Спосіб та пристрій для ультразвукової дефектоскопії коліс залізничних вагонів
Формула / Реферат
1. Випробувальна арматура ультразвукової дефектоскопії колеса, яка містить:
безліч провідних роликів, на які спирається колесо, при цьому щонайменше один з безлічі провідних роликів має:
перший кільцевий відрізок, закріплений навколо провідного вала,
другий кільцевий відрізок, встановлений з можливістю ковзного контакту навколо провідного вала і такий, що прилягає до першого кільцевого відрізка, у результаті чого між першим кільцевим відрізком і другим кільцевим відрізком утворюється поглиблення для контакту з колесом,
кріпильний елемент, що з'єднує перший кільцевий відрізок з другим кільцевим відрізком, причому другий кільцевий відрізок здатний переміщатися в осьовому напрямку відносно першого кільцевого відрізка,
пружний елемент, який змушує другий кільцевий відрізок переміщатися у бік першого кільцевого відрізка, і
привідний електродвигун, з'єднаний із провідним валом для обертання щонайменше одного з безлічі провідних роликів.
2. Випробувальна арматура ультразвукової дефектоскопії за п. 1, яка додатково містить отвір, що проходить крізь другий кільцевий відрізок, при цьому кріпильний елемент знаходиться в ковзному контакті з отвором.
3. Випробувальна арматура ультразвукової дефектоскопії за п. 1, у якій кріпильний елемент прикріплений до першого кільцевого відрізка.
4. Випробувальна арматура ультразвукової дефектоскопії за п. 1, яка додатково містить:
перший отвір, який проходить крізь перший кільцевий відрізок, і
другий отвір, який проходить крізь другий кільцевий відрізок,
при цьому кріпильний елемент проходить крізь перший і другий отвори.
5. Випробувальна арматура ультразвукової дефектоскопії за п. 4, у якій кріпильний елемент знаходиться в ковзному контакті з другим отвором.
6. Випробувальна арматура ультразвукової дефектоскопії за п. 4, у якій перший отвір є різьбовим для контакту із кріпильним елементом.
7. Випробувальна арматура ультразвукової дефектоскопії за п. 1, яка додатково містить бак.
8. Випробувальна арматура ультразвукової дефектоскопії за п. 7, яка додатково містить раму в зборі, на якій встановлений бак, всередині якого додатково встановлено безліч провідних роликів.
9. Випробувальна арматура ультразвукової дефектоскопії за п. 7, у якій безліч провідних роликів встановлено всередині бака, у якому додатково міститься контактне текуче середовище.
10. Випробувальна арматура ультразвукової дефектоскопії за п. 8, яка додатково містить обмежувальний ролик, встановлений на рамі в зборі і який служить для вибірного контакту з колесом з метою збереження вертикальної орієнтації колеса на безлічі провідних роликів.
11. Випробувальна арматура ультразвукової дефектоскопії колеса, яка містить:
безліч провідних роликів, на які спирається колесо, причому щонайменше один з безлічі провідних роликів призначений для колеса, де щонайменше один з безлічі провідних роликів має:
циліндричний елемент, прикріплений до провідного вала,
кільцевий відрізок, встановлений з можливістю ковзного контакту навколо провідного вала і який примикає до циліндричного елемента, у результаті чого між циліндричним елементом і кільцевим відрізком утворюється поглиблення для контакту з колесом,
кріпильний елемент, який з'єднує циліндричний елемент із кільцевим відрізком, причому кільцевий відрізок здатний переміщатися в осьовому напрямку відносно циліндричного елемента,
пружний елемент, що змушує кільцевий відрізок переміщатися у бік циліндричного елемента, і
привідний електродвигун, з'єднаний із провідним валом для обертання щонайменше одного з безлічі провідних роликів.
12. Випробувальна арматура ультразвукової дефектоскопії за п. 11, яка додатково містить отвір, що проходить крізь циліндричний елемент, при цьому кріпильний елемент знаходиться в ковзному контакті з отвором.
13. Випробувальна арматура ультразвукової дефектоскопії за п. 11, яка додатково містить:
перший отвір, що проходить крізь циліндричний елемент, і
другий отвір, що проходить крізь кільцевий відрізок,
при цьому кріпильний елемент проходить крізь перший і другий отвори.
14. Випробувальна арматура ультразвукової дефектоскопії за п. 13, у якій кріпильний елемент знаходиться в ковзному контакті з першим отвором у циліндричному елементі.
15. Випробувальна арматура ультразвукової дефектоскопії за п. 13, у якій кріпильний елемент є нерухомим відносно кільцевого відрізка.
16. Випробувальна арматура ультразвукової дефектоскопії за п. 11, яка додатково містить бак для контактного текучого середовища.
17. Випробувальна арматура ультразвукової дефектоскопії за п. 11, яка додатково містить бак для контактного текучого середовища, всередині якого встановлено безліч провідних роликів.
18. Випробувальна арматура ультразвукової дефектоскопії за п. 16, яка додатково містить раму в зборі, на якій встановлений бак, додатково всередині якого встановлено безліч провідних роликів.
19. Випробувальна арматура ультразвукової дефектоскопії за п. 18, яка додатково містить обмежувальний ролик, встановлений на рамі в зборі і який служить для вибірного контакту з колесом з метою збереження вертикальної орієнтації колеса на безлічі провідних роликів.
20. Спосіб ультразвукової дефектоскопії колеса, у якому:
встановлюють колесо на безліч провідних роликів, щонайменше один з яких призначений для обертання колеса, при цьому щонайменше один з безлічі провідних роликів має:
циліндричний елемент, прикріплений до провідного вала, і
кільцевий відрізок, що примикає до циліндричного елемента, в результаті чого між циліндричним елементом і кільцевим відрізком утворюється поглиблення для контакту з колесом, при цьому кільцевий відрізок здатний зміщатися в осьовому напрямку відносно циліндричного елемента для пристосування до змін товщини колеса,
підтримують за допомогою циліндричного елемента та кільцевого відрізка стискальне зусилля, що діє на колесо, при цьому кільцевий відрізок зміщається в осьовому напрямку, і
за допомогою привідного електродвигуна обертають вал з метою надання обертання щонайменше одному з безлічі провідних роликів.
Текст
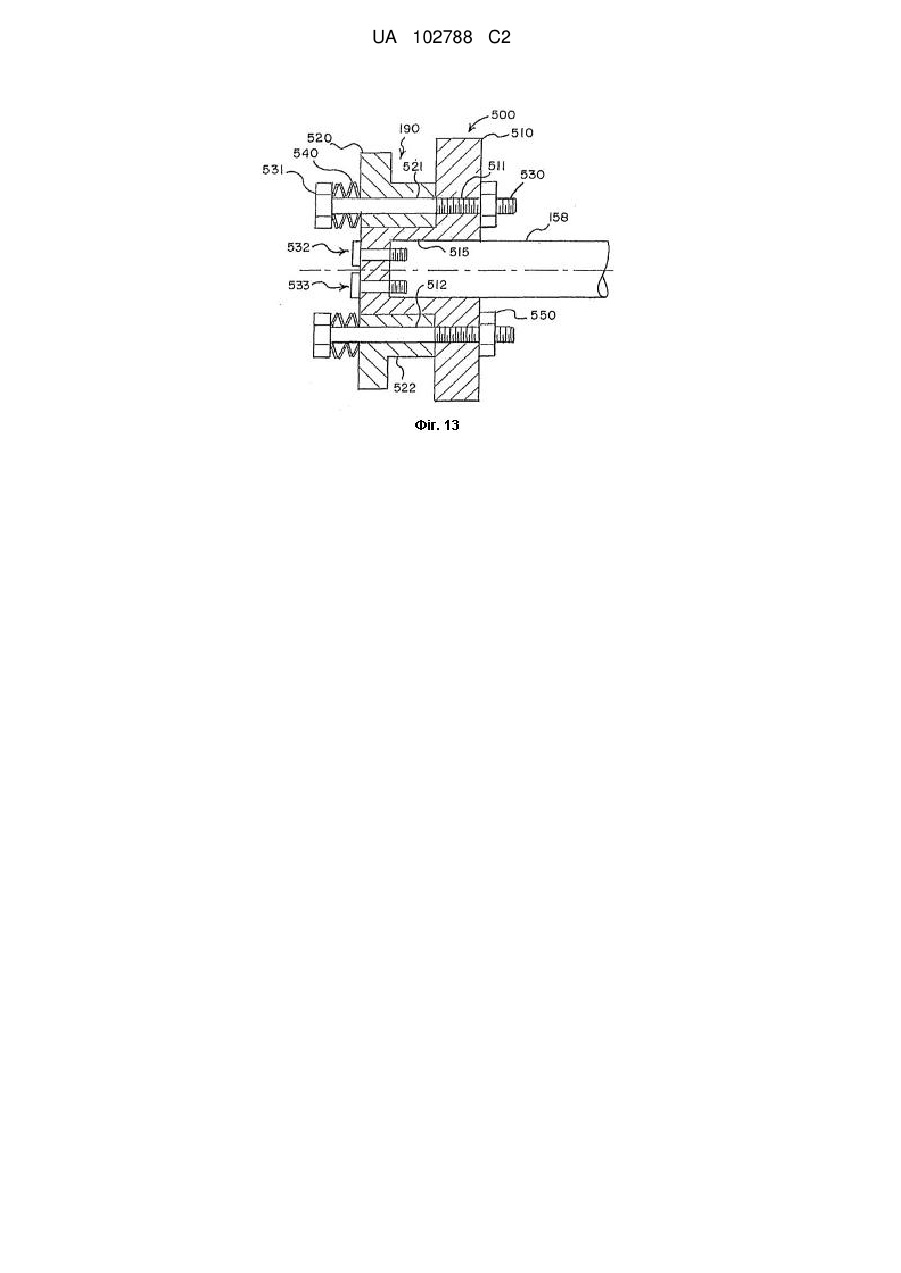
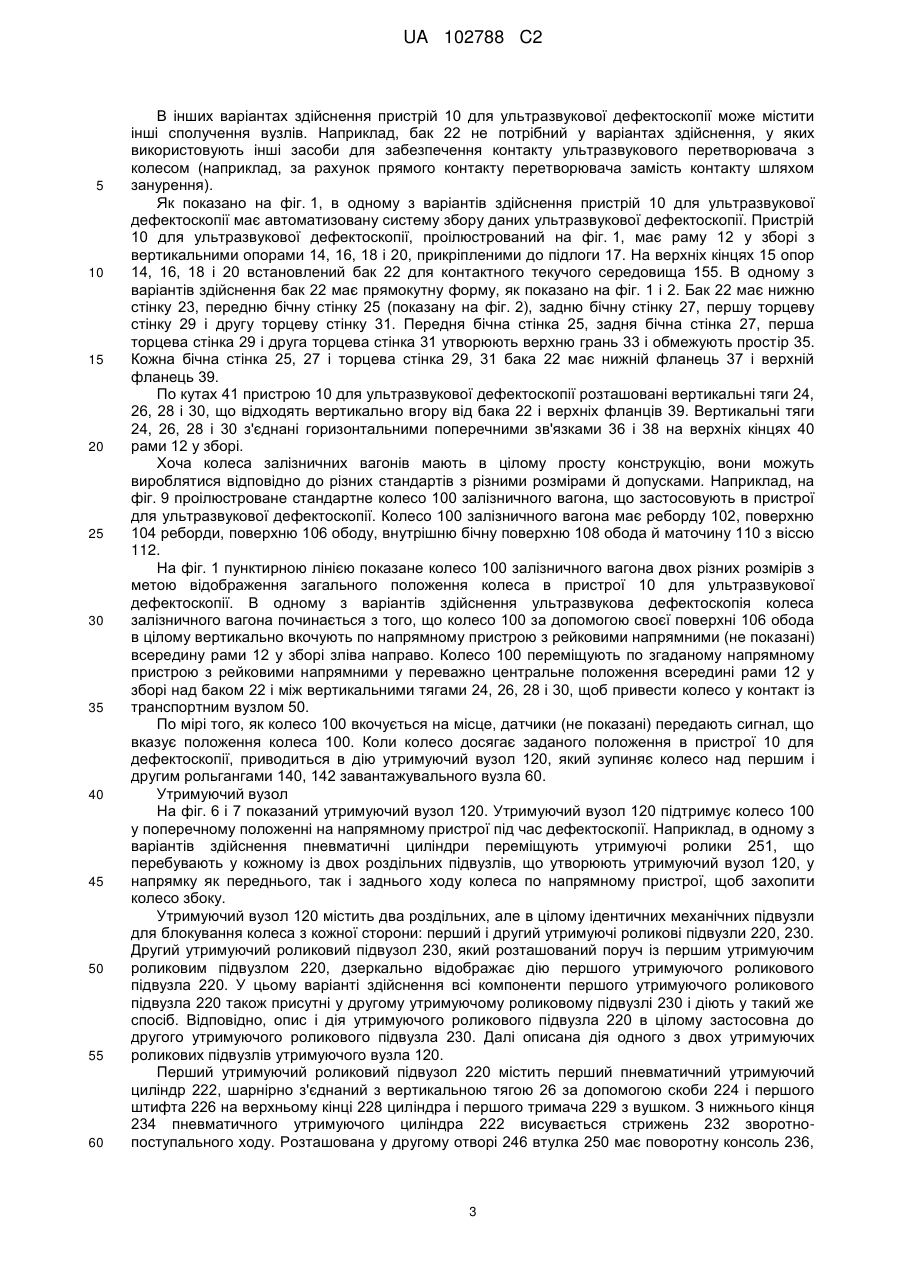
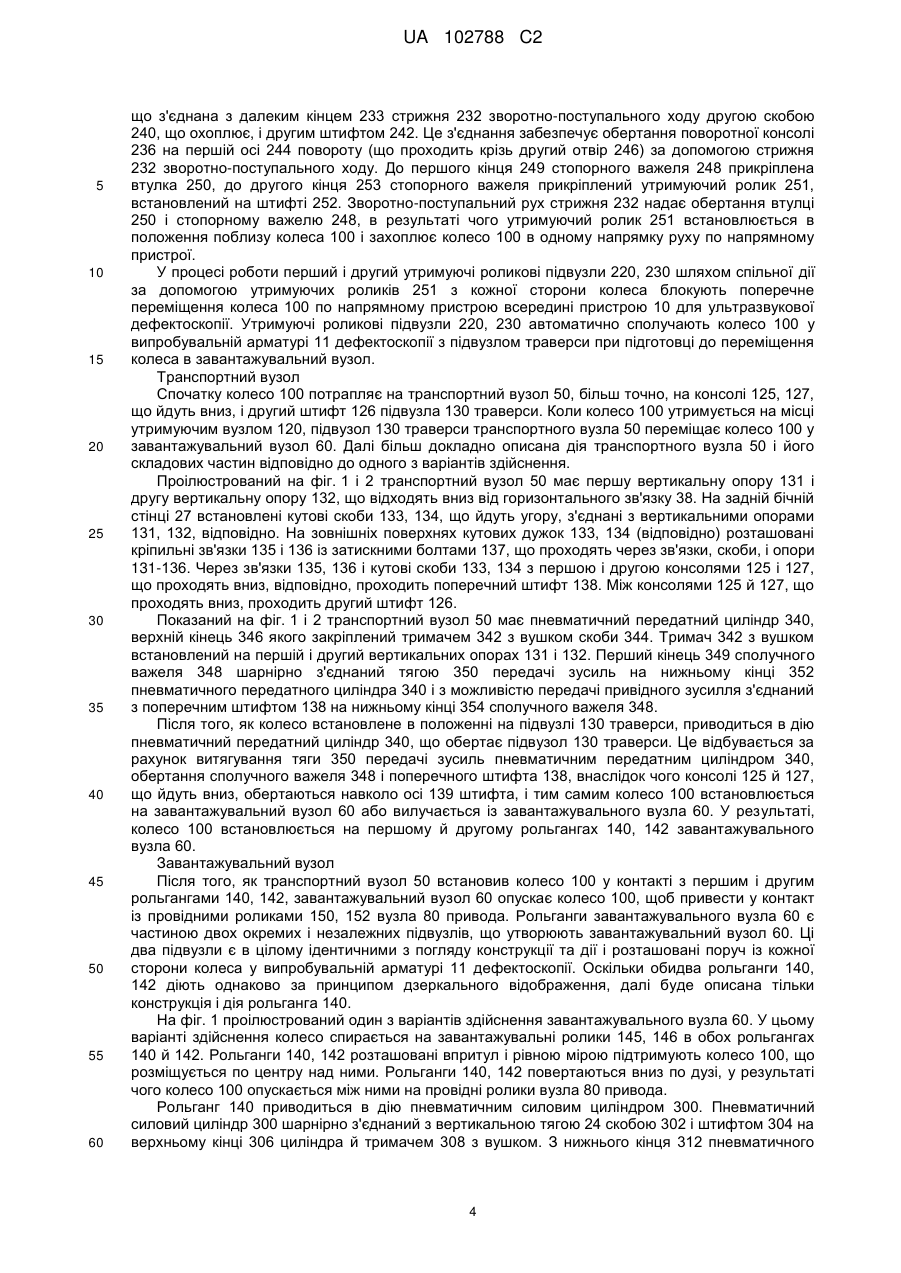
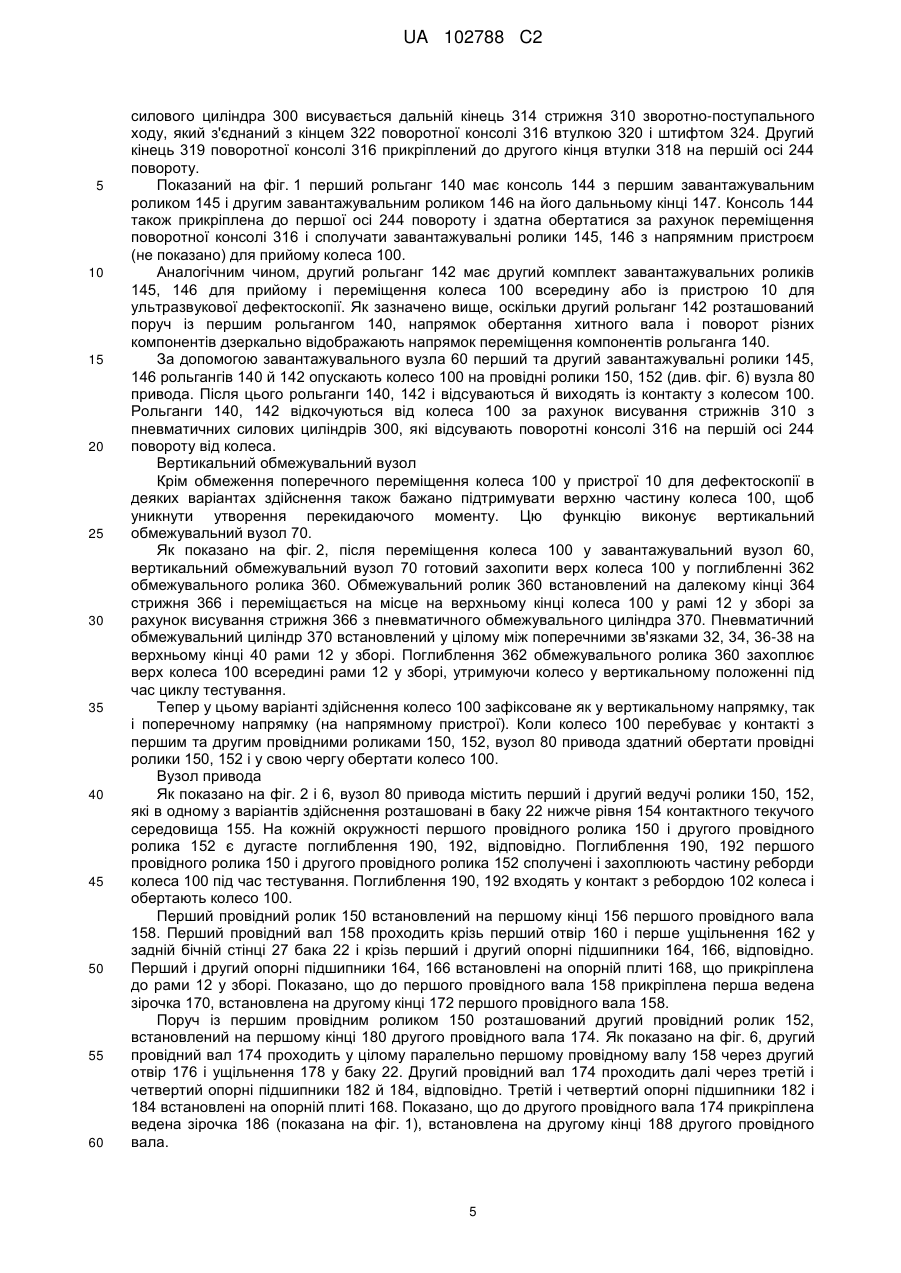
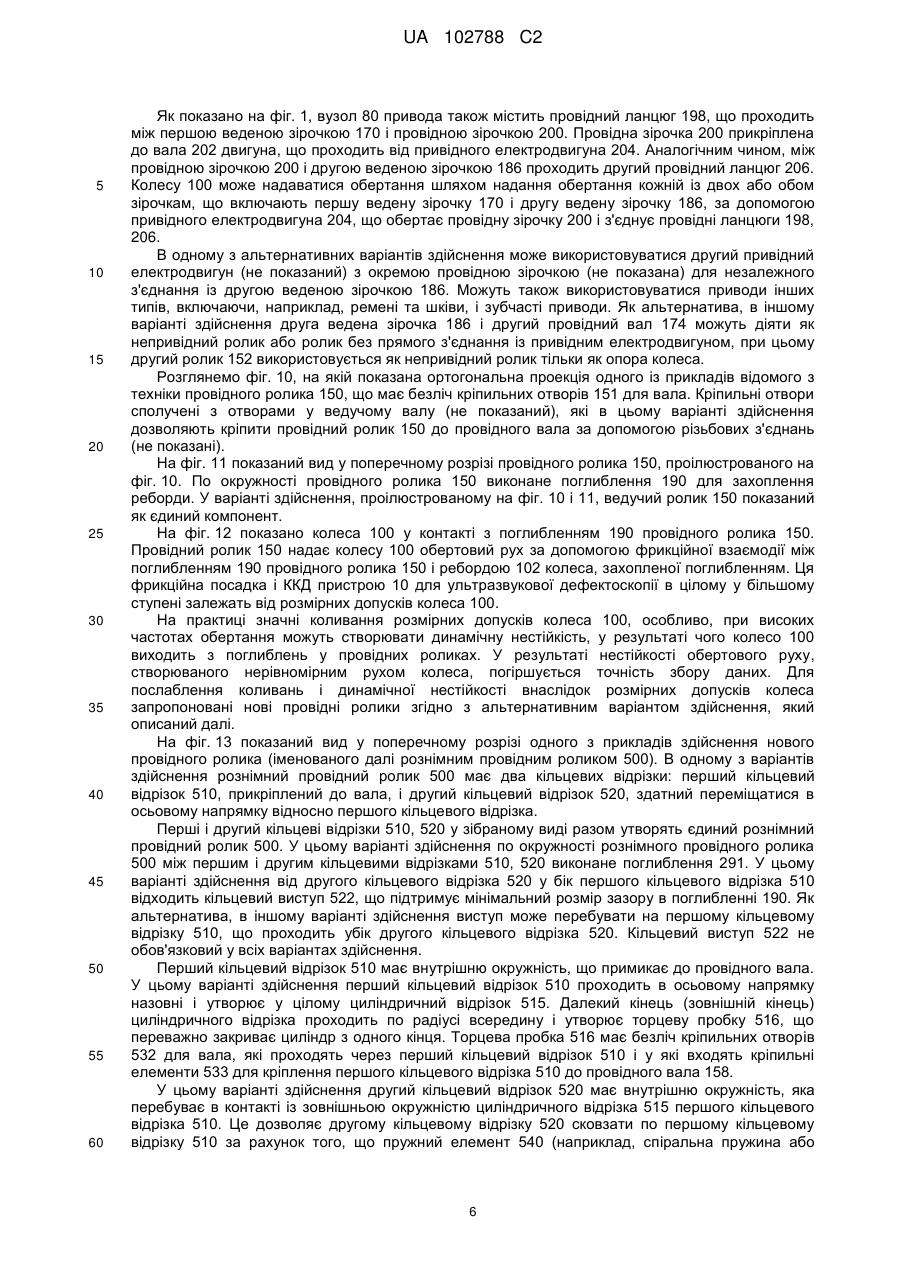
Реферат: У заявці описаний спосіб збору даних ультразвукової дефектоскопії колеса залізничного вагона за допомогою пристрою для ультразвукової дефектоскопії. Колесо залізничного вагона встановлюють на два провідних ролики, кожний з яких має поглиблення для контакту з колесом і його обертання. Перетворювач, що індексує, переміщається по колесу, що обертається, збираючи дані ультразвукової дефектоскопії, а нерухомий перетворювач зіставляє точку відліку на колесі із зібраними даними випробувань. Для забезпечення точності зіставлення точки відліку із зібраними даними випробувань бажано підтримувати обертальну стійкість колеса шляхом зведення до мінімуму динамічної нестійкості внаслідок розмірних допусків колеса. Для зменшення нестійкості внаслідок розмірних допусків зазор поглиблення провідних роликів, які входять у контакт із ребордою колеса, регулюють із використанням пружного елемента для підтримки фрикційного контакту між колесом і провідним роликом. Це дозволяє поглибленню пристосовуватися до розмірних допусків реборди колеса, що змінюються, і тим самим знижувати ймовірність динамічної нестійкості внаслідок виходу реборди колеса з поглиблення. UA 102788 C2 (12) UA 102788 C2 UA 102788 C2 5 10 15 20 25 30 35 40 45 50 55 60 Дана заявка належить до Патенту США № 5,864,065, виданому 26 січня 1999 року на Proroka під назвою "Випробувальний пристрій для коліс залізничних вагонів", який включено до даної заявки в повному обсязі за посиланням. Даний винахід належить до ультразвукової дефектоскопії, більш точно, в одному з варіантів здійснення до ультразвукової дефектоскопії коліс залізничних вагонів. Відомості про попередній рівень техніки Колеса залізничних вагонів зазвичай являють собою суцільнокатані або литі сталеві колеса, які, незважаючи на суворі заходи контролю якості, можуть мати дефекти, що утворюються в процесі виготовлення. Ці дефекти можуть потенційно включати раковини, тріщини, а також включення, які здатні послаблювати колесо і потенційно призводити до пошкодження колеса. Для виявлення таких дефектів зазвичай застосовується ультразвукова дефектоскопія. Для ультразвукової дефектоскопії коліс залізничних вагонів використовують датчики, що знаходяться у фіксованих положеннях, які зазвичай досліджують колесо і його глибинну структуру тільки в окремих конкретних положеннях по периметру обода або реборди колеса. Для одержання більш повних діагностичних даних всієї структури колеса без докладного аналізу, необхідного у випадку використання фіксованого датчика, був розроблений спосіб автоматизованої ультразвукової дефектоскопії. Можливості автоматизованої ультразвукової дефектоскопії до певної міри обмежені розміром і вагою коліс залізничних вагонів (які зазвичай важать від 317,5 до 453,5 кг), що може ускладнювати автоматизований збір точних даних ультразвукової дефектоскопії. Особливі складності виникають у випадку коліс із розмірними допусками, які, хоча й знаходяться у діапазоні прийнятних значень для цілей виробництва, перешкоджають автоматизованому збору точних даних дефектоскопії. У відомих з техніки пристроях для дефектоскопії стандартне колесо залізничного вагона може мати розмірні допуски, здатні створювати динамічну нестійкість при наданні колесу обертання з метою проведення ультразвукової дефектоскопії. Ця нестійкість призводить до відхилення колеса від осьового обертання навколо свого геометричного центра у випробувальній арматурі. Це створює ускладнення, оскільки для збору точних даних ультразвукової дефектоскопії часто потрібно забезпечувати стійку геометричну орієнтацію колеса під час обертання. Суть винаходу У винаході запропоновані спосіб та пристрій для автоматизованої ультразвукової дефектоскопії колеса залізничного вагона. Для підвищення швидкості збору даних, а також одержання більш точних і відтворюваних даних ультразвукової дефектоскопії запропоновані нові спосіб та пристрій, у яких послаблені коливання та інша динамічна нестійкість, що виникає при обертанні колеса залізничного вагона у випробувальній арматурі ультразвукової дефектоскопії. Більш точно, запропонований новий вузол приводу випробувальної арматури ультразвукової дефектоскопії, у якому адаптивно враховуються розмірні допуски колеса, що обертається, залізничного вагона шляхом гасіння відхилень та інших коливань, у противному випадку здатних позначатися на точності й відтворюваності даних ультразвукової дефектоскопії. Короткий опис креслень Далі будуть описані різні варіанти здійснення пристрою для ультразвукової дефектоскопії з посиланням на креслення, що додаються. Креслення наведені лише як приклади і не повинні розглядатися як обмеження винаходу. Відповідно, пристрій для ультразвукової дефектоскопії та випробувальна арматура ультразвукової дефектоскопії проілюстровані як приклад, а не обмеження на супровідних кресленнях, на яких: на фіг. 1 показаний вид у поперечному вертикальному розрізі одного із прикладів здійснення пристрою для ультразвукової дефектоскопії, на фіг. 2 показаний вид у поперечному вертикальному розрізі по лінії 2-2 на фіг. 1, на фіг. 3 показана вертикальна проекція монтажної стійки і датчика положення в зборі пристрою для ультразвукової дефектоскопії, проілюстрованого на фіг. 1, на фіг. 4 показана бічна проекція датчика положення в зборі, проілюстрованого на фіг. 3; на фіг. 5 показаний один з варіантів здійснення, що ілюструє принципову схему керування пристрою для ультразвукової дефектоскопії відповідно до приклада, проілюстрованого на фіг. 1, на фіг. 6 показаний вид у плані пристрою для ультразвукової дефектоскопії, проілюстрованого на фіг. 1, на фіг. 7 показаний вид у вертикальному розрізі по лінії 7-7 на фіг. 6, на фіг. 8 показаний вид у плані одного з варіантів здійснення датчика положення в зборі, на фіг. 9 показане ізометричне зображення одного з прикладів колеса залізничного вагона, 1 UA 102788 C2 5 10 15 20 25 30 35 40 45 50 55 на фіг. 10 показана ортогональна проекція одного із прикладів відомого з техніки цільного провідного ролика, на фіг. 11 показаний вид у поперечному розрізі по лінії 10-10 відомого з техніки цільного провідного ролика, проілюстрованого на фіг. 10, на фіг. 12 показаний частковий вид у поперечному розрізі одного із прикладів колеса в контакті із провідним роликом відповідно до приклада, проілюстрованого на фіг. 11; на фіг. 13 показаний вид у поперечному розрізі одного із прикладів здійснення рознімного провідного ролика, на фіг. 14 показана ортогональна проекція рознімного провідного ролика, проілюстрованого на фіг. 13, на фіг. 15 показаний частковий вид у поперечному розрізі другого прикладу здійснення рознімного провідного ролика, на фіг. 16 показана ортогональна бічна проекція циліндричного елемента відповідно до другого прикладу здійснення, проілюстрованого на фіг. 15, на фіг. 17 показана ортогональна вертикальна проекція циліндричного елемента, проілюстрованого на фіг. 16, на фіг. 18 показана ортогональна бічна проекція кільцевого відрізка відповідно до другого прикладу здійснення, проілюстрованого на фіг. 15, і на фіг. 19 показана ортогональна вертикальна проекція кільцевого відрізка, проілюстрованого на фіг. 18. Відомості, що підтверджують можливість здійснення винаходу Хоча в описі мова йде про дефектоскопію коліс залізничних вагонів, мається на увазі, що описані пристрій та способи також застосовні для дефектоскопії інших литих і кутих коліс, використовуваних у різних галузях промисловості, не пов'язаних із залізничною галуззю. Відповідно, опис запропонованих у винаході способу та пристрою відносно коліс залізничних вагонів служить лише цілям зручності. Пристрій для ультразвукової дефектоскопії колеса залізничного вагона. На виді в поперечному вертикальному розрізі на фіг. 1 і бічній проекції на фіг. 2 проілюстрований один з варіантів здійснення пристрою для ультразвукової дефектоскопії. Пристрій для ультразвукової дефектоскопії призначено для неруйнівного контролю та відображення підповерхневої структури колеса 100 залізничного вагона, один із прикладів якого проілюстрований на фіг. 9. В одному з варіантів здійснення пристрій для ультразвукової дефектоскопії містить випробувальну арматуру 11 ультразвукової дефектоскопії для захоплення і обертання колеса та ультразвуковий датчик 90 у зборі. Крім того, у деяких варіантах здійснення може використовуватися ЦП (наприклад, програмувальний логічний контролер (ПЛК)) (не показаний) для координування операцій збору даних ультразвуковим датчиком 90 у зборі і функцій маніпулювання, переміщення та приведення в дію колеса, що виконуються випробувальною арматурою 11 ультразвукової дефектоскопії. Пристрій 10 для ультразвукової дефектоскопії може мати безліч різних варіантів здійснення, у які входять додаткові вузли у різних комбінаціях. Наприклад, ступінь автоматизації маніпулювання випробовуваним зразком колеса залізничного вагона впливає на число і тип вузлів, необхідних у пристрої для дефектоскопії. В одному з варіантів здійснення пристрій 10 для дефектоскопії може містити кілька необов'язкових вузлів для встановлення випробовуваного зразка в задане положення і його обертання у випробувальній арматурі 11 дефектоскопії. В одному з варіантів здійснення ці вузли включають транспортний вузол 50, завантажувальний вузол 60, утримуючий вузол 120 і обмежувальний вузол 70 крім вузла 80 привода для обертання випробовуваного зразка. Кожен вузол встановлений на рамі 12 у зборі або в цьому варіанті здійснення взаємодіє з рамою 12 у зборі та з баком 22 для контактного текучого середовища. Як зазначено вище, для збору даних ультразвукової дефектоскопії потрібні не всі перераховані вузли. Наприклад, в іншому варіанті здійснення колесо 100 встановлюють на вузол 80 привода за допомогою ручного пристрою, такого як крюковий кран (не показаний). У результаті, у цьому варіанті здійснення не потрібні вузли транспортування і маніпулювання, і замість них у випробувальній арматурі 11 дефектоскопії необхідна тільки рама 12 у зборі, бак 22 і вузол 80 привода. Відповідно, в одному з варіантів здійснення пристрій 10 для дефектоскопії може містити тільки раму 12 у зборі, вузол 80 привода для обертання колеса, бак 22 для занурення колеса в контактне текуче середовище і датчик 90 у зборі для збору даних ультразвукової дефектоскопії. 2 UA 102788 C2 5 10 15 20 25 30 35 40 45 50 55 60 В інших варіантах здійснення пристрій 10 для ультразвукової дефектоскопії може містити інші сполучення вузлів. Наприклад, бак 22 не потрібний у варіантах здійснення, у яких використовують інші засоби для забезпечення контакту ультразвукового перетворювача з колесом (наприклад, за рахунок прямого контакту перетворювача замість контакту шляхом занурення). Як показано на фіг. 1, в одному з варіантів здійснення пристрій 10 для ультразвукової дефектоскопії має автоматизовану систему збору даних ультразвукової дефектоскопії. Пристрій 10 для ультразвукової дефектоскопії, проілюстрований на фіг. 1, має раму 12 у зборі з вертикальними опорами 14, 16, 18 і 20, прикріпленими до підлоги 17. На верхніх кінцях 15 опор 14, 16, 18 і 20 встановлений бак 22 для контактного текучого середовища 155. В одному з варіантів здійснення бак 22 має прямокутну форму, як показано на фіг. 1 і 2. Бак 22 має нижню стінку 23, передню бічну стінку 25 (показану на фіг. 2), задню бічну стінку 27, першу торцеву стінку 29 і другу торцеву стінку 31. Передня бічна стінка 25, задня бічна стінка 27, перша торцева стінка 29 і друга торцева стінка 31 утворюють верхню грань 33 і обмежують простір 35. Кожна бічна стінка 25, 27 і торцева стінка 29, 31 бака 22 має нижній фланець 37 і верхній фланець 39. По кутах 41 пристрою 10 для ультразвукової дефектоскопії розташовані вертикальні тяги 24, 26, 28 і 30, що відходять вертикально вгору від бака 22 і верхніх фланців 39. Вертикальні тяги 24, 26, 28 і 30 з'єднані горизонтальними поперечними зв'язками 36 і 38 на верхніх кінцях 40 рами 12 у зборі. Хоча колеса залізничних вагонів мають в цілому просту конструкцію, вони можуть вироблятися відповідно до різних стандартів з різними розмірами й допусками. Наприклад, на фіг. 9 проілюстроване стандартне колесо 100 залізничного вагона, що застосовують в пристрої для ультразвукової дефектоскопії. Колесо 100 залізничного вагона має реборду 102, поверхню 104 реборди, поверхню 106 ободу, внутрішню бічну поверхню 108 обода й маточину 110 з віссю 112. На фіг. 1 пунктирною лінією показане колесо 100 залізничного вагона двох різних розмірів з метою відображення загального положення колеса в пристрої 10 для ультразвукової дефектоскопії. В одному з варіантів здійснення ультразвукова дефектоскопія колеса залізничного вагона починається з того, що колесо 100 за допомогою своєї поверхні 106 обода в цілому вертикально вкочують по напрямному пристрою з рейковими напрямними (не показані) всередину рами 12 у зборі зліва направо. Колесо 100 переміщують по згаданому напрямному пристрою з рейковими напрямними у переважно центральне положення всередині рами 12 у зборі над баком 22 і між вертикальними тягами 24, 26, 28 і 30, щоб привести колесо у контакт із транспортним вузлом 50. По мірі того, як колесо 100 вкочується на місце, датчики (не показані) передають сигнал, що вказує положення колеса 100. Коли колесо досягає заданого положення в пристрої 10 для дефектоскопії, приводиться в дію утримуючий вузол 120, який зупиняє колесо над першим і другим рольгангами 140, 142 завантажувального вузла 60. Утримуючий вузол На фіг. 6 і 7 показаний утримуючий вузол 120. Утримуючий вузол 120 підтримує колесо 100 у поперечному положенні на напрямному пристрої під час дефектоскопії. Наприклад, в одному з варіантів здійснення пневматичні циліндри переміщують утримуючі ролики 251, що перебувають у кожному із двох роздільних підвузлів, що утворюють утримуючий вузол 120, у напрямку як переднього, так і заднього ходу колеса по напрямному пристрої, щоб захопити колесо збоку. Утримуючий вузол 120 містить два роздільних, але в цілому ідентичних механічних підвузли для блокування колеса з кожної сторони: перший і другий утримуючі роликові підвузли 220, 230. Другий утримуючий роликовий підвузол 230, який розташований поруч із першим утримуючим роликовим підвузлом 220, дзеркально відображає дію першого утримуючого роликового підвузла 220. У цьому варіанті здійснення всі компоненти першого утримуючого роликового підвузла 220 також присутні у другому утримуючому роликовому підвузлі 230 і діють у такий же спосіб. Відповідно, опис і дія утримуючого роликового підвузла 220 в цілому застосовна до другого утримуючого роликового підвузла 230. Далі описана дія одного з двох утримуючих роликових підвузлів утримуючого вузла 120. Перший утримуючий роликовий підвузол 220 містить перший пневматичний утримуючий циліндр 222, шарнірно з'єднаний з вертикальною тягою 26 за допомогою скоби 224 і першого штифта 226 на верхньому кінці 228 циліндра і першого тримача 229 з вушком. З нижнього кінця 234 пневматичного утримуючого циліндра 222 висувається стрижень 232 зворотнопоступального ходу. Розташована у другому отворі 246 втулка 250 має поворотну консоль 236, 3 UA 102788 C2 5 10 15 20 25 30 35 40 45 50 55 60 що з'єднана з далеким кінцем 233 стрижня 232 зворотно-поступального ходу другою скобою 240, що охоплює, і другим штифтом 242. Це з'єднання забезпечує обертання поворотної консолі 236 на першій осі 244 повороту (що проходить крізь другий отвір 246) за допомогою стрижня 232 зворотно-поступального ходу. До першого кінця 249 стопорного важеля 248 прикріплена втулка 250, до другого кінця 253 стопорного важеля прикріплений утримуючий ролик 251, встановлений на штифті 252. Зворотно-поступальний рух стрижня 232 надає обертання втулці 250 і стопорному важелю 248, в результаті чого утримуючий ролик 251 встановлюється в положення поблизу колеса 100 і захоплює колесо 100 в одному напрямку руху по напрямному пристрої. У процесі роботи перший і другий утримуючі роликові підвузли 220, 230 шляхом спільної дії за допомогою утримуючих роликів 251 з кожної сторони колеса блокують поперечне переміщення колеса 100 по напрямному пристрою всередині пристрою 10 для ультразвукової дефектоскопії. Утримуючі роликові підвузли 220, 230 автоматично сполучають колесо 100 у випробувальній арматурі 11 дефектоскопії з підвузлом траверси при підготовці до переміщення колеса в завантажувальний вузол. Транспортний вузол Спочатку колесо 100 потрапляє на транспортний вузол 50, більш точно, на консолі 125, 127, що йдуть вниз, і другий штифт 126 підвузла 130 траверси. Коли колесо 100 утримується на місці утримуючим вузлом 120, підвузол 130 траверси транспортного вузла 50 переміщає колесо 100 у завантажувальний вузол 60. Далі більш докладно описана дія транспортного вузла 50 і його складових частин відповідно до одного з варіантів здійснення. Проілюстрований на фіг. 1 і 2 транспортний вузол 50 має першу вертикальну опору 131 і другу вертикальну опору 132, що відходять вниз від горизонтального зв'язку 38. На задній бічній стінці 27 встановлені кутові скоби 133, 134, що йдуть угору, з'єднані з вертикальними опорами 131, 132, відповідно. На зовнішніх поверхнях кутових дужок 133, 134 (відповідно) розташовані кріпильні зв'язки 135 і 136 із затискними болтами 137, що проходять через зв'язки, скоби, і опори 131-136. Через зв'язки 135, 136 і кутові скоби 133, 134 з першою і другою консолями 125 і 127, що проходять вниз, відповідно, проходить поперечний штифт 138. Між консолями 125 й 127, що проходять вниз, проходить другий штифт 126. Показаний на фіг. 1 і 2 транспортний вузол 50 має пневматичний передатний циліндр 340, верхній кінець 346 якого закріплений тримачем 342 з вушком скоби 344. Тримач 342 з вушком встановлений на першій і другий вертикальних опорах 131 і 132. Перший кінець 349 сполучного важеля 348 шарнірно з'єднаний тягою 350 передачі зусиль на нижньому кінці 352 пневматичного передатного циліндра 340 і з можливістю передачі привідного зусилля з'єднаний з поперечним штифтом 138 на нижньому кінці 354 сполучного важеля 348. Після того, як колесо встановлене в положенні на підвузлі 130 траверси, приводиться в дію пневматичний передатний циліндр 340, що обертає підвузол 130 траверси. Це відбувається за рахунок витягування тяги 350 передачі зусиль пневматичним передатним циліндром 340, обертання сполучного важеля 348 і поперечного штифта 138, внаслідок чого консолі 125 й 127, що йдуть вниз, обертаються навколо осі 139 штифта, і тим самим колесо 100 встановлюється на завантажувальний вузол 60 або вилучається із завантажувального вузла 60. У результаті, колесо 100 встановлюється на першому й другому рольгангах 140, 142 завантажувального вузла 60. Завантажувальний вузол Після того, як транспортний вузол 50 встановив колесо 100 у контакті з першим і другим рольгангами 140, 142, завантажувальний вузол 60 опускає колесо 100, щоб привести у контакт із провідними роликами 150, 152 вузла 80 привода. Рольганги завантажувального вузла 60 є частиною двох окремих і незалежних підвузлів, що утворюють завантажувальний вузол 60. Ці два підвузли є в цілому ідентичними з погляду конструкції та дії і розташовані поруч із кожної сторони колеса у випробувальній арматурі 11 дефектоскопії. Оскільки обидва рольганги 140, 142 діють однаково за принципом дзеркального відображення, далі буде описана тільки конструкція і дія рольганга 140. На фіг. 1 проілюстрований один з варіантів здійснення завантажувального вузла 60. У цьому варіанті здійснення колесо спирається на завантажувальні ролики 145, 146 в обох рольгангах 140 й 142. Рольганги 140, 142 розташовані впритул і рівною мірою підтримують колесо 100, що розміщується по центру над ними. Рольганги 140, 142 повертаються вниз по дузі, у результаті чого колесо 100 опускається між ними на провідні ролики вузла 80 привода. Рольганг 140 приводиться в дію пневматичним силовим циліндром 300. Пневматичний силовий циліндр 300 шарнірно з'єднаний з вертикальною тягою 24 скобою 302 і штифтом 304 на верхньому кінці 306 циліндра й тримачем 308 з вушком. З нижнього кінця 312 пневматичного 4 UA 102788 C2 5 10 15 20 25 30 35 40 45 50 55 60 силового циліндра 300 висувається дальній кінець 314 стрижня 310 зворотно-поступального ходу, який з'єднаний з кінцем 322 поворотної консолі 316 втулкою 320 і штифтом 324. Другий кінець 319 поворотної консолі 316 прикріплений до другого кінця втулки 318 на першій осі 244 повороту. Показаний на фіг. 1 перший рольганг 140 має консоль 144 з першим завантажувальним роликом 145 і другим завантажувальним роликом 146 на його дальньому кінці 147. Консоль 144 також прикріплена до першої осі 244 повороту і здатна обертатися за рахунок переміщення поворотної консолі 316 і сполучати завантажувальні ролики 145, 146 з напрямним пристроєм (не показано) для прийому колеса 100. Аналогічним чином, другий рольганг 142 має другий комплект завантажувальних роликів 145, 146 для прийому і переміщення колеса 100 всередину або із пристрою 10 для ультразвукової дефектоскопії. Як зазначено вище, оскільки другий рольганг 142 розташований поруч із першим рольгангом 140, напрямок обертання хитного вала і поворот різних компонентів дзеркально відображають напрямок переміщення компонентів рольганга 140. За допомогою завантажувального вузла 60 перший та другий завантажувальні ролики 145, 146 рольгангів 140 й 142 опускають колесо 100 на провідні ролики 150, 152 (див. фіг. 6) вузла 80 привода. Після цього рольганги 140, 142 і відсуваються й виходять із контакту з колесом 100. Рольганги 140, 142 відкочуються від колеса 100 за рахунок висування стрижнів 310 з пневматичних силових циліндрів 300, які відсувають поворотні консолі 316 на першій осі 244 повороту від колеса. Вертикальний обмежувальний вузол Крім обмеження поперечного переміщення колеса 100 у пристрої 10 для дефектоскопії в деяких варіантах здійснення також бажано підтримувати верхню частину колеса 100, щоб уникнути утворення перекидаючого моменту. Цю функцію виконує вертикальний обмежувальний вузол 70. Як показано на фіг. 2, після переміщення колеса 100 у завантажувальний вузол 60, вертикальний обмежувальний вузол 70 готовий захопити верх колеса 100 у поглибленні 362 обмежувального ролика 360. Обмежувальний ролик 360 встановлений на далекому кінці 364 стрижня 366 і переміщається на місце на верхньому кінці колеса 100 у рамі 12 у зборі за рахунок висування стрижня 366 з пневматичного обмежувального циліндра 370. Пневматичний обмежувальний циліндр 370 встановлений у цілому між поперечними зв'язками 32, 34, 36-38 на верхньому кінці 40 рами 12 у зборі. Поглиблення 362 обмежувального ролика 360 захоплює верх колеса 100 всередині рами 12 у зборі, утримуючи колесо у вертикальному положенні під час циклу тестування. Тепер у цьому варіанті здійснення колесо 100 зафіксоване як у вертикальному напрямку, так і поперечному напрямку (на напрямному пристрої). Коли колесо 100 перебуває у контакті з першим та другим провідними роликами 150, 152, вузол 80 привода здатний обертати провідні ролики 150, 152 і у свою чергу обертати колесо 100. Вузол привода Як показано на фіг. 2 і 6, вузол 80 привода містить перший і другий ведучі ролики 150, 152,які в одному з варіантів здійснення розташовані в баку 22 нижче рівня 154 контактного текучого середовища 155. На кожній окружності першого провідного ролика 150 і другого провідного ролика 152 є дугасте поглиблення 190, 192, відповідно. Поглиблення 190, 192 першого провідного ролика 150 і другого провідного ролика 152 сполучені і захоплюють частину реборди колеса 100 під час тестування. Поглиблення 190, 192 входять у контакт з ребордою 102 колеса і обертають колесо 100. Перший провідний ролик 150 встановлений на першому кінці 156 першого провідного вала 158. Перший провідний вал 158 проходить крізь перший отвір 160 і перше ущільнення 162 у задній бічній стінці 27 бака 22 і крізь перший і другий опорні підшипники 164, 166, відповідно. Перший і другий опорні підшипники 164, 166 встановлені на опорній плиті 168, що прикріплена до рами 12 у зборі. Показано, що до першого провідного вала 158 прикріплена перша ведена зірочка 170, встановлена на другому кінці 172 першого провідного вала 158. Поруч із першим провідним роликом 150 розташований другий провідний ролик 152, встановлений на першому кінці 180 другого провідного вала 174. Як показано на фіг. 6, другий провідний вал 174 проходить у цілому паралельно першому провідному валу 158 через другий отвір 176 і ущільнення 178 у баку 22. Другий провідний вал 174 проходить далі через третій і четвертий опорні підшипники 182 й 184, відповідно. Третій і четвертий опорні підшипники 182 і 184 встановлені на опорній плиті 168. Показано, що до другого провідного вала 174 прикріплена ведена зірочка 186 (показана на фіг. 1), встановлена на другому кінці 188 другого провідного вала. 5 UA 102788 C2 5 10 15 20 25 30 35 40 45 50 55 60 Як показано на фіг. 1, вузол 80 привода також містить провідний ланцюг 198, що проходить між першою веденою зірочкою 170 і провідною зірочкою 200. Провідна зірочка 200 прикріплена до вала 202 двигуна, що проходить від привідного електродвигуна 204. Аналогічним чином, між провідною зірочкою 200 і другою веденою зірочкою 186 проходить другий провідний ланцюг 206. Колесу 100 може надаватися обертання шляхом надання обертання кожній із двох або обом зірочкам, що включають першу ведену зірочку 170 і другу ведену зірочку 186, за допомогою привідного електродвигуна 204, що обертає провідну зірочку 200 і з'єднує провідні ланцюги 198, 206. В одному з альтернативних варіантів здійснення може використовуватися другий привідний електродвигун (не показаний) з окремою провідною зірочкою (не показана) для незалежного з'єднання із другою веденою зірочкою 186. Можуть також використовуватися приводи інших типів, включаючи, наприклад, ремені та шківи, і зубчасті приводи. Як альтернатива, в іншому варіанті здійснення друга ведена зірочка 186 і другий провідний вал 174 можуть діяти як непривідний ролик або ролик без прямого з'єднання із привідним електродвигуном, при цьому другий ролик 152 використовується як непривідний ролик тільки як опора колеса. Розглянемо фіг. 10, на якій показана ортогональна проекція одного із прикладів відомого з техніки провідного ролика 150, що має безліч кріпильних отворів 151 для вала. Кріпильні отвори сполучені з отворами у ведучому валу (не показаний), які в цьому варіанті здійснення дозволяють кріпити провідний ролик 150 до провідного вала за допомогою різьбових з'єднань (не показані). На фіг. 11 показаний вид у поперечному розрізі провідного ролика 150, проілюстрованого на фіг. 10. По окружності провідного ролика 150 виконане поглиблення 190 для захоплення реборди. У варіанті здійснення, проілюстрованому на фіг. 10 і 11, ведучий ролик 150 показаний як єдиний компонент. На фіг. 12 показано колеса 100 у контакті з поглибленням 190 провідного ролика 150. Провідний ролик 150 надає колесу 100 обертовий рух за допомогою фрикційної взаємодії між поглибленням 190 провідного ролика 150 і ребордою 102 колеса, захопленої поглибленням. Ця фрикційна посадка і ККД пристрою 10 для ультразвукової дефектоскопії в цілому у більшому ступені залежать від розмірних допусків колеса 100. На практиці значні коливання розмірних допусків колеса 100, особливо, при високих частотах обертання можуть створювати динамічну нестійкість, у результаті чого колесо 100 виходить з поглиблень у провідних роликах. У результаті нестійкості обертового руху, створюваного нерівномірним рухом колеса, погіршується точність збору даних. Для послаблення коливань і динамічної нестійкості внаслідок розмірних допусків колеса запропоновані нові провідні ролики згідно з альтернативним варіантом здійснення, який описаний далі. На фіг. 13 показаний вид у поперечному розрізі одного з прикладів здійснення нового провідного ролика (іменованого далі рознімним провідним роликом 500). В одному з варіантів здійснення рознімний провідний ролик 500 має два кільцевих відрізки: перший кільцевий відрізок 510, прикріплений до вала, і другий кільцевий відрізок 520, здатний переміщатися в осьовому напрямку відносно першого кільцевого відрізка. Перші і другий кільцеві відрізки 510, 520 у зібраному виді разом утворять єдиний рознімний провідний ролик 500. У цьому варіанті здійснення по окружності рознімного провідного ролика 500 між першим і другим кільцевими відрізками 510, 520 виконане поглиблення 291. У цьому варіанті здійснення від другого кільцевого відрізка 520 у бік першого кільцевого відрізка 510 відходить кільцевий виступ 522, що підтримує мінімальний розмір зазору в поглибленні 190. Як альтернатива, в іншому варіанті здійснення виступ може перебувати на першому кільцевому відрізку 510, що проходить убік другого кільцевого відрізка 520. Кільцевий виступ 522 не обов'язковий у всіх варіантах здійснення. Перший кільцевий відрізок 510 має внутрішню окружність, що примикає до провідного вала. У цьому варіанті здійснення перший кільцевий відрізок 510 проходить в осьовому напрямку назовні і утворює у цілому циліндричний відрізок 515. Далекий кінець (зовнішній кінець) циліндричного відрізка проходить по радіусі всередину і утворює торцеву пробку 516, що переважно закриває циліндр з одного кінця. Торцева пробка 516 має безліч кріпильних отворів 532 для вала, які проходять через перший кільцевий відрізок 510 і у які входять кріпильні елементи 533 для кріплення першого кільцевого відрізка 510 до провідного вала 158. У цьому варіанті здійснення другий кільцевий відрізок 520 має внутрішню окружність, яка перебуває в контакті із зовнішньою окружністю циліндричного відрізка 515 першого кільцевого відрізка 510. Це дозволяє другому кільцевому відрізку 520 сковзати по першому кільцевому відрізку 510 за рахунок того, що пружний елемент 540 (наприклад, спіральна пружина або 6 UA 102788 C2 5 10 15 20 25 30 35 40 45 50 55 60 тарілчаста пружина або гумова втулка) змушує другий кільцевий відрізок 520 переміщатися убік першого кільцевого відрізка 510. В іншому варіанті здійснення внутрішня циліндрична поверхня другого кільцевого відрізка 520 і виступ 522 можуть бути прикріплені на шліцах до зовнішньої циліндричної поверхні циліндричного відрізка 515 упродовж їх поверхонь контакту (шліци не показані). Шліци дозволяють другому кільцевому відрізку 520 сковзати в осьовому напрямку відносно циліндричного відрізка 515. Крім того, шліци забезпечують прямий шлях передачі потужності від першого кільцевого відрізка 510 другому кільцевому відрізку 520 при обертанні провідного вала. Крім кріпильних отворів 532 для вала в одному з варіантів здійснення рознімний провідний ролик 500 має комбінований кріпильний отвір 512, що проходить повністю через перший і другий кільцеві відрізки 510, 520. Як показано на фіг. 13, перший і другий кільцеві відрізки 510, 520 утримуються разом із кріпильними елементами 530 (наприклад, гвинтами з голівкою, шпильками або іншими застосовними елементами), що проходять через паралельні в осьовому напрямку кріпильні отвори 512 (які включають перший отвір 511 і другий отвір 521). В одному з варіантів здійснення перший кільцевий відрізок 510 має безліч перших отворів 511, які в одному з варіантів здійснення є різьбовими і з якими входить у контакт кріпильний елемент 530. В одному з варіантів здійснення другий кільцевий відрізок 520 має безліч других отворів 521, які проходять через другий кільцевий відрізок 520 і при концентричному сполученні з першими отворами 511 у першому кільцевому відрізку 510 утворюють комбінований кріпильний отвір 512, що проходить в осьовому напрямку через рознімний провідний ролик 500. Кріпильний елемент 530 проходить крізь кріпильний отвір 512, а в одному з варіантів здійснення утримується голівкою 531 на одному кінці і гайкою 550 (наприклад, стопорною гайкою) на дальньому кінці. В іншому варіанті здійснення замість першого отвору в першому кільцевому відрізку до першого кільцевого відрізка може бути прикріплена різьбова шпилька (не показана), різьбовий кінець якої проходить крізь другий отвір. До різьбового кінця шпильки може бути прикріплена стопорна гайка для з'єднання першого і другого кільцевих відрізків. В іншому варіанті здійснення для кріплення першого кільцевого відрізка 510 до провідного вала 158 не потрібен циліндричний відрізок 515 або торцева пробка 516. Замість цього в цьому варіанті здійснення перший кільцевий відрізок 510 може бути безпосередньо прикріплений до провідного вала, наприклад, шляхом пресової або тугої посадки. Відповідно, другий кільцевий відрізок 520 може ковзати безпосередньо по провідному валу, а не по першому кільцевому відрізку 510, як у попередньому варіанті здійснення. У ще одному варіанті здійснення перший кільцевий відрізок 510 може знаходитись із зовнішньої сторони другого кільцевого відрізка 520 на провідному валу, а не із внутрішньої сторони, як проілюстровано на фіг. 13. У цьому варіанті здійснення другий кільцевий відрізок 520 знаходиться із внутрішньої сторони першого кільцевого відрізка 510 і відхиляється в осьовому напрямку всередину відносно першого кільцевого відрізка 510, у результаті чого утворюється більше поглиблення 190. У цьому варіанті здійснення із внутрішньої сторони другого кільцевого відрізка 520 розташований пружний елемент, що забезпечує в осьовому напрямку назовні зворотне зусилля убік першого кільцевого відрізка 510. В одному з варіантів здійснення із зовнішньої сторони другого кільцевого відрізка 520 розташований пружний елемент 540 (наприклад, спіральна пружина або тарілчаста пружина, як проілюстровано на фіг. 14), зафіксований між головкою 531 і зовнішнім кінцем другого кільцевого відрізка 520. В іншому варіанті здійснення кріпильний елемент може бути перевернутий, за рахунок чого пружний елемент може бути зафіксований між гайкою 550 і другим кільцевим відрізком 520. Гайка 550 може регулюватися, щоб створювати бажане зусилля стиску пружини між першим і другим кільцевими відрізками 510, 520. Затискне зусилля, що прикладається другим кільцевим відрізком 520, а також в одному з варіантів здійснення ковзна посадка між другим кільцевим відрізком і зафіксованим першим кільцевим відрізком 510 створюють поглиблення з регульованим простором. За рахунок мінливості розмірів поглиблення рознімний провідний ролик 500 здатний пристосовуватися до змін товщини реборди колеса в міру того, як другий кільцевий відрізок 520 рознімного провідного ролика 500 ковзає в осьовому напрямку відносно першого кільцевого відрізка 510. У результаті, у цьому варіанті здійснення рознімний провідний ролик 500 має поглиблення 291 з регульованим простором, розраховане на зміни розмірів колеса і яке запобігає або послабляє динамічну нестійкість і коливання колеса, які мали б місце в іншому випадку в результаті виходу реборди колеса з поглиблення. Наприклад, в одному з варіантів здійснення у випадку збільшення товщини колеса на окремих ділянках реборди другий кільцевий відрізок 520 рознімного провідного ролика 500 може зміщатися в осьовому напрямку назовні убік зовнішнього кінця провідного вала (на якому 7 UA 102788 C2 5 10 15 20 25 30 35 40 45 50 55 60 встановлений рознімний провідний ролик), щоб пристосуватися до збільшення товщини. За рахунок цього пристосування рознімного провідного ролика 500 до мінливості розмірів колеса підвищується обертальна стійкість колеса, і воно може рівномірно котитися по поглибленню, перебуваючи на однаковій глибині по радіусі, послабляються коливання й нестійкість, які мали б місце в іншому випадку в результаті виходу колеса з поглиблення відомого з техніки провідного ролика. Як альтернатива, якщо товщина реборди колеса зменшується, другий кільцевий відрізок 520 рознімного провідного ролика 500 може зміщатися в осьовому напрямку всередину у бік внутрішнього кінця провідного вала (на якому встановлений рознімний провідний ролик). За рахунок цього поглиблення другого кільцевого відрізка залишається в контакті з ребордою колеса і забезпечує колесо рушійною силою. В одному з варіантів здійснення пружним елементом у рознімному провідному ролику 500 є тарілчасті пружини. У декількох різних конфігураціях тарілчасті пружини можуть бути поміщені на кріпильні елементи 530 або над ними. Наприклад, розмір і кількість тарілчастих пружин можуть бути адаптовані до: 1) розміру колеса залізничного вагона, 2) розмірним допускам колеса і 3) кількості кріпильних елементів, що утримують разом рознімний ведучий ролик. Крім того, для досягнення бажаної жорсткості пружини, тарілчасті пружини можуть бути згруповані в стакані або на піддоні (або мати будь-яку іншу геометричну конфігурацію). В іншому варіанті здійснення замість тарілчастих пружин можуть використовуватися спіральні пружини (не показані) для додання стискаючого зусилля до першого і другого кільцевих відрізків 510, 520 рознімного провідного ролика 500. В одному з варіантів здійснення спіральні пружини знаходяться по центрі кріпильних елементів 530 між головкою і зовнішнім кінцем другого кільцевого відрізка 520. В іншому варіанті здійснення пружний елемент може бути розташований між першими і другим кільцевими відрізками 510, 520. При виштовхуванні назовні кільцевих відрізків у пружному елементі розвивається розтяжне зусилля, що змушує зблизитися обидва кільцеві відрізки. Спіральні пружини також можуть використовуватися в будь-якій кількості різних конфігурацій, включаючи, наприклад, послідовні або паралельні орієнтації для досягнення бажаної твердості пружини. Крім тарілчастих пружин і спіральних пружин існують пружні елементи безлічі інших типів для примусового зближення першого і другого кільцевих відрізків 510, 520. Наприклад, у різних варіантах здійснення замість описаних вище традиційних металевих тарілчастих і спіральних пружин можуть використовуватися гумові втулки та гумові пружини, сконструйовані із цілого ряду різних еластомерів. Хоча пружини з еластомерних матеріалів зазвичай мають меншу твердість, ніж традиційні металеві пружини, вони забезпечують відмінну амортизацію вібрації. В одному з варіантів здійснення гумові пружини і втулки розміщуються навколо кріпильних елементів для збереження стискального зусилля, що діє на реборду колеса залізничного вагона. На фіг. 15 показаний частковий вид у поперечному розрізі рознімного провідного ролика 500 відповідно до іншого варіанта здійснення. У цьому варіанті здійснення до вільного кінця провідного вала 158 прикріплений циліндричний елемент 560. Провідний ролик 500 також має кільцевий відрізок 570, які безпосередньо прилягають до циліндричного елемента 560 із внутрішньої сторони, і знаходиться в ковзному контакті із провідним валом 158. Циліндричний елемент 560 і кільцевий відрізок 570 у зібраному вигляді утворюють єдиний рознімний провідний ролик 500. У цьому варіанті здійснення між зверненим в осьовому напрямку всередину кінцем циліндричного елемента 560 і зверненим в осьовому напрямку назовні кінцем кільцевого відрізка 570 знаходиться поглиблення 190. Поглиблення щонайменше частково захоплює реборду колеса залізничного вагона (не показане). В одному з варіантів здійснення це поглиблення в цілому повторює форму реборди колеса залізничного вагона, у контакт із яким воно входить. На фіг. 16 показаний один із прикладів ортографічної бічної проекції циліндричного елемента 560. У цьому варіанті здійснення циліндричний елемент 560 має безліч отворів 564 для стопорних гвинтів, що проходять крізь циліндричний елемент. Стопорні гвинти (не показані) проходять крізь ці отвори 564 і входять у звернений в осьовому напрямку назовні кінець провідного вала (не показаний) для кріплення циліндричного елемента до провідного вала. В іншому варіанті здійснення замість використання стопорних гвинтів циліндричний елемент 560 може бути приварений до провідного вала або туго посаджений на нього. В одному з варіантів здійснення циліндричний елемент 560 має кільцевий подовжувач 562, що відходить від нього. Кільцевий подовжувач 562 входить у контакт із провідним валом і 8 UA 102788 C2 5 10 15 20 25 30 35 40 45 50 55 60 утворює щонайменше частину поглиблення, у контакт з яким входить реборда колеса залізничного вагона. У цьому варіанті здійснення крізь циліндричний елемент 560 і кільцевий подовжувач 562 проходить перший отвір 566. На фіг. 17 зображена ортогональна вертикальна проекція циліндричного елемента 560. Проілюстровані отвори 564 для стопорних гвинтів, розташовані по центру циліндричного елемента 560. Крім того, показані перші отвори 566, розташовані радіально зовні отворів 564 для стопорних гвинтів. Перші отвори 566 проходять переважно паралельно головній осі провідного вала і з'єднують циліндричний елемент 560 з кільцевим відрізком (не показаний). На фіг. 18 показана ортогональна бічна проекція кільцевого відрізка 570. У цьому варіанті здійснення внутрішня окружність 574 знаходиться в ковзному контакті із зовнішньою окружністю провідного вала (не показаний). Кільцевий відрізок 570 також має безліч других отворів 572 у кільцевому відрізку для розміщення кріпильних елементів, що з'єднують кільцевий відрізок із циліндричним елементом. На фіг. 19 показана ортогональна вертикальна проекція кільцевого відрізка 570. Проілюстровані другі отвори 572. Також проілюстрована внутрішня окружність 574, яка знаходиться в контакті з провідним валом і забезпечує ковзну посадку. В одному з варіантів здійснення внутрішня окружність 574 може бути прикріплена на шліцах до провідного вала (шліци не показані). У цьому варіанті здійснення це дозволяє провідному валу передавати потужність безпосередньо кільцевому відрізку 570, і при цьому кільцевий відрізок здатний зміщатися в осьовому напрямку уздовж провідного вала. Як показано на фіг. 15, при сполученні перших і других отворів у циліндричному елементі 560 і кільцевому відрізку 570, відповідно, утворюється комбінований кріпильний отвір 512, що проходить крізь провідний ролик 500. Крізь кріпильний отвір 512 проходить кріпильний елемент 530 (наприклад, гвинти з голівкою, шпильки, болти і т.д.), який з'єднує циліндричний елемент 560 з кільцевим відрізком 570. В одному з варіантів здійснення кріпильний елемент утримується голівкою 531 на одному його кінці і гайкою 550 (наприклад, стопорною гайкою) на іншому його кінці. В одному з варіантів здійснення кріпильний елемент знаходиться в ковзному контакті з першим отвором циліндричного елемента і прикріплений до кільцевого відрізка. В одному з варіантів здійснення між головкою 531 гвинта та циліндричним елементом 560 або, як альтернатива, між гайкою 550 кріпильного елемента та кільцевим відрізком 570 закріплений пружний елемент 540, що створює стискальне зусилля, яке діє на реборду колеса, що перебуває в контакті з поглибленням 190 рознімного провідного ролика 500. Відповідно, коли кільцевий відрізок 570 зміщається в осьовому напрямку внаслідок нерівності (тобто збільшеної товщини) реборди колеса залізничного вагона, пружний елемент 540 здатний повертати кільцевий відрізок 570, що змістився в осьовому напрямку, коли товщина реборди зменшується, і тим самим забезпечується безперервний контакт із ребордою колеса. В одному з варіантів здійснення до циліндричного елемента 560 прикріплена захисна кришка 575, що закриває кріпильні елементи і тарілчасті пружини. Ця захисна кришка 575 перешкоджає потраплянню бруду й контактного текучого середовища між тарілчастими пружинами, забезпечуючи відносно постійне зусилля пакета тарілчастих пружин. Ультразвуковий датчик у зборі На фіг. 5 проілюстрована керуюча схема 400 системи керування пристрою для ультразвукової дефектоскопії, яка в одному з варіантів здійснення включає ультразвуковий датчик 90 у зборі. В одному з варіантів здійснення ультразвуковий датчик 90 у зборі містить ультразвуковий дефектоскоп, перетворювачі й датчик положення в зборі для передачі й прийому, а також обробки ультразвукових сигналів. Ультразвукові перетворювачі Ультразвукові перетворювачі передають ультразвукові сигнали випробовуваному зразку (тобто колесу 100) і приймають відбиті ультразвукові сигнали. Відбиті ультразвукові сигнали забезпечують дані, необхідні для здійснення аналізу і виявлення дефектів елементів конструкції колеса. В одному з варіантів здійснення ультразвукового датчика 90 у зборі для відображення дефектів випробовуваного зразка можуть разом діяти два перетворювачі. Передбачений нерухомий перетворювач 414, що знаходиться у фіксованому місці розташування у безпосередній близькості від внутрішньої бічної поверхні 108 ободу колеса, як показано на фіг. 4. Іншим перетворювачем є перетворювач 416, що індексує, який переміщається відносно колеса 100 у безпосередній близькості від поверхні 106 обода. Для переміщення перетворювача 416, що індексує, відносно колеса 100 використовується датчик 402 положення в зборі, що переміщає перетворювач 416, що індексує, на фіксовані кроки при проходженні по колесу 100. Датчик положення в зборі 9 UA 102788 C2 5 10 15 20 25 30 35 40 45 50 55 60 У цьому варіанті здійснення датчик 402 положення в зборі (проілюстрований на фіг. З, 4 і 8), що рухливо закріплений на монтажній стійці 404, реєструє положення перетворювача 416, що індексує, по мірі його покрокового переміщення по колесу на окремі кроки. Датчик положення в зборі синхронізує збір даних з положенням перетворювача, що індексує, що дозволяє пристрою для ультразвукової дефектоскопії точно встановлювати місце розташування і розміри дефектів, виявлених на сканованому зображенні. Датчик 402 положення в зборі містить привідні електродвигуни 406, 408 перетворювача; контрольну панель 410; і маніпулятор 412 перетворювача. Кожний з цих компонентів датчика 402 положення в зборі більш докладно описаний далі. Привідні електродвигуни перетворювача Монтажна стійка 404, на якій закріплений датчик 402 положення в зборі, прикріплена до підлоги 17, як показано на фіг. 2 і 3. Датчик 402 положення в зборі закріплений на монтажній стійці 404 (над опорними підшипниками 164, 166, 182 і 184), а до контрольної панелі 410 у верхній частині монтажної стійки 404 прикріплений перший привідний електродвигун 406 подачі по осі X і другий привідний електродвигун 408 подачі по осі Y. У цій конфігурації перший привідний електродвигун 406 здатний переміщати контрольну панель 410 і маніпулятор 412 перетворювача в напрямку по осі X (горизонтально в площині, показаній на фіг. 4). Аналогічним чином, другий привідний електродвигун 408 здатний переміщати контрольну панель 410 у напрямку по осі Y, як показано на фіг. 3. В одному з варіантів здійснення привідними електродвигунами 406, 408 можуть бути крокові мікродвигуни. Як показано на фіг. 4, контрольна панель 410 пускає в хід маніпулятор 412 перетворювача. На далекому кінці маніпулятора 412 перетворювача знаходиться перетворювач 416, що індексує. У цьому варіанті здійснення маніпулятор 412 має в цілому Г-подібну форму і проходить униз всередину бака 22 з контактним текучим середовищем 55. Перетворювач 416, що індексує, поетапно приводиться в дію привідними електродвигунами 406, 408 за допомогою контрольної панелі 410 і маніпулятора 412. Перетворювач 416, що індексує, керований датчиком 402 положення в зборі, і нерухомий перетворювач 414, розташований поблизу колеса, дозволяють передавати й приймати ультразвукові сигнали під керуванням ультразвукового дефектоскопа. Ультразвуковий дефектоскоп Як показано на фіг. 5, в одному з варіантів здійснення ультразвуковий дефектоскоп 451 керує перетворювачами 414, 416, у тому числі частотою, напругою (або в більш загальному сенсі потужністю ультразвукового сигналу, що випускає перетворювач), частотою проходження імпульсів, вибором фільтрів і т.д. Ультразвуковий дефектоскоп 451 також приймає дані ультразвукової дефектоскопії від перетворювачів 414, 416. В одному з варіантів здійснення ультразвуковий дефектоскоп 451 також має порти уведення і виводу (наприклад, порти універсальної послідовної шини) для забезпечення можливостей зв'язку безпосередньо з персональним комп'ютером 470, який з'єднаний із принтером 480. Персональний комп'ютер 470 служить для оператора робочою станцією, що дозволяє здійснювати моніторинг збору даних, а також надає можливість здійснювати подальший аналіз зібраних даних. Персональний комп'ютер 470 може містити програмне забезпечення для обробки зібраних даних, забезпечувати функції моніторингу аварій, а також удосконалені функції візуалізації для відображення даних ультразвукової дефектоскопії. Наприклад, в одному з варіантів здійснення нерухомий перетворювач 414 по лінії 452 передає ультразвуковому дефектоскопу 451 сигнал, який по лінії 471 передається далі персональному комп'ютеру 470, що його зберігає. Аналогічним чином перетворювач 416, що індексує, по лінії 454 передає ультразвуковому дефектоскопу 451 сигнал, який по лінії 471 передається персональному комп'ютеру 470, що зберігає його для порівняння та оцінки. Керування пристроєм для ультразвукової дефектоскопії На фіг. 5 показана електрична керуюча схема, яка ілюструє роботу і керування пристроєм 10 для ультразвукової дефектоскопії відповідно до одного з варіантів здійснення. Пристрій 10 для ультразвукової дефектоскопії має ультразвуковий датчик 90 у зборі, взаємодіючий з ЦП 450, що узгоджує дію ультразвукового датчика 90 у зборі з можливостями випробувальної арматури 11 ультразвукової дефектоскопії маніпулювати колесом (шляхом керування пневматичними циліндрами). Наприклад, у деяких варіантах здійснення, ЦП 450 здатний діяти як програмовний логічний контролер (ПЛК) для передачі по лініях 456 пневматичним циліндрам випробувальної арматури 11 ультразвукової дефектоскопії керуючих сигналів доставки і переміщення колеса 100 у раму 12 і з рами 12 у зборі. Ці пневматичні циліндри є в поперечному утримуючому вузлі, вертикальному обмежувальному вузлі, транспортному вузлі та завантажувальному вузлі. ЦП 10 UA 102788 C2 5 10 15 20 25 30 35 40 45 50 55 450 керує кожним з пневматичних циліндрів у згаданих вузлах з метою встановлення колеса в заданому положенні у пристрої 10 для дефектоскопії. Кілька датчиків положення (не показані), пов'язані з ЦП 450, ініціюють відповідну послідовність маніпуляцій у ЦП 450 при первісному встановленні колеса 100 у випробувальній арматурі 11 дефектоскопії. Пристрій 10 для ультразвукової дефектоскопії керується програмами системи програмного забезпечення, виконуваними ЦП 450. Разом з тим, в інших варіантах здійснення, вузол привода може бути єдиним наявним у пристрої для ультразвукової дефектоскопії механізмом маніпулювання колесом, (тобто керування пневматичними циліндрами не потрібне). У деяких варіантах здійснення ЦП 450 всетаки необхідний для керування датчиком 402 положення в зборі, перетворювачем 416, що індексує, а також привідними електродвигунами 406, 408. Відповідно, у деяких варіантах здійснення ЦП 450 також входить в ультразвуковий датчик 90 у зборі. Крім керування пневматичними циліндрами ЦП 450 також керує роботою привідного електродвигуна 204 вузла 80 привода з метою обертання випробовуваного зразка. Після того, як випробовуваний зразок увійшов у контакт з вузлом 80 привода, в одному з варіантів здійснення ЦП 450 також може передавати по лінії 458 керуючі сигнали запуску привідного електродвигуна 204 з метою регульованого за часом обертання колеса 100 у рамі 12 у зборі. В одному з варіантів здійснення ЦП 450 також координує керування частинами ультразвукового датчика 90 у зборі, включаючи датчик положення в зборі перетворювача 416, що індексує. У цьому варіанті здійснення ЦП 450 може по лінії 460 передавати привідним електродвигунам 406 і 408 керуючі сигнали для передачі перетворювачу 416, що індексує. В інших варіантах здійснення при неавтоматизованому зборі даних ультразвукової дефектоскопії датчик 402 положення в зборі і ЦП 450 не потрібні. Сигнал нерухомого перетворювача 414 слугує точкою відліку для встановлення відносного місця розташування дефектів колеса 100, які реєструються перетворювачем 416, що індексує. В одному з варіантів здійснення сигнали перетворювача 416, що індексує, і нерухомого перетворювача 414 можуть надходити по лініях 454 і 452, відповідно і передаватися ЦП 450 по лініях 455 і 453 для сприяння керуванню випробувальною арматурою 11 дефектоскопії і відповідному маніпулюванню й переміщенню колеса. Ультразвукова дефектоскопія з фазованою антенною решіткою При бажанні може використовуватися більш сучасна апаратура для ультразвукової дефектоскопії, включаючи ультразвукову дефектоскопію з фазованою антенною решіткою. В одному з варіантів здійснення ультразвуковий дефектоскоп 451 може являти собою ультразвуковий дефектоскоп з фазованою антенною решіткою, здатний з більш високою точністю керувати ультразвуковими сигналами, що передаються і приймаються від перетворювача з фазованою антенною решіткою. В одному з варіантів здійснення ультразвуковий дефектоскоп з фазованою антенною решіткою містить генератор імпульсів/приймач (не показаний) для передачі та прийому ультразвукових сигналів і мультиплексор (не показаний) для адресації багатоелементних фазових перетворювачів (не показаний). Перетворювачі з фазованою антенною решіткою мають багатоелементну структуру, що дозволяє ультразвуковому дефектоскопу 451 окремо звертатися до конкретних елементів перетворювача і активізувати їх з метою одержання динамічно регульованої апертури з обчисленим розподілом елементів, що активуються окремо. Ці програмовні апертури модифікують для кожної області випробовуваного зразка, що цікавить, що дозволяє фокусувати ультразвукову енергію під певним кутом і на певній глибині для того, щоб довести до максимуму чіткість зорового подання цієї області випробовуваного зразка. Передавальний перетворювач з фазованою антенною решіткою (тобто передавальна апертура) і приймаючий перетворювач з фазованою антенною решіткою (тобто прийомна апертура) можуть діяти при незалежно вибраних кутах прийому і передачі на заданій фокусній відстані та формувати бажане зображення області випробовуваного зразка, що цікавить. Збір вихідних даних Вихідна установка ЦП 450 та ультразвукового дефектоскопа 451 включає проведення базових ультразвукових експериментальних вимірів еталонного колеса такого ж розміру, як випробовувані колеса. Дані вимірів еталонного колеса залізничного вагона забезпечують вихідний набір емпіричних контрольних параметрів для порівняння й оцінки даних діагностики випробовуваного зразка, зібраних за допомогою перетворювачів 414, 416. Збір даних випробовуваного зразка 11 UA 102788 C2 5 10 15 20 25 30 35 40 45 50 55 Колесо 100, що спирається на провідні ролики 150, 152, готове до діагностики й оцінки підповерхневої структури ободу 106 колеса. У цьому положенні колесу 100 може надаватися обертання, як зазначено вище, шляхом приведення в дію привідного електродвигуна 204. В одному з варіантів здійснення початкове відносне положення другого або такого, що індексує, перетворювача 416 задається сигналом, який вловлюється першим або нерухомим перетворювачем 414 внутрішньої бічної поверхні 108 обода, як показано на фіг. 4. Ультразвуковий дефектоскоп 451 по лінії 452 передає ЦП 450 цей сигнал відносного положення, який використовується для порівняння внутрішньої бічної поверхні 108 ободу з еталонними даними колеса з метою встановлення другого перетворювача 416 у задане положення. Положення другого або такого, що індексує, перетворювача 416 залежить від вихідних емпіричних даних еталонного колеса. Потім визначають місце розташування осьової лінії 118 поверхні 106 ободу, яка задає відстань, пройдену перетворювачем 416, що індексує, від внутрішньої бічної поверхні 108 ободу убік реборди 102 колеса. Проте, у цьому варіанті здійснення другий або такий, що індексує, перетворювач 416 зміщений від горизонталі на гострий кут "а", як показано на фіг. 4. Гострий кут "а" відповідає величині кутового зсуву поверхні 106 ободу від горизонтальної площини. Тим самим цей зсув або ухил забезпечується випробувальною арматурою дефектоскопії з метою підтримання нормального або зверненого один до одного взаємного розташування перетворювача 416, що індексує, і поверхні 106 ободу. В одному з варіантів здійснення перетворювач 416 у точці відліку зміщений від внутрішньої бічної поверхні 108 обода у бік осьової лінії 118 (див. на фіг. 2) колеса 100. Після цього провідні ролики 150, 152 надають обертання колесу 100. В одному з варіантів здійснення при обертанні колеса 100 привідний електродвигун 406 перетворювача поетапно переміщає перетворювач 416, що індексує, у бік реборди 102 колеса. Привідний електродвигун 406 перетворювача переміщає маніпулятор 412 і разом з ним перетворювач 416, що індексує. В одному з варіантів здійснення перетворювач 416 поетапно переміщається уздовж поверхні 106 ободу від внутрішньої бічної поверхні 108 ободу до реборди 102 колеса зі швидкістю приблизно 0,1905 см поперечного переміщення за оберт колеса, що забезпечує діапазон переміщення по поверхні 106 обода близько 1,7145 см. В одному з варіантів здійснення колесо 100 повертається на 9 обертів із заданою частотою обертання. Проте, число обертів колеса може змінюватися оператором з урахуванням коливань розміру колеса та інших змінних параметрів. У міру того, як перетворювач, що індексує, поетапно переміщається по колесу, через контактне текуче середовище 155 у баку 22 на поверхню 106 обода передається ультразвуковий сигнал для аналізу підповерхневої структури на наявність різних порушень безперервності або дефектів, таких як тріщини, раковини та включення. Будь-яка зі згаданих аномалій може викликати порушення безперервності, ознакою чого є присутність відбитого сигналу, виявленого перетворювачем 416, що індексує. Відбитий сигнал, який можна вподібнити відбитому сигналу радара, що забезпечує сигнал для порівняння з вихідними емпіричними даними. Якщо сигнал не вказує на здорову структуру колеса, може здійснюватися додаткова діагностика та оцінка, ремонт або бракування колеса. Якщо потужність сигналу перевищує задане значення, комп'ютер може передати сигнал тривоги або інший сигнал, що вказує на неприйнятний виріб або на необхідність повторної діагностики. В одному з варіантів здійснення описаний пристрій для дефектоскопії відстежує точне місце розташування будь-яких порушень безперервності шляхом реєстрації точки відліку на колесі. За допомогою цих даних запропонований у винаході пристрій для дефектоскопії не тільки забезпечує практичний засіб проведення комплексної діагностики поверхні обода колеса, але також методику розробки програми профілактичного технічного обслуговування з використанням бази накопичених даних ультразвукових характеристик для виявлення дефектів, що зароджуються. Крім того, запропонований у винаході пристрій для дефектоскопії дозволяє оцінювати нові колеса залізничних вагонів з метою перевірки їхньої структурної цілісності, а також перевірки ефективності процесів контролю якості, здійснюваних під час виготовлення. Хоча винахід був описаний на прикладі декількох конкретних варіантів здійснення, ці варіанти здійснення є пояснювальними, а не такими, що обмежують винахід. У кожний з цих варіантів здійснення можуть бути внесені різні модифікації та доповнення, запропоновані фахівцями в даній галузі техніки. Відповідно, винахід має бути обмежений не викладеним вище описом або конкретними варіантами здійснення, наведеними як приклади, а тільки формулою винаходу, що додається. 12 UA 102788 C2 ФОРМУЛА ВИНАХОДУ 5 10 15 20 25 30 35 40 45 50 55 60 1. Випробувальна арматура ультразвукової дефектоскопії колеса, яка містить: безліч провідних роликів, на які спирається колесо, при цьому щонайменше один з безлічі провідних роликів має: перший кільцевий відрізок, закріплений навколо провідного вала, другий кільцевий відрізок, встановлений з можливістю ковзного контакту навколо провідного вала і такий, що прилягає до першого кільцевого відрізка, у результаті чого між першим кільцевим відрізком і другим кільцевим відрізком утворюється поглибленнядля контакту з колесом, кріпильний елемент, що з'єднує перший кільцевий відрізок з другим кільцевим відрізком, причому другий кільцевий відрізок здатний переміщатися в осьовому напрямку відносно першого кільцевого відрізка, пружний елемент, який змушує другий кільцевий відрізок переміщатися у бік першого кільцевого відрізка, і привідний електродвигун, з'єднаний із провідним валом для обертання щонайменше одного з безлічі провідних роликів. 2. Випробувальна арматура ультразвукової дефектоскопії за п. 1, яка додатково містить отвір, що проходить крізь другий кільцевий відрізок, при цьому кріпильний елемент знаходиться в ковзному контакті з отвором. 3. Випробувальна арматура ультразвукової дефектоскопії за п. 1, у якій кріпильний елемент прикріплений до першого кільцевого відрізка. 4. Випробувальна арматура ультразвукової дефектоскопії за п. 1, яка додатково містить: перший отвір, який проходить крізь перший кільцевий відрізок, і другий отвір, який проходить крізь другий кільцевий відрізок, при цьому кріпильний елемент проходить крізь перший і другий отвори. 5. Випробувальна арматура ультразвукової дефектоскопії за п. 4, у якій кріпильний елемент знаходиться в ковзному контакті з другим отвором. 6. Випробувальна арматура ультразвукової дефектоскопії за п. 4, у якій перший отвір є різьбовим для контакту із кріпильним елементом. 7. Випробувальна арматура ультразвукової дефектоскопії за п. 1, яка додатково містить бак. 8. Випробувальна арматура ультразвукової дефектоскопії за п. 7, яка додатково містить раму в зборі, на якій встановлений бак, всередині якого додатково встановлено безліч провідних роликів. 9. Випробувальна арматура ультразвукової дефектоскопії за п. 7, у якій безліч провідних роликів встановлено всередині бака, у якому додатково міститься контактне текуче середовище. 10. Випробувальна арматура ультразвукової дефектоскопії за п. 8, яка додатково містить обмежувальний ролик, встановлений на рамі в зборі і який служить для вибірного контакту з колесом з метою збереження вертикальної орієнтації колеса на безлічі провідних роликів. 11. Випробувальна арматура ультразвукової дефектоскопії колеса, яка містить: безліч провідних роликів, на які спирається колесо, причому щонайменше один з безлічі провідних роликів призначений для колеса, де щонайменше один з безлічі провідних роликів має: циліндричний елемент, прикріплений до провідного вала, кільцевий відрізок, встановлений з можливістю ковзного контакту навколо провідного вала і який примикає до циліндричного елемента, у результаті чого між циліндричним елементом і кільцевим відрізком утворюється поглиблення для контакту з колесом, кріпильний елемент, який з'єднує циліндричний елемент із кільцевим відрізком, причому кільцевий відрізок здатний переміщатися в осьовому напрямку відносно циліндричного елемента, пружний елемент, що змушує кільцевий відрізок переміщатися у бік циліндричного елемента, і привідний електродвигун, з'єднаний із провідним валом для обертання щонайменше одного з безлічі провідних роликів. 12. Випробувальна арматура ультразвукової дефектоскопії за п. 11, яка додатково містить отвір, що проходить крізь циліндричний елемент, при цьому кріпильний елемент знаходиться в ковзному контакті з отвором. 13. Випробувальна арматура ультразвукової дефектоскопії за п. 11, яка додатково містить: перший отвір, що проходить крізь циліндричний елемент, і 13 UA 102788 C2 5 10 15 20 25 другий отвір, що проходить крізь кільцевий відрізок, при цьому кріпильний елемент проходить крізь перший і другий отвори. 14. Випробувальна арматура ультразвукової дефектоскопії за п. 13, у якій кріпильний елемент знаходиться в ковзному контакті з першим отвором у циліндричному елементі. 15. Випробувальна арматура ультразвукової дефектоскопії за п. 13, у якій кріпильний елемент є нерухомим відносно кільцевого відрізка. 16. Випробувальна арматура ультразвукової дефектоскопії за п. 11, яка додатково містить бак для контактного текучого середовища. 17. Випробувальна арматура ультразвукової дефектоскопії за п. 11, яка додатково містить бак для контактного текучого середовища, всередині якого встановлено безліч провідних роликів. 18. Випробувальна арматура ультразвукової дефектоскопії за п. 16, яка додатково містить раму в зборі, на якій встановлений бак, додатково всередині якого встановлено безліч провідних роликів. 19. Випробувальна арматура ультразвукової дефектоскопії за п. 18, яка додатково містить обмежувальний ролик, встановлений на рамі в зборі і який служитьдля вибірного контакту з колесом з метою збереження вертикальної орієнтації колеса на безлічі провідних роликів. 20. Спосіб ультразвукової дефектоскопії колеса, у якому: встановлюють колесо на безліч провідних роликів, щонайменше один з яких призначений для обертання колеса, при цьому щонайменше один з безлічі провідних роликів має: циліндричний елемент, прикріплений до провідного вала, і кільцевий відрізок, що примикає до циліндричного елемента, в результаті чого між циліндричним елементом і кільцевим відрізком утворюється поглиблення для контакту з колесом, при цьому кільцевий відрізок здатний зміщатися в осьовому напрямку відносно циліндричного елемента для пристосування до змін товщини колеса, підтримують за допомогою циліндричного елемента та кільцевого відрізка стискальне зусилля, що діє на колесо, при цьому кільцевий відрізок зміщається в осьовому напрямку, і за допомогою привідного електродвигуна обертають вал з метою надання обертання щонайменше одному з безлічі провідних роликів. 14 UA 102788 C2 15 UA 102788 C2 16 UA 102788 C2 17 UA 102788 C2 18 UA 102788 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 19
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and apparatus for railway wheel ultrasonic testing
Автори англійськоюOliver John R., Oliver John D.
Назва патенту російськоюСпособ и устройство для ультразвуковой дефектоскопии колес железнодорожных вагонов
Автори російськоюОливер Джон Р., Оливер Джон Д.
МПК / Мітки
МПК: F16H 55/56, G01M 17/10, G01N 29/27, G01N 29/22
Мітки: спосіб, дефектоскопії, ультразвукової, коліс, пристрій, залізничних, вагонів
Код посилання
<a href="https://ua.patents.su/21-102788-sposib-ta-pristrijj-dlya-ultrazvukovo-defektoskopi-kolis-zaliznichnikh-vagoniv.html" target="_blank" rel="follow" title="База патентів України">Спосіб та пристрій для ультразвукової дефектоскопії коліс залізничних вагонів</a>
Пристрій для вимірювання зсуву коліс залізничних вагонів
Номер патенту: 34501
Опубліковано: 15.03.2001
Автори: Лопес Гомес Хосе, Лоренте Касадо Хосе
МПК: G01B 21/20, G01B 5/20, G01B 7/28, B61K 9/00, G01B 5/24
Мітки: зсуву, пристрій, вагонів, залізничних, коліс, вимірювання
Формула / Реферат:
1. Пристрій для вимірювання зсуву коліс залізничних вагонів, який включає ковзну основу, напрямну рейку, засоби вимірювання, систему комп’ютерної обробки одержаних сигналів та їх візуального відображення на екрані монітора, який відрізняється тим, що він додатково включає рампу, яка займає зовнішню позицію відносно напрямної рейки і утворює з нею кут 45°, і сталеву плиту, а засоби вимірювання включають основу з розміщеною на ній опорною...
Спосіб нанесення металевих покриттів на поверхню кочення коліс залізничних вагонів
Номер патенту: 68688
Опубліковано: 16.08.2004
Автор: Мілянич Андрій Романович
МПК: C23C 4/12
Мітки: покриттів, залізничних, металевих, поверхню, спосіб, кочення, нанесення, коліс, вагонів
Формула / Реферат:
1. Спосіб нанесення металевих покриттів на поверхню кочення коліс залізничних вагонів, при якому метал, що наноситься на поверхню, за допомогою електродуги нагрівається до температури плавлення, який відрізняється тим, що метал у вигляді стержня періодично нагрівають, одночасно із цим безперервно пластично розм'якшують і наносять на поверхню за допомогою засобу обробки, виконаного у вигляді послідовно закріплених секцій металевого ворсу, що...
Пристрій для ультразвукової дефектоскопії листового прокату
Номер патенту: 63199
Опубліковано: 26.09.2011
Автори: Брехов Євген Володимирович, Грудський Сергій Михайлович, Єлецьких Володимир Іванович, Титаренко Олександр Іванович
МПК: G01N 29/265, G01N 29/04
Мітки: ультразвукової, листового, прокату, пристрій, дефектоскопії
Формула / Реферат:
1. Пристрій для ультразвукової дефектоскопії листового прокату, що містить імерсійну ванну, у рідині якої встановлений акустичний блок з ультразвуковими датчиками, розташованими по обох сторонах контрольованого листового прокату, та пристрій для підтримки листового прокату в імерсійній ванні, який відрізняється тим, що пристрій обладнаний візком, який розташований над імерсійною ванною з можливістю переміщення уздовж неї, а акустичний блок...
Пристрій для ультразвукової дефектоскопії гарячого прокатуваного металу
Номер патенту: 93520
Опубліковано: 25.02.2011
Автори: Штюбер Аксель, ван Хюллен Петер
МПК: G01N 29/22
Мітки: металу, гарячого, дефектоскопії, прокатуваного, ультразвукової, пристрій
Формула / Реферат:
1. Пристрій для ультразвукової дефектоскопії гарячого прокатуваного металу під час процесу прокатки в одній з декількох розташованих одна за одною прокатних клітей прокатного стана, що складається щонайменше з двох валків, які утворюють між собою проміжок і обладнані ультразвуковими пошуковими головками, розташованими так, що частини самого тіла валка служать трактом для проходження ультразвукових хвиль до прокатуваного металу, який...
Протиколивальна підвіска залізничних коліс пасажирських вагонів
Номер патенту: 80137
Опубліковано: 27.08.2007
Автори: Шабайкович Віктор Антонович, Гусєв Анатолій Павлович, Божидарник Віктор Володимирович, Григор'єва Наталія Сергіївна
Мітки: коліс, підвіска, пасажирських, залізничних, протиколивальна, вагонів
Формула / Реферат:
1. Протиколивальна підвіска залізничних коліс пасажирських вагонів, що містить раму візка з підшипниковими вузлами осей коліс, пружини підвіски коліс, заспокоювачі коливань, з'єднані через буфери з основою корпусу вагона, яка відрізняється тим, що оснащена протиколивальними уніфікованими модулями зменшення вертикальних, поперечних і поздовжніх коливань з датчиками коливальних переміщень, встановленими автономно між основою корпусу вагона та...
Попередній патент: Спосіб приготування кристалічних форм а і в ілапразолу та спосіб перетворення кристалічних форм
Наступний патент: Спосіб енерготехнологічної переробки біомаси
Випадковий патент: Спосіб очищення зернового матеріалу