Ітеративне оцінювання і декодування каналів і перешкод





Формула / Реферат
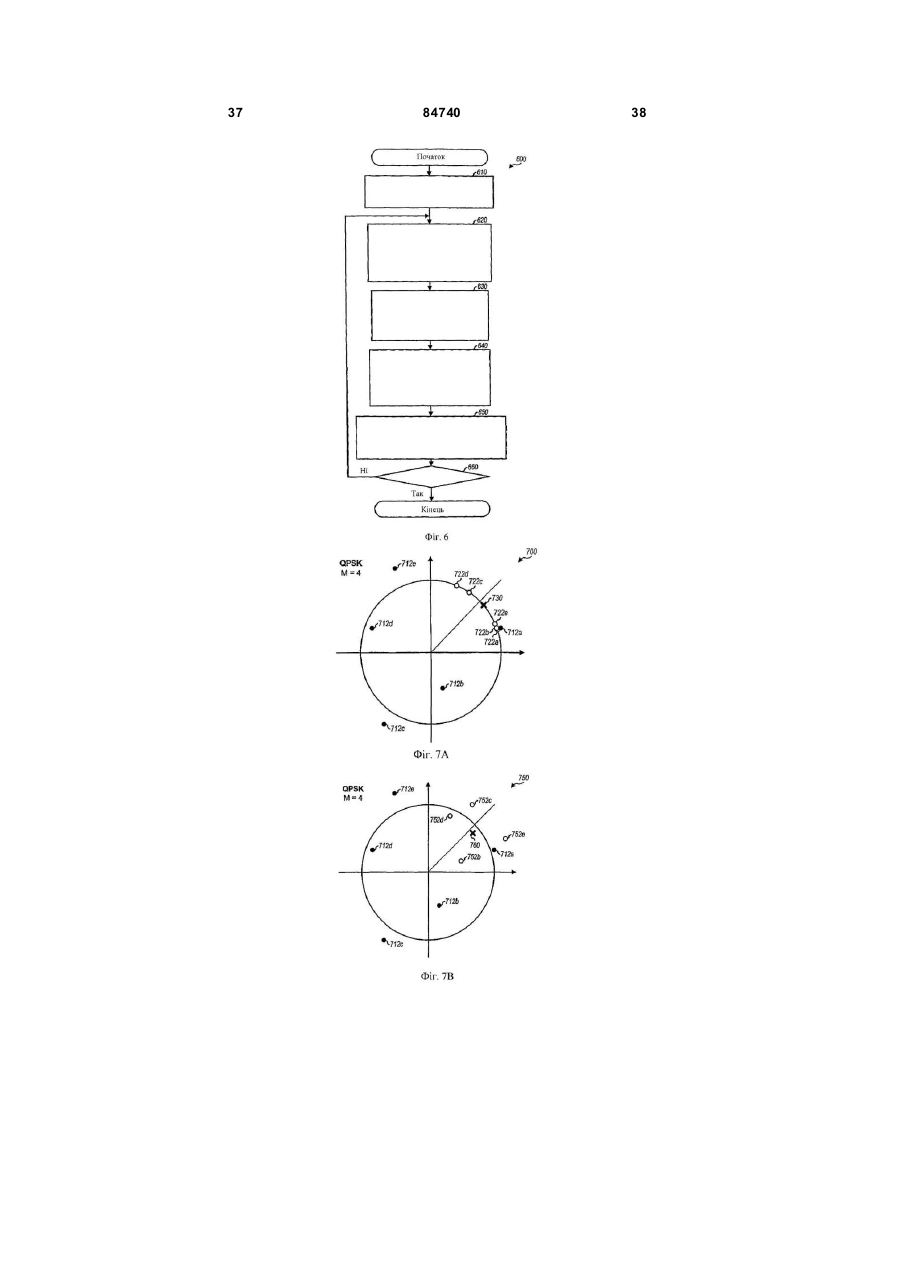
1. Спосіб відновлення даних в системі безпровідного зв'язку, який включає отримання апріорної інформації для посилення каналу і перешкоди;
виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди;
декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних;
виведення апостеріорної інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних, на основі інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних; і
об'єднання апостеріорної інформації для посилення каналу і перешкоди для прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди для отримання оновленої інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних.
2. Спосіб за п. 1, який додатково включає повторення виведення випереджувальної інформації для щонайменше однієї додаткової ітерації на основі оновленої інформації для посилення каналу і перешкоди.
3. Спосіб за п. 1, який додатково включає повторення виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому випереджувальна інформація виводиться на основі апріорної інформації для посилення каналу і перешкоди для першої ітерації і на основі оновленої інформації для посилення каналу і перешкоди для кожної подальшої ітерації.
4. Спосіб за п. 1, в якому випереджувальна інформація і інформація зворотного зв'язку для кодових бітів, відповідних кожному прийнятому символу даних, представлена логарифмічними відношеннями правдоподібності (LLR) для кодових бітів.
5. Спосіб за п. 1, в якому апріорна інформація для посилення каналу і перешкоди, апостеріорна інформація для посилення каналу і перешкоди для кожного прийнятого символу даних і оновлена інформація для посилення каналу і перешкоди для кожного прийнятого символу даних представлені спільним розподілом імовірності по посиленню каналу і перешкоді.
6. Спосіб за п. 1, в якому кожний спільний розподіл імовірності квантований на певне число значень для зниження складності.
7. Спосіб за п. 1, в якому попередньо визначенечисло значень вибирається на основі точок з максимальною імовірністю у спільному розподілі імовірності.
8. Спосіб за п. 1, в якому попередньо визначене число значень скорочується для кожної подальшої ітерації виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації.
9. Спосіб за п. 1, в якому оновлена інформація для посилення каналу і перешкоди для кожного прийнятого символу даних виходить шляхом об'єднання апріорної інформації для посилення каналу і перешкоди і апостеріорної інформації для посилення каналу і перешкоди для інших з прийнятих символів даних.
10. Спосіб за п. 1, в якому апріорна інформація для посилення каналу і перешкоди виходить на основі прийнятих символів пілот-сигналу.
11. Спосіб за. п. 1, в якому посилення каналу включає в себе амплітуду каналу і фазу каналу, при цьому амплітуда каналу визначається неітераційним способом, і при цьому апріорна інформація, апостеріорна інформація і оновлена інформація отримуються для фази каналу і перешкоди.
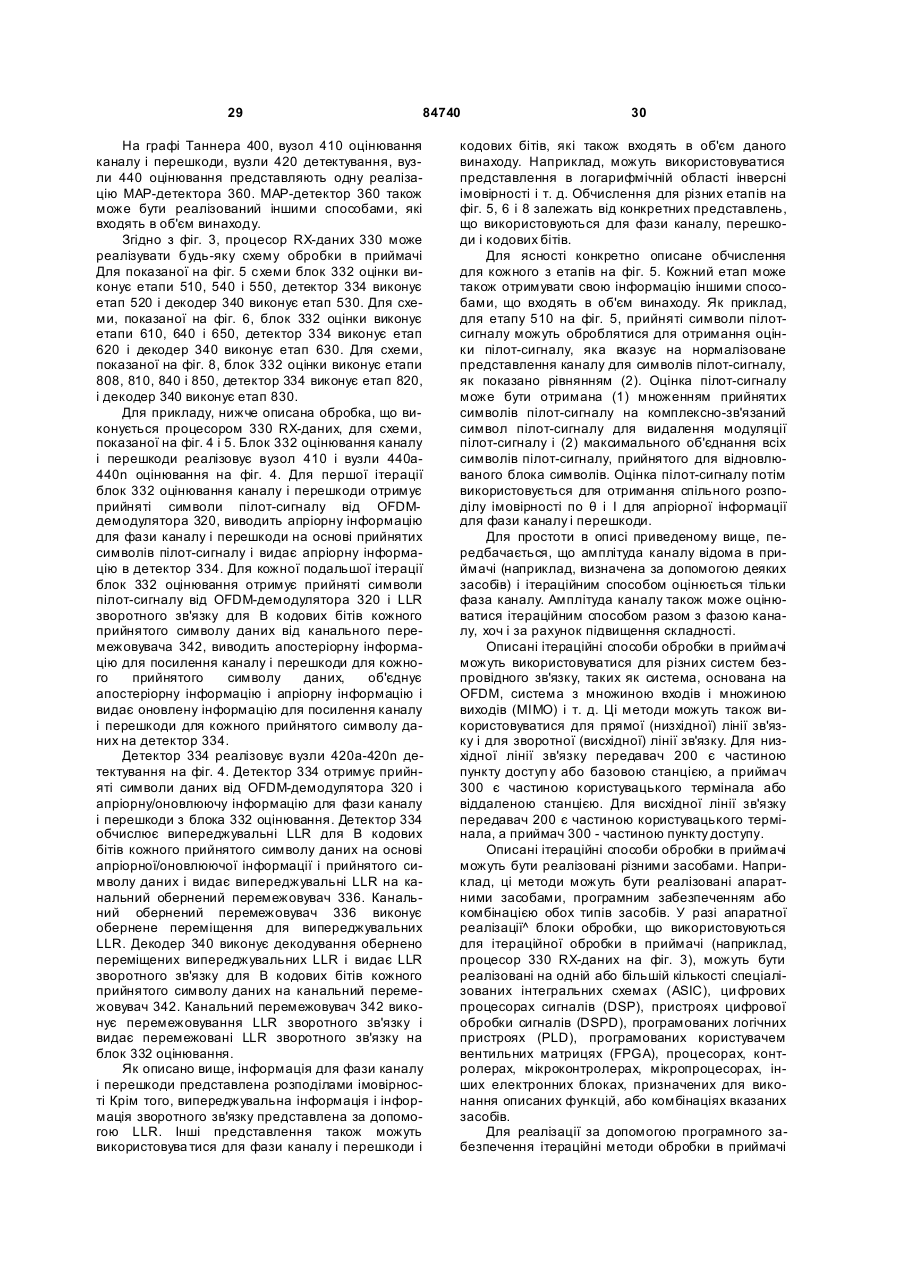
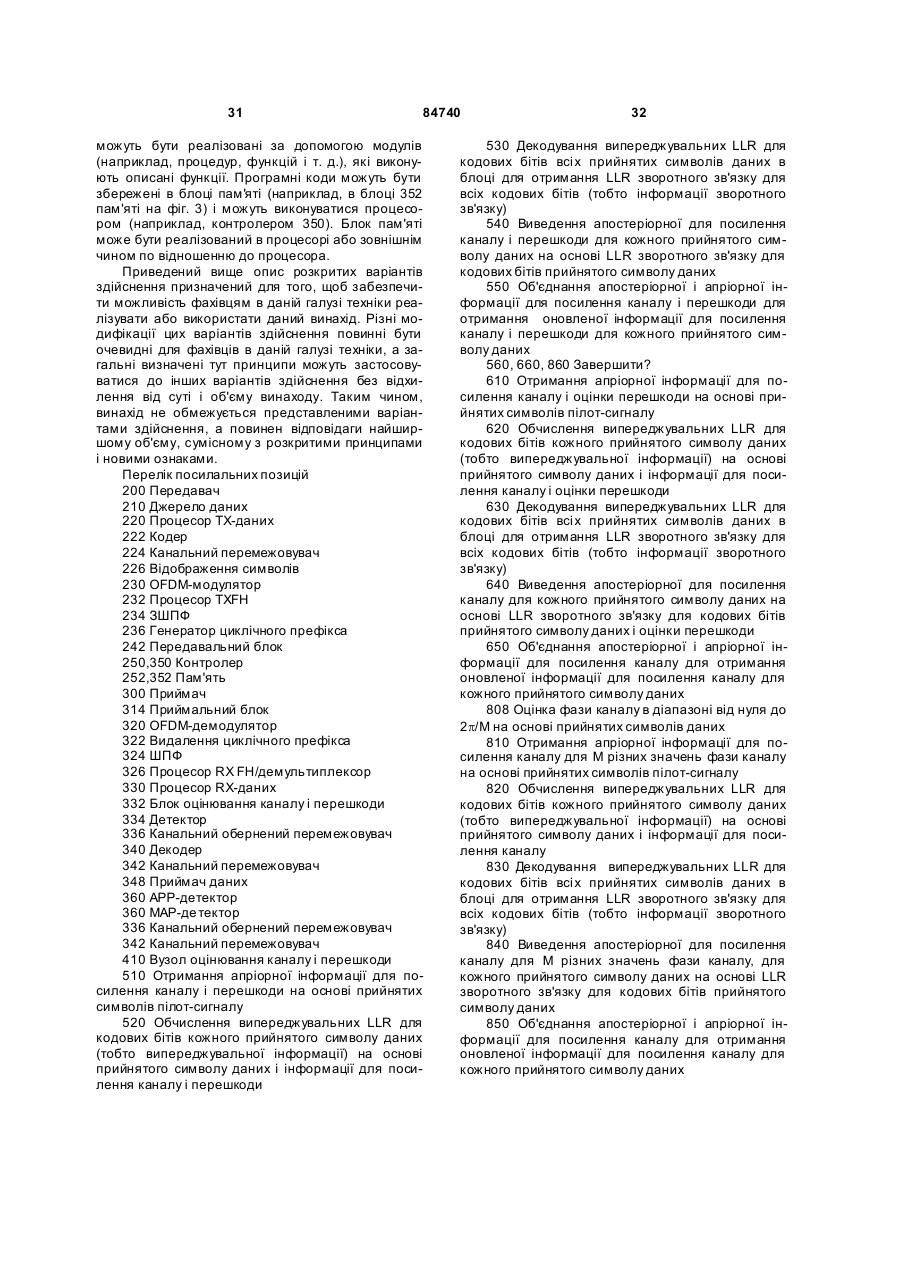
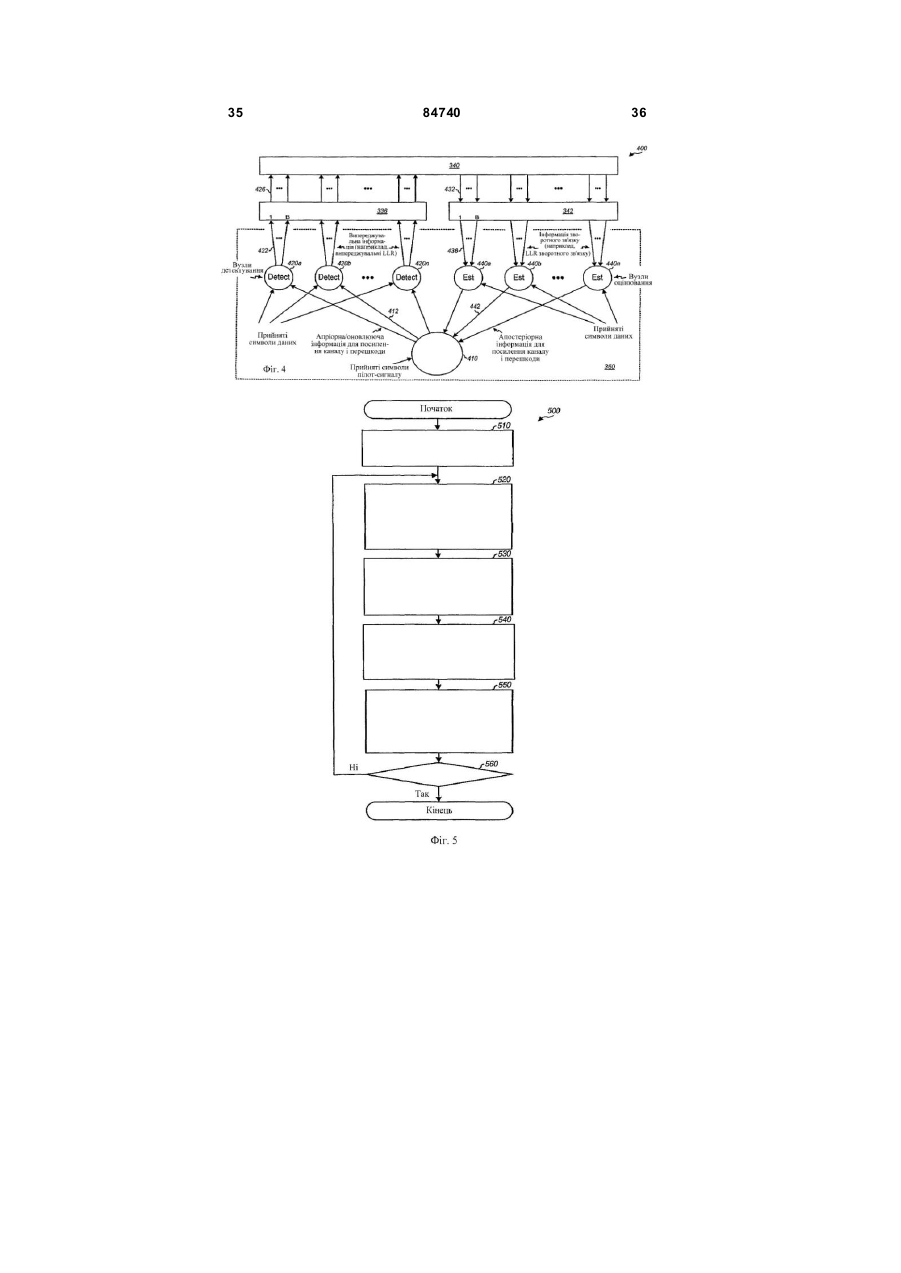
12. Приймач в системі безпровідного зв'язку, який містить
детектор, призначений для отримання апріорної інформації для посилення каналу і перешкоди і виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, і
декодер, призначений для декодування випереджувальної інформації і забезпечення інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних, і
при цьому детектор додатково призначений для виведення оновленої інформації для посилення каналу і перешкоди з використанням інформації зворотного зв'язку, причому детектор і декодер призначені для обміну випереджувальною інформацією і інформацією зворотного зв'язку для множини ітерації.
13. Приймач за п. 12, в якому детектор є детектором апостеріорної імовірності (АРР).
14. Приймач за п.12, в якому детектор додатково використовує прийняті символи даних і прийняті символи пілот-сигналу для виведення оновленої інформації для посилення каналу і перешкоди.
15. Приймач за п. 12, в якому випереджувальна інформація і інформація зворотного зв'язку представлені логарифмічними відношеннями правдоподібності (LLR) для кодових бітів, відповідних прийнятим символам даних.
16. Приймач в системі безпровідного зв'язку, який містить
блок оцінювання, призначений для отримання апріорної інформації для посилення каналу і перешкоди;
детектор, призначений для виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних на основі прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди і
декодер, призначений для декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних, і
при цьому блок оцінювання додатково призначений для виведення апостеріорної інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних на основі інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних, і для об'єднання апостеріорної інформації для посилення каналу і перешкоди для прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди для отримання оновленої інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних.
17. Приймач за п. 16, в якому блок оцінювання, детектор і декодер призначені для виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому детектор призначений для виведення випереджувальної інформації на основі апріорної інформації для посилення каналу і перешкоди для першої ітерації і на основі оновленої інформації для посилення каналу і перешкоди для кожної наступної ітерації.
18. Приймач за п. 16, в якому система безпровідного зв'язку є системою зв'язку з мультиплексуванням на основі ортогонального частотного розділення (OFDM).
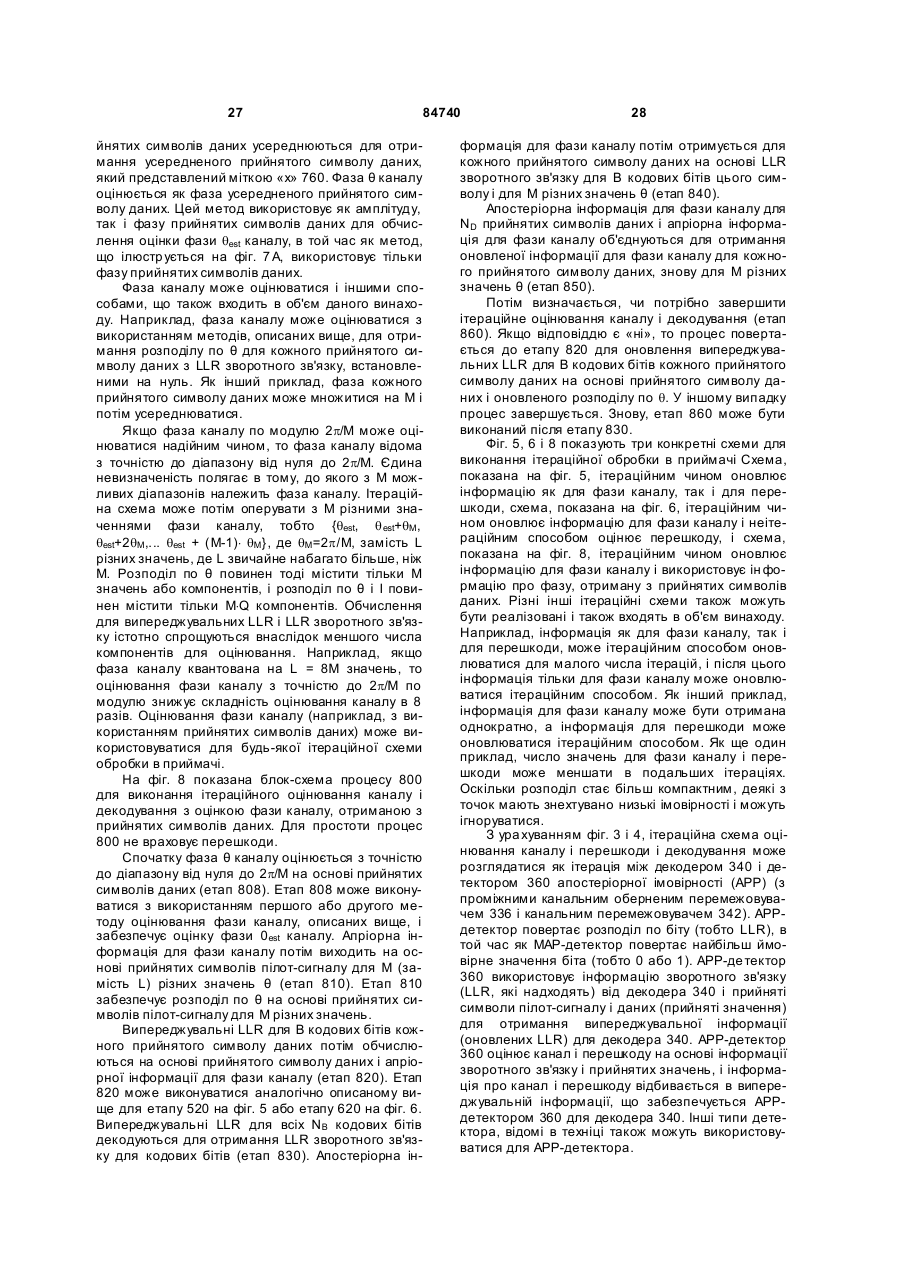
19. Приймач за п. 16, в якому система безпровідного зв'язку є системою зв'язку зі стрибкоподібною зміною частоти.
20. Пристрій обробки інформації для отримання оновленої інформації для посилення каналу і перешкоди в системі безпровідного зв'язку, який містить
засіб для отримання апріорної інформації для посилення каналу і перешкоди;
засіб для виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди;
засіб для декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних;
засіб для виведення апостеріорної інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних на основі інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних; і
засіб для об'єднання апостеріорної інформації для посилення каналу і перешкоди для прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди для отримання оновленої інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних.
21. Пристрій за п. 20, який додатково містить засіб для повторення виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому випереджувальна інформація виводиться на основі апріорної інформації для посилення каналу і перешкоди для першої ітерації і на основі оновленої інформації для посилення каналу і перешкоди для кожної подальшої ітерації.
22. Зчитуваний процесором носій для зберігання інструкцій, призначених для
отримання апріорної інформації для посилення каналу і перешкоди;
виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди;
декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних;
виведення апостеріорної інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних на основі інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних; і
об'єднання апостеріорної інформації для посилення каналу і перешкоди для прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди для отримання оновленої інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних.
23. Зчитуваний процесором носій за п. 22, в якому інструкції додатково призначені для повторення виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому випереджувальна інформація виводиться на основі апріорної інформації для посилення каналу і перешкоди для першої ітерації і на основі оновленої інформації для посилення каналу і перешкоди для кожної подальшої ітерації.
24. Спосіб відновлення даних в системі безпровідного зв'язку, який включає
отримання апріорної інформації для посилення каналу і перешкоди на основі прийнятих символів пілот-сигналу;
обчислення випереджувальних логарифмічних відношень правдоподібності (LLR) для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди;
декодування випереджувальних LLR для кодових бітів для отримання LLR зворотного зв'язку для кодових бітів;
виведення апостеріорної інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних на основі LLR зворотному зв'язку для кодових бітів прийнятого символу даних і
об'єднання апостеріорної інформації для посилення каналу і перешкоди для прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди для отримання оновленої інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних.
25. Спосіб за п. 24, який додатково включає повторення обчислення випереджувальних LLR, декодування випереджувальних LLR, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, причому випереджувальні LLR обчислюються на основі апріорної інформації для посилення каналу і перешкоди для першої ітерації і на основі оновленої інформації для посилення каналу і перешкоди для кожної подальшої ітерації.
26. Спосіб за п. 24, в якому посилення каналу включає в себе амплітуду каналу і фазу каналу, причому амплітуда каналу визначається неітераційним способом, і при цьому апріорна інформація, апостеріорна інформація і оновлена інформація отримуються для фази каналу і перешкоди.
27. Спосіб за п. 26, в якому отримання апріорної інформації для фази каналу і перешкоди, включає в себе
обчислення спільного розподілу імовірності по фазі каналу і перешкоді для кожного щонайменше одного прийнятого символу пілот-сигналу, і
об'єднання щонайменше одного спільного розподілу імовірності по фазі каналу і перешкоді для кожного щонайменше одного прийнятого символу пілот-сигналу для отримання складового спільного розподілу імовірності по фазі каналу і перешкоді, при цьому апріорна інформація про фазу каналу і перешкоду містить складовий спільний розподіл імовірності по фазі каналу і перешкоді.
28. Спосіб за п. 24, в якому обчислення випереджувальних LLR для кожного з прийнятих символів даних включає в себе
обчислення розподілу імовірності по значенню х символу даних на основі прийнятого символу даних і спільного розподілу імовірності по фазі каналу і перешкоді для прийнятого символу даних, і
виведення випереджувальних LLR для кодових бітів прийнятого символу даних на основі розподілу імовірності по х.
29. Спосіб за п. 24, в якому декодування виконується за допомогою декодера максимуму апостеріорної імовірності (МАР) або декодера Вітербі з м'яким виходом (SOV).
30. Спосіб за п. 24, в якому декодування виконується з використанням однієї або більшої кількості ітерацій турбодекодера або декодера з контролем парності низької щільності (LDPC).
31. Спосіб відновлення даних в системі безпровідного зв'язку, що включає
отримання апріорної інформації для посилення каналу;
отримання оцінки перешкоди;
виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних, апріорної інформації для посилення каналу і оцінки перешкоди;
декодування апріорної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних;
виведення апостеріорної інформації для посилення каналу для кожного з прим'ятих символів даних на основі оцінки перешкоди і інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних, і
об'єднання апостеріорної інформації для посилення каналу для прийнятих символів даних і апріорної інформації для посилення каналу для отримання оновленої інформації для посилення каналу для кожного з прийнятих символів даних.
32. Спосіб за п. 31, який додатково включає повторення виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому випереджувальна інформація виводиться на основі апріорної інформації для посилення каналу для першої ітерації і на основі оновленої інформації для посилення каналу для кожної подальшої ітерації.
33. Спосіб за п. 31, в якому випереджувальна інформація і інформація зворотного зв'язку для кодових бітів, відповідних кожному прийнятому символу даних, представлена логарифмічними відношеннями правдоподібності (LLR) для кодових бітів.
34. Спосіб за п. 31, в якому апріорна інформація для посилення каналу, апостеріорна інформація для посилення каналу для кожного прийнятого символу даних і оновлена інформація для посилення каналу для кожного прийнятого символу даних представлені розподілом імовірності по посиленню каналу.
35. Спосіб за п. 31, в якому апріорна інформація для посилення каналу і оцінка перешкоди отримуються на основі прийнятих символів пілот-сигналу.
36. Спосіб за п. 31, в якому посилення каналу включає в себе амплітуду каналу і фазу каналу, причому амплітуда каналу визначається неітераційним способом, і при цьому апріорна інформація, апостеріорна інформація і оновлена інформація отримуються для фази каналу.
37. Спосіб за п. 31, в якому отримання апріорної інформації для фази каналу і оцінки перешкоди включає в себе
обчислення спільного розподілу імовірності по фазі каналу і перешкоді на основі щонайменше одного прийнятого символу пілот-сигналу, і
виведення розподілу імовірності по фазі каналу і розподілу імовірності по перешкоді на основі спільного розподілу імовірності по фазі каналу і перешкоді, при цьому апріорна інформація для фази каналу містить розподіл імовірності по фазі каналу, і
отримання оцінки перешкоди на основі розподілу по перешкоді.
38. Приймач в системі безпровідного зв'язку, який містить
блок оцінювання, призначений для отримання апріорної інформації для посилення каналу і оцінки перешкоди;
детектор, призначений для виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу і оцінки перешкоди і
декодер, призначений для декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних, і
при цьому блок оцінювання додатково призначений для виведення апостеріорної інформації для посилення каналу для кожного з прийнятих символів даних на основі оцінки перешкоди і інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних, і для об'єднання апостеріорної інформації для посилення каналу для прийнятих символів даних і апріорної інформації для посилення каналу для отримання оновленої інформації для посилення каналу для кожного з прийнятих символів даних.
39. Приймач за п. 38, в якому блок оцінювання, детектор і декодер призначені для виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому детектор призначений для виведення випереджувальної інформації на основі апріорної інформації для посилення каналу для першої ітерації і на основі оновленої інформації для посилення каналу для подальшої ітерації.
40. Пристрій обробки інформації для отримання оновленої інформації для посилення каналу і перешкоди в системі безпровідного зв'язку, який містить
засіб для отримання апріорної інформації для посилення каналу;
засіб для отримання оцінки перешкоди;
засіб для виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних, апріорної інформації для посилення каналу і оцінки перешкоди;
засіб для декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних;
засіб для виведення апостеріорної інформації для посилення каналу для кожного з прийнятих символів даних на основі оцінки перешкоди і інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних; і
засіб для об'єднання апостеріорної інформації для посилення каналу для прийнятих символів даних і апріорної інформації для посилення каналу для отримання оновленої інформації для посилення каналу для кожного з прийнятих символів даних.
41. Пристрій за п. 40, який додатково містить засіб для повторення виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому випереджувальна інформація виводиться на основі апріорної інформації для посилення каналу для першої ітерації і на основі оновленої інформації для посилення каналу для кожної подальшої ітерації.
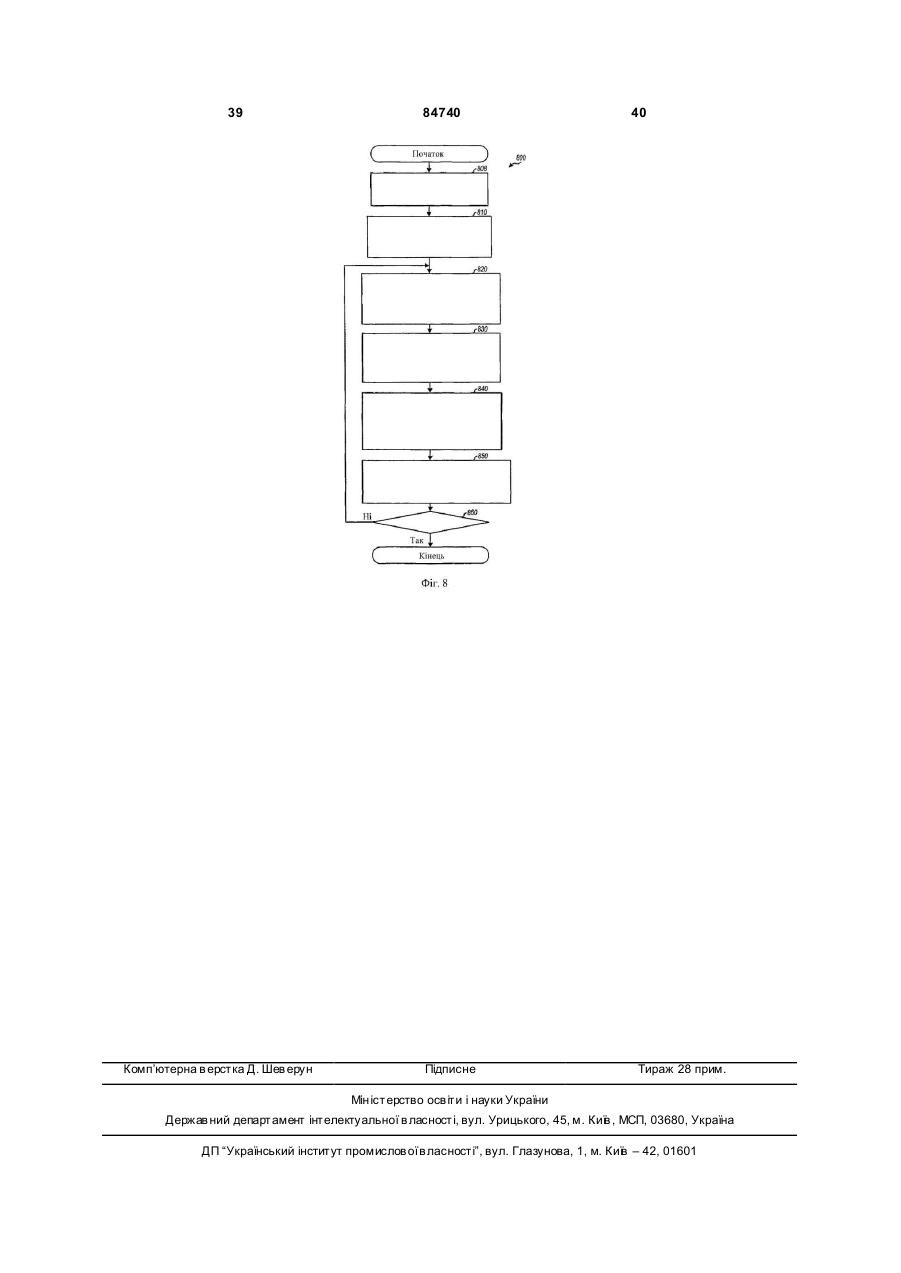
42. Спосіб виконання оцінювання фази каналу в системі безпровідного зв'язку, який включає
виконання неітераційного оцінювання фази каналу на основі прийнятих символів для отримання набору гіпотез для фази каналу, причому набір гіпотез є піднабором всіх можливих гіпотез для фази каналу; і
виконання ітераційного, направленого на дані оцінювання фази каналу на основі набору гіпотез і прийнятих символів даних для отримання остаточної оцінки фази каналу, вибраній з набору гіпотез.
43. Спосіб за п. 42, в якому набір М гіпотез включає в себе М фаз, рознесених на 2 π/М, для схеми модуляції на основі М-кової фазової маніпуляції (PSK), що використовується для прийнятих символів даних.
44. Спосіб за п. 42, який додатково містить виконання ітераційного детектування і декодування для прийнятих символів даних з використанням набору гіпотез для фази каналу.
45. Спосіб відновлення даних в системі безпровідного зв'язку, який включає
отримання оцінки фази каналу на основі прийнятих символів;
отримання апріорної інформації для посилення каналу на основі прийнятих символів пілот-сигналу і оцінки фази каналу;
виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу;
декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних;
виведення апостеріорної інформації для посилення каналу для кожного з прийнятих символів даних на основі оцінки фази каналу і інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних; і
об'єднання апостеріорної інформації для посилення каналу для прийнятих символів даних і апріорної інформації для посилення каналу для отримання оновленої інформації для посилення каналу для кожного з прийнятих символів даних,
46. Спосіб за п. 45, в якому оцінка фази каналу представлена набором М гіпотез для фази каналу, де М більше ніж 1.
47. Спосіб за п. 45, який додатково включає повторення виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому випереджувальна інформація виводиться на основі апріорної інформації для посилення каналу для першої ітерації і на основі оновленої інформації для посилення каналу для кожної подальшої ітерації.
48. Спосіб за п. 45, в якому прийняті символи даних виводяться зі схеми модуляції на основі М-кової фазової маніпуляції (PSK), де М>2.
49. Спосіб за п. 48, в якому апріорна інформація, апостеріорна інформація і оновлена інформація містять по М компонентів кожна для М різних значень фази каналу.
50. Спосіб за п. 45, в якому отримання оцінки фази каналу включає в себе
визначення фази кожного з прийнятих символів даних;
поворот фази кожного з прийнятих символів даних, якщо необхідно, для забезпечення знаходження в діапазоні значень, і
обчислення оцінки фази каналу на основі повернених фаз для прийнятих символів даних.
51. Спосіб за п. 45, в якому отримання оцінки фази каналу включає в себе
поворот кожного з прийнятих символів даних, якщо необхідно, для забезпечення знаходження фази поверненого прийнятого символу даних в діапазоні значень;
обчислення усередненого прийнятого символу даних на основі повернених прийнятих символів даних, і
обчислення оцінки фази каналу на основі усереднених прийнятих символів
даних.
52. Приймач в системі безпровідного зв'язку, який містить блок оцінювання, призначений для отримання оцінки фази каналу на основі прийнятих символів даних і для отримання апріорної інформації для посилення каналу на основі прийнятих символів пілот-сигналу і оцінки фази каналу;
детектор, призначений для виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу і
декодер, призначений для декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних, і
при цьому блок оцінювання додатково призначений для виведення апостеріорної інформації для посилення каналу на основі оцінки фази каналу і інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних, і для об'єднання апостеріорної інформації для посилення каналу і апріорної інформації для посилення каналу для отримання оновленої інформації для посилення каналу.
53. Пристрій обробки інформації для отримання оновленої інформації для посилення каналу і перешкоди в системі безпровідного зв'язку, який містить
засіб для отримання оцінки фази каналу на основі прийнятих символів даних;
засіб для отримання апріорної інформації для посилення каналу на основі прийнятих символів пілот-сигналу і оцінки фази каналу;
засіб для виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу;
засіб для декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних, і
засіб для виведення апостеріорної інформації для посилення каналу на основі оцінки фази каналу і інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних, і
засіб для об'єднання апостеріорної інформації для посилення каналу і апріорної інформації для посилення каналу для отримання оновленої інформації для посилення каналу.
Текст
1. Спосіб відновлення даних в системі безпровідного зв'язку, який включає отримання апріорної інформації для посилення каналу і перешкоди; виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди; декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних; виведення апостеріорної інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних, на основі інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних; і об'єднання апостеріорної інформації для посилення каналу і перешкоди для прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди для отримання оновленої інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних. 2. Спосіб за п. 1, який додатково включає повторення виведення випереджувальної інформації для щонайменше однієї додаткової ітерації на основі оновленої інформації для посилення каналу і перешкоди. 3. Спосіб за п. 1, який додатково включає повторення виведення випереджувальної інформації, декодування випереджувальної інформації, виве 2 (19) 1 3 84740 при цьому амплітуда каналу визначається неітераційним способом, і при цьому апріорна інформація, апостеріорна інформація і оновлена інформація отримуються для фази каналу і перешкоди. 12. Приймач в системі безпровідного зв'язку, який містить детектор, призначений для отримання апріорної інформації для посилення каналу і перешкоди і виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, і декодер, призначений для декодування випереджувальної інформації і забезпечення інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних, і при цьому детектор додатково призначений для виведення оновленої інформації для посилення каналу і перешкоди з використанням інформації зворотного зв'язку, причому детектор і декодер призначені для обміну випереджувальною інформацією і інформацією зворотного зв'язку для множини ітерації. 13. Приймач за п. 12, в якому детектор є детектором апостеріорної імовірності (АРР). 14. Приймач за п.12, в якому детектор додатково використовує прийняті символи даних і прийняті символи пілот-сигналу для виведення оновленої інформації для посилення каналу і перешкоди. 15. Приймач за п. 12, в якому випереджувальна інформація і інформація зворотного зв'язку представлені логарифмічними відношеннями правдоподібності (LLR) для кодових бітів, відповідних прийнятим символам даних. 16. Приймач в системі безпровідного зв'язку, який містить блок оцінювання, призначений для отримання апріорної інформації для посилення каналу і перешкоди; детектор, призначений для виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних на основі прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди і декодер, призначений для декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних, і при цьому блок оцінювання додатково призначений для виведення апостеріорної інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних на основі інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних, і для об'єднання апостеріорної інформації для посилення каналу і перешкоди для прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди для отримання оновленої інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних. 17. Приймач за п. 16, в якому блок оцінювання, детектор і декодер призначені для виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання 4 апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому детектор призначений для виведення випереджувальної інформації на основі апріорної інформації для посилення каналу і перешкоди для першої ітерації і на основі оновленої інформації для посилення каналу і перешкоди для кожної наступної ітерації. 18. Приймач за п. 16, в якому система безпровідного зв'язку є системою зв'язку з мультиплексуванням на основі ортогонального частотного розділення (OFDM). 19. Приймач за п. 16, в якому система безпровідного зв'язку є системою зв'язку зі стрибкоподібною зміною частоти. 20. Пристрій обробки інформації для отримання оновленої інформації для посилення каналу і перешкоди в системі безпровідного зв'язку, який містить засіб для отримання апріорної інформації для посилення каналу і перешкоди; засіб для виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди; засіб для декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних; засіб для виведення апостеріорної інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних на основі інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних; і засіб для об'єднання апостеріорної інформації для посилення каналу і перешкоди для прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди для отримання оновленої інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних. 21. Пристрій за п. 20, який додатково містить засіб для повторення виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому випереджувальна інформація виводиться на основі апріорної інформації для посилення каналу і перешкоди для першої ітерації і на основі оновленої інформації для посилення каналу і перешкоди для кожної подальшої ітерації. 22. Зчитуваний процесором носій для зберігання інструкцій, призначених для отримання апріорної інформації для посилення каналу і перешкоди; виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди; декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних; 5 84740 виведення апостеріорної інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних на основі інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних; і об'єднання апостеріорної інформації для посилення каналу і перешкоди для прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди для отримання оновленої інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних. 23. Зчитуваний процесором носій за п. 22, в якому інструкції додатково призначені для повторення виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому випереджувальна інформація виводиться на основі апріорної інформації для посилення каналу і перешкоди для першої ітерації і на основі оновленої інформації для посилення каналу і перешкоди для кожної подальшої ітерації. 24. Спосіб відновлення даних в системі безпровідного зв'язку, який включає отримання апріорної інформації для посилення каналу і перешкоди на основі прийнятих символів пілот-сигналу; обчислення випереджувальних логарифмічних відношень правдоподібності (LLR) для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди; декодування випереджувальних LLR для кодових бітів для отримання LLR зворотного зв'язку для кодових бітів; виведення апостеріорної інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних на основі LLR зворотному зв'язку для кодових бітів прийнятого символу даних і об'єднання апостеріорної інформації для посилення каналу і перешкоди для прийнятих символів даних і апріорної інформації для посилення каналу і перешкоди для отримання оновленої інформації для посилення каналу і перешкоди для кожного з прийнятих символів даних. 25. Спосіб за п. 24, який додатково включає повторення обчислення випереджувальних LLR, декодування випереджувальних LLR, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, причому випереджувальні LLR обчислюються на основі апріорної інформації для посилення каналу і перешкоди для першої ітерації і на основі оновленої інформації для посилення каналу і перешкоди для кожної подальшої ітерації. 26. Спосіб за п. 24, в якому посилення каналу включає в себе амплітуду каналу і фазу каналу, причому амплітуда каналу визначається неітераційним способом, і при цьому апріорна інформація, апостеріорна інформація і оновлена інформація отримуються для фази каналу і перешкоди. 6 27. Спосіб за п. 26, в якому отримання апріорної інформації для фази каналу і перешкоди, включає в себе обчислення спільного розподілу імовірності по фазі каналу і перешкоді для кожного щонайменше одного прийнятого символу пілот-сигналу, і об'єднання щонайменше одного спільного розподілу імовірності по фазі каналу і перешкоді для кожного щонайменше одного прийнятого символу пілот-сигналу для отримання складового спільного розподілу імовірності по фазі каналу і перешкоді, при цьому апріорна інформація про фазу каналу і перешкоду містить складовий спільний розподіл імовірності по фазі каналу і перешкоді. 28. Спосіб за п. 24, в якому обчислення випереджувальних LLR для кожного з прийнятих символів даних включає в себе обчислення розподілу імовірності по значенню х символу даних на основі прийнятого символу даних і спільного розподілу імовірності по фазі каналу і перешкоді для прийнятого символу даних, і виведення випереджувальних LLR для кодових бітів прийнятого символу даних на основі розподілу імовірності по х. 29. Спосіб за п. 24, в якому декодування виконується за допомогою декодера максимуму апостеріорної імовірності (МАР) або декодера Вітербі з м'я ким виходом (SOV). 30. Спосіб за п. 24, в якому декодування виконується з використанням однієї або більшої кількості ітерацій турбодекодера або декодера з контролем парності низької щільності (LDPC). 31. Спосіб відновлення даних в системі безпровідного зв'язку, що включає отримання апріорної інформації для посилення каналу; отримання оцінки перешкоди; виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних, апріорної інформації для посилення каналу і оцінки перешкоди; декодування апріорної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних; виведення апостеріорної інформації для посилення каналу для кожного з прим'ятих символів даних на основі оцінки перешкоди і інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних, і об'єднання апостеріорної інформації для посилення каналу для прийнятих символів даних і апріорної інформації для посилення каналу для отримання оновленої інформації для посилення каналу для кожного з прийнятих символів даних. 32. Спосіб за п. 31, який додатково включає повторення виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому випереджувальна інформація виводиться на основі апріорної інформації для посилення каналу для першої ітерації і на основі оновленої інформації 7 84740 для посилення каналу для кожної подальшої ітерації. 33. Спосіб за п. 31, в якому випереджувальна інформація і інформація зворотного зв'язку для кодових бітів, відповідних кожному прийнятому символу даних, представлена логарифмічними відношеннями правдоподібності (LLR) для кодових бітів. 34. Спосіб за п. 31, в якому апріорна інформація для посилення каналу, апостеріорна інформація для посилення каналу для кожного прийнятого символу даних і оновлена інформація для посилення каналу для кожного прийнятого символу даних представлені розподілом імовірності по посиленню каналу. 35. Спосіб за п. 31, в якому апріорна інформація для посилення каналу і оцінка перешкоди отримуються на основі прийнятих символів пілот-сигналу. 36. Спосіб за п. 31, в якому посилення каналу включає в себе амплітуду каналу і фазу каналу, причому амплітуда каналу визначається неітераційним способом, і при цьому апріорна інформація, апостеріорна інформація і оновлена інформація отримуються для фази каналу. 37. Спосіб за п. 31, в якому отримання апріорної інформації для фази каналу і оцінки перешкоди включає в себе обчислення спільного розподілу імовірності по фазі каналу і перешкоді на основі щонайменше одного прийнятого символу пілот-сигналу, і виведення розподілу імовірності по фазі каналу і розподілу імовірності по перешкоді на основі спільного розподілу імовірності по фазі каналу і перешкоді, при цьому апріорна інформація для фази каналу містить розподіл імовірності по фазі каналу, і отримання оцінки перешкоди на основі розподілу по перешкоді. 38. Приймач в системі безпровідного зв'язку, який містить блок оцінювання, призначений для отримання апріорної інформації для посилення каналу і оцінки перешкоди; детектор, призначений для виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу і оцінки перешкоди і декодер, призначений для декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних, і при цьому блок оцінювання додатково призначений для виведення апостеріорної інформації для посилення каналу для кожного з прийнятих символів даних на основі оцінки перешкоди і інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних, і для об'єднання апостеріорної інформації для посилення каналу для прийнятих символів даних і апріорної інформації для посилення каналу для отримання оновленої інформації для посилення каналу для кожного з прийнятих символів даних. 39. Приймач за п. 38, в якому блок оцінювання, детектор і декодер призначені для виведення 8 випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому детектор призначений для виведення випереджувальної інформації на основі апріорної інформації для посилення каналу для першої ітерації і на основі оновленої інформації для посилення каналу для подальшої ітерації. 40. Пристрій обробки інформації для отримання оновленої інформації для посилення каналу і перешкоди в системі безпровідного зв'язку, який містить засіб для отримання апріорної інформації для посилення каналу; засіб для отримання оцінки перешкоди; засіб для виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних, апріорної інформації для посилення каналу і оцінки перешкоди; засіб для декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних; засіб для виведення апостеріорної інформації для посилення каналу для кожного з прийнятих символів даних на основі оцінки перешкоди і інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних; і засіб для об'єднання апостеріорної інформації для посилення каналу для прийнятих символів даних і апріорної інформації для посилення каналу для отримання оновленої інформації для посилення каналу для кожного з прийнятих символів даних. 41. Пристрій за п. 40, який додатково містить засіб для повторення виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому випереджувальна інформація виводиться на основі апріорної інформації для посилення каналу для першої ітерації і на основі оновленої інформації для посилення каналу для кожної подальшої ітерації. 42. Спосіб виконання оцінювання фази каналу в системі безпровідного зв'язку, який включає виконання неітераційного оцінювання фази каналу на основі прийнятих символів для отримання набору гіпотез для фази каналу, причому набір гіпотез є піднабором всіх можливих гіпотез для фази каналу; і виконання ітераційного, направленого на дані оцінювання фази каналу на основі набору гіпотез і прийнятих символів даних для отримання остаточної оцінки фази каналу, вибраній з набору гіпотез. 43. Спосіб за п. 42, в якому набір М гіпотез включає в себе М фаз, рознесених на 2 π/М, для схеми модуляції на основі М-кової фазової маніпуляції (PSK), що використовується для прийнятих символів даних. 9 84740 10 44. Спосіб за п. 42, який додатково містить виконання ітераційного детектування і декодування для прийнятих символів даних з використанням набору гіпотез для фази каналу. 45. Спосіб відновлення даних в системі безпровідного зв'язку, який включає отримання оцінки фази каналу на основі прийнятих символів; отримання апріорної інформації для посилення каналу на основі прийнятих символів пілот-сигналу і оцінки фази каналу; виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу; декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних; виведення апостеріорної інформації для посилення каналу для кожного з прийнятих символів даних на основі оцінки фази каналу і інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних; і об'єднання апостеріорної інформації для посилення каналу для прийнятих символів даних і апріорної інформації для посилення каналу для отримання оновленої інформації для посилення каналу для кожного з прийнятих символів даних, 46. Спосіб за п. 45, в якому оцінка фази каналу представлена набором М гіпотез для фази каналу, де М більше ніж 1. 47. Спосіб за п. 45, який додатково включає повторення виведення випереджувальної інформації, декодування випереджувальної інформації, виведення апостеріорної інформації і об'єднання апостеріорної інформації і апріорної інформації для множини ітерацій, при цьому випереджувальна інформація виводиться на основі апріорної інформації для посилення каналу для першої ітерації і на основі оновленої інформації для посилення каналу для кожної подальшої ітерації. 48. Спосіб за п. 45, в якому прийняті символи даних виводяться зі схеми модуляції на основі Мкової фазової маніпуляції (PSK), де М>2. 49. Спосіб за п. 48, в якому апріорна інформація, апостеріорна інформація і оновлена інформація містять по М компонентів кожна для М різних значень фази каналу. 50. Спосіб за п. 45, в якому отримання оцінки фази каналу включає в себе визначення фази кожного з прийнятих символів даних; поворот фази кожного з прийнятих символів даних, якщо необхідно, для забезпечення знаходження в діапазоні значень, і обчислення оцінки фази каналу на основі повернених фаз для прийнятих символів даних. 51. Спосіб за п. 45, в якому отримання оцінки фази каналу включає в себе поворот кожного з прийнятих символів даних, якщо необхідно, для забезпечення знаходження фази поверненого прийнятого символу даних в діапазоні значень; обчислення усередненого прийнятого символу даних на основі повернених прийнятих символів даних, і обчислення оцінки фази каналу на основі усереднених прийнятих символів даних. 52. Приймач в системі безпровідного зв'язку, який містить блок оцінювання, призначений для отримання оцінки фази каналу на основі прийнятих символів даних і для отримання апріорної інформації для посилення каналу на основі прийнятих символів пілот-сигналу і оцінки фази каналу; детектор, призначений для виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу і декодер, призначений для декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних, і при цьому блок оцінювання додатково призначений для виведення апостеріорної інформації для посилення каналу на основі оцінки фази каналу і інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних, і для об'єднання апостеріорної інформації для посилення каналу і апріорної інформації для посилення каналу для отримання оновленої інформації для посилення каналу. 53. Пристрій обробки інформації для отримання оновленої інформації для посилення каналу і перешкоди в системі безпровідного зв'язку, який містить засіб для отримання оцінки фази каналу на основі прийнятих символів даних; засіб для отримання апріорної інформації для посилення каналу на основі прийнятих символів пілот-сигналу і оцінки фази каналу; засіб для виведення випереджувальної інформації для кодових бітів, відповідних прийнятим символам даних, на основі прийнятих символів даних і апріорної інформації для посилення каналу; засіб для декодування випереджувальної інформації для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних, і засіб для виведення апостеріорної інформації для посилення каналу на основі оцінки фази каналу і інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних, і засіб для об'єднання апостеріорної інформації для посилення каналу і апріорної інформації для посилення каналу для отримання оновленої інформації для посилення каналу. Винахід відноситься до галузі зв'язку і, більш конкретно, до методів відновлення даних в прису тності шумів і перешкод в приймачі в системі безпровідного зв'язку. 11 84740 У системі безпровідного зв'язку передавач в типовому випадку кодує, виконує перемежовування і модулює (відображає на символи) дані трафіка для отримання символів даних, які є символами модуляції для даних. У когерентній системі передавач мультиплексує символи пілот-сигналу з символами даних, обробляє мультиплексовані символи пілот-сигналу і даних для генерації модульованого сигналу і передає сигнал по без провідному каналу. Канал спотворює сигнал, який передається, за рахунок відгуку каналу і додатково знижує якість сигналу шумами і перешкодами. Приймач приймає переданий сигнал і обробляє прийнятий сигнал для отримання прийнятих символів. У когерентний системі приймач в типовому випадку оцінює відгук каналу за допомогою прийнятих символів пілот-сигналу і виконує когерентну демодуляцію/детектування прийнятих символів даних з використанням оцінок відгуку каналу для отримання відновлених символів даних, які є оцінками символів даних, переданих передавачем. Приймач потім виконує обернене відображення символів, обернене перемежовування і декодує відновлені символи даних для отримання декодованих даних, які є оцінкою даних трафіка, переданих передавачем. У типовій когерентний безпровідній системі приймач обробляє прийняті символи пілот-сигналу один раз для отримання оцінок відгуку каналу, а також виконує когерентну демодуляцію над прийнятими символами даних для отримання відновлених символів даних. Потім приймач виконує обернене відображення символів, обернене перемежовування і декодування над відновленими символами відповідно до схем кодування і модуляції, використаними для даних трафіка. Шуми і перешкоди погіршують якість відновлених символів даних і впливають на надійність декодованих даних. Тому в те хніці існує потреба в методах відновлення даних в присутності шумів і перешкод в приймачі в системі безпровідного зв'язку. Запропоновані ітеративні способи обробки в приймачі які враховують перешкоди і забезпечують поліпшені робочі показники. Ці способи можуть бути використані в різних системах безпровідного зв'язку і можуть бути реалізовані різним чином. Відповідно до схеми ітеративного оцінювання каналу і перешкод і декодування виконується ітеративне оцінювання посилення каналу і перешкоди. Згідно з цією схемою, спочатку отримують апріорну інформацію про посилення каналу і перешкоду (наприклад, на основі прийнятих символів пілот-сигналу). Випереджувальна інформація для кодових бітів, відповідних прийнятим символам даних, виводиться на основі прийнятих символів даних і апріорної інформації. (Кожний символ даних отримують на основі В кодових бітів, де В залежить від схеми модуляції, що використовується для символу даних). Ця випереджувальна інформація потім декодується для отримання інформації зворотного зв'язку для кодових бітів, відповідних прийнятим символам даних. На основі інформації зворотного зв'язку для кодових бітів, відповідних прийнятому символу даних, отриму 12 ють апостеріорну інформацію для посилення каналу і перешкод для кожного прийнятого символу даних. Ця апостеріорна інформація для всіх прийнятих символів даних і апріорна інформація об'єднуються для отримання оновленої інформації для посилення каналу і перешкоди для кожного прийнятого символу даних. Процес може повторюватися для деякого числа ітерацій, при цьому оновлена інформація для посилення каналу і перешкоди використовується для отримання випереджувальної інформації для кожної подальшої ітерації. Апріорна інформація, апостеріорна інформація і оновлена інформація для посилення каналу і перешкоди можуть бути представлені спільними розподілами ймовірностей для посилення каналу і перешкоди. Випереджувальна інформація і інформація зворотного зв'язку можуть бути представлені логарифмічними відношеннями правдоподібності (LLR) для кодових бітів прийнятих символів даних. У іншій схемі ітеративної обробки в приймачі перешкода оцінюється однократно і використовується в ітераційному процесі оцінювання каналу і декодування. Це може знизити обчислювальну складність для різних етапів ітераційного процесу. Для всіх схем ітераційної обробки в приймачі складність обробки може бути знижена за рахунок оцінювання амплітуд для каналу неітераційним способом (наприклад, на основі прийнятих символів пілот-сигналу і символів даних) і оцінювання тільки фази каналу ітераційним способом. Для додаткового зниження складності при використанні М-кової фазової маніпуляції (M-PSK), фаза каналу може оцінюватися в діапазоні від 0 до 2 p/Μ (наприклад, на основі прийнятих символів даних). В цьому випадку апріорна інформація, апостеріорна інформація і оновлена інформація для посилення каналу можуть містити Μ компонентів для Μ різних значень фази каналу, де Μ може бути набагато меншим, ніж число компонентів, необхідних при відсутності первинної оцінки фази каналу. Різні аспекти і варіанти здійснення винаходу описані більш детально нижче. Ознаки і суть даного винаходу пояснюються в подальшому детальному описі, що ілюструється кресленнями, на яких однаковими посилальними позиціями на кресленнях позначені відповідні елементи, де показане наступне: фіг. 1 - схема передачі для системи зі стрибкоподібною зміною частоти; фіг. 2 - передавач в системі зі стрибкоподібною зміною частоти; фіг. 3 - приймач зі стрибкоподібною зміною частоти; фіг. 4 - граф Таннера, що ілюструє ітераційне оцінювання каналу і перешкоди і декодування; фіг. 5 - процес виконання ітераційного оцінювання каналу і перешкод і декодування; фіг. 6 - процес виконання ітераційного оцінювання каналу і декодування з використанням оцінки перешкоди; фіг. 7 А і 7В - два способи оцінювання фази каналу на основі прийнятих символів даних і 13 84740 фіг. 8 - процес виконання ітераційного оцінювання каналу і декодування з використанням оцінки фази каналу, отриманої з прийнятих символів даних. Термін «зразковий» використовується в даному описі в значенні «служить як приклад, зразок, ілюстрація». Будь-який варіант здійснення, описаний нижче як «зразковий» не обов'язково повинен тлумачитися як переважний або переважний в порівнянні з іншими варіантами здійснення. Описані ітераційні способи обробки в приймачі можуть використовуватися для різних систем безпровідного зв'язку, які зазнають вплив перешкод. Для наочності ЦІ способи описані для системи зв'язку зі стрибкоподібною зміною частоти, в якій дані передаються на різних частотних піддіапазонах в різних часових інтервалах, які також називаються «періодами стрибкоподібної зміни». При стрибкоподібній зміні частоти, передача даних стрибком переходить з піддіапазону в піддіапазон псевдовипадковим чином. Ця стрибкоподібна зміна забезпечує частотне рознесення і забезпечує більш високу стійкість передачі даних по відношенню до спотворюючих ефектів на трасі поширення сигналу, таких як вузькосмугові взаємні перешкоди, придушення, завмирання і т. д. Піддіапазони в системі зі стрибкоподібною зміною частоти можуть бути забезпечені шляхом мультиплексування з ортогональним частотним розділенням (OFDM), за допомогою інших методів модуляції з множиною несучих або деяких інших методів. OFDM являє собою метод модуляції, який ефективно поділяє всю ширину смуги системи на множину (NF) ортогональних піддіапазонів. Кожний піддіапазон пов'язаний з відповідною піднесучою, яка може модулюватися даними. Піддіапазони також звичайно згадуються як тональні сигнали, піднесучі, елементи дозволу, частотні канали. Система зі стрибкоподібною зміною частоти може використовуватися у множині стільникових осередків, де стільниковий осередок звичайно відноситься до базової станції і/або її області покриття. Кожний стільниковий осередок може підтримувати одночасно велику кількість користувачів. Для заданого стільникового осередку, дані для кожного користувача в стільниковому осередку можуть передаватися з використанням конкретної послідовності стрибкоподібної зміни частоти (FH), виділеної користувачу. FH-послідовність вказує конкретний піддіапазон, який повинен використовуватися для передачі даних в кожному періоді стрибкоподібної зміни. Множина передач даних для множини користувачів може посилатися одночасно з використанням різних FH-послідовностей. Ці FH-послідовності визначаються як ортогональні один одному, так що тільки одна передача даних використовує кожний піддіапазон в кожному періоді стрибкоподібної зміни. При використанні ортогональних FH-послідовностей передачі даних для множини користувачів в одному і тому ж стільниковому осередку не створюють взаємних перешкод один одному при використанні в той же час переваг, що забезпечуються частотним рознесенням. Однак ці користувачі в типовому випадку зазнають взаємні перешкоди, що створюються між 14 стільниковими осередками, від користувачів в інших стільникових осередках. Взаємні перешкоди, що сприймаються даним користувачем, можуть змінюватися від стрибка до стрибка частоти, оскільки в різних періодах стрибкоподібної зміни може виявлятися вплив від різних створюючи х перешкоди користувачів. На фіг. 1 показана приведена для прикладу схема 100 передачі для системи зв'язку зі стрибкоподібною зміною частоти. На фіг. 1 показана передача пілот-сигналу даних в частотно-часовій площині де вертикальна вісь представляє частоту, а горизонтальна вісь представляє час. У цьому прикладі NF = 8, і вісім піддіапазонів позначені індексами від 1 до 8. Аж до восьми каналів трафіка може бути визначено, причому кожний канал трафіка використовує один з восьми піддіапазонів в кожному періоді стрибкоподібної зміни. Період стрибкоподібної зміни являє собою інтервал часу, виділений на кожний піддіапазон, і може визначатися як рівний тривалості NH OFDM-символів, де NH > 1. Кожний канал трафіка пов'язаний з відмінною FH-послідовністю. FH-послідовності для всіх каналів трафіка можуть генеруватися з використанням FH-функції f (k, Τ), де k означає номер каналу трафіка і Τ означає системний час, який заданий в одиницях періодів стрибкоподібної зміни. NF різних FH-послідовностей можуть генеруватися з NF різними значеннями k для FH-функції f (k, T). FHпослідовність для кожного каналу трафіка вказує конкретний піддіапазон, який повинен використовуватися для цього каналу трафіка в кожному періоді стрибкоподібної зміни. Для наочності на фіг. 1 показані піддіапазони, що використовуються для одного каналу трафіка. Цей канал трафіка стрибкоподібно переходить від одного піддіапазону до іншого піддіапазону псевдовипадковим чином, як визначено його FH-послідовністю. У разі схеми 100 передачі NP символів пілотсигналу (позначені затемненими прямокутниками) передаються як мультиплексовані з часовим розділенням (TDM) разом з ND символами даних (позначені заштрихованими прямокутниками) в кожному періоді стрибкоподібної зміни. У загальному випадку, NP>1, ND³1 і NP+ND=ΝH×Νp в типовому випадку складає достатнє число символів пілотсигналу, щоб забезпечити можливість приймачу адекватно оцінити відгук каналу в кожному періоді стрибкоподібної зміни. На фіг. 2 показана блок-схема передавача 200 в системі зі стрибкоподібною зміною частоти. Процесор 220 даних, які передаються, (ТХ) приймає дані трафіка від джерела 210 даних і дані керування від контролера 250. У процесорі 220 ТХданих кодер 222 кодує дані трафіка і дані керування відповідно до вибраної схеми кодування (наприклад, з використанням згорткового коду, коду контролю парності низької щільності (LDPC), турбокоду, блокового коду і т. д.) для отримання кодованих даних. Кодування підвищує надійність передачі даних. Канальний перемежовувач 224 перемежовує (тобто переупорядковує) кодовані дані для отримання перемежованих даних. Перемежовування забезпечує рознесення для кодова 15 84740 них даних. Блок 226 символьного відображення потім відображає на символи (тобто модулює) перемежовані дані відповідно до вибраної схеми модуляції для отримання символів даних. Вибрана схема модуляції може являти собою M-PSK (Мпозиційна фазова маніпуляція) (наприклад, BPSK (двопозиційна фазова маніпуляція) або QPSK (четвірчаста фазова маніпуляція)), M-QAM (М-кова квадратурна амплітудна модуляція) або деяку іншу схему модуляції. Символьне відображення може виконуватися шляхом (1) групування наборів з В перемежованих символів для формування Вбітових двійкових значень, де В > 1 і 2В = М, і (2) відображення кожного В-бітового двійкового значення на точку в сигнальній сукупності відповідній вибраній схемі модуляції. Кожна відображена сигнальна точка являє собою комплексне значення і відповідає символу модуляції (тобто символу даних). Блок 226 символьного відображення видає потік символів даних на OFD M-модулятор 230. OFDM-модулятор 230 виконує модуляцію стрибкоподібної зміни частоти і OFDM для символів даних і пілот-сигналу. У OFDM-модуляторі 230, TX-FH-процесор 232 приймає символи даних і пілот-сигналу і забезпечує ці символи в належному піддіапазоні (і в належному порядку) в кожному періоді стрибкоподібної зміни, як вказано FHпослідовнстю з контролера 250. Символи даних і пілот-сигналів динамічно стрибкоподібно переходять з піддіапазону в піддіапазон псевдовипадковим чином, як визначено FH-послідовністю. TX-FHпроцесор 232 забезпечує NF символів передачі для NF піддіапазонів для кожного періоду OFDMсимволу. Ці NF символів передачі складаються з одного символу даних/пілот-сигналу для кожного піддіапазону, що використовується для передачі даних/пілот-сигналу, і н ульового значення сигналу для кожного піддіапазону, що не використовується для передачі даних/пілот-сигналу. Блок 234 зворотного швидкого перетворення Фур'є (ЗШПФ) отримує NF символів передачі для кожного періоду OFD M-символу, виконує NFточкове зворотне швидке перетворення Фур'є для NF символів передачі і забезпечує відповідний перетворений символ, який містить NF кодових елементів у часовій області Кожний кодовий елемент являє собою комплексне значення, яке повинне передаватися в одному періоді кодового елемента, де частота проходження кодових елементів в типовому випадку визначається шириною смуги системи. Генератор 236 циклічного префікса приймає NF кодових елементів для кожного перетвореного символу і повторює частину перетвореного символу для формування OFDM-символу, який містить NF + Ncp кодових елементів, де Νcp - число повторюваних кодових елементів. Повторювана частина часто згадується як циклічний префікс і використовується для протидії міжсимвольним перешкодам (ISI), зумовленим дисперсією безпровідного каналу (тобто безпровідного каналу з розкидом часових затримок). Період OFDM-символу являє собою тривалість одного OFDM-символу, який складається з періодів NF+Ncp кодових елементів. Генератор 236 циклічного префікса забезпечує потік OFDM-символів. Передавальний блок 16 (TMTR) 242 здійснює перетворення потоку (тобто перетворює в аналогові сигнали, фільтрує, посилює і перетворює з підвищенням частоти) OFDMсимволів для генерації модульованого сигналу, який передається від антени 244. На фіг. 3 показана блок-схема приймача 300 в системі зі стрибкоподібною зміною частоти. Антена 312 приймає модульований сигнал, переданий передавачем 200, і подає прийнятий сигнал в приймальний блок (RCVR) 314. Приймальний блок 314 здійснює перетворення (перетворює з пониженням частоти фільтрує і посилює) прийнятий сигнал і потім оцифровує перетворений сигнал для отримання потоку вибірок, які подаються на OFDM-демодулятор 230. У OFDM-демодуляторі 230, блок 322 видалення циклічного префікса приймає потік символів, видаляє циклічний префікс, приєднаний до кожного прийнятого OFDM-символу, і забезпечує відповідний прийнятий перетворений символ, який містить NF вибірок. Блок ШПФ 324 виконує NF-точкове швидке перетворення Фур'є над NF вибірками для кожного прийнятого перетвореного символу для отримання NF прийнятих символів для NF піддіапазонів для даного перетвореного символу. RX FHпроцесор/демультиплексор 326 отримує NF прийнятих символів для кожного періоду OFDM-символу і забезпечує прийнятий символ з належного піддіапазону як прийнятий символ даних/пілот-сигналу для даного періоду OFDM-символу. Належний піддіапазон визначається FH-послідовністю з контролера 350. FH-послідовність, яка використовується для RX FH-процесора 326 в приймачі 300, є тією ж, що і FH-послідовність, яка використовується в ТХ FH-процесорі 232 в передавачі 200, і синхронізована з нею. RX FH-процесор 326 працює узгоджено з ТХ FH-процесором 232 і видає потік прийнятих символів даних/пілот-сигналу з належних піддіапазонів в процесор 330 прийнятих (RX) даних. Процесор 330 RX даних виконує ітераційну обробку приймача над прийнятими символів даних і пілот-сигналів для отримання декодованих даних. Для варіанту здійснення, показаного на фіг. 3, процесор 330 RX даних включає в себе блок 332 оцінювання каналу і перешкод, детектор 334, канальний обернений перемежовувач 336, декодер 340 і канальний перемежовувач 342, які працюють, як описано нижче. Процесор 330 RX даних видає декодовані дані в приймач 348 даних і/або контролер 350. Контролери 250 і 350 керують роботою передавача 200 і приймача 300, відповідно, блоки 252 і 352 пам'яті забезпечують зберігання програмних кодів і даних, що використовуються контролерами 250 і 350, відповідно. Модель для системи зі стрибкоподібною зміною частоти може бути виражена таким чином: rk (m ) = sk × hk ( m) + nk ( m), = sk ( m) × ak ( m)e j qk ( m ) + nk (m), Рівняння (1) де s k(m) - символ даних або пілот-сигналу, що передається в піддіапазоні k в періоді m символу; hk (m) - комплексне посилення каналу для піддіапазону k в періоді m символу, яке може бути 17 84740 розкладене на амплітуду ak(m) каналу і фазу qк (m) каналу; rk (m) - прийнятий символ даних або пілотсигналу в піддіапазоні k в періоді m символу; і nk (m) - шум і перешкода, прийняті в піддіапазоні k в періоді m символу. Для простоти передбачається, що амплітуда каналу ak(m)=|hk (m)| відома в приймачі і що необхідно оцінювати тільки фазу qk (m) каналу. Для схеми модуляції зі сталою енергією, такою як MPSK, амплітуда символів даних і пілот-сигналу, прийнятих в кожному періоді стрибкоподібної зміни, може бути усереднена для отримання прийнятно точної оцінки амплітуди ak(m) каналу для даного періоду стрибкоподібної зміни. Таким чином, в подальшому описі посилення каналу може бути в достатній мірі охарактеризовано тільки фазою каналу. (Однак діаграми показують більш точний випадок, коли посилення каналу може бути комплексною величиною з невідомою амплітудою і фазою.) Приймач може використовувати неітераційну або ітераційну обробку приймача для відновлення переданих даних. Для неітераційної схеми, відгук каналу оцінюється на основі прийнятих символів пілот-сигналу, і прийняті символи rk(m) пілотсигналу когерентно демодулюються або детектуються з використанням оцінки відгук у каналу, щоб отримати відновлені символи s k(m), які є оцінками переданих символів s k(m) даних. Детектування виконується однократно для неітераційної схеми. Відновлені символи даних потім обернено перемежовуються і декодуються для отримання декодованих даних. Для ітераційної схеми, оцінювання каналу, детектування і декодування виконуються для множини ітерацій. Ітераційна схема використовує виправляючу здатність схеми кодування для забезпечення поліпшених робочих показників. Це досягається ітераційним проходженням інформації через блок оцінки каналу, детектор і декодер для множини ітерацій, як описано нижче. На фіг. 4 показує граф Таннера 400, який графічно ілюструє ітераційну схему оцінювання каналу і перешкоди і декодування. Ітераційна обробка приймача виконується над блоком символів даних, який, в загальному випадку, може містити будь-яку кількість символів даних. Для ясності ітераційна обробка приймача описана нижче для блока з ND прийнятих символів даних для одного періоду стрибкоподібної зміни. ND прийнятих символів даних утворені Νβ кодовими бітами, де NB=B×ND. Граф Таннера 400 включає в себе вузол 410 оцінювання каналу і перешкоди, ND вузлів детектування, від 420а до 420n, для ND символів даних в блоці канальний обернений перемежовувач 336, канальний перемежовувач 342, декодер 340 і ND вузлів оцінювання, від 440а до 440п, для ND символів даних. Вузол 410 пов'язаний з кожним вузлом 420 детектування через відповідний зв'язок 412 і з кожним вузлом 440 через відповідний зв'язок 442. Кожен із зв'язків 412 і 442 переносить інформацію про посилення каналу і перешкоду для символу даних, асоційованого з даним зв'язком. Кожний вузол 420 детектування пов'язаний з канальним оберненим перемежовувачем 336 через В 18 зв'язків 422, і кожний вузол 440 оцінювання пов'язаний з канальним перемежовувачем 342 через В зв'язків 436. Декодер 340 пов'язаний з канальним оберненим перемежовувачем 336 через NB зв'язків 426, і з канальним перемежовувачем 342 через NB зв'язків 432. Кожна із зв'язків 422, 426, 432 і 436 переносить інформацію (в напрямку, вказаному зв'язком) для кодового біта, асоційованого з цим зв'язком. Інформація для кожного кодового біта в типовому випадку має форму логарифмічного відношення правдоподібності (LLR), яке вказує імовірність кодового біта рівного «1» або «0». Для першої ітерації вузол 410 дістає оцінки посилення каналу на основі прийнятих символів пілот-сигналу. Вузол 410 оцінює тільки фазу каналу, якщо амплітуда каналу відома. Вузол 410 також оцінює перешкоду, що сприймається прийнятими символами даних, на основі прийнятих символів пілот-сигналу. Вузол 410 забезпечує апріорну інформацію для фази каналу і перешкоди для кожного вузла 420 детектування через зв'язок 412. Кожний вузол 420 детектування отримує відповідний прийнятий символ rk (n) даних і апріорну інформацію про фазу каналу і перешкоду від вузла 410. Кожний вузол 420 детектування обчислює LLR для кожного з В кодових бітів, які утворюють символ даних, на основі прийнятого символу r k (n) даних і апріорної інформації про фазу каналу і перешкоду. Кожний вузол 420 детектування видає В «випереджувальних» значень LLR для В кодових бітів на канальний обернений перемежовувач 336 через зв'язки 422. Канальний обернений перемежовувач 336 виконує обернене перемежовування випереджувальних значень LLR для всіх ΝΒ кодових бітів способом, комплементарним перемежовуванню, виконаному в передавачі і видає обернено перемежовані випереджувальні значення LLR на декодер 340. Декодер 340 декодує обернено перемежовані випереджувальні значення LLR для NB кодових бітів відповідно до схеми кодування, використаної передавачем. Наприклад, декодер 340 може реалізувати (1) алгоритм максимуму апостеріорної імовірності (МАР) або алгоритм м'якого рішення Вітербі (SOV), якщо передавач використовує згортковий код або (2) турбодекодер або декодер LDPC, якщо передавач використовує турбокод або код LDPC. Декодер 340 видає значення LLR зворотного зв'язку для NB кодових бітів, які є оновленими значеннями LLR для цих бітів, на канальний перемежовувач 342 за допомогою зв'язків 432. Канальний перемежовувач 342 перемежовує отримані значення LLR зворотного зв'язку тим же способом, що і перемежовування, яке виконується в передавачі і видає перемежовані значення LLR зворотного зв'язку на вузли 440 оцінювання за допомогою зв'язків 436. Кожний вузол 440 оцінювання отримує відповідні прийняті символи rk (n) даних і перемежовані значення LLR зворотного зв'язку для В кодових бітів даного прийнятого символу даних від канального перемежовувача 342. Кожний вузол 440 оцінювання виводить апостеріорну інформацію для фази каналу і перешкоди для свого символу даних 19 84740 на основі прийнятого символу rk (n) даних і значень LLR зворотного зв'язку і видає цю апостеріорну інформацію на вузол 410 за допомогою зв'язку 442. Вузол 410 об'єднує апріорну інформацію для посилення каналу і перешкоди і апостеріорну інформацію для фази каналу і перешкоди від вузлів 440 оцінювання для отримання оновленої інформації для посилення каналу і перешкоди для кож ного прийнятого символу даних. Вузол 410 видає оновлену інформацію для фази каналу і перешкоди на кожний вузол 420 детектування. Детектування і декодування для другої ітерації потім виконуються аналогічним методом, як і для першої ітерації, але тільки з оновленою інформацією для посилення каналу і перешкоди. Згідно з фіг. 4, кожний вузол 420 детектування виводить і видає випереджувальну інформацію для кодових бітів, відповідних конкретному прийнятому символу даних, і декодер 340 виводить і видає інформацію зворотного зв'язку для кожного прийнятого символу даних. Випереджувальна інформація і інформація зворотного зв'язку в типовому випадку задаються в формі LLR, але можуть задаватися і в іншій формі. На фіг. 5 показана блок-схема процесу 500 для виконання ітераційоного оцінювання каналу і перешкоди і декодування. На етапі 510 апріорна інформація для фази каналу і перешкоди виходить на основі прийнятих символів пілот-сигналу. Етап 510 виконується вузлом 410 на фіг. 4. Знову передбачається, що амплітуда каналу відома, і оцінюється тільки фаза каналу. Нормований стан каналу для символів пілот-сигналу може бути виражений таким чином: h=a×ejq+n, Рівняння (2) де посилення а каналу і фаза θ каналу передбачаються сталими для всіх ND символів даних в блоці і шум і перешкода n передбачаються комплексною гауссівською випадковою змінною з нульовим середнім і дисперсією N0. Апріорна інформація для фази каналу і перешкоди може бути задана як спільний розподіл імовірності фази θ каналу і потужності І перешкоди. Для простоти, фаза θ каналу може бути квантована по L можливих значеннях і задана як ціле кратне величини 2p/L. Аналогічним чином, потужність І перешкоди може бути квантована на Q можливих значень. Спільний розподіл імовірності θ і І може бути представлений як тривимірний (3-D) граф, на якому вісь χ представляє фазу θ каналу, вісь у представляє потужність І перешкоди, і вісь z представляє спільну імовірність конкретної фази θ 0 каналу і конкретної потужності І0 перешкоди для конкретного прийнятого символу пілот-сигналу. Спільний розподіл імовірності θ і І може бути представлений таким чином: Рівняння (3) ~ Pr( q = q0 ,I = I0 p ) = Pr( q = q 0 , I = I0 ) × Pr( ~ q = q0 ,I = I0 ) p Pr( ~) p ~ µ Pr( I = I 0 ) Pr( p q = q 0 , I = I0 ) æ p - p × a × ej q0 ~ ç = Pr( I = I 0 ) × exp ç I0 pI 0 ç è 1 2 ö ÷ ÷ ÷ ø 20 де ~ - прийнятий символ пілот-сигналу і p p дійсний символ пілот-сигналу; ~ Pr( q = q0 , I = I0 p ) - спільний розподіл імо вірності θ і І, який дає імовірність фази каналу, що дорівнює q0, і потужності перешкоди, яка дорівнює Іо, за умови прийнятого символу пілот-сигналу Pr( q = q0 , I = I0 ) ~; p - апріорний спільний роз поділ імовірності q і І, яке дає імовірність фази каналу, яка дорівнює q0, і потужності перешкоди, яка дорівнює Іо; Pr( ~ q = q0 , I = I0 ) p - розподіл імовірності (отриманий на основі моделі каналу зв'язку, наприклад гаусавської), який дає імовірність отримання прийнятого символу пілот-сигналу ρ для заданої фази каналу, яка дорівнює q0 і потужності перешкоди, що дорівнює Іо; Рr( ~ 0) - імовірність отримання заданого знаp чення ~ ; p Рr(І=І0) - апріорний розподіл імовірності по І, який дає імовірність потужності перешкоди, яка дорівнює І0. Перший вираз в рівнянні (3) отриманий на основі правила Байеса. Другий вираз в рівнянні (3) отриманий в припущенні що різні значення фази q каналу є апріорно рівноймовірними, так що Ρr(q=q0) є сталою величиною і може бути опущена. Третій вираз в рівнянні (3) отриманий на основі припущення, що шум і перешкода є комплексною гаусавської змінною з нульовим середнім і дисперсією І0. У рівнянні (3) опущений нормуючий коефіцієнт, який може бути обчислений шляхом застосування обмеження, що функція розподілу імовірності (pdf) інтегрується до одиниці по своїй області Один спільний розподіл імовірності по q і І, виходить для кожного прийнятого символу пілотсигналу, як показано в рівнянні (3). Якщо є велика кількість прийнятих символів пілот-сигналів, то спільний розподіл імовірності по q і І, виходить для цих символів і об'єднується для отримання повного або складового спільного розподілу імовірності по θ і І для всіх прийнятих символів пілот-сигналів. Етап 510 забезпечує отримання одного спільного розподілу імовірності по θ і І для використання всіма ND прийнятими символами даних. Цей спільний розподіл імовірності мстить L×Q значень імовірності для L різних значень фаз каналу і Q різних значень потужності перешкоди, що може розглядатися як тривимірне графічне представлення імовірності в залежності від θ і І. Цей спільний розподіл імовірності представляє апріорну інформацію для фази каналу і перешкоди, отриману на основі прийнятих символів пілот-сигналу. Імовірності для спільного розподілу ~ Pr( q q0 , I I0 p ) = = можуть бути виражені в ло гарифмічній області для спрощення подальшого обчислення. Це подібне до використання логарифму відношення правдоподібності (LLR) для ви 21 84740 раження розподілу імовірності одного кодового біта. Використання представлення в логарифмічній області дозволяє уникнути необхідності обчислення зовнішнього експонента в третьому виразі рівняння (3). Спільний розподіл імовірності по θ і І виходить на основі двох змінних θ і І, які апріорно незалежні Спільний розподіл, є, таким чином, добутком розподілу по θ і розподілу по І. Розподіл по θ може передбачатися рівномірним. Розподіл по І (тобто розподіл потужності перешкоди) може бути отриманий різними способами. У одному варіанті здійснення потужність перешкоди передбачається сталою по Q значеннях. У іншому варіанті здійснення потужність перешкоди передбачається такою, що має стандартний розподіл, такий як гауссівський розподіл або логарифмічно-нормальний розподіл. Ще в одному варіанті здійснення розподіл потужності перешкоди виводиться на основі комп'ютерного моделювання на мережевому рівні емпіричних вимірювань або іншими засобами. На етапі 520 випереджувальні LLR для В кодових бітів кожного прийнятого символу даних обчислюються на основі прийнятого символу даних і спільного розподілу імовірності по θ і І для цього символу. Етап 520 виконується кожним вузлом 420 детектування, показаним на фіг. 4. Обчислення випереджувального LLR для кожного вузла 420 детектування може виконуватися на двох етапах. На першому етапі апостеріорний розподіл по значенню переданого символу даних x обчислюється на основі прийнятого символу даних r і спільного розподілу імовірності по θ і І. Символ даних може приймати одне з Μ=2В можливих значень. Цей апостеріорний розподіл вказує імовірність для кожного з Μ можливих значень x за умови прийнятого символу даних r і спільного розподілу імовірності по θ і І. Апостеріорний розподіл по x за умови r може бути виражений таким чином: Pr( x = x 0 r ) µ Pr( r x = x 0 ), L =å i =1 Рівняння (4) Q å Pr(q = qi ,I = Ij ) ×Pr( r x = x 0 , q = qi ,I = I j ), j =1 де x - значення символу даних, яке може мати Μ можливих значень; Pr( x = x 0 r ) - апостеріорний розподіл по х за умови r, яка дає імовірність значення символу даних, яка дорівнює x0, за умови прийнятого символу r; Pr( r x = x 0 ) - розподіл, який дає імовірність отримання прийнятого символу даних r, за умови значення символу даних, що дорівнює x0; Pr( q = q i, I = I j ) - спільний розподіл θ і І, отриманий з оцінювання каналу і перешкоди; Pr( r x = x0 , q = qi , I = I j ) - комплексний га уссівський розподіл із середнім х0аеjqi і дисперсією Іj. Апостеріорний розподіл по x за умови r, тобто Pr( x = x 0 r ) , може розглядатися як двовимірний графік, який містить Μ значень імовірності для Μ 22 значень х, відповідних прийнятому символу даних r. На другому етапі для обчислення випереджувальних LLR апостеріорний розподіл по x для прийнятого символу даних «береться в межах» для отримання випереджувальних LLR для В кодових бітів цього символу. Значення x символу даних визначається значеннями В кодових бітів і сигнальною сукупністю, що використовується для відображення кодових бітів на символи даних. Кожне з Μ можливих значень відповідає відмінній комбінації значень для В кодових бітів. Випереджувальне LLR для кожного кодового біта може бути обчислене як зважена сума Μ значень імовірності для Μ можливих значень х, де зважування визначається відстанню між символом даних в сигнальній сукупності (або символом сукупності) і прийнятим символом даних. Етап 520 забезпечує В випереджувальних LLR для В кодових бітів кожного прийнятого символу даних, або всього Ν Β випереджувальних LLR для Ν Β кодових бітів ND символів даних, що обробляються ітераційним методом. Випереджувальні LLR представляють випереджувальну інформацію, що видається в декодер. На етапі 530 випереджувальні LLR для кодового слова, яке містить NB кодових бітів, декодуються для отримання LLR зворотного зв'язку для NB кодових бітів. Етап 530 виконується в декодері 340, показаному на фіг. 4. Декодування може виконуватися, наприклад, на основі алгоритмів MAP, SOV або алгоритму турбодекодування, і може виконуватися для однієї або більше ітерацій. На етапі 530 забезпечується NB LLR зворотного зв'язку для NB кодових бітів, які представляють інформацію зворотного зв'язку, що забезпечується декодером. На етапі 540 апостеріорний спільний розподіл імовірності по θ і І обчислюється для кожного прийнятого символу даних на основі LLR зворотного зв'язку для В кодових бітів цього символу даних таким чином: Pr( q = q0 ,I = I0 r ) µ Pr(I = I0 ) × Pr(r q = q 0,I = I0 ), Рівняння (5) M = Pr(I = I0 ) × å Pr( x = xi ) × Pr( r x = xi ,q = q0 ,I = I0 ) i= 1 де Pr( q = q 0 ,I = I0 r ) - апостеріорний спіль ний розподіл імовірності по θ і І, який забезпечує імовірність фази каналу, яка дорівнює θ0, і потужності перешкоди, яка дорівнює І0, за умови прийнятого символу даних r; Рr(х=хi) - вироблення розподілів по символу даних х, яке може бути отримане на основі LLR зворотного зв'язку для В кодових бітів прийнятого символу даних r; і Pr( r x = x i , q = q 0 ,I = I0 ) - комплексний га уссівський випадковий розподіл із середнім і xi×a×ejq0 дисперсією Іо. Етап 540 виконується кожним вузлом 440 оцінювання, показаним на фіг. 4. Апостеріорний спільний розподіл імовірності по θ і І за умови r подібний до апріорному спільному розподілу імовірності по θ і І за умови, обчисленій на етапі 510. Однак апостеріорний спільний розподіл імовірності обчислюється на основі LLR зворотного 23 84740 зв'язку, в той час як апріорний спільний розподіл імовірності обчислюється на основі прийнятого пілот-сигналу. Етап 540 забезпечує ND спільних розподілів імовірності по θ і І для ND прийнятих символів даних. На етапі 550 різні спільні розподіли ймовірностей по θ і І комбінуються для отримання об'єднаних спільних розподілів ймовірностей по θ і І для ND прийнятих символів даних. Етап 550 виконується вузлом 410, показаним на фіг. 4. Для етапу 550, ND апостеріорних спільних розподілів ймовірностей по θ і І для ND прийнятих символів даних забезпечуються з етапу 540, а один апріорний спільний розподіл імовірності по θ і І забезпечується з етапу 510. Ці ND + 1 розподілів по θ і І використовуються для отримання ND оновлених розподілів по θ і І для ND прийнятих символів даних. Для запобігання позитивному зворотному зв'язку, тільки зовнішня інформація використовується для отримання оновленого розподілу по θ і І для кожного вузла 420 детектування. Зовнішня інформація для символу даних виключає інформацію, що отримується на основі цього символу даних. Оновлений розподіл по θ і І для кожного прийнятого символу даних г виходить, таким чином, на основі (1) ND - 1 апостеріорних розподілів по θ і І, отриманих для інших ND - 1 прийнятих символів даних, і (2) апріорного розподілу по θ і І, отриманого з прийнятих символів пілот-сигналу. Це обчислення (1) ефективно замінює апостеріорний розподіл імовірності по θ і І, отриманий для прийнятого символу г даних рівномірним розподілом, і (2) передбачає, що ND - 1 апостеріорних розподілів по θ і І, отриманих для інших ND - 1 прийнятих символів даних, отримані на основі незалежних фрагментів інформації. Як приклад, передбачимо, що два розподіли по θ і І, а саме Pr( q = q0 , I = I0 a ) і Pr( q = q0 , I = I0 b) , повинні об'єднуватися, де α і β - незалежні випадкові змінні коли застосовується умова для θ і І. Складовий розподіл може бути виражений таким чином: Pr(q = q0 ,I = I0 a, b ) µ Pr(a, b q = q0, I = I0 ) = Pr(a q = q0 ,I = I0 ) × Pr(b q = q0 ,I = I0 ) µ Pr( q = q0 , I = I0 a ) × Pr(q = q0, I = I0 b ) Рівняння (6) Обчислення згідно з рівнянням (6) можна розширити таким чином, щоб можна було комбінувати будь-яке число розподілів по θ і І. Етап 550 забезпечує ND оновлених спільних розподілів імовірності по θ і І для ND прийнятих символів даних, які використовуються вузлом 420 детектування для оновлення випереджувальних LLR в наступній ітерації. Етап 550 завершує одну повну ітерацію спільного оцінювання каналу і перешкоди і декодування. На етапі 560 приймається рішення, завершувати чи ні ітераційне оцінювання каналу і перешкоди і декодування. Це рішення може прийматися на основі одного або більше критеріїв завершення. Наприклад, критерій завершення може бути таким простим, як попередньо визначене число ітерацій. Якщо відповіддю на етапі 560 є 24 «ні», то процес повертається до етапу 520 для оновлення випереджувальних LLR для кодових бітів. У іншому випадку процес завершується. Етап 560 може виконуватися після етапу 530, так що етапи 540 і 550 можуть бути опущені для останньої ітерації. Для простоти, обчислення розподілу імовірності в явному вигляді показане тільки для рівняння (1) і опущене для всіх інших рівнянь. Обчислення різних описаних розподілів ймовірностей відоме в техніці. Число значень, що приймаються фазою каналу і перешкодою, визначає обчислювальну складність різних етапів, поданих на фіг. 5. Оскільки кожний спільний розподіл імовірності по θ і І містить L×Q значень імовірності обчислювальна складність пропорційна як L, так і Q, які являють собою число квантованих значень для фази каналу і перешкоди, відповідно. Для підтримки прийнятної складності перешкода може бути квантована з низьким розрізненням з використанням малого числа значень. Метод зниження числа значень фази каналу описаний нижче. Складність також може бути знижена з використанням фази каналу і перешкоди іншими способами, як описано нижче. На фіг. 6 показана блок-схема процесу 600 для виконання ітераційного оцінювання каналу і декодування з оцінюванням перешкоди. Для процесу 600 перешкода оцінюється однократно і використовується в процесі ітераційного оцінювання каналу і декодування. Оцінка перешкоди оновлюється неітераційним чином, щоб знизити складність. Спочатку оцінка перешкоди і апріорна інформація для фази каналу виходять на основі прийнятих символів пілот-сигналу (етап 610). На етапі 610, спільний розподіл імовірності по θ і І виходить спочатку на основі прийнятих символів пілотсигналу, як описано вище для етапу 510. Потім спільний розподіл імовірності по θ і І в межах розділяється на розподіл імовірності по θ і розподіл імовірності по І. Значення І потім вибирається на основі розподілу по І і використовується як оцінка Iest перешкоди. Оцінка Iest перешкоди може бути найбільшим значенням в розподілі по І, значенням І, яке забезпечує мінімальну середньоквадратичну помилку для розподілу по І і т. д. Етап 610 забезпечує розподіл по θ і оцінку Iest перешкоди. Розподіл по q, тобто може бути виражений таким чином: ~ Pr( q = q0 p ) µ Pr( ~ q = q 0 ,I = Iest ) Рівняння (7) p Множина розподілів по θ можуть бути отримані для множини прийнятих символів пілот-сигналів і об'єднуються для отримання одного розподілу по θ для всіх прийнятих символів пілот-сигналів. Рівняння (7) представляє один спосіб отримання розподілу по θ. Як альтернатива, розподіл, що є результатом розділення, може також використовува тися безпосередньо для отримання розподілу по θ. Випереджувальні LLR для В кодових бітів кожного прийнятого символу даних потім обчислюються на основі прийнятих символів даних, апріорній інформації для фази каналу і оцінки перешкоди (етап 620). Етап 620 може виконувати 25 84740 ся на двох етапах, подібно до того, як це описано вище для етапу 520 на фіг. 5. На першому етапі апостеріорний розподіл по x за умови r, тобто Pr( x = x 0 r ) , обчислюється таким чином: Pr( x = x0 r ) µ Pr( r x = x0 ) L = å Pr( q = qi ) × Pr( r x = x0 , q = qi,I = Iest ) i =1 Рівняння (8). На другому етапі розподіл по χ для кожного прийнятого символу даних розділяється для отримання випереджувальних LLR для В кодових бітів прийнятого символу даних. Випереджувальні LLR для всіх ΝΒ кодових бітів потім декодуються для отримання LLR зворотного зв'язку для кодових бітів (етап 630). Апостеріорна інформація для фази каналу потім виходить для кожного прийнятого символу даних на основі LLR зворотного зв'язку для В кодових бітів даного символу і оцінки перешкоди (етап 640). Апостеріорний розподіл по θ для кожного прийнятого символу даних може бути виражений таким чином: Pr( q = q0 r ) µ Pr( r q = q0 ) M = å Pr( x = xi ) × Pr( r x = xi, q = q0,I = Iest ) i =1 Рівняння (9). Апостеріорна інформація для фази каналу для No прийнятих символів даних і апріорна інформація для фази каналу потім об'єднуються для отримання оновленої інформації для фази каналу для кожного прийнятого символу даних (етап 650). Зокрема, оновлений розподіл по θ обчислюється для кожного прийнятого символу даних на основі ND - 1 апостеріорних розподілів по θ для інших ND 1 прийнятих символів даних і апріорного розподілу, о триманого з прийнятих символів пілотсигналу. Потім визначається, чи потрібно завершити ітераційне оцінювання каналу і декодування (етап 660). Якщо відповіддю є «ні», то процес повертається до етапу 620 для оновлення випереджувальних LLR для В кодових бітів кожного прийнятого символу даних на основі прийнятого символу даних, оновленого розподілу по θ і оцінки Iest перешкоди, як показано в рівнянні (8). В іншому випадку процес завершується. Знову, етап 660 може бути виконаний після етапу 630. Ітераційне оцінювання каналу і декодування з використанням оцінки перешкоди також можуть виконуватися іншими методами, і це також входить в об'єм винаходу. Наприклад, ітераційна процедура може початися з обчислення спільного розподілу імовірності по θ і І для кожного прийнятого символу даних з LLR зворотного зв'язку для символу, встановленими в нуль. Прийнятий символ даних може забезпечувати інформацію для θ по модулю 2p/Μ, навіть якщо ніяка інформація не доступна про передані символи дані Ця інформація для θ по модулю 2p/Μ може потім дати в результаті нетривіальну інформацію про перешкоду. Спільний розподіл імовірності по θ і І для ND прийнятих символів даних потім об'єднується з апріо 26 рним спільним розподілом по θ і І, отриманим з прийнятих символів пілот-сигналу. Оновлений спільний розподіл імовірності по θ і І для кожного прийнятого символу даних потім розділяється для отримання розподілу по θ і розподілу по І. Значення І потім вибирається на основі розподілу по І і використовується як оцінка Iest перешкоди. Потім розподіл по θ для кожного прийнятого символу даних і оцінка Iest перешкоди потім використовуються для обчислення випереджувальних LLR для прийнятого символу даних, як описано вище. Як відмічено вище, одним чинником, який впливає на обчислювальну складність схеми, яка ітераційним методом оновлює інформацію про фазу каналу, є число значень, на яке квантована фаза θ каналу (тобто значення для L). Для модуляції M-PSK фаза θ каналу може оцінюватися до значення в межах діапазону від н уля до 2p/Μ з використанням неітераційної оцінки, основаної на даних. Описаний вище метод для отримання розподілу по θ для кожного прийнятого символу даних з LLR зворотного зв'язку, встановленими в нуль, є прикладом оцінювання на основі даних, що є неітераційним методом, оскільки вихідний результат коду не використовується для оцінки. Фаза каналу може тоді квантуватися на Μ різних значень (замість L значень), що істотно знижує обчислювальну складність, якщо Μ набагато менше, ніж L. Різні методи можуть використовуватися для оцінювання фази каналу на основі прийнятих символів даних. Два ілюстративних методи описані нижче. Фіг. 7А ілюстр ує оцінювання фази θ каналу на основі фаз прийнятих символів даних. У цьому прикладі використовується модуляція QPSK, і п'ять прийнятих символів даних представлені жирними точками 712а-712е в сигнальній сукупності 700 QPSK. Кожний прийнятий символ даних має фазу, яка визначається модуляцією символу даних, фазою θ каналу, шумом і перешкодою. У цьому методі спочатку визначається фаза кожного прийнятого сигналу. Потім для фази кожного прийнятого символу даних виконується операція по модулю 2p/Μ, щоб е фективно усун ути модуляцію символу даних і перетворити символ даних в символ пілот-сигналу. Фази по модулю 2p/Μ для п'яти прийнятих символів даних графічно представлені кружками 722а-722е в сигнальній сукупності 700 QPSK. Фази по модулю 2p/Μ для п'яти символів даних потім усереднюються для отримання оцінки фази 6est каналу, яка позначена міткою «х» 730. На фіг. 7В показано оцінювання фази каналу на основі комплексних значень прийнятих символів даних. Для цього методу також представлені п'ять прийнятих символів даних у вигляді жирних точок 712а-712е в сигнальній сукупності 700 QPSK. Кожний прийнятий символ даних повертається на ціле кратне значення 2p/Μ (тобто на 2p×i/Μ, де і - ціле число, яке дорівнює нулю або більше, ніж нуль), так що фаза поверненого прийнятого символу даних знаходиться в діапазоні від нуля до 2p/Μ. Прийнятий символ даних 712а повернутий на нуль градусів. Прийняті символи даних 712b-712е повернені на відповідні величини і представлені кружками 752b-752е, відповідно, в сигнальній сукупності 750. П'ять повернених при 27 84740 йнятих символів даних усереднюються для отримання усередненого прийнятого символу даних, який представлений міткою «х» 760. Фаза θ каналу оцінюється як фаза усередненого прийнятого символу даних. Цей метод використовує як амплітуду, так і фазу прийнятих символів даних для обчислення оцінки фази qest каналу, в той час як метод, що ілюстр ується на фіг. 7 А, використовує тільки фазу прийнятих символів даних. Фаза каналу може оцінюватися і іншими способами, що також входить в об'єм даного винаходу. Наприклад, фаза каналу може оцінюватися з використанням методів, описаних вище, для отримання розподілу по θ для кожного прийнятого символу даних з LLR зворотного зв'язку, встановленими на нуль. Як інший приклад, фаза кожного прийнятого символу даних може множитися на Μ і потім усереднюватися. Якщо фаза каналу по модулю 2p/Μ може оцінюватися надійним чином, то фаза каналу відома з точністю до діапазону від нуля до 2p/Μ. Єдина невизначеність полягає в тому, до якого з Μ можливих діапазонів належить фаза каналу. Ітераційна схема може потім оперувати з Μ різними значеннями фази каналу, тобто {qest, q est+qΜ, qest+2qΜ,... qest + (M-1)× qΜ}, де qΜ=2p/Μ, замість L різних значень, де L звичайне набагато більше, ніж М. Розподіл по θ повинен тоді містити тільки Μ значень або компонентів, і розподіл по θ і І повинен містити тільки M×Q компонентів. Обчислення для випереджувальних LLR і LLR зворотного зв'язку істотно спрощуються внаслідок меншого числа компонентів для оцінювання. Наприклад, якщо фаза каналу квантована на L = 8М значень, то оцінювання фази каналу з точністю до 2p/Μ по модулю знижує складність оцінювання каналу в 8 разів. Оцінювання фази каналу (наприклад, з використанням прийнятих символів даних) може використовуватися для будь-якої ітераційної схеми обробки в приймачі. На фіг. 8 показана блок-схема процесу 800 для виконання ітераційного оцінювання каналу і декодування з оцінкою фази каналу, отриманою з прийнятих символів даних. Для простоти процес 800 не враховує перешкоди. Спочатку фаза θ каналу оцінюється з точністю до діапазону від нуля до 2p/Μ на основі прийнятих символів даних (етап 808). Етап 808 може виконуватися з використанням першого або другого методу оцінювання фази каналу, описаних вище, і забезпечує оцінку фази 0est каналу. Апріорна інформація для фази каналу потім виходить на основі прийнятих символів пілот-сигналу для Μ (замість L) різних значень θ (етап 810). Етап 810 забезпечує розподіл по θ на основі прийнятих символів пілот-сигналу для Μ різних значень. Випереджувальні LLR для В кодових бітів кожного прийнятого символу даних потім обчислюються на основі прийнятого символу даних і апріорної інформації для фази каналу (етап 820). Етап 820 може виконуватися аналогічно описаному вище для етапу 520 на фіг. 5 або етапу 620 на фіг. 6. Випереджувальні LLR для всіх Ν Β кодових бітів декодуються для отримання LLR зворотного зв'язку для кодових бітів (етап 830). Апостеріорна ін 28 формація для фази каналу потім отримується для кожного прийнятого символу даних на основі LLR зворотного зв'язку для В кодових бітів цього символу і для Μ різних значень θ (етап 840). Апостеріорна інформація для фази каналу для ND прийнятих символів даних і апріорна інформація для фази каналу об'єднуються для отримання оновленої інформації для фази каналу для кожного прийнятого символу даних, знову для Μ різних значень θ (етап 850). Потім визначається, чи потрібно завершити ітераційне оцінювання каналу і декодування (етап 860). Якщо відповіддю є «ні», то процес повертається до етапу 820 для оновлення випереджувальних LLR для В кодових бітів кожного прийнятого символу даних на основі прийнятого символу даних і оновленого розподілу по q. У іншому випадку процес завершується. Знову, етап 860 може бути виконаний після етапу 830. Фіг. 5, 6 і 8 показують три конкретні схеми для виконання ітераційної обробки в приймачі Схема, показана на фіг. 5, ітераційним чином оновлює інформацію як для фази каналу, так і для перешкоди, схема, показана на фіг. 6, ітераційним чином оновлює інформацію для фази каналу і неітераційним способом оцінює перешкоду, і схема, показана на фіг. 8, ітераційним чином оновлює інформацію для фази каналу і використовує ін формацію про фазу, отриману з прийнятих символів даних. Різні інші ітераційні схеми також можуть бути реалізовані і також входять в об'єм винаходу. Наприклад, інформація як для фази каналу, так і для перешкоди, може ітераційним способом оновлюватися для малого числа ітерацій, і після цього інформація тільки для фази каналу може оновлюватися ітераційним способом. Як інший приклад, інформація для фази каналу може бути отримана однократно, а інформація для перешкоди може оновлюватися ітераційним способом. Як ще один приклад, число значень для фази каналу і перешкоди може меншати в подальших ітераціях. Оскільки розподіл стає більш компактним, деякі з точок мають знехтувано низькі імовірності і можуть ігноруватися. З ура хуванням фіг. 3 і 4, ітераційна схема оцінювання каналу і перешкоди і декодування може розглядатися як ітерація між декодером 340 і детектором 360 апостеріорної імовірності (АРР) (з проміжними канальним оберненим перемежовувачем 336 і канальним перемежовувачем 342). АРРдетектор повертає розподіл по біту (тобто LLR), в той час як МАР-детектор повертає найбільш ймовірне значення біта (тобто 0 або 1). АРР-де тектор 360 використовує інформацію зворотного зв'язку (LLR, які надходять) від декодера 340 і прийняті символи пілот-сигналу і даних (прийняті значення) для отримання випереджувальної інформації (оновлених LLR) для декодера 340. АРР-детектор 360 оцінює канал і перешкоду на основі інформації зворотного зв'язку і прийнятих значень, і інформація про канал і перешкоду відбивається в випереджувальній інформації, що забезпечується АРРдетектором 360 для декодера 340. Інші типи детектора, відомі в техніці також можуть використовуватися для АРР-детектора. 29 84740 На графі Таннера 400, вузол 410 оцінювання каналу і перешкоди, вузли 420 детектування, вузли 440 оцінювання представляють одну реалізацію МАР-детектора 360. МАР-детектор 360 також може бути реалізований іншими способами, які входять в об'єм винаходу. Згідно з фіг. 3, процесор RX-даних 330 може реалізувати будь-яку схему обробки в приймачі Для показаної на фіг. 5 схеми блок 332 оцінки виконує етапи 510, 540 і 550, детектор 334 виконує етап 520 і декодер 340 виконує етап 530. Для схеми, показаної на фіг. 6, блок 332 оцінки виконує етапи 610, 640 і 650, детектор 334 виконує етап 620 і декодер 340 виконує етап 630. Для схеми, показаної на фіг. 8, блок 332 оцінки виконує етапи 808, 810, 840 і 850, детектор 334 виконує етап 820, і декодер 340 виконує етап 830. Для прикладу, нижче описана обробка, що виконується процесором 330 RX-даних, для схеми, показаної на фіг. 4 і 5. Блок 332 оцінювання каналу і перешкоди реалізовує вузол 410 і вузли 440а440n оцінювання на фіг. 4. Для першої ітерації блок 332 оцінювання каналу і перешкоди отримує прийняті символи пілот-сигналу від OFDMдемодулятора 320, виводить апріорну інформацію для фази каналу і перешкоди на основі прийнятих символів пілот-сигналу і видає апріорну інформацію в детектор 334. Для кожної подальшої ітерації блок 332 оцінювання отримує прийняті символи пілот-сигналу від OFDM-демодулятора 320 і LLR зворотного зв'язку для В кодових бітів кожного прийнятого символу даних від канального перемежовувача 342, виводить апостеріорну інформацію для посилення каналу і перешкоди для кожного прийнятого символу даних, об'єднує апостеріорну інформацію і апріорну інформацію і видає оновлену інформацію для посилення каналу і перешкоди для кожного прийнятого символу даних на детектор 334. Детектор 334 реалізовує вузли 420а-420n детектування на фіг. 4. Детектор 334 отримує прийняті символи даних від OFDM-демодулятора 320 і апріорну/оновлюючу інформацію для фази каналу і перешкоди з блока 332 оцінювання. Детектор 334 обчислює випереджувальні LLR для В кодових бітів кожного прийнятого символу даних на основі апріорної/оновлюючої інформації і прийнятого символу даних і видає випереджувальні LLR на канальний обернений перемежовувач 336. Канальний обернений перемежовувач 336 виконує обернене переміщення для випереджувальних LLR. Декодер 340 виконує декодування обернено переміщених випереджувальних LLR і видає LLR зворотного зв'язку для В кодових бітів кожного прийнятого символу даних на канальний перемежовувач 342. Канальний перемежовувач 342 виконує перемежовування LLR зворотного зв'язку і видає перемежовані LLR зворотного зв'язку на блок 332 оцінювання. Як описано вище, інформація для фази каналу і перешкоди представлена розподілами імовірності Крім того, випереджувальна інформація і інформація зворотного зв'язку представлена за допомогою LLR. Інші представлення також можуть використовува тися для фази каналу і перешкоди і 30 кодових бітів, які також входять в об'єм даного винаходу. Наприклад, можуть використовуватися представлення в логарифмічній області інверсні імовірності і т. д. Обчислення для різних етапів на фіг. 5, 6 і 8 залежать від конкретних представлень, що використовуються для фази каналу, перешкоди і кодових бітів. Для ясності конкретно описане обчислення для кожного з етапів на фіг. 5. Кожний етап може також отримувати свою інформацію іншими способами, що входять в об'єм винаходу. Як приклад, для етапу 510 на фіг. 5, прийняті символи пілотсигналу можуть оброблятися для отримання оцінки пілот-сигналу, яка вказує на нормалізоване представлення каналу для символів пілот-сигналу, як показано рівнянням (2). Оцінка пілот-сигналу може бути отримана (1) множенням прийнятих символів пілот-сигналу на комплексно-зв'язаний символ пілот-сигналу для видалення модуляції пілот-сигналу і (2) максимального об'єднання всіх символів пілот-сигналу, прийнятого для відновлюваного блока символів. Оцінка пілот-сигналу потім використовується для отримання спільного розподілу імовірності по θ і І для апріорної інформації для фази каналу і перешкоди. Для простоти в описі приведеному вище, передбачається, що амплітуда каналу відома в приймачі (наприклад, визначена за допомогою деяких засобів) і ітераційним способом оцінюється тільки фаза каналу. Амплітуда каналу також може оцінюватися ітераційним способом разом з фазою каналу, хоч і за рахунок підвищення складності. Описані ітераційні способи обробки в приймачі можуть використовуватися для різних систем безпровідного зв'язку, таких як система, основана на OFDM, система з множиною входів і множиною виходів (ΜΙΜΟ) і т. д. Ці методи можуть також використовуватися для прямої (низхідної) лінії зв'язку і для зворотної (висхідної) лінії зв'язку. Для низхідної лінії зв'язку передавач 200 є частиною пункту доступ у або базовою станцією, а приймач 300 є частиною користувацького термінала або віддаленою станцією. Для висхідної лінії зв'язку передавач 200 є частиною користувацького термінала, а приймач 300 - частиною пункту доступу. Описані ітераційні способи обробки в приймачі можуть бути реалізовані різними засобами. Наприклад, ці методи можуть бути реалізовані апаратними засобами, програмним забезпеченням або комбінацією обох типів засобів. У разі апаратної реалізації^ блоки обробки, що використовуються для ітераційної обробки в приймачі (наприклад, процесор 330 RX-даних на фіг. 3), можуть бути реалізовані на одній або більшій кількості спеціалізованих інтегральних схемах (ASIC), ци фрових процесорах сигналів (DSP), пристроях цифрової обробки сигналів (DSPD), програмованих логічних пристроях (PLD), програмованих користувачем вентильних матрицях (FPGA), процесорах, контролерах, мікроконтролерах, мікропроцесорах, інших електронних блоках, призначених для виконання описаних функцій, або комбінаціях вказаних засобів. Для реалізації за допомогою програмного забезпечення ітераційні методи обробки в приймачі 31 84740 можуть бути реалізовані за допомогою модулів (наприклад, процедур, функцій і т. д.), які виконують описані функції. Програмні коди можуть бути збережені в блоці пам'яті (наприклад, в блоці 352 пам'яті на фіг. 3) і можуть виконуватися процесором (наприклад, контролером 350). Блок пам'яті може бути реалізований в процесорі або зовнішнім чином по відношенню до процесора. Приведений вище опис розкритих варіантів здійснення призначений для того, щоб забезпечити можливість фахівцям в даній галузі техніки реалізувати або використати даний винахід. Різні модифікації цих варіантів здійснення повинні бути очевидні для фахівців в даній галузі техніки, а загальні визначені тут принципи можуть застосовуватися до інших варіантів здійснення без відхилення від суті і об'єму винаходу. Таким чином, винахід не обмежується представленими варіантами здійснення, а повинен відповідаги найширшому об'єму, сумісному з розкритими принципами і новими ознаками. Перелік посилальних позицій 200 Передавач 210 Джерело даних 220 Процесор ТХ-даних 222 Кодер 224 Канальний перемежовувач 226 Відображення символів 230 OFDM-модулятор 232 Процесор TXFH 234 ЗШПФ 236 Генератор циклічного префікса 242 Передавальний блок 250,350 Контролер 252,352 Пам'ять 300 Приймач 314 Приймальний блок 320 OFDM-демодулятор 322 Видалення циклічного префікса 324 ШПФ 326 Процесор RX FH/демультиплексор 330 Процесор RX-даних 332 Блок оцінювання каналу і перешкоди 334 Детектор 336 Канальний обернений перемежовувач 340 Декодер 342 Канальний перемежовувач 348 Приймач даних 360 АРР-детектор 360 МАР-де тектор 336 Канальний обернений перемежовувач 342 Канальний перемежовувач 410 Вузол оцінювання каналу і перешкоди 510 Отримання апріорної інформації для посилення каналу і перешкоди на основі прийнятих символів пілот-сигналу 520 Обчислення випереджувальних LLR для кодових бітів кожного прийнятого символу даних (тобто випереджувальної інформації) на основі прийнятого символу даних і інформації для посилення каналу і перешкоди 32 530 Декодування випереджувальних LLR для кодових бітів всі х прийнятих символів даних в блоці для отримання LLR зворотного зв'язку для всіх кодових бітів (тобто інформації зворотного зв'язку) 540 Виведення апостеріорної для посилення каналу і перешкоди для кожного прийнятого символу даних на основі LLR зворотного зв'язку для кодових бітів прийнятого символу даних 550 Об'єднання апостеріорної і апріорної інформації для посилення каналу і перешкоди для отримання оновленої інформації для посилення каналу і перешкоди для кожного прийнятого символу даних 560, 660, 860 Завершити? 610 Отримання апріорної інформації для посилення каналу і оцінки перешкоди на основі прийнятих символів пілот-сигналу 620 Обчислення випереджувальних LLR для кодових бітів кожного прийнятого символу даних (тобто випереджувальної інформації) на основі прийнятого символу даних і інформації для посилення каналу і оцінки перешкоди 630 Декодування випереджувальних LLR для кодових бітів всі х прийнятих символів даних в блоці для отримання LLR зворотного зв'язку для всіх кодових бітів (тобто інформації зворотного зв'язку) 640 Виведення апостеріорної для посилення каналу для кожного прийнятого символу даних на основі LLR зворотного зв'язку для кодових бітів прийнятого символу даних і оцінки перешкоди 650 Об'єднання апостеріорної і апріорної інформації для посилення каналу для отримання оновленої інформації для посилення каналу для кожного прийнятого символу даних 808 Оцінка фази каналу в діапазоні від нуля до 2p/Μ на основі прийнятих символів даних 810 Отримання апріорної інформації для посилення каналу для Μ різних значень фази каналу на основі прийнятих символів пілот-сигналу 820 Обчислення випереджувальних LLR для кодових бітів кожного прийнятого символу даних (тобто випереджувальної інформації) на основі прийнятого символу даних і інформації для посилення каналу 830 Декодування випереджувальних LLR для кодових бітів всі х прийнятих символів даних в блоці для отримання LLR зворотного зв'язку для всіх кодових бітів (тобто інформації зворотного зв'язку) 840 Виведення апостеріорної для посилення каналу для Μ різних значень фази каналу, для кожного прийнятого символу даних на основі LLR зворотного зв'язку для кодових бітів прийнятого символу даних 850 Об'єднання апостеріорної і апріорної інформації для посилення каналу для отримання оновленої інформації для посилення каналу для кожного прийнятого символу даних 33 84740 34 35 84740 36 37 84740 38 39 Комп’ютерна в ерстка Д. Шев ерун 84740 Підписне 40 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюInteractive estimation and decoding channels and interference
Автори англійськоюKhandekar, Aamod, Agraval Avnish, Lin Fuiun
Назва патенту російськоюИнтерактивное оценивание и декодирование каналов и помех
Автори російськоюКхандекар Аамод, Агравал Авниш, Лин Фуюнь
МПК / Мітки
МПК: H04L 1/00, H04L 25/03
Мітки: ітеративне, каналів, оцінювання, декодування, перешкод
Код посилання
<a href="https://ua.patents.su/20-84740-iterativne-ocinyuvannya-i-dekoduvannya-kanaliv-i-pereshkod.html" target="_blank" rel="follow" title="База патентів України">Ітеративне оцінювання і декодування каналів і перешкод</a>
Спосіб аналогового декодування м-ічних лінійних кодів
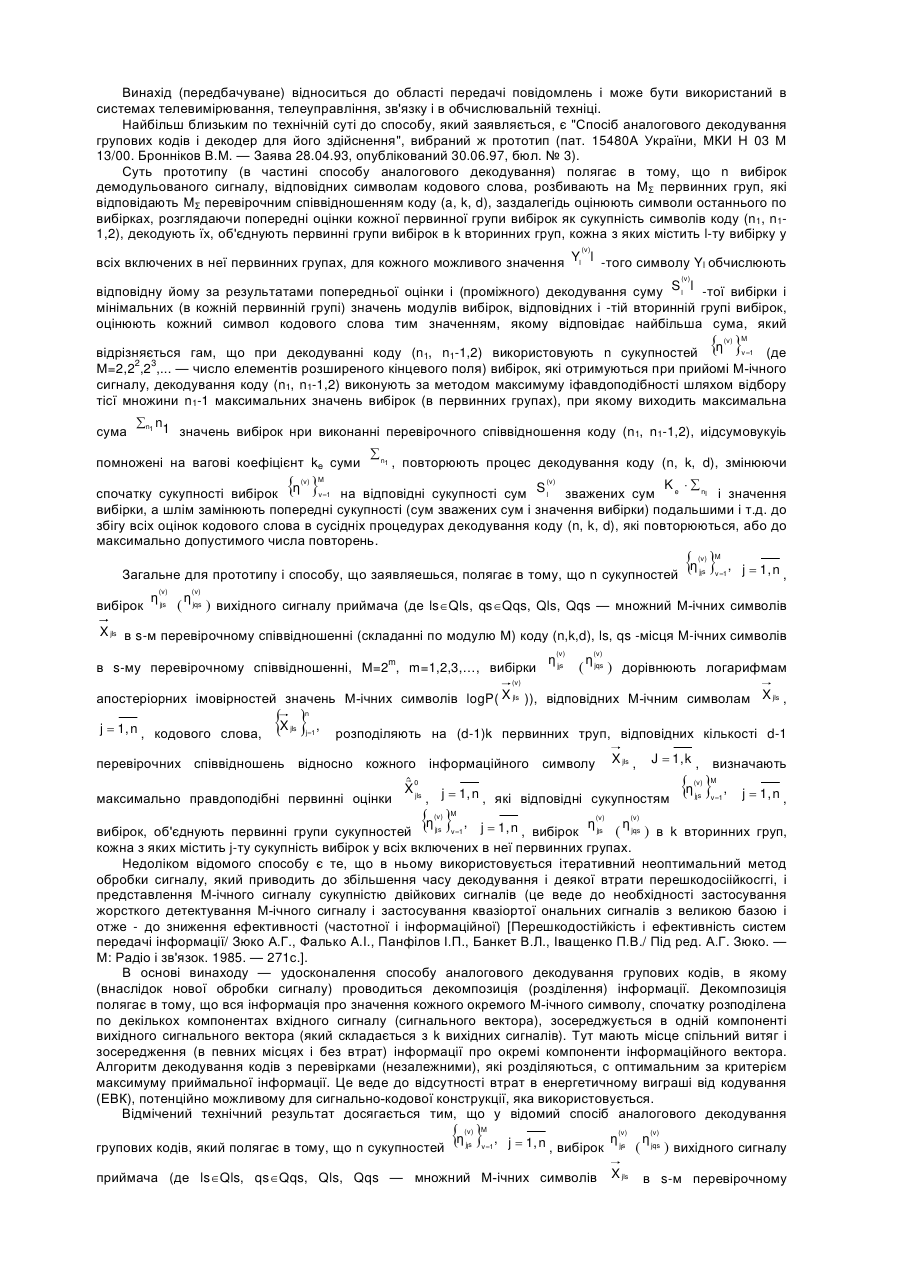
Номер патенту: 62990
Опубліковано: 15.01.2004
Автори: Прихоженко Боріс Юрьевіч, Поддубняк Владимир Йосифович, Бронніков Вадим Миколайович
МПК: H03M 13/00
Мітки: спосіб, аналогового, лінійних, декодування, м-ічних, кодів
Формула / Реферат:
Спосіб аналогового декодування М-ічних лінійних кодів, який полягає в тому, що n сукупностей , , вибірок вихідною сигналу приймача (де - множини М-ічних символів
Спосіб аналогового декодування бінарних кодів

Номер патенту: 38927
Опубліковано: 15.05.2001
Автори: Зорі Анатолій Анатолійович, Кувшинов Генадій Іванович, Банкет Віктор Леонідович, Кузнецова Оксана Миколайовна, Бронніков Вадим Миколайович
МПК: H03M 13/00
Мітки: спосіб, декодування, аналогового, бінарних, кодів
Формула / Реферат:
Спосіб аналогового декодування бінарних кодів, який полягає у тому, що з вхідного сигналу Uвx(t) одержують і запам'ятовують вибірок відповідних символам кодового слова, роблять ітеративне m раз аналогове декодування відповідно m рівням ітеративного кодування, починаючи з m-го рівня кодування, так що в результаті аналогового декодування кодових слів r-го рівня кодування одержують - кількість інформаційних і кодових символів кодових слів i-го...
Спосіб аналогового декодування бінарних кодів
Номер патенту: 44861
Опубліковано: 15.03.2002
Автори: Кузнєцова Оксана Миколаївна, Бронніков Вадим Миколайович, Зорі Анатолій Анатолійович
МПК: H03M 13/00
Мітки: декодування, кодів, спосіб, аналогового, бінарних
Формула / Реферат:
Спосіб аналогового декодування бінарних кодів, який полягає в тому, що з вхідного сигналу Uвx(t) одержують і запам'ятовують n виборок hj1…jr…jm, де які відповідають символам Yj1…jr…jm кодового слова, виконують ітеративно m разів...
Спосіб оптичного передавання з кодовим розділенням каналів
Номер патенту: 32925
Опубліковано: 10.06.2008
Автори: Климаш Михайло Миколайович, Демидов Іван Васильович, Андрухів Тарас Васильович
МПК: H04J 13/02
Мітки: оптичного, передавання, спосіб, каналів, розділенням, кодовим
Формула / Реферат:
Спосіб оптичного передавання з кодовим розділенням каналів, який полягає в тому, що вхідну інформацію на передавальній стороні представляють набором ортогональних кодових слів, на основі яких модулюють оптичне випромінювання, яке після цього ущільнюють за спектром та передають через оптичне волокно на приймальну сторону, демультиплексують за спектром, детектують і перетворюють в електричну форму, паралельно обробляють кожне кодове слово-канал...
Спосіб і пристрій кодування, а також спосіб і пристрій декодування інформації, що складається з множини слів,та унітарний носій закодованої інформації
Номер патенту: 65588
Опубліковано: 15.04.2004
Автори: Калман Джозеф А.Х.М., ван Дейк Мартен Е., Багген Констант П.М.Дж., Хатторі Масаюкі, Нарахара Тацуя, Ямамото Коухей, Сеншу Сусуму, Толуйзен Лудовікус М.Г.М.
МПК: H03M 13/00, H03M 13/27
Мітки: декодування, також, кодування, множині, закодованої, спосіб, складається, пристрій, носій, унітарний, інформації, слів,та
Формула / Реферат:
1. Спосіб кодування інформації, що складається з множини слів, в основі якої - багатобітові символи, розташовані на носії так, що їх місцезнаходження задають певне відношення між вказаними багатобітовими символами, якій притаманні такі властивості, як послівне розпорошення і послівне кодування з захистом від помилок, і в якій для цього серед груп слів, які складаються з множини слів, запроваджені ключі виявлення помилок, який відрізняється...
Попередній патент: Замок застібки-блискавки
Наступний патент: Спосіб боротьби з корозією, викликаною нафтеновими кислотами
Випадковий патент: Пристрій для вловлювання крапельної рідини з газового потоку