Спосіб дозування у ваговому пристрої для гідравлічного навантажувача
Номер патенту: 59735
Опубліковано: 25.05.2011
Автори: Карпов Константин Вікторович, Бугаєнко Георгій Якович, Тумайкін Вячеслав Володимирович

Формула / Реферат
Спосіб дозування у ваговому пристрої для гідравлічного навантажувача, який полягає в тому, що вимір величини зусилля, яке виникає при підйомі стріли навантажувача, виконують шляхом обробки сигналів на виході датчиків тиску у проміжок часу між сигналом на виході дискретного датчика початку вимірювання та сигналом на виході дискретного датчика кінця вимірювання, перед відвантаженням чергової дози оператор-водій навантажувача з клавіатури вводить задане значення цієї дози, яке відображають на індикаторі разом з фактичною сумарною масою, яка відвантажена, та різницею між заданим значенням чергової дози та фактичною сумарною масою, яка вже відвантажена, який відрізняється тим, що після зважування чергового ковша масу вантажу у цьому ковші автоматично залічують у фактичну сумарну дозу, при цьому фактичну сумарну дозу кожен раз порівнюють з заданим її значенням, різницю між ними вираховують в процесорному блоці та відображають на індикаторі, а коли ця різниця стає менше маси вантажу у черговому ковші, автоматичного залічення не виконують, а оператору-водію навантажувача пропонують натиснути одну з клавіш: "ЗАЛІК" або "ПОВТОР", при цьому при натисненні клавіші "ЗАЛІК" масу вантажу у останньому ковші добавляють до маси сумарної дози, а при натисненні клавіші "ПОВТОР" залічення не виконують і оператору пропонують виконати відсипку продукту з ковша і після відсипки повторно приводять зважування маси продукту в ковші, для чого опускають стрілу до того її положення, при якому вона перетинає дискретний датчик початку вимірювання, та знову підіймають стрілу до того її положення, в якому вона перетинає дискретний датчик кінця вимірювання, визначаючи, таким чином, нову масу продукту в ковші, знову порівнюють цю нову масу продукту в ковші з різницею між сумарною масою і заданим значенням дози, і так виконують доти, поки ця різниця не набуде допустимого значення, після чого приводять її залік до сумарної дози.
Текст
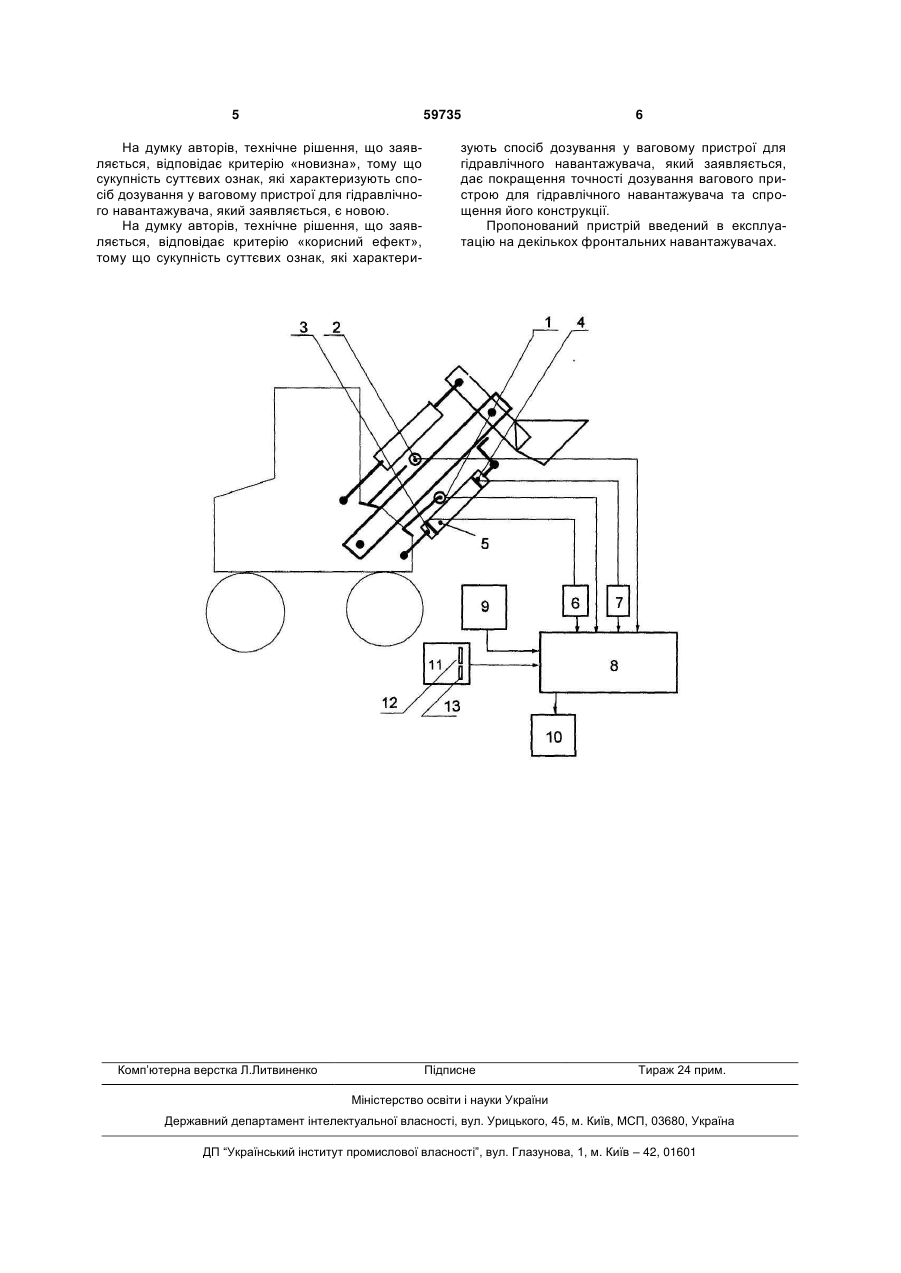
Спосіб дозування у ваговому пристрої для гідравлічного навантажувача, який полягає в тому, що вимір величини зусилля, яке виникає при підйомі стріли навантажувача, виконують шляхом обробки сигналів на виході датчиків тиску у проміжок часу між сигналом на виході дискретного датчика початку вимірювання та сигналом на виході дискретного датчика кінця вимірювання, перед відвантаженням чергової дози оператор-водій навантажувача з клавіатури вводить задане значення цієї дози, яке відображають на індикаторі разом з фактичною сумарною масою, яка відвантажена, та різницею між заданим значенням чергової дози та фактичною сумарною масою, яка вже відвантажена, який відрізняється тим, що після зважування чергового ковша масу вантажу у цьому ковші автоматично залічують у фактичну сумарну дозу, U 2 (19) 1 3 між заданою величиною дози та величиною сумарної маси дози, що вже відвантажена, цю масу все одно відвантажують та оператор не має можливості змінити її. Недоліком цього способу є також необхідність мати в складі вагового пристрою гідравлічного навантажувача дискретний датчик положення ковша, що знижує надійність приладу та, оскільки навантажувачі різних виробників мають різну конструкцію механізму закриття ковша, приводить до необхідності розробляти на кожен тип навантажувача свою конструкцію кріплення дискретного датчика положення ковша. В основу корисної моделі поставлена мета удосконалення способу вагового дозування для забезпечення більшої точності дозування, більшої надійності, а також спрощення конструкції шляхом виключення зі складу вагового пристрою для гідравлічного навантажувача датчика положення ковша. Поставлена мета досягається таким чином: перед відвантаженням чергової дози оператор (водій) навантажувача з клавіатури вводить задане значення дози, яке повинно бути отримано в процесі навантажування. Після зважування чергового ковша маса вантажу в ньому автоматично залічується до фактичної сумарної дози, при цьому фактичну сумарну дозу кожен раз порівнюють з заданим її значенням, різницю між ними вираховують в процесорному блоці та відображають на індикаторі. Коли ця різниця стає менше маси вантажу у черговій порції, автоматичного залічення не виконують, а оператору-водію навантажувача пропонують натиснути одну з клавіш: «ЗАЛІК» або «ПОВТОР». При натисненні оператором клавіші «ЗАЛІК» масу вантажу в останньому ковші добавляють до маси сумарної дози, при натисненні клавіші «ПОВТОР» - залічення не відбувається і оператору пропонують виконати відсипку продукту з ковша і після цього повторно приводять зважування маси продукту в ковші, для чого опускають стрілу до того її положення, при якому вона перетинає датчик початку вимірювання, та знову підіймають стрілу до того її положення, в якому вона перетинає датчик кінця вимірювання, визначаючи, таким чином, нову масу вантажу у ковші, знову порівнюють цю нову масу вантажу у ковші з різницею між сумарною масою і заданим значенням дози, і так виконують доти, поки ця різниця набуде допустимого значення, після чого приводять її залік до сумарної дози. Загальний вигляд пристрою, в якому реалізований спосіб, що пропонується, відображений на кресленні. Пристрій має дискретний датчик 1 початку вимірювання та дискретний датчик 2 кінця вимірювання, що закріплені на корпусі навантажувача та встановлені на траєкторії руху стріли навантажувача, два тензометричні датчика тиску, один з яких (датчик 3), встановлений на вході, а другий (датчик 4) - на виході гідравлічного циліндру 5, два аналого-цифрових перетворювача 6 і 7, процесорний блок 8, пам'ять 9, індикатор 10 та клавіатуру 11. На клавіатурі 11 є клавіша 12 «ЗАЛІК» та клавіша 13 «ПОВТОР». Роль цих клавіш 59735 4 можуть виконувати будь які інші клавіші клавіатури, які запрограмовані належним чином. Пристрій працює таким чином. Перед початком роботи оператором-водієм навантажувача на клавіатурі 11 встановлюється маса дози, яка повинна бути відвантаженою, яка запам'ятовується в пам'яті 9 з автоматичним джерелом живлення, а також виконується тарування при цьому підіймається порожній ківш та вимірюється його маса, яка запам'ятовується в пам'яті 9. В подальшому маса «тара» кожен раз відіймається від маси ковша «брутто» і таким чином підраховується маса ковша «нетто». При підйомі стріли навантажувача стріла перетинає лінію дискретного датчику 1 початку вимірювання і він дає процесорному блоку 8 сигнал на початок вимірювання - при цьому починається обробка сигналів датчиків тиску в процесорному блоці 8, яка закінчується тоді, коли стріла перетинає лінію дискретного датчика 2 кінця вимірювання. Таким чином, процес починається з однієї і той же точки на траєкторії стріли навантажувача, а саме вимірювання виконується на одній і тій же ділянці траєкторії стріли, тому результат вимірювання адекватно залежить від маси ковша. Процесорний блок 8 рахує різницю показників датчиків, яка пропорційна масі ковша. Від цієї маси «брутто» процесорний блок віднімає масу «тара» і отримана таким чином маса «нетто» залічується в сумарну масу та порівнюється з тим значенням маси, яке встановив оператор-водій навантажувача при настройці приладу перед початком відвантаження. Коли сумарна маса перевищить задану при настройці масу дози, залік маси в цьому ковші не приводять, а звертаються через індикатор 10 до оператора-водія навантажувача, чи приводити його - тоді оператор натискує клавішу «ЗАЛІК», чи не приводити - тоді оператор натискує клавішу «ПОВТОР». При натисканні клавіші «ПОВТОР» оператор приводить відсипку ковша та його повторне зважування, після чого мікропроцесорний блок порівнює повторно зважену масу у ковші з тією, яка є допустимою - і такий цикл повторюється доти, поки маса матеріалу у ковші набуде допустиме значення. По завершенню циклу завантаження заданої оператором навантажувача порції показники вертаються на нуль і процес сумування починається з початку. Таким чином за допомогою способу, що пропонується, дозування маси вантажу, що відвантажується гідравлічним навантажувачем стає значно більш точним, при цьому зникає необхідність в використанні дискретного датчика положення ковша. Викладене вище підтверджує наявність причинно-наслідкових зв'язків між сукупністю суттєвих ознак корисної моделі, що заявляється, та технічним результатом, що досягається. Дана сукупність суттєвих ознак дозволяє покращити точність дозування вантажу, який відвантажується гідравлічним навантажувачем, та спростити конструкцію вагового пристрою за рахунок виключення дискретного датчика положення ковша. 5 59735 На думку авторів, технічне рішення, що заявляється, відповідає критерію «новизна», тому що сукупність суттєвих ознак, які характеризують спосіб дозування у ваговому пристрої для гідравлічного навантажувача, який заявляється, є новою. На думку авторів, технічне рішення, що заявляється, відповідає критерію «корисний ефект», тому що сукупність суттєвих ознак, які характери Комп’ютерна верстка Л.Литвиненко 6 зують спосіб дозування у ваговому пристрої для гідравлічного навантажувача, який заявляється, дає покращення точності дозування вагового пристрою для гідравлічного навантажувача та спрощення його конструкції. Пропонований пристрій введений в експлуатацію на декількох фронтальних навантажувачах. Підписне Тираж 24 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюDosing method in weighing device for hydraulic loader
Автори англійськоюBuhaienko Heorhii Yakovych, Karpov Kostiantun Viktorovych, Tumaikin Viacheslav Volodymyrovych
Назва патенту російськоюСпособ дозирования в весовом устройстве для гидравлического погрузчика
Автори російськоюБугаенко Георгий Яковлевич, Карпов Константин Викторович, Тумайкин Вячеслав Владимирович
МПК / Мітки
МПК: G01G 19/10
Мітки: навантажувача, дозування, ваговому, спосіб, гідравлічного, пристрої
Код посилання
<a href="https://ua.patents.su/3-59735-sposib-dozuvannya-u-vagovomu-pristro-dlya-gidravlichnogo-navantazhuvacha.html" target="_blank" rel="follow" title="База патентів України">Спосіб дозування у ваговому пристрої для гідравлічного навантажувача</a>
Ваговий пристрій для гідравлічного навантажувача
Номер патенту: 88589
Опубліковано: 26.10.2009
Автор: Бугаєнко Георгій Якович
МПК: G01G 19/00
Мітки: гідравлічного, навантажувача, пристрій, ваговий
Формула / Реферат:
1. Ваговий пристрій для гідравлічного навантажувача, який містить датчики тиску, аналого-цифрові перетворювачі, до входів яких підключені виходи датчиків тиску, а виходи яких підведені до входу процесорного блоку, датчик кута нахилу, який вимірює кут нахилу навантажувача відносно горизонту, вихід якого підведений до входу процесорного блоку, який обробляє сигнали датчиків тиску і датчика кута нахилу та підраховує масу вантажу у ковші, пам'ять...
Спосіб вимірювання стійкості вилкового навантажувача
Номер патенту: 52324
Опубліковано: 25.08.2010
Автори: Білобровський Євген Миколайович, Кічкіна Олена Іванівна, Кічкін Олексій Вікторович
МПК: G08B 31/00
Мітки: стійкості, вилкового, вимірювання, спосіб, навантажувача
Формула / Реферат:
Спосіб вимірювання стійкості вилкового навантажувача, що полягає у вимірюванні коефіцієнту запасу подовжньої та бокової стійкості навантажувача у русі та штабелюванні, який відрізняється тим, що використовують дані про вагу, максимальні кути нахилу та розміщення центра ваги навантажувача, доповнюють даними про розміщення центра ваги та вагу вантажу з вантажної RFID-мітки, зчитуваної в момент навантаження бортовим (мобільним) RFID-сканером,...
Стріла переднього фронтального навантажувача гідравлічного колісного екскаватора
Номер патенту: 19804
Опубліковано: 15.12.2006
Автори: Поздняков Володимир Олександрович, Бондарчук Олександр Петрович, Романьков Олександр Іванович, Васьковський Петро Петрович
МПК: E02F 3/32
Мітки: переднього, гідравлічного, екскаватора, фронтального, стріла, колісного, навантажувача
Формула / Реферат:
Стріла фронтального навантажувача гідравлічного колісного екскаватора, що містить дві поздовжні фігурні балки, з’єднані між собою поперечною коробчастою балкою, кінці якої скріплені косинками, у поздовжні фігурні балки вварено втулки для під'єднання стріли відповідно до порталів несучої рами екскаватора ковша, важільної системи керування ковшем і стрілою, яка відрізняється тим, що поздовжні фігурні балки виконано коробчастими і вони...
Робочий орган навантажувача
Номер патенту: 44502
Опубліковано: 12.10.2009
Автори: Сердюк Роман Валерійович, Храмцов Анатолій Миколайович
МПК: B65G 67/02
Мітки: навантажувача, робочий, орган
Формула / Реферат:
Робочий орган навантажувача, що містить ківш, який відрізняється тим, що до нього однією стороною закріплені гідроциліндри висування, які іншою стороною через пази у ковші прикріплені до бокових висувних стінок, що оперті на напрямні ролики та з'єднані з висувним дном.
Двощелепний ківш фронтального навантажувача
Номер патенту: 27218
Опубліковано: 25.10.2007
Автори: Луць Віктор Петрович, Лопачук Вадим Леонідович
МПК: E02F 3/40
Мітки: фронтального, ківш, навантажувача, двощелепний
Формула / Реферат:
Двощелепний ківш фронтального навантажувача, який містить задню щелепу в вигляді відвалу з лобовим листом, переднім ножем і боковинами, передню щелепу, виконану з днища з передньою різальною частиною та із бокових стінок, і верхніми сторонами останніх через втулки шарнірно з'єднану з верхніми сторонами боковин відвалу, на тильній стороні якого закріплені і в середніх частинах його бокових половин розміщені вушки з нижніми і верхніми отворами...
Попередній патент: Рухома платформа для розміщення глядацьких крісел в кінотеатрі
Наступний патент: Хліб з оздоровчими властивостями “5 зерен”
Випадковий патент: Стоматологічний інструмент для пломбування зубів