Ниткоподавальний пристрій з електронним регулюванням натягування нитки
Формула / Реферат
1. Нитеподагощее устройство с электронным регулированием натяжения нити, в частности для вязальных и трикотажных машин, содержащее установленный в подшипник нитеподающий барабан, кинематически связанный с валом шагового электродвигателя, преобразователь напряжение частота, выходом подключенный к первому входу блока управления частотой вращения вала шагового электродвигателя, и установленный после ни-теподающего барабана по ходу направления перемещения нити регулятор запаси нити, состоящий из датчика резерва нити с преобразователем сигнала и управляемого задатчика натяжения нити, отличающееся тем, что с целью повышения точности иитеподачи в переходных режимах работы устройства, оно снабжено последовательно соединенными интегратором и электронным пороговым элементом, при этом выход датчика резерва нити подключен к входуинтегратора, а выход электронного порогового элемента связан с входом преобразователя напряжение - частота.
2. Устройство по п. 1, отличающееся тем, что интегратор состоит из двух интегрирующих звеньев с различными постоянными времени и электронного переключателя, при этом объединенные выходы интегрирующих звеньев являются выходом интегратора, входом которого является управляющий вход электронного переключателя, выходом связанного с объединенными входами интегрирующих звеньев.
3. Устройство по пп. 1 и 2, отличающееся тем, что интегрирующие звенья состоят из включенных последовательно первого резистора и конденсатора и второго резистора, который через электронный переключатель включен параллельно конденсатору.
4. Устройство по п. 1, отличающееся тем, что регулятор резерва нити содержит петлевой иитенатяжитель, состоящий из двух нитенапрапителей и установленного между ними рычага, кинематически связанного с выходом управляемого задатчика натяжения нити и с входом преобразователя сигнала.
5. Устройство по пп. 1 и 4, отличающееся тем, что преобразователь сигнала выполнен оптико-электрическим.
6. Устройство по пп. 1, 4 и 5, отличающееся тем, что оптико-электрический преобразователь имеет нелинейную статическую характеристику.
7. Устройство по п. 1, отличающееся тем, что задатчик натяжения нити состоит из последовательно соединенных управляемого регулятора тока и моментного электродвигателя.
8. Устройство по пп. 1, 4 и 7, отличающееся тем, что кинематическая связь рычага регулятора резерва нити с валом моментного электродвигателя выполнена в виде подшипника.
9. Устройство по пп. 1 и 7, отличающееся тем, что выход датчика резерва нити соединен с корректирующим входом управляемого регулятора тока.
10. Устройство по пп. 1, 7 и 9, отличающееся тем. что управляемый регулятор тока содержит блок дифференцирования, вход которого является корректирующим входом управляемого регулятора тока.
11. Устройство по пп. 1, 7 и 10, отличающееся тем, что управляемый регулятор тока дополнительно снабжен блоком дистанционного изменения усилия натяжения нити и сумматором, один вход которого соединен с выходом блока дифференцирования, а другой - с выходом блока дистанционного изменения усилия натяжения нити.
12.Устройство по пп. 1 и 4, отличающееся тем, что рычаг регулятора резерва нити имеет датчик крайних положений, выходы которых связаны с соответствующими блокирующими входами блока управления частотой вращения вала шагового электродвигателя.
13. Устройство по п. 1, отличающееся тем, что оно снабжено генератором синхроимпульсов, дополнительным преобразователем частота - напряжение и компаратором, а блок управления частотой вращения шагового электродвигателя имеет входной переключающий каскад, при этом выход интегратора соединен с первым входом компаратора, второй вход которого через дополнительный преобразователь частота - напряжение подключен к выходу генератора синхроимпульсов, а выход - к управляющему входу переключающего каскада, причем первый вход входного переключающего каскада является первым входом блока управления частотой вращения вала шагового электродвигателя, а второй вход входного переключающего каскада связан с выходом генератора синхроимпульсов.
14. Устройство по п. 1, отличающееся тем, что преобразователь напряжение-частота выполнен с регулируемым коэффициентом передачи.
Текст
Изобретение относится к трикотажной промышленности и предназначено для регулирования натяжения нити на вязальных трикотажных и подобных им машинам. Цель изобретения - повышение точности нитеподачи в переходных режимах работы -достигается за счет того, что устройство, содержащее нитеподающий барабан, кинематически связанный с валом шагового электродвигателя, преобразователь напряжение-частота, выходом подключенный к входу блока управления частотой вращения вала двигателя, и установленный после нитеподающего барабана по ходу направления перемещения нити регулятор запаса нити, состоящий из датчика резерва нл-.м с преобразователем сигнала и управляемого задатчика натяжения нити, снабжено последовательно соединенными интегратором и электронным пороговым элементе м, установленными между датчиком резерва нитіл и преобразователем напряжение - частота 13 з п. ф-лы, 16 ил Изобретение относится к трикотажной промышленности и предназначено для регулирования натяжения нити на вязальных, .рикотэжиых и подобных им машиьах Цель изобретения - повышение точности нитеподачи в переходных режимах работы устройс^ез На фиг. 1 представлено устройство, общий вид; на фи1" 2-разрез А-А на фиг 1;на фиг. 3 ^ 4 - нижняя часть корпуса рагрез варианты: на фиг 5 - график пусковой характеристик/ двигателя нитеподающего Барабаьэ; на фиг 6 - график изменения скорости двигателя ните подаю ще го барабана при его выдаче на фиг 7 - блок-схема электронной части устройства на фиг 8 принципиальная электрическая схема элек тронной части устройства; на фиг S - статическая характеристика дзтчикг резерва нити; на фиг. 10 - фрагмент блок-схемы электронной части устройств*!, на .риг 1 1 - фози^экт принципиальной электрической схемы злектронной части устройства, на Ф^г 12 -диаграмма возможных пер^чьи,ений рыча, с датиу.кз резерва нити, на фи* 13~16 - варианты выполнения мехэныо'-ов смота кити Нитеподзющее устройство содержит корпус 1, на котором рэзмещьь кронштейн 2 для крепленая устройсіва на м?шине (не показано) В верхней часі л корпуса 1 установлен шаговый электродвигатель 3, вал 4 которогс кинематически связан с ьитепод?ющим барабаном 5 Bapd5aH 5 содержит ступицу 6, посаженную на вал 4, и проволок . t 1727535 ный каркас 7. Каркас 7 имеет параллельную часть, на которой размещаются нити 8, и У-образную часть 9, примыкающую к стенке корпуса 1. Для лучшего отвода тепла от электродвигателя 3, размещенного во внутренней полости корпуса, на внешней его части установлен радиатор 10 с ребрами 11, На верхней части корпуса (выше барабана 5) смонтирован кронштейн 12снитепроводником 13 и натяжной рычаг 14. Ниже барабана 5 размещены нитенаправители 15 и 16 для направления подаваемой нити 17, проходящей также через тарельчатый нитенатяжитель 18. Нитензправитель 19 размещен на установленном с возможностью поворота вокруг оси 20 рычага 21. Нитенаправители 15 и 16 и нитенаправитель 19 рычага 21 образуют петлевой нитенатяжитель регулятора резерва нити. Между рычагом 14 и нитенатяжителем 18 размещен датчик 22 контроля обрыва нити 17. Разделительная стенка 23 делит внутреннюю полость корпуса t на две части. В верхней части установлен электродвигатель З, а в нижней части 24 размещен малогабаритный двигатель 25 постоянного тока, вал 26 которого через выполненное в стенке корпуса 1 отверстие кинематически связан с рычагом 27, установленным с возможностью механического взаимодействия с рычагом 21. Рычаг 21 датчика 28 резерва нити имеет преобразователь сигнала, выполненный оптико-электрическим и состоящий из светоизлучающего диода 29 и фототранзистора 30, размещенных на держателе 31. Экранирующий диск 32 установлен с возможностью поворота посредством рычага 21 и частичного перекрытия светового потока, излучающего диодом 29 и попадающего на фототранзистор 30 Диск 32 имеет форму, обеспечивающую на выходе оптикоэлектрического преобразователя нелинейную статическую характеристику, изображенную на фиг. 9 ( а - угол поворота рычага 21, U-выходное напряжение). Желательно, чтобы характеристика имела вид экспоненциальной функции. Рычаг 21 регулятора резерва нити имеет датчики 33 и 34 (упорные шлифты) крайних положений. 5 10 15 20 25 30 35 40 45 50 На оси 20 рычага 21 жестко размещен эксцентрик 35, установленный с возможностью взаимодействия с датчиком 36 его положения. В нижней части 37 корпуса 1 55 установлена сигнальная лампа 33 для индикации правильности работы устройства. В корпусе 1 (вне его полостей) размещен потенциометр 39, электрически связанный с блоком управления двигателя 25. На внешней стороне одной из стенок корпуса 1 размещены главный выключатель 40, сигнальная лампа 41 и клавиша 42 для ручного управления работой устройства. Вместо эксцентрика 35 с датчиком его положения 36 может использоваться конструкция, изображенная на фиг. 3. Она состоит из электродвигателя 43 постоянного тока, вал АА которого связан с осью 20 рычага 21 и с экранирующим диском 45, установленным между светодиодом 46 и фототранзистором 47. На фиг. 4 показана конструкция, в которой не используется рычаг 27. В этом случае, вместо эксцентрика 35 с датчиком 36 используется электродвигатель 25, на валу которого установлены экранирующие диски 32 и 45, взаимодействующие с соответствующими оптико-электрическими преобразователями. Выход фототранзистора 30, являющийся выводом датчика 28 резерва нити, через фильтр 48 нижних частот и усилитель 49 связан с регулирующим блоком 50. Блок 50 содержит интегратор, состоящий из двух интегрирующих звеньев 51 и 52, имеющих различные постоянные времени, электронного порогового элемента 53, фильтра 54 нижних частот и преобразователя 55 напряжение-частота. Вид выходного сигнала на выходе преобразователя 55 показан на фиг. 7 позицией 56. Этот выходной сигнал поступает на вход блока управления частотой вращения вала шагового электродвигателя (блок управления выполнен на последовательно включенныхуправляющем электронном блоке 57 и усилителе 58 мощности). Двигатель 25 постоянного тока, выполняющий функции исполнительного механизмэ управляемого задатчика натяжения нити, связан с выходом усилителя 59 мощности управляемого регулятора 60 тока. Регулятор 60 и моментный электродвигатель (двигатель 25) образуют управляемый задатчик натяжения нити. Управляющий вход регулятора 56 связан с выходом потенциометра 39. Выходной сигнал усилителя 49 подключен к потенциометру 61, выход которого через дифференцирующий блок 62, сумматор 63 и повторитель 64 напряжения соединен с входом потенциометра 39. Движки потенциометров 39 и 61 связаны между собой. Сумматор 63 имеет дополнительный вход, который через разделительное звено 65 может быть подключен к выходу внешнего управляющего сигнала. Фототранзистор 30 через фильтр 48 нижних частот, образованный резистором 66 и конденсатором 67 (фиг. 8), связан с 1727535 транзистором 68 эмиттерного повторителя (усилителя 49), в цепь эмиттера которого включен резистор 69. К эмиттеру транзистора 68 подключены резисторы 70 и 71. Резистор 71 включен в эмиттерную цепь транзистора 72, выполняющего функции электронного переключателя. База транзистора 72 через резистор 73 связана с "массой" и через диод 74 - с эмиттером транзистора 68. Параллельно транзистору 72 подключен конденсатор 75. Конденсатор 75 с резистором 70 образуют интегрирующее звено 51. Электронный пороговый элемент 53 образован диодами 76 и 77, шунтированными конденсатором 78. Интегрирующее звено 52 образовано резисторами 70 и 71 и конденсатором 75. Фильтр 54 состоит из резистора 79 и конденсатора 80 и связан с преобразователем 55 напряжение-частота, реализованном на интегральной схеме (УС). Управляющий вход преобразователя 55 связан с выходом делителя напряжения, выполненного на резисторах 81 и 82. Преобразователь 55 имеет регулируемый коэффициент передачи, что обеспечивается потенциометром 83, резистором 84 и конденсатором 85. Позицией 86 показан выход преобразователя. Регулятор 60 тока реализован на интегральной схеме УС. Вход 87 интегральной схемы (регулятора 60 тока) связан с выходной цепью транзистора 88. Уровень напряжения на выходе транзистора 88 регулируется потенциометрами 89 и 39 и резистором 90, включенным в эмиттерную цепь транзистора 91. Транзистор 91 и резистор 90 образуют повторитель (усилитель) 64. База транзистора 91 через резистор 92 и диод 93 (звено 65) может быть подключена к источнику сигнала дистанционного управления. Дифференцирующий блок 62 состоит из конденсатора 94 и резистора 95. шунтированного диодом 96. Резисторы 97. 98 и 99 служат для линеаризации управляющего сигнала на входе транзистора 83. На входе блока 57 включен электронный ключ 100 (фиг 10), входами связанный с выходами преобразователя 55 и источника сигнала 101 дистанционного управления Управляющий вход ключа 100 связан с выходом компаратора 102. Входы комгаратора 102 через резисторы 103 и 104 и потенциометр 105 связаны с выходами преобразователя 106 и интегратора, образованного звеньями 51 и 52. Фрагмент принципиальной схемы, обведенный пунктиром и обозначенный позицией 107 на фиг. 8, представлен на фиг 11 5 10 15 20 25 30 35 40 45 50 55 (буквенные обозначения "а", "Ь", "с", и "(Г ( служат для индикации точек подключений '" одних и тех же элементов на фиг. 8 и11). В ' цепь коллектора транзистора 68 включен потенциометр 108, связанный с базой транзистора 109, в эмиттерной цепи которого включен резистор 110, а в коллекторной потенциометр 89. Коллектор транзистора 109 через резистор 110 связан с источником +V. На фиг. 13-16 показана другая конструкция механизма смота нити (вместо нитеподающего барабана). Этот механизм содержит установленные в подшипниках с возможностью вращения цилиндрические валики 111 и 112, имеющие параллельные оси, В рабочем состоянии бобина 113 (с гильзой 114) соприкасается с обоими валиками. Расстояние между валиками 111 и 112 меньше диаметра гильзы 114. Данный механизм может быть использован как с одной бобиной (фиг. 13), таки с двумя бобинами (фиг. 14), Оба валика 111 и 112 на концах опираются на подшипниках качения 115 (фиг. 15). установленных в торцовой пластине 116, которая жестко соединена распорками 117 с верхней частью корпуса 1. Ниже обоих валиков 111 и 112 для каждого места сматывания нити устано^леч свободно вращающийся зокр* г горизонтальной оси 118 нитенэправляющий ролик 119. Валик 112 (фиг. 15) выполнен в виде полого вала, стационарно насаженного непосредственно на вал 4 шагового электродвигателя 3. Таким образом, валик 112 является приводным Его поверхность фрикционно связана с поверхностью бобины 113, лежащей на обоих валиках 111 и 112. Валик 112 опирается на подшипник и установлен с возможностью вращения за счет фрикционных сил. S принципе оба валика могуї быть привсдными (фиг. 16). В зтсм случае оба еалика 111 и 112 через бесконечную зубчатуїс передачу 120 кинематически связаны с залом шагового двигателя 3. Для образования резерва нити используется нитензгфавляющий ролик 119. Нителодающее устройство работает следует образом. Нить 17, поступающая например, с бобины (не показана), проходит ^ерез 'іитспроводник 13, тарельчатый нитенатяжитель 18, натяжной рычаг 14 и поступает на бараOEih 5 в зоие его У-образной части 9. Затем витки нити 17 оказываются на проволочном каркасе 7. Для избежания проскапьзывания нитей относительно барабана 5 его поверхность охватывается несколькими витками 1727535 нити. Сходящая с барабана 5 нить проходит через нитенаправитель 15, нитенаправитель 19 рычага 21 и нитенапрааитель 16 и поступает к потребителю нити (не показан). Обрыв нити контролируется датчиком 22 контроля обрыва нити. В зависимости от угла поворота рычага 21, а следовательно, и экранирующего диска 32 на выходе фототранзистора 30 появляется аналоговый сигнал, находящийся в функциональной зависимости от угла поворота рычага 21 в соответствии с характеристикой, пбказанной на фиг. 9. Движение рычага21 вобоих направлениях ограничено штифтами 33 и 34. Если не происходит потребление нити,то рычаг 21 располагается вблизи левого штифта 33, а при повышенной скорости движения (потребления) нити - вблизи штифта 34. При нормальной работе устройства рычаг 21 располагается между штифтами 33 и 34. При взаимодействии рычага 21 со штифтами (аварийная ситуация) эксцентрик 35 взаимодействует с датчиком 36, который вырабатывает сигнал на останов машины. 5 10 15 20 25 Потенциометром 39, включенным в цепь управления двигателя 25, задается требуемое усилие натяжения нити. С помощью главного выключателя 40 обеспечивается подвод (отключение) электрического 30 питания к устройству. Сигнальная лампа 41 включается при подводе питания к устройству. С помощью клавиши 42 обеспечивается ручной режим работы барабана 5. Вместо эксцентрика 35 (фиг. 3) может 35 использоваться датчик положения экранирующего диска 45, установленного на валу электродвигателя 43, кинематически связанного с осью 20 рычага 21. Выходной сигнал датчика положения диска 45 (выход 40 фототранзистора 47) выдает сигнал на отключение, когда рычаг 21 взаимодействует со штифтами 33 и 34. Вместо эксцентрика 35 (фиг. 4) может использоваться злектро-оптический датчик 45 положения экранирующего диска 45. установленного на валу 26 двигателя 25, кинематически связанного с рычагом 21. Принцип работы этого датчика аналогичен. Аналоговый сигнал с выхода фототран- 50 зистора 30, характеризующий величину резерва и натяжение нити, проходит через фильтр 48 и усилитель 49 и поступает на вход блока 50, на выходе которого формируется частотный сигнал 56. Этот сигнал, 55 пройдя через блок 57 и усилитель 58 мощности, поступает на вход электродвигателя 3. Скорость вращения его вала определяется частотой сигнала 56. Кроме того, выходной сигнал усилителя 49 через потенциометры 8 39 и 61 поступает на вход блока 62 дифференцирования. Продифференцированный сигнал проходит через сумматор 63, повторитель 64 и поступает на потенциометр 39. Таким образом, на вход регулятора 60 подключается компенсирующий сигнал, носящий временной характер Двигатель 25 постоянного тока (например, с возбуждением от постоянных магнитов), выполняющий функции задатчика натяжения нити, развивает на своем валу момент вращения, не зависящий от углового положения рычага 27. Через звено 65 может быть подведен сигнал от внешнего источника (не показан) дистанционного управления, Этот сигнал позволяет дистанционно задать требуемое натяжение нити. При стационарной работе устройства двигатель 3 приводит во вращение барабан 5 со скоростью, обеспечивающей требуемое натяжение нити, При этом рычаг 21 располагав ся между штифтами 33 и 34. При появлении сигнала рассогласования, вызванного, например, уменьшением потребления нити, блок 50 изменяет частоту сигнала 56 до тех пор, пока рычаг 21 не займет требуемое положение, обеспечивающее равенство усилия натяжения с заданным усилием натяжения, определяемым положением рычага 27. При возникновении быстрого изменения потребления нити шаговый двигатель 3 с установленным на его валу барабаном 5 без специальных мер не в состоянии быстро отработать возникший сигнал рассогласования в силу своей инерционности. На фиг. 5 и 6 показаны характеристики пуска и выбега двигателя 3. Анализ этих характеристик показывает, что двигателю 3 требуется по меньшей мере 50 мс для достижения скорости движения нити ~ 4 м/с, что недопустимо. Для уменьшения инерционности двигателя 3 используется конструкция блока 50, показанная на фиг. 7. Между нитенаправителями 15, 16 и 19 предусмотрен резерв нити, величина которого достаточна для компенсации потребления нити при пуске шагового двигателя. В блоке 50 предусмотрен интегратор, состоящий из двух звеньев 51 и 52, имеющих постоянные времени, согласованные с характеристиками пуска \л выбега двигателя. Этим достигается то, что в течение времени пуска двигателя 3 потребление нити может быть компенсировано из резерва нити При этом натяжение нити благодаря стабильности вращающего момента двигателя 25 практически неизменное. В течение времени компенсации шаговый двигатель 3 ус~ 1727535 коряет частоту вращения барабана 5 до числа оборотов, соответствующего требуемой скорости движения нити Б пределах времени, продолжительность которого определена характеристикой пуска двигателя 3. Датчик 28 непрерывно выдает информацию об угповом положении рычага 21, С увеличением частоты вращения вала шагового двигателя 3 увеличивается и скорость потребляемой нити с барабана 5. Рычаг 21 в результате воздействия на него рычага 27 автоматически переводится в угловое положение, соответствующее требуемому потреблению нити. При внезапном прекращении потребления нити резерв нити увеличивается, так как рычаг 27 воздействует на рычаг 21 в соответствующем направлении. Датчик 28 вырабатывает сигнал, характеризующий поворот рычага 21, который воздействует на блок 50 в сторону снижения частоты вращения шагового двигателя. При этом изменения частоты сигнала 56 ограничиваются интегрирующим звеном 52 до значений частоты, способных отработать шаговым двигателем. Для нормального функционирования устройства необходимо, чтобы постоянная времени звена 52 была меньше постоянной времени звена 51. Желательное соотношение между постоянными времени 4:1. Объединенные входы интегрирующих звеньев связаны с входом электронного порогового элемента 53. Назначение порогового элемента-исключить на входе фильтра 54 подачу напряжения ниже предельно заданного значения. Фильтр 54 нижних частот предназначен для исключения прохождения помех на вход преобразователя 55 напряжение-частота. На фиг. 10 изображена блок-схема системы управления устройством, имеющая иное, чем на фиг. 8, выполнение блока 50 регулирования. Особенностью схемы является подключение на вход блока 57 ключа переключателя 100, который позволяет подводить на вход блока 57 либо частотный сигнал 56 с выхода преобразователя 55, либо синхронизирующий частотный сигнал 101 от внешнего источника. Для управления ключом 100 используется выходной сигнал компаратора 102. Преобразователь 106 преобразует внешний частотный сигиал 101 в аналоговый сигнал-напряжение, которое через резистор 104 подводится потенциометру 105. К потенциометру 105 через резистор 103 подводится также напряжение с выхода интегрирующих звеньев 51 и 52. Компаратор 102 сравнивает эти напряжения и выдает 5 10 15 20 25 30 35 40 45 50 55 10 сигнал на переключение ключа 100. Потенциометром 105 устанавливается уровень переключающего сигнала. Когда процесс пуска шагового двигателя закончен, рычаг 21 занимает положение, соответствующее требуемой скорости смота нити в стационарном режиме. При этом с выхода интегрирующих звеньев к резистору 103 подводится определенное напряжение. Путем сравнения величины этого напряжения с напряжением, соответствующим частотному сигналу 101, компаратор 102 автоматически определяет окончание процесса пуска двигателя 3. Компаратор переключаетключ 100 и скорость вала двигателя 3 уже определяется частотным сигналом 101. Компаратор 102 переключает ключ 100 в исходное состояние при режиме выбега шагового двигателя 3. При работе с нитями, сматываемыми при достаточно больших значениях натяжения, целесообразно использовать схему управления, обозначенную на фиг. 8 позицией 107, принципиальная схема которой изображена на фиг. 11. Аналоговый сигнал с выхода фототранзистора 30, характеризующий положение рычага 21, поступает на вход транзистора 68 и затем через скользящий контакт потенциометра 108 подводится к базе р-п-р-трзкзистора 109, который выполняет функцию переключэющего усилителя. Отрицательная обратная связь, образованная резистором 121, препятствует резкому изменению потенциала на базе транзистор? 109. Поэтому переключение транзистора 109 происходит плавно и без гистерезиса при перемещении рычагз 21. Одновременно резистор 121 служит для установки нижнего значения натяжения нити при неподвижном двигателе 3. Когда рычаг 21 занимает такое положение, при котором шаг-' вый ДБ^ГЬЇЙ/ІЬ останавливается (отсутствует потребление нити), транзистор 103 практически обесточен. При этом через оба потенциометра 8S и 39 (фиг. 8) протлоет ток, ограниченный резистором 121. вызывающий такое падение напряжения на базе транзистора 88, при котором в его эмиттерной цепи сигнал, поступающий на вход 87 регулятора 60 тока, достаточно мал. В результате двигатель 25 нагружается малым током возбуждения, снижается заданное значение натяжения нити и уменьшается усилие рычага 27 на рычаг 21. При возобновлении потребления нити фототранзистор 30 выдает аналоговый сигнал, который через іранзистор 58 делает транзистор 109 практически полностью 11 1727535 проводящим. При этом потенциал коллектора достигает значения, близкого к значению +V. В результате возрастает значение тока через потенциометры 39 и 89 и устанавливается требуемое значение натяжения нити, определяемое моментом на валу двигателя 25. Работа фрагмента 107 схемы управления может быть проиллюстрирована диафрагмой, изображенной на фиг. 12. Вся возможная траектория движения рычага 21, ограниченная штифтами 33 и 34, разбита на зоны А и В. Если рычаг 21 располагается в зоне А, то нить сматывается при заданном значении натяжения и резерв нити имеет исходную величину. При переходе рычага границы между зонами А и В (рычаг в зоне В) шаговый двигатель останавливается за время, определяемое характеристикой его выбега. Зона В включает в себя зону С. При попадании рычага в зону С начинает функционировать схема 107. При этом заданное натяжение нити снижается. Конструкции нитеподающих устройств, изображенные на фиг 13-16, управляются аналогично. Формула изобретения 1. Нитеподающее устройство с электронным регулированием натяжения нити, в частности для вязальных и трикотажных машин, содержащее установленный в подшипник нитеподающий барабан, кинематически с в я з а н н ы й с валом ш а г о в о г о электродвигателя, преобразователь напряжение - частота, выходом подключенный к первому входу блока управления частотой вращения вала шагового электродвигателя, и установленный после нителодающего барабана по ходу направления перемещения нити регулятор запаси нити, состоящий из датчика резерва нити с преобразователем сигнала и управляемого задатчика натяжения нити, о т л и ч а ю щ е е с я тем, что, с целью повышения точности нитеподачи в переходных режимах работы устройства, оно снабжено последовательно соединенными интегратором и электронным пороговым элементом, при этом выход датчика резерва нити подключен к входу интегратора, а выход электронного порогового элемента связан с входом преобразователя напряжение - частота 5 10 15 20 25 30 35 40 45 50 12 теля, выходом связанного с объединенными входами интегрирующих звеньев. 3. Устройство по пп. 1 и 2, о т л и ч а ющ е е с я тем, что интегрирующие звенья состоят из включенных последовательно первого резистора и конденсатора и второго резистора, который через электронный переключатель включен параллельно конденсатору . 4. Устройство по п. І . о т л и ч а ю щ е е с я тем, что регулятор резерва нити содержит петлевой нитенатяжитель, состоящий из двух нитенаправителей и установленного между ними рычага, кинематически связанного с выходом управляемого задатчика натяжения нити и с входом преобразователя сигнала. 5. Устройство по пп. 1 и 4, о т л и ч а ю щ е е с я тем, что преобразователь сигнала выполнен оптико-электрическим 6. Устройство по пп. 1, 4 и 5, о т л и ч а ю щ е е с я тем, что оптико-электрический преобразователь имеет нелинейную статическую характеристику. 7. Устройство по п. 1 , о т л и ч а ю щ е е с я тем, что задатчик натяжения нити состоит из последовательно соединенных управляемого регулятора тока и моментного электродвигателя. 8. Устройство по пп. 1, 4 и 7, о т л и ч а ю щ е е с я тем, что кинематическая связь рычага регулятора резерва нити с валом моментного электродвигателя выполнена в виде подшипника. 9. Устройство по пп. 1 и 7, о т л и ч а ю щ е е с я тем что выход датчика резерва нити соединен с корректирующим входом управляемого регулятора тока. 10. Устройство по пп. 1, 7 и 9, о т л и ч а ю щ е е с я тем, что управляемый регулятор тока содержит блок дифференцирования, вход которого является корректирующим входом управляемого регулятора тока. 11. Устройство по пп. 1, 7 и 10, о т л и ч а ю щ е е с я тем, что управляемый регулятор тока дополнительно снабжен блоком дистанционного изменения усилия натяжения нити и сумматором, один вход которого соединен с выходом блока дифференцирован и я , а д р у г о й - с выходом блока дистанционного изменения усилия натяжения нити. 2. Устройство п о п І . о т л и ч а ю щ е е с я тем, что интегратор состоит из двух 12. Устройство по пп. 1 и 4, о т л и ч а ю интегрирующих звеньев с различными по- 55 щ е е с я тем, что рычаг регулятора резерва стоянными времени и эпектронного перенити имеет датчики крайних положений, выключателя, при этом объединенные выходы ходы которых связаны с соответствующими интегрирующих звеньев являются выходом блокирующими входами олока управления интегратора, входом которого является упчастотой вращения вала шагового электроравляющий вход электронного переключадслнателя, 13 1727535 14 13. Устройство по п. 1, о т л и ч а ю управляющему входу переключающего касщ е е с я тем, что оно снабжено генера гором када, причем первый вход входного пересинхроимпульсов, дополнительным преобключающего каскада является первым разователем частота - напряжение и компавходом блока управления частотой вращератором, а блок управления частотой ния вала шагового электродвигателя, а втовращения шагового электродвигателя имерой вход в х о д н о г о п е р е к л ю ч а ю щ е г о ет входной переключающий каскад, при каскада связан с выходом генератора синхэтом выход интегратора соединен с первым роимпульсов. входом компаратора, второй вход которого 14. Устройство по п. 1, о т л и ч а ю через дополнительный преобразователь ча- 10 щ е е с я тем, что преобразователь напрястота - напряжение подключен к выходу жение - частота выполнен с регулируемым генератора синхроимпульсов, а выход - к коэффициентом передачи •17 2 1727535 A-A ^ч\чххч\х\\ч\\
ДивитисяДодаткова інформація
Назва патенту англійськоюThread feeding device with electronic control of thread tension
Назва патенту російськоюНитеподающее устройство с электронной регулировкой напряжения нити
МПК / Мітки
МПК: D04B 15/38
Мітки: пристрій, електронним, нитки, регулюванням, натягування, ниткоподавальний
Код посилання
<a href="https://ua.patents.su/20-7618-nitkopodavalnijj-pristrijj-z-elektronnim-regulyuvannyam-natyaguvannya-nitki.html" target="_blank" rel="follow" title="База патентів України">Ниткоподавальний пристрій з електронним регулюванням натягування нитки</a>
Пристрій для розкладання нитки на пакуванні

Номер патенту: 650
Опубліковано: 15.12.1993
Автори: Зінченко Анатолій Іванович, Атаманенко Леонід Анатолійович
МПК: B65H 54/28
Мітки: нитки, пристрій, пакуванні, розкладання
Формула / Реферат:
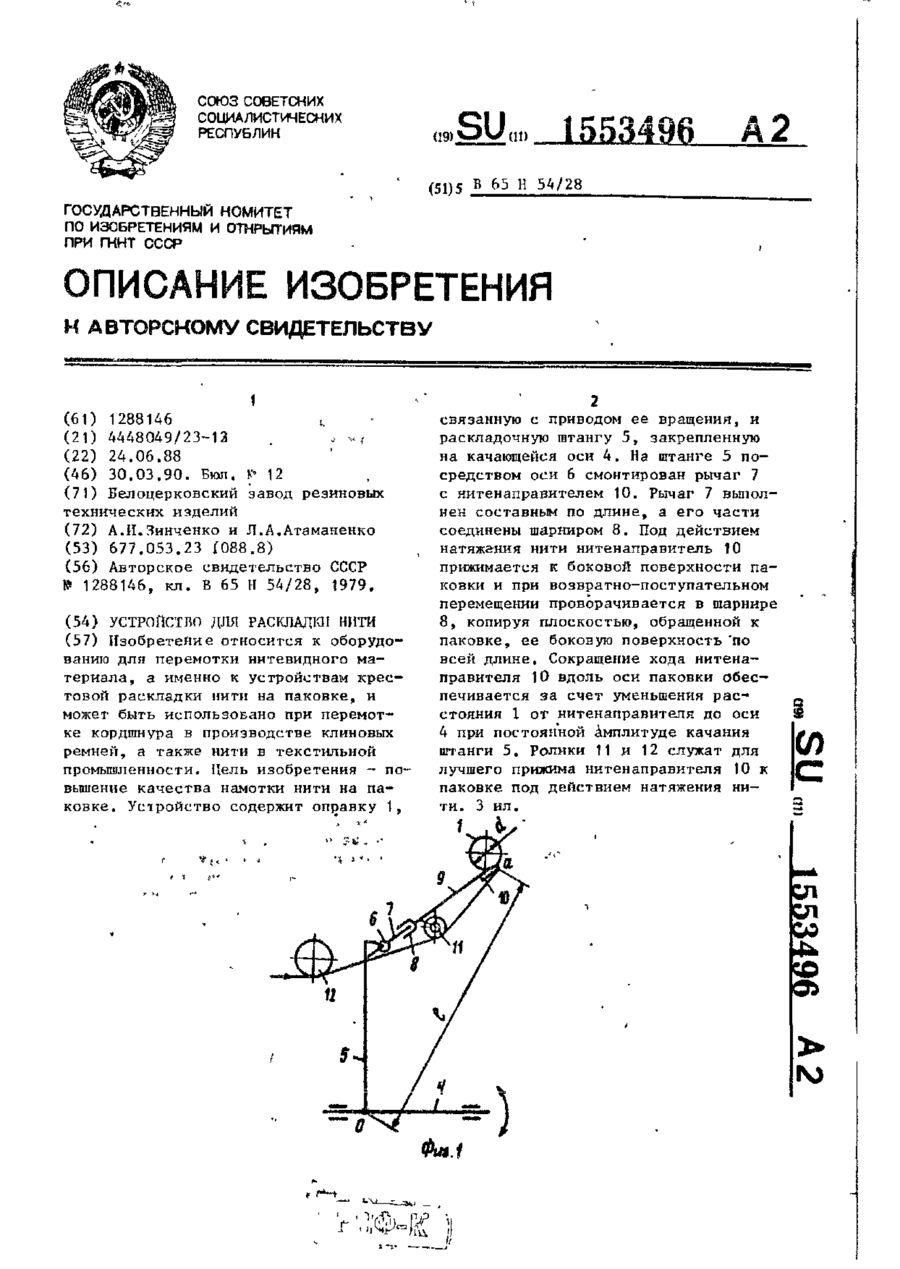
Формула изобретения1. Устройство для раскладки нити на паковке, содержащее раскладочную штангу, установленную с возможностью качания в плоскости, параллельной оси паковки, рычаг с нитенаправителем, смонтированный на свободном конце штанги с возможностью поворота относительно оси, перпендикулярной оси качания штанги, для прижима к боковой поверхности паковки от натяжения нити, отличающееся тем, что, с целью расширения технологических...
Пристрій для розкладання нитки
Номер патенту: 649
Опубліковано: 15.12.1993
Автори: Атаманенко Леонід Анатолійович, Зінченко Анатолій Іванович
МПК: B65H 54/28
Мітки: розкладання, нитки, пристрій
Формула / Реферат:
Устройство для раскладки нити по авт. св, №1288146, отличающееся тем, что, с целью повышения качества намотки, рычаг выполнен составным по длине из двух шарнирно соединенных частей, при этом ось шарнира расположена вдоль рычага, а нитепроводящий ролик закреплен на консольной части рычага.
Пристрій управління подачею нитки до основов’язальної машини
Номер патенту: 327
Опубліковано: 30.04.1993
Автори: Гандельман Йосип Львович, Шац Аркадій Мотелевич
МПК: D04B 27/00
Мітки: управління, подачею, нитки, пристрій, машини, основов'язальної
Формула / Реферат:
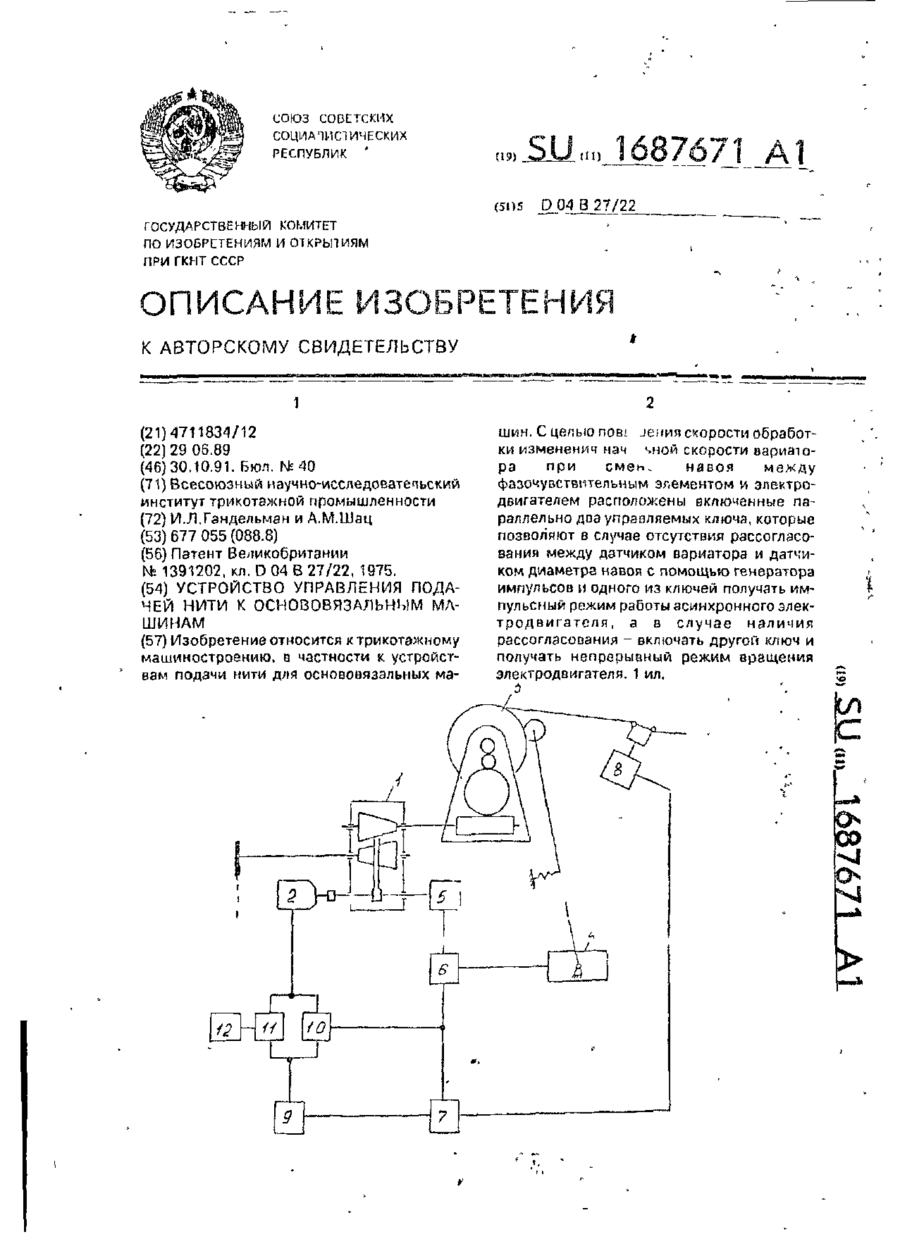
Формула изобретения Устройство управления подачей нити к сснароияоапьчым wu инзм, содержащее д*н г и і о 'j ч1 'И'1 v isujria Формула изобретенияУстройство управления подачей нити к основовязальным машинам, содержащее датчики положения вариатора скорости и диаметра навоя, подключенные через компаратор к первому входу сумматора, вторые входом связанного с датчиком натяжения нити, а выходом через фазочувствительный блок - с входом...
Пристрій для розмотування нитки
Номер патенту: 301
Опубліковано: 30.04.1993
Автори: Яблоков Борис Васильович, Яблокова Світлана Петрівна
МПК: B65H 49/00
Мітки: розмотування, нитки, пристрій
Формула / Реферат:
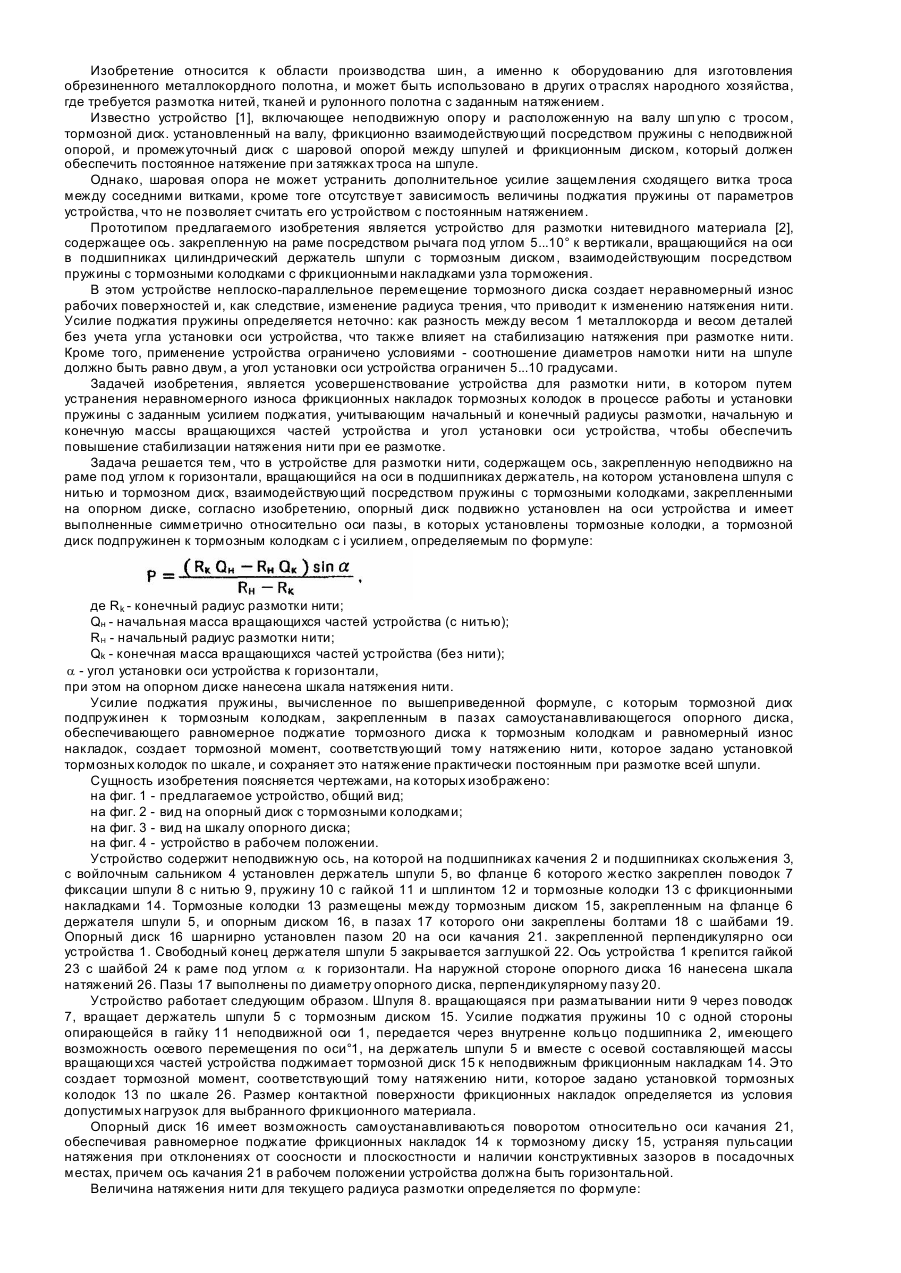
1. Устройство для размотки нити, содержащее ось. закрепленную неподвижно на раме под углом к горизонтали, вращающийся на оси в подшипниках держатель, на котором установлена шпуля с нитью и тормозной диск, взаимодействующий посредством пружины с тормозными колодками, закрепленными на опорном диске, отличающееся тем, что опорный диск подвижно установлен на оси устройства и имеет выполненные симметрично относительно оси пазы, в которых...
Пристрій для одержання армованої нитки
Номер патенту: 558
Опубліковано: 15.12.1993
Автори: Калін Михайло Миколайович, Гаврилюк Микола Семенович, Чувашов Юрій Миколайович, Шусть Емма Олександрівна, Сергєєв Володимир Петрович, Мироненко Аркадій Іванович, Божко Василь Іванович, Гулько Лариса Петрівна, Тутаков Олег Васильович
Мітки: пристрій, одержання, нитки, армованої
Формула / Реферат:
1. Устройство для получения армированной нити. содержащее узел подачи стержневой нити к ванне для клеящего вещества, камеру для нанесения волокон на стержневую нить, выполненную с каналом для вывода армированной нити, узел сушки армированной нити, узел ее намотки на паковку и средство для формирования воздушно-волокнистого потока и подачи его в камеру по ее питающему отверстию перпендикулярно направлению движения стержневой нити, отличающееся...
Попередній патент: Спосіб виготовлення харчового продукту
Наступний патент: Склад для передпосівної обробки насіння озимих зернових культур
Випадковий патент: Вагововимірювальний пристрій