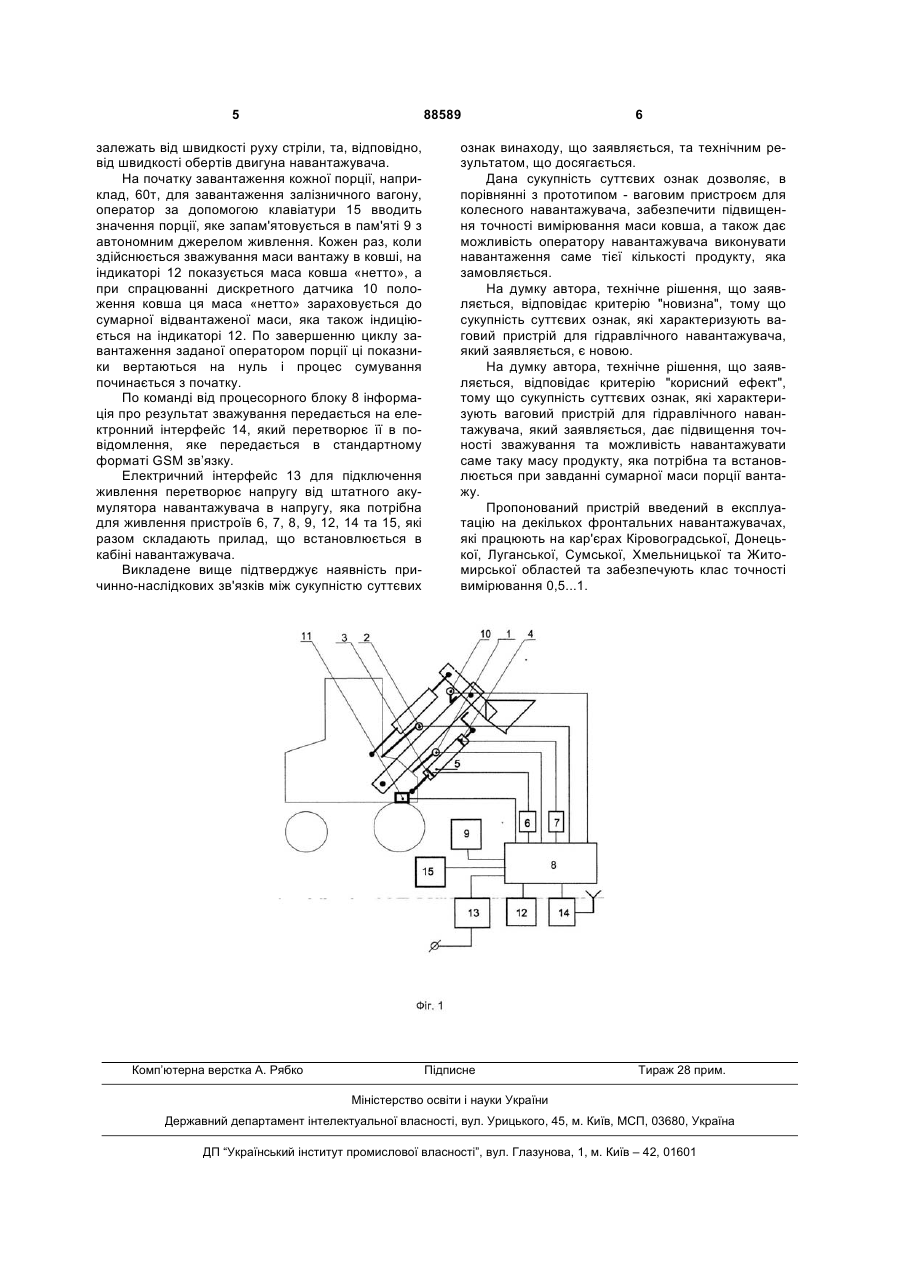
1. Ваговий пристрій для гідравлічного навантажувача, який містить датчики тиску, аналогоцифрові перетворювачі, до входів яких підключені виходи датчиків тиску, а виходи яких підведені до входу процесорного блоку, датчик кута нахилу, C2 1 3 інтерфейс для підключення до живлення, та електронний інтерфейс для передачі даних про вагу. Недоліками цього пристрою є, по перше, залежність результатів зважування від швидкості руху стріли навантажувача, що суттєво знижує точність вимірювання, а, по друге, неможливість підрахування сумарної маси порцій продукту, які перевантажується ковшем навантажувача у зв'язку з відсутністю закладів для цього підрахування. Метою винаходу є підвищення точності вимірювання маси вантажу, що підіймається навантажувачем, шляхом виміру швидкості руху стріли навантажувача під час зважування та корегування результатів зважування в залежності від фактичної швидкості. Метою є також підрахування сумарної маси порцій продукту, які перевантажується ковшем навантажувача, що дає можливість оператору навантажувача виконувати навантаження саме тієї кількості продукту, яка замовляється. Поставлена мета досягається тим, що в пристрій, який містить датчики тиску, що через гідравлічні з’єднувачі підключені до нагнітаючого та вихлопного входів гідравлічних циліндрів, які підіймають стрілу навантажувача, аналогоцифрові перетворювачі, до входів яких підключені виходи датчиків тиску, а виходи яких підведені до входу процесорного блоку, датчик кута нахилу, який вимірює кут нахилу навантажувача відносно горизонту, вихід якого підведений до входу процесорного блоку, який обробляє сигнали датчиків тиску датчика кута нахилу та рахує масу вантажу у ковші, пам'ять з автономним джерелом живлення, яка зберігає результати підрахування маси вантажу, електричний інтерфейс для підключення до живлення, та електронний інтерфейс для передачі даних про вагу, введені дискретний датчик початку вимірювання, дискретний датчик кінця вимірювання, дискретний датчик положення ковша, клавіатура та індикатор результатів зважування кожного ковша та сумарної відвантаженої маси. При цьому виходи всіх дискретних датчиків підключені до входу процесорного блока. К першому паралельному виходу процесорного блоку підключений індикатор, який індиціює масу кожного ковша та сумарну масу відвантаженого продукту, а до другого паралельного входу підключена клавіатура. Введення дискретного датчика початку вимірювання та дискретного датчика кінця вимірювання дає можливість уникнути впливу швидкості руху стріли на точність вимірювання маси продукту в ковші шляхом вимірювання цієї швидкості та корегування результатів вимірювання в залежності від виміряної швидкості. Введення дискретного датчика зачиненого положення ковша та індикатора дає можливість виконувати навантаження саме тієї кількості продукту, яка замовляється, шляхом зарахування маси продукту у кожному ковші до сумарної маси саме в той момент, коли спрацьовує цей датчик. Введення клавіатури дає можливість вводити значення порції, яка відвантажується навантажувачем, та виконувати операції за для настройки ваг. Загальний вигляд пристрою, що пропонується, відображений на Фіг.1. 88589 4 Пристрій, що пропонується, має дискретний датчик 1 початку вимірювання, та дискретний датчик 2 кінця вимірювання, що закріплені на корпусі навантажувача та встановлені на траєкторії руху стріли навантажувача, два тензометричні датчика тиску, один з яких - датчик 3 встановлений на вході, а другий - датчик 4 - на виході гідравлічного циліндру 5, два аналого-цифрових перетворювача 6 і 7, процесорний блок 8, пам'ять 9 з автономним джерелом живлення, дискретний датчик 10 положення ковша, датчик 11 кута нахилу навантажувача, індикатор 12, електричний інтерфейс 13 для підключення живлення, електронний інтерфейс 14 для передачі вагових даних по радіоканалу або по каналу GSM та клавіатура 15. Пристрій працює таким чином. Датчики 3 та 4 тиску видають електричні сигнали, пропорціональні тиску на кінцях гідравлічних циліндрів, які підіймають стрілу навантажувача з ковшем. Ці сигнали поступають на аналогоцифрові перетворювачі 6 та 7, які перетворюють їх в цифровий код, який по паралельних шинах поступає в процесорний блок 8. При підйомі стріли дискретний датчик 1 початку вимірювання дає процесорному блоку 8 сигнал на початок вимірювання, а сигнал на закінчення вимірювання дає дискретний датчик 2 кінця вимірювання. На протязі дії дозволу на вимірювання сигнали, які виробляють тензометричні датчики 3 та 4, поступають на аналого-цифрові перетворювачі, і, далі, в процесорний блок 8. Процесорний блок 8 рахує різницю показань датчиків, яка пропорційна масі ковша. Перед початком роботи виконується тарування - при цьому підіймається порожній ківш та вимірюється його маса, яка запам'ятовується в пам'яті 9 з автономним джерелом живлення. В подальшому маса «тара» кожен раз відіймається від маси ковша «брутто» і таким чином підраховується маса ковша «нетто». Таким чином, завдяки введенню дискретного датчика 1 початку вимірювання та дискретного датчика 2 кінця вимірювання процес вимірювання виконується на одній і той же дільниці траєкторії стріли навантажувача, тобто, на однаковій відстані ковша від осі стріли навантажувача, тому результат вимірювання адекватно залежить від маси ковша. В залежності від того, на якої швидкості функціонує двигун навантажувача, змінюється швидкість підйому ковша і, відповідно, час t дозволу між моментом приходу сигналів від датчиків 3 та 4 для однієї і той же маси ковша. Зусилля в гідравлічній системі при однієї і той же масі ковша також відрізняється. Ця залежність є деякою функцією маси ковша від часу t: Μ=f(t), від якої встановлюється експериментально при настройці ваг і зберігається в пам'яті 9 з автономним джерелом живлення. При підрахуванні маси ковша у конкретному його підйомі програма процесорного блоку 8 запрошує конкретне значення величини t, яка відповідає цьому зважуванню, та підраховує значення маси ковша Μ згідно з функцією f(t), вносячи, таким чином, корекцію в показання ваг. В результаті підсумок зважування не 5 88589 залежать від швидкості руху стріли, та, відповідно, від швидкості обертів двигуна навантажувача. На початку завантаження кожної порції, наприклад, 60т, для завантаження залізничного вагону, оператор за допомогою клавіатури 15 вводить значення порції, яке запам'ятовується в пам'яті 9 з автономним джерелом живлення. Кожен раз, коли здійснюється зважування маси вантажу в ковші, на індикаторі 12 показується маса ковша «нетто», а при спрацюванні дискретного датчика 10 положення ковша ця маса «нетто» зараховується до сумарної відвантаженої маси, яка також індиціюється на індикаторі 12. По завершенню циклу завантаження заданої оператором порції ці показники вертаються на нуль і процес сумування починається з початку. По команді від процесорного блоку 8 інформація про результат зважування передається на електронний інтерфейс 14, який перетворює її в повідомлення, яке передається в стандартному форматі GSM зв’язку. Електричний інтерфейс 13 для підключення живлення перетворює напругу від штатного акумулятора навантажувача в напругу, яка потрібна для живлення пристроїв 6, 7, 8, 9, 12, 14 та 15, які разом складають прилад, що встановлюється в кабіні навантажувача. Викладене вище підтверджує наявність причинно-наслідкових зв'язків між сукупністю суттєвих Комп’ютерна верстка А. Рябко 6 ознак винаходу, що заявляється, та технічним результатом, що досягається. Дана сукупність суттєвих ознак дозволяє, в порівнянні з прототипом - ваговим пристроєм для колесного навантажувача, забезпечити підвищення точності вимірювання маси ковша, а також дає можливість оператору навантажувача виконувати навантаження саме тієї кількості продукту, яка замовляється. На думку автора, технічне рішення, що заявляється, відповідає критерію "новизна", тому що сукупність суттєвих ознак, які характеризують ваговий пристрій для гідравлічного навантажувача, який заявляється, є новою. На думку автора, технічне рішення, що заявляється, відповідає критерію "корисний ефект", тому що сукупність суттєвих ознак, які характеризують ваговий пристрій для гідравлічного навантажувача, який заявляється, дає підвищення точності зважування та можливість навантажувати саме таку масу продукту, яка потрібна та встановлюється при завданні сумарної маси порції вантажу. Пропонований пристрій введений в експлуатацію на декількох фронтальних навантажувачах, які працюють на кар'єрах Кіровоградської, Донецької, Луганської, Сумської, Хмельницької та Житомирської областей та забезпечують клас точності вимірювання 0,5...1. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюWeighting device for hydraulic loader
Автори англійськоюBuhaienko Heorhii Yakovych
Назва патенту російськоюВесовое устройство для гидравлического погрузчика
Автори російськоюБугаенко Георгий Яковлевич
МПК / Мітки
МПК: G01G 19/00
Мітки: гідравлічного, ваговий, пристрій, навантажувача
Код посилання
<a href="https://ua.patents.su/3-88589-vagovijj-pristrijj-dlya-gidravlichnogo-navantazhuvacha.html" target="_blank" rel="follow" title="База патентів України">Ваговий пристрій для гідравлічного навантажувача</a>
Стріла переднього фронтального навантажувача гідравлічного колісного екскаватора
Номер патенту: 19804
Опубліковано: 15.12.2006
Автори: Васьковський Петро Петрович, Поздняков Володимир Олександрович, Бондарчук Олександр Петрович, Романьков Олександр Іванович
МПК: E02F 3/32
Мітки: переднього, навантажувача, екскаватора, фронтального, стріла, гідравлічного, колісного
Формула / Реферат:
Стріла фронтального навантажувача гідравлічного колісного екскаватора, що містить дві поздовжні фігурні балки, з’єднані між собою поперечною коробчастою балкою, кінці якої скріплені косинками, у поздовжні фігурні балки вварено втулки для під'єднання стріли відповідно до порталів несучої рами екскаватора ковша, важільної системи керування ковшем і стрілою, яка відрізняється тим, що поздовжні фігурні балки виконано коробчастими і вони...
Ваговий гігрометр
Номер патенту: 14726
Опубліковано: 04.02.1997
Автор: Лозбін Віктор Іванович
МПК: G01W 1/00
Формула / Реферат:
Ваговий гігрометр, що містить терези, який відрізняється тим, що він додатково оснащений розміщеними на плечах терезів реверсивними тепловими насосами, наприклад, термоелектричними батареями, з поверхнями для конденсації вологи, принаймні одним датчиком відхилення терезів, під'єднаним до реверсивного теплового насосу та блоку обробки інформації, з яким зв'язані таймер і датчик температури, а терези обладнані демпфером.
Ваговий пристрій
Номер патенту: 9013
Опубліковано: 30.09.1996
Автори: Альтман Ілья Аронович, Білоголовський Микола Федорович, Стебновський Віктор Цезаревич, Плотник Павло Семенович
Формула / Реферат:
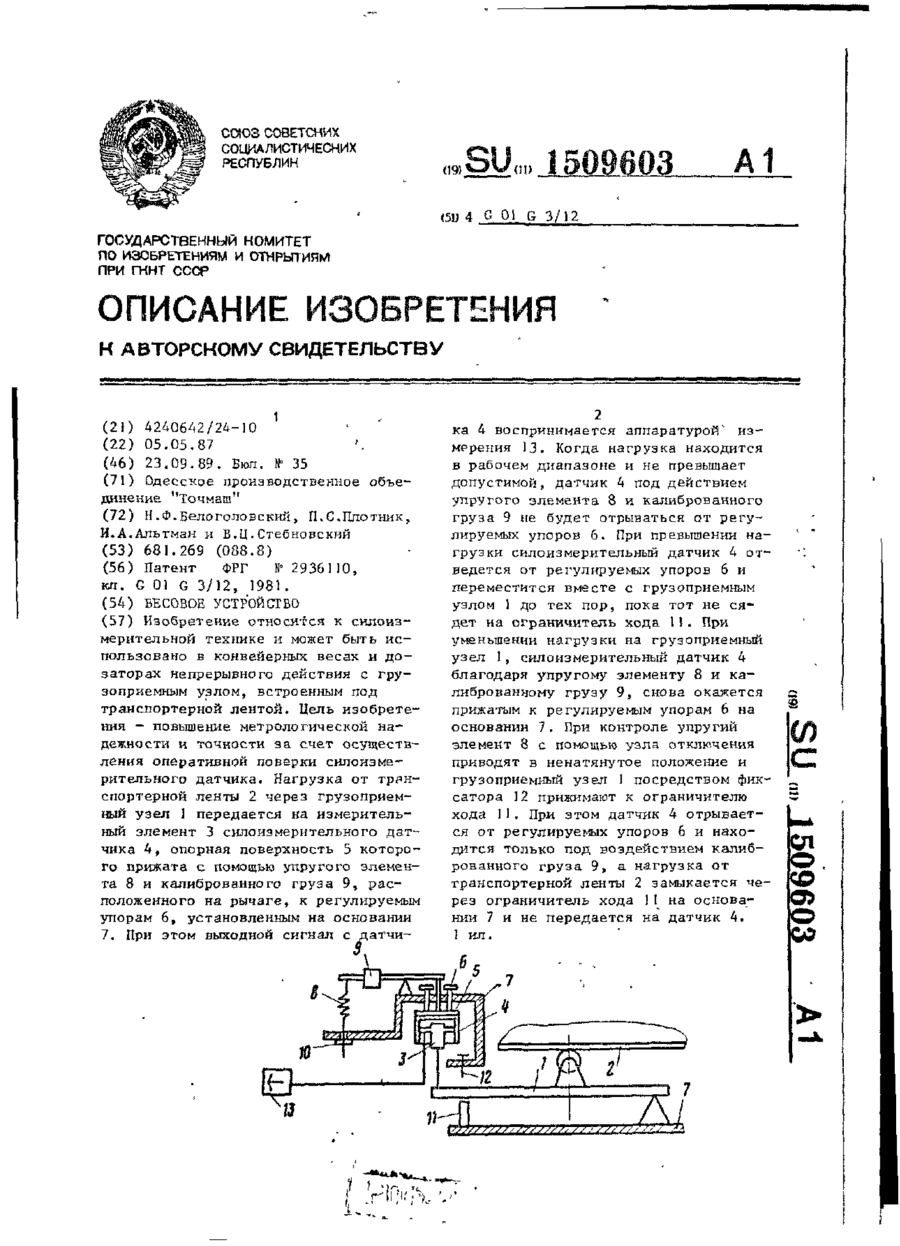
Весовое устройство, содержащее грузоприемный узел, снабженный силоизмерительным датчиком, опорная поверхность которого с помощью упругого элемента связана с регулируемыми упорами, ограничитель хода грузоприемного узла, расположенный на основании, и аппаратуру измерения, соединенную с силоизмерительным датчиком, отличающееся тем, что, с целью повышения надежности весового устройства, а также повышения точности путем обеспечения...
Ваговий пристрій

Номер патенту: 15221
Опубліковано: 30.06.1997
Автори: Плотник Павло Семенович, Фурер Олександр Мойсейович
МПК: G01L 1/22
Формула / Реферат:
Весовое устройство, содержащее опорный и грузоприемные узлы с тягами, тензо-резисторный силоизмерительный датчик растяжения, расположенный между опорной и грузоприемной тягами, отличающееся тем, что опорная и грузоприемная тяги выполнены в виде взаимоперпендикулярных эластичных пластин, связанных с тензорезисторным силоизмерительным датчиком цилиндрическими шарнирами, перпендикулярными плоскости пластин.
Ваговий пристрій

Номер патенту: 48340
Опубліковано: 15.08.2002
Автори: Альтман Ілля Аронович, Данчишен Микола Михайлович
МПК: G01G 23/00, G01G 3/00
Формула / Реферат:
Ваговий пристрій, який містить жорстко закріплений до нерухомої опори тензорезиcторний датчик, вертикально розташовану пружину, яка з'єднує датчик з елементом силовведення, жорстку опору, який відрізняється тим, що жорстка опора виконана у вигляді нерухомо закріплених до датчика двох вертикально розташованих циліндричних стержнів, жорстко зв'язаних у нижній частині, виконаній у вигляді пластини, з траверсою з можливістю її переміщення по...
Попередній патент: Багатошарова труба із композиційних матеріалів
Наступний патент: Ортодонтичний імплантат
Випадковий патент: Суднова система моніторингу для попередження ефекту коанда