Вугільний нарізний комбайн “дніпро”
Номер патенту: 33876
Опубліковано: 15.12.2003
Автори: Родіонов Іван Федорович, Яворський Василь Миколайович
Формула / Реферат
1. Вугільний нарізний комбайн, який має розташований на рамі виконавчий орган з приводом та скребковий ланцюг, який відрізняється тим, що виконавчий орган виконано у вигляді встановленої з можливістю переміщення вздовж рами, наприклад, за допомогою домкрата, каретки, на якій розташовані на горизонтальних осях декілька взаємопаралельних відбійно-бурильних коронок з приводом і має розташовані на рамі щонайменше два домкрати що надають можливість переміщення каретки у вертикальній площині.
2. Вугільний нарізний комбайн за п.1, який відрізняється тим, що кількість розташованих на каретці відбійно-бурильних коронок дорівнює чотирьом, причому дві розташовані поряд коронки мають окремий привід.
Текст
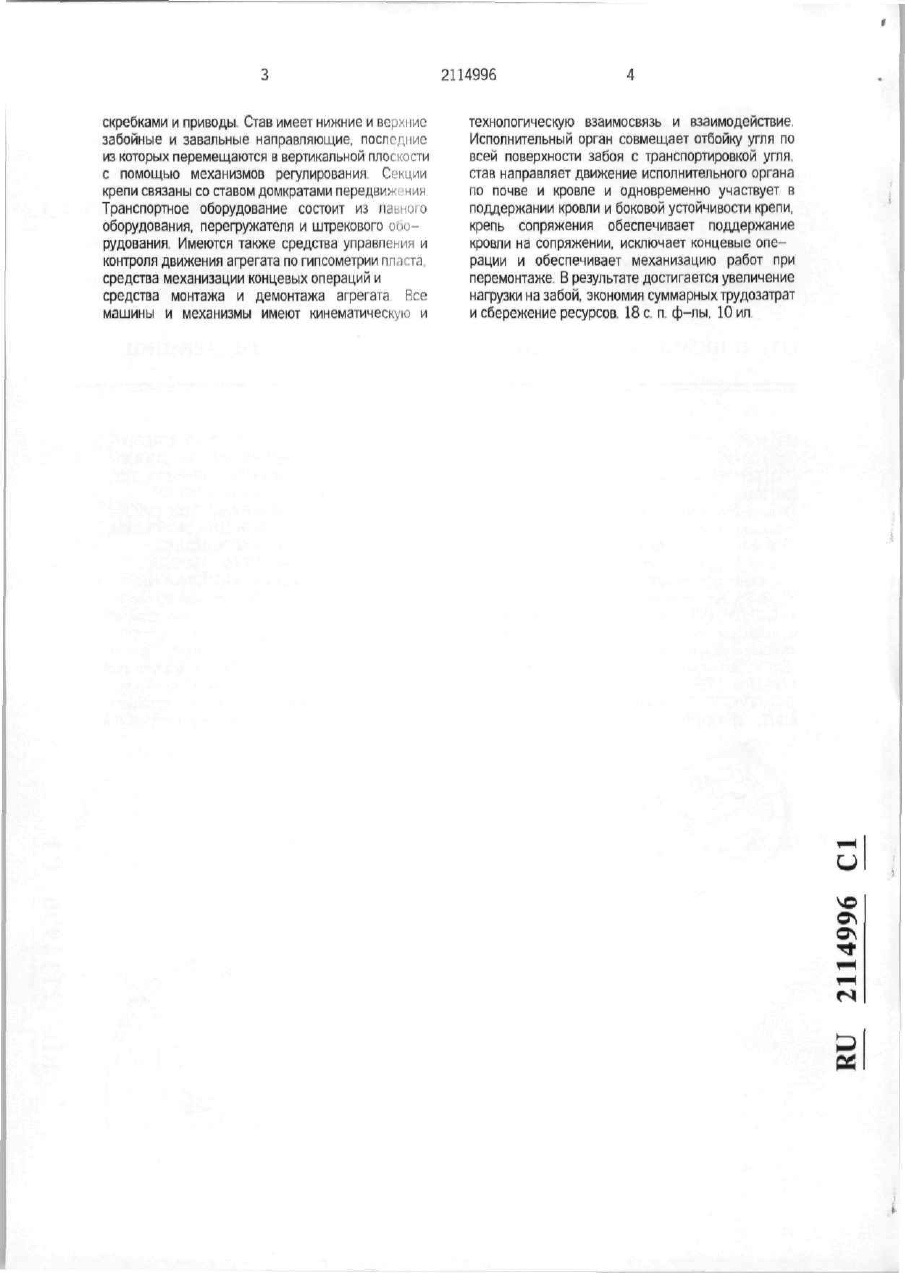
Изобретение относитсл к горной промышпенмпсти и может использоваться для подземной ра^іпботки угольных и других пластовых место рождений Фронтальный афегат нового уровня, ВКЛІП іающий кольцевой отбойный и доставочный испипнитепьный орган, имеет секции механизи рованной крепи, перегружатель, крепь сопряжения, испьинительный орган содержит цепь с резцами и и ON ON 5Л ФИГ. і 52 БЯ з скребками и приводы Став имеет нижние и верхние забойные и завальные направляющие, посподиис из которых перемещаются в вертикальной плоскости с помощью механизмов регулирования Секции крепи связаны со ставом домкратами передвижі чия Транспортное оборудование состоит из ndi шло оборудования, перегружателя и штрекового ииирудования Имеются также средства управлі^ния и контроля движения агрегата по гипсометрии пп і тл сродства механизации концевых операций и сродства монтажа и демонтажа агрегата Rre машины и механизмы имеют кинематическую и 2114996 4 технологическую взаимосвязь и взаимодействие. Исполнительный орган совмещает отбойку угля по всей поверхности забоя с транспортировкой угля, став направляет движение исполнительного органа по почве и кровле и одновременно участвует в поддержании кровли и боковой устойчивости крепи, крепь сопряжения обеспечивает поддержание кровли на сопряжении, исключает концевые опе рации и обеспечивает механизацию работ при перемонтаже В результате достигается увеличение нагрузки на забой, экономия суммарных трудозатрат и сбережение ресурсов 18 с п ф-лы, 10 ил 5 Изобретение относится к горной промышлен ности и предназначено для подземной разработки угольных и других пластовых месторождений В настоящее время преобладающей техноло гией подземной угледобычи является узкозахватная технология выемки с применением очианых комплексов оборудования Углубленный анализ этой технологии показывает, что она в значительной мере исчерпала свои возможности Представителем наиболее перспективного направления механизации добычи угли является фронтальный агрегат типа А-3 (АК-З) предназ наченный для высокоэффекгивной отбойки транспортировки угля одновременно со всей отк рытой поверхности очистного забоя, крепления и управления всеми операциями в лаве без посто янного присутствия людей в очистном забое (а с СССР N 693027, кл Е 21 D 23/00 1979) К недостаткам фронтального агрегата типа А-3 (АК-З) следует отнести нерешенную проблему транспортировки угля в длинных забоях, что связано с тем, что цепь исполнительного органа располо жена с завальной стороны транспортного желоба и вылет резцов в сторону забоя ограничен по усло виям КПД резцовой карежи, что снижает произ водительность транспорта и погрузки угля Именно это обстоятельство привело к созданию агрегата дпя крутого падения, где транспорт идет самотеком Наиболее близким аналогом для предлагаемого агрегата является фронтальный агрегат, вклю чающий кольцевой отбойно-доставочный испол нительный орган, состоящий из кольцевой цепи с резцами с скребками и приводов став с нижними и верхними забойными направляющими, секции механизированной крепи, связанные со ставом домкратами передвижения, транспортное обору дование содержащее перегружатель, равное и штрековое оборудование крепи сопряжений лавы со штреками, средства управления и контроля движения агрегата по гипсометрии пласта (журнал 'Техника молодежи" N 8, 1982, с 30-35) Недостатком аналогов типа АК-З является то обстоятельство, что на действующих участках не созданы условия реализации высокой технической производительности исполнительного органа по отбойке угля и по возможной скорости крепления кровли при фронтальной передвижке трех групп кропи кроме того, суммарная эффективность при менения агрегатной выемки требует учесть и то что монтажные работы при переходе агрегата из одной павы в другую требуют существенных трудозатрат и сопряжены с потерей производительного времени Наиболее близким аналогом исполнительного органа является исполнительный орган фрон тального агрегата содержащий цепь с резцами и скребками, концевые привода с приводными звездочками и шестернями, взаимодействующими с электроприводами {журнал 'Техника молодежи N 8 1982, с 30-35) Недостатком является ограниченность его 211499G 6 мощности вследствие того, что из-за ограничснHOCIJ пространства, требующего увеличения зоны поддержания кровли и сдвига крайних секций крепи, вес губчатые передачи редуктора выполнены недоспточного размера с применением конических пері дач из-за необходимости располагать злокіродвигатеїіи вдоль забоя при расположении 3R0 л \ы перпендикулярно забою t ірдостатком такого варианта приводной звезды явл "гся также то обстоятельство, что она не оП( иечивает разрушение забоя против концов аі[) ата, что тсхмопогически сужает возможности испі ііьзования агрегата в коротких забоях без прс нарительного проведения штреков или ниш, а ндіі чиє электропривода звезды ограничивает ее дилг етр определяемый оборотами электродвигзтр 1я и передаточным отношением редуктора Кроме того недостатком является применение элс1 гроэнергии в лаве что недопустимо в условиях вы( ки угольных пластов повышенной газо и пож^[ опасности При этом в случае нарушенных ппл 08 или при отработке межлавиых целиков пе| ленной ширимы необходимо отрабатывать без штреков и размещение концевых приводов стано ви!' I невозможным і того же источника известны резцы испол нит ihHoro органа которые расположены на резЦ011 к каретках с забойной стороны от цепи и от наіі| івляющих по которым каретки двигаются на опп| IX скольжения от одной звезды до другой, а в 301'^ звезды каретки выходят из направляющих, разі ірачиваются и по выходе со звезды снова ДО!' мы попадать на верхние направляющие одостатком является снижение КПД каретки из 1 неуравновешенности кареток с боковым пр1 іединенисм резцов скребков к тяговой цепи и из- I применения пар скопьженил, снижение надех юсти и безотказности разворота кареток и Н І можмость активной работы резцов в зоне ЄЗ З В Є ' 1Ы I Цвестен также став фронтального агрегата, кот( 1 Й включает базу с нижними и верхними Ы нап[ являющими исполнительного органа, опирак ^yюcя на почву пласта посредством забойных и ззр іьньїх лыж и передвигаемую с помощью двиrav 1ьных домкратов крепи и включает средства ргг іирования и крепления направляющих, обоспс 'I .ающие воспринятио реакций от резания угля. отГ) 1ку постоянной мощности пласта независимо от фс] 1ЧЄСК0Г0 положения перекрытий едостатком является повышенная металлоем1 ть става из за необходимости иметь тяжелые и в( ' оконагружснные передние стенки для крепІІЄНІ и верхних направляющих на нижнем ставе что соз, ієт большие изгибающие нагрузки на эти СТСІ (И от сил резания Вторым недостатком става явл>'Отся его изгибаемость по гипсометрии пласта тол о R зоне ПОЧВЫ, что требует телескопической кои рукции напржшлющих и боковой раздвижности пе[) ное оборудование, содержащее перег ружатель, павное и штрековое оборудование, крепи сопряжений лавы со штреками средства управ ления и контроля движения агрегата по гипсометрии 2114996 10 пласта, став агреіата содержит завальные напраіїллющие. имеющие возможность перемещения в ве|тикальной пікл.кости с помощью механизмов реіуііирования, нижнюю и верхнюю базы, которые СП! динены соотпртственно с основанием и переі рытием крепи посредством нижних и верхних ДВИІ ательных доі.'ікратов, работающих синхронно, ср( дства управления и контроля движения афегата по гипсометрии пімста выполнены в виде трубопропода, внутренняя полость которого заполнена жидкостью и датчиками гидростатического дав ления, рассредоточенными ло длине лавы, и ЭВМ на центральном пункте, механизм управления на каждой секции сипа выполнен в виде плунжеров, подпружиненных в поршневой полости и с питанием шт'чювой полосіи управляющим давлением от одной для всех механизмов управления линии у п раї нения, гидраи.'ическое давление в которую подается от имоюміегося на центральном пульте уіі(' явления рсгуп>|-'ора в зависимости от положения по цлине лавы по"венных резцов и в соответствии с профаммой. опро/іоленной оператором агрегата или прогнозом залегания пласта, выполненным с поиощью центральной ЭВМ, крепь сопряжения ля1ы со штреками выполнена в виде вандрутной пиг'ии, снабженной направляющими, по которым пег'смещаются самоходные тележки с маникулятором, имеющим -.эхват для извлечения и транс портировки при^аЬоиных стоек штрековой крепи, при этом привод самоходных тележек манипулятора осуществлен от ги іродвигателя большого момента, работающего от "імульсии, применяемой в гид рокрепи агрегатя для чего коммутация рабочей жидкости радиапнно-поршневой группы гидродвигзтеля осуи;ег меняется сдвоенным плоским осі'вьім золотником а став агрегата с нижними и верхними напраппя1оп(ими передвигается синхронно на ^абой путем погмедоваїельного питания нижнего и в^^рхнего домкргпов при подаче става на забой и ла[)аплельного их питания при выдвижке крепи для обс^спечения сброса ошибки при синхронной подаче всііхнего и нижн'чо става на забой, причем п е рскпючение питпі'1'Я двух домкратов с последова-ч=льной схемы їм параллельную осуществляется дв^ хходовым jono гпиком кроме того, '.ідачей изобретения является увгпичение возможной приводной мощности при вода и возможность использования серийных кон вейерных приводов со своими редакторами, тур бомуфтами и эмоктродвигателями, освоенными примышпенностыо Дпя ее решения предлагается игнолнительный орган фронтального зфегата, со'іержащий цепі, с резцами и скребками, концевые пр ,иода с приво/іні^іми звездочками и шестернями, взоимодейавующими с электроприводами, в ко торых редуктор п[Ч1вода имеет один вал со звез дочкой и одну приіюдную шестерню, работающую одновременно нс'г'чолькими, например тремя, зубьями, взаимодействующими с выходными шестернями трех ггрийных конвейерных приводов, прифланцовэчных к редуктору концентрично к оси n вала и имеющих каждый свой электродвигатели и свою турбомуфту Изобретение направлено также на обеспечение работы агрегата в коротких забоях в целиках н"ременной ширины и повышение надежности р.иворота резцовых кареток Для этого исполнительный орган фронтального афегата, содержащий цепь с резцами и скребками и концевые звездочки, имеет концевые звезди іКИ без эпекфопривода, что обеспечивает проход резцовых кареток с разрушением глухого з.ібоя круговой формы и возможность работы агрегата йез проведения вентиляционного трека, составлеииі ми креплением его за агрегатом, R том числе по т г х ноіюгической схеме с повюрным его использоиНИем без предварительного прохождения П0ДІПтовительных выработок Задачей изобретения является, кроме юго, исключение применения злсісгроприводов и o6t с печение привода от гидроэнергии, имеющей' /I в крепи, в том числе обеспечение отработки плаг та с глухим забоем на одном конце ai регата Для этого исполнительный оріан фронтального агрегата, содержащий цепь с резцами и скребімми, выполнен с приводом от гидродомкратов, распо ложенных позади верхней цепи в забойных ци линдрических направляющих и взаимодействуй пі,их с наружными пластинами цепи посредством і iворотного кулака, поджимаемого к поверхности цепи, причем коммутация домкратов производи юя клапанами, взаимодействующими с кулаком т, 'им образом, что при повороте кулака в сторону впадины цепи домкрат включается на раздвижку, а попорот кулака под действием наружной пластины копи приводит к сокращению домкрата, при злжі в первом случае усилие домкрата передаете!: на цепь, а во втором случае производится сокращі те домкрата и ожидание им подхода спсдую^^ей впадины цепи Задачей следующего изобретения из группы является повышение к п д каретки, повьішчіис надежности и безотказности разворота карстоі< на звездах при резании в круговом забое против звезды Для решения этой задачи резцы исполни тельного органа, включающие установленные ма цепи скребки, каротки для устанонки резцов с ЗІбойной стороны цепи, имеюг каретки, выполненные с возможностью установки резцов и с заваж /юй стороны цепи и, кроме того, имеют по два роп.'ка, расположенных один вслед за другим вдоль задней завальной направляющей, выполненной на приї оде в виде кольцевой конструкции о направлении при нудительного разворота обоих роликов вокруг оси приводного вала со звездой Одно из изобретений группы направлено на облегчение и упрощение конструкции става и пе редачу его функции по восприятию реактивных сил со стороны забоя частично на крепь агрегата Для этого став агрегата, включающий ба^у с направляющими исполнитепіїного органа, выпоннен 2114996 12 с двумя самостоятельно передвигаемыми базами с отдельными двигательными домкратами с системой синхронного передвижения, причем нижняя база имеет продольные балки, жестко связанные со ставом и поднятые над почвой на высоту расчетной кривизны пласта с опорой на почву через две пыжи, расположенные под забойным концом става и на завальном конце балки, а верхняя база имеет продольную балку, расположенную ниже перек рытия крепи и связанную своим завальным концом с кулисой перекрытия секции крепи, перемещаемой в пазах крепи верхним двигательным домкратом, и связанную своей средней частью с нижней базой посредством двух забойных стоек, расположенных Л-образно с наклоном верхних концов друг к другу и соединенных с верхней продольной балкой и с нижней базой сферическими кинематическими парами, например, типа уключины, для обеспечения расчетного зазора от верхней базы до кровли и отбойку исполнительным органом постоянной мощности пласта независимо от фактического положения кровли и перекрытия цепи при запертых забойных стойках Еще одной задачей одного изобретения из группы является упрощение конструкции механизма управления и обеспечение дистанционного у п равления всеми механизмами в соответствии с заданной или контролируемой фактической гип сометрией пласта Механизм регулирования перемещения нап равляющей става афегата в вертикальной плос кости содержит гидравлический плунжер с обратной пружиной подключенной в одной общей для всех механизмов управляющей гидромагистрали, при этом почвенные резцы сфуппированы на кольцевой цепи исполнительного органа в одном месте на длине не более нескольких рядом стоящих секций дпя изменения уровня подрубки почвы только против упомянутых рядом стоящих секций при изменении давления в управляющей магистрали Следующей задачей является агрегатизация крепи и става для обеспечения повышения боковой устойчивости крепи и поддержания кровли с ис пользованием става и стабилизацию става при вы емке угля с использованием крепи. Дпя ее решения секции механизированной крепи, в|{лючающие перекрытия и нижние домкраты передвижения, связывающие нижнюю базу става с основаниями, на которые оперты посадочные стойки, имеют верхнюю базу с куписой, переме щаемой в пазах крепи совместно с козырьком, поджимными плунжерами и исполнительным ор ганом и связанной с Л-образно расположенными стойками, концы которых соединены сферическими кинематическими парами с нижней и верхней ба зами Задачей изобретения является также обеспе чение дополнительного подхвата полосы кровли у забоя независимо от фактического положения корпуса перекрытия и става по высоте Для ее решения перекрытие крепи включает 13 выдвижной козырек, расло]юженный в выполненном в зоне над балкой верхней базы проеме, открытом вверх в сторону кровли и вниз, шарнирно соеди ненный своим завальным концом с балкой става и опирающийся в средней свой части на гидропатрон балки, причем консоль выдвижного козырька, выдвигающаяся совместно с балкой, имеет неиз менный зазор порядка 50 мм до линии резания кровельного резца Задачей следующего изобретения группы яв ляется полная механизация всех операций на сопряжении афегата со штреком и обеспечение качественного поддержания кровли штреков без 'їоптания" кровли независимо от прочности пород почвы в зоне сопряжения Для ее решения крепь сопряжения, состоящая из секций, соединенных между собой двумя про дольными пальцами снабжена направляющими для возможности передвижения и пространственной опоры самоходных тележек с манипуляторами, при этом прочность поперечного профиля и прочность продольных пальцев выбирается из условий воспринятия полной нагрузки от всех стоек, выби ваемых в зоне выхода агрегата в штрек и передачи этих нагрузок на рамы штрековой крепи впереди забоя, где призабоиные стойки еще не выбиты, и на рамы штрековой крепи позади агрегата, где при забоиные стойки поставлены в процессе сохранения штрека, а операции по выбивке призабойных стоек, их транспортирования и установки выполняется манипулятором, установленным на стреле сэмохо/щой тележки при дистанционном управлении манипулятором с места расположенного рядом с манипулятором выносного гидропульта Следующей задачей является повышение эффективности забойного транспорта и расширение области применения агрегата на пологие пласты и длинные лавы Для ее решения лавное транспортное обору дование агрегата, включающее забойное транс портное устройство, связанное с пластинчатой цепью исполнительного органа с образованием транспортного желоба с забойной стороны цепи, где работают забойные резцы, имеет транспортный желоб и г завальной стороны, где располагаются при большой мощности пласта средние резцы, закрепленные на каретках, при этом перераспре деление количества угля из одного желоба в другой в процессе транспорта осуществляется за счет диагонально расположенных скребков на нижней, на забойной и на верхней поверхностях цепи Кроме того, задачей изобретения является создание компоновки перегружателя совместно с энергопоездом, обеспечивающее непрерывное подвигание очистного забоя с возможностью до работки выемочного столба до минимального размера охранного целика у откаточного штрека Для решения этой задачи в перегружателе на базе серийного скребкового конвейера его загру зочная часть расположена ниже почвы забон, а стреловая часть расположена над штрековым 2114946 14 ленточным конвсйором, перемещаясь самоходными тспржками, распої оженными в ряд сбоку ленточно'о конвейера и Псігруженньїх машинами, состаі*пяюіцими эноргопорзд. при этом направляющей Д/ІЯ движения тем( ЖСК служит труба, укладываемая отрезками прямо ни почву, а движителями тележек являются спэремные двухребордные ролики, о б жимающие эти нгіпраоляющие и приводимые в движение с помощью гидродвигателой большого момента, работающих от давления рабочей эм/льсии. применяемой в гидросистеме мехкрепи. Задачей изоРр'чсиия является также обеспе чение непрсрывн1чп подвигания очистного забоя с возможностью /[ічінЬотки выемочного столба до минимального ря-.мерэ охранного целика у отка точного штрека Дпя ее решсчия в перефужатепе на базе конвейера, включающем загрузочную и стреловую члгти для псрсмоіцения стрелы перегружателя используются самоходные тележки, движущиеся по направляющим р.ждрутной крепи сопряжения. используемой дня крепления сопряжения, восп ринятия повышен [ОГО опорного горного давления, а также дли движения монтажных манипуляторов для М иажных и вспоч'10гатрльиых работ О Кроме того 1МДЗЧЄЙ изобретения является ра' ширенис обпа: їй применения радиальнопо[1шневых гилро,< [т\ ателей для шахтных условий в ои 1 Т Ы забоях і де no условиях пожароопасности СН Х применяются только водомасляная эмульсия в ку ірстве рабочей жидкости Для ее решения в гидродвигатепо большого момента для подзми рабочей жидкости к радиально рЭ' иоіюжениьім поршням ротора применен кол лектор, состоящий из двух поджимных плоских oc'RHx зопожикоп охвптывающих осевые ПЛОС КО'ти poiupd С дпух сторон и уравновешенных в on ном направлении Задачей изобретения является также обеспе чение дистанционного управления всеми меха низмами перемещения направляющих с дистанци онным KOHTpoiifJM их положения по профамме, за даваемой машинистом агрегата или автомати ческой системой Для решения JTOH задачи средство управления движении агрегата по гипсометрии пласта выпол нено в виде программатора представляющего соОой ви^уапьніїи имитатор движения по длине лапы цепи ипюянительного органа с почвенными резцами которміи гостоит из пластинчатой цепочки нл иумые приііі^димой в движение импульсами д.'і иония получ юмого по шлангу от клапана, ю с полнена жидкостью и датчиками гидростатического давления, рассредоточенными по дпине лавы, а на центральном пульте управления имеется ЭВМ. выдающая на экран пульта положение ставці в абсолютной системе координат ( отметками точек абсолютного попожсния границ имяста, прогнози руемого ЭВМ методом регрессии точек, визуалмно наблюдавшихся в ходке агрегата выходов пласта относительно става на предыдущих циклах поувигания агрегата и записанных в памяти ЭВМ в качестве объективных стационарных характерипик гипсометрии пласта в абсолютных координатах Кроме того, задачей изобретения является ус корение и облегчение монтажных работ за спет непрерывности транспортировки ( гщт агрегатл по штреку, по сопряжению и по митажной камері и удешевление применяемого оборудования за гчет его использования не юлько при монтаже агрегата, но и при эксплуатации аі регата Для решения этой задачи способ монтажя и демонтажа агрегата вандрутной крепью и само ходными тележками с манипуляторами включлст при монтаже агрегата в монтажной камере само монтаж вандрутной линии по штреку, по сопря жонию и далее непрерывно по монтажной камоос. при котором манипулятор оснащяют допопнителино двумя "руками", которыми вместе с основной "ру м" захватывают каждую секцию за три точки, пр дусмотренные в К01 іструкции секций и уз ов, транспортируют эту секцию от ш і река до мес т в лаве, кантуют и устанавливают секции в лаве, ри этом бригадой ведут гидроразсодку и отладку ,• регата с последующим перебросом вандру юй линии в эксплуатационный режим на обоих штрг 'зх. Задачей последнего изобретения группы яві •ется ускорение и облегчение самомонтажа ван рутной пинии Для се решения предлагается способ cdN монтажа вандрутной линии, который осуществі іют двумя самоходными тележками, связанными мг ду собой гидроуправняемой рукой" тстким образом іто "руку" выставляют напротив продольных пальисв, соединяющих балки вандрутной линии, гидродр і гатели тележек затормаживают производят пр >дольное перемещение крайней балки вандр та, которую после рассоединения отводят в сторо у и 21U996 16 транспортируют вдоль всей вандрутной линии на другой се конец, где подмонтируют в обратной последовательности. Группа изобретения поясняется чертежами, где общий вид агрегата представлен на фиг 1, вид со стороны забоя; на фиг 2 представлен конвейерный штрек с энергопоездом, вид А, на фиг. 3 - вариант привода цепи от гидродомкратного привода для газовых шахт (виг Е-Е) и для технологии без предварительного проведения выемочных штреков, на фиг 4 - поперечное сечение по линейной части агрегата, сечение Б-Б, на фиг 5 - сечение В-В; на фиг 6 - вид секции в плане, вид К; на фиг. 7 гидравлическая схема средств подачи става и выдвижки крепи, на фиг 8 - совмещенное по перечное сечение конвейерного штрека, вид М, на фиг 9 - сечение по приводной звездочке S сто рону лавы, сечение Г~Г на фиг 10 - сечение по гидро двигателю большого момента с двухсторонним плоским коллектором, предназначенным для работы на эмульсии (на базе серийного гидромотора Л ю диновского завода). Фронтальный агрегат нового техникоэкономического уровня включает кольцевой от бойно-доставочный исполнительный орган 1, состоящий из кольцевой цепи 7 с резцами и скребками 9 и приводов, став 2 с нижними и верхними забойными направляющими 20 и 21, секции механизированной крепи 3, связанные со ставом домкратами передвижения, транспортное оборудование 4, содержащее перегружатель 52, лавное и штрековое оборудование, крепи 54 соп ряжения лавы со штреками, средства управления 5 и средства контроля движения агрегата по гип сометрии пласта, вспомогательное оборудование 6 для механизации вспомогатепьных и трудоемких операций Став 24 агрегата содержит завальные направ/іяющиє 22, 23, имеющие возмом^юсть пере мещения в вертикальной плоскости с помощью механизмов регулирования, нижнюю и верхнюю 25 базы, которые соединены соответственно с осно ванием и перекрытием 31 крепи посредством нижних и верхних двигательных домкратов, рабо тающих синхронно средства управления 5 и контроля движения агрегата по гипсометрии пласта выполнены в виде трубопровода, внутренняя потюсть которого заполнена жидкостью и датчиками гидростатического давления, рассредоточенными по длине лавы, и ЭВМ на центральном пункте. Механизм регулирования на каждой секции става выполнен в виде подпружиненных плунжеров с питанием управляющим давлением от одной для всех механизмов регулирования линии управпения, гидравлическое давление в которую подается от имеющегося на центральном пульте управления регулятора в зависимости от положения по длине лавы почвенных резцов и в соответствии с прог раммой, олредепонной оператором агрегата или прогнозом залегания пласта, выполненным с по мощью центральной ЭВМ Крепь 54 сопряжения 17 лавы со штреками выполнена в виде вандрутной пинии снабженной направляющими 62 по которым перемещаются самоходные тележки 55 с мани пулятором 56, имеющим захват 58 для извлечения и транспортировки призабойных стоек 59 штрековой крепи Привод самоходных тележек манипулятора осуществлен от гидродвигателя большого момента работающего от эмульсии применяемой в гид рокрепи агрегата для чего коммутация рабочей жидкости радиапьно-поршневой группы гидрод вигателя осуществляется сдвоенным плоским осевым золотником Став агрегата с нижними и верхними направляющими 20 21 22 23 перед вигается синхронно на забой путем последова тельного питания нижнего и верхнего домкратов при подаче става на забой и параллельного их питания при выдвижке крепи 3 для обеспечения сброса ошибки при синхронной передаче верхнего и нижнего става на забой Переключение питания двух домкратов с последовательной схемы на па раллельную осуществляется двухходовым золот ником Исполнительный орган состоит из линейной части в виде цепи 7 с резцовыми каретками 8 и скребками 9 и концевых приводов 10 включающих корпус И и вал 12 с приводной звездочкой 13 и шестерней 14 с которой взаимодействуют вы ходные шестерни 15 серийных конвейерных при водов 16 имеющих в своем составе редуктора 17 турбомуфты 18, электродвигатели 19 во взрывоо пасном исполнении Направляющие исполни тельного органа цилиндрические 20 и 21 со сто роны забоя и коробчатые 22 и 23 со стороны завала, крепятся на ставе 24 и верхней базе 25 а на при воде выполнены в виде общего криволинейного короба 26 прибалчиваемого к корпусу 11 привода 10 Став 24 прижимается к почве забойными стойками 28 соединенными со ставом сферичес кими кинематическими парами в виде уюіючин 29 обеспечивающих компенсацию поворотов при п е редвижке става на забой ипи раздвижности крепи по мoш^^ocти пласта Аналогично выполнено крепление верхних концов забойных стоек 28 к выдвижной части 30 перекрытия 31 крепи 3 Выдвижка этой части производится с помощью пальцев 32 кулисы 33 закрепленной к цилиндру верхнего домкрата 34 Шток 35 этого домкрата с помощью пальца 36 закреплен на перекрытии 31 таким образом что выдвижка исполнительного органа на забой производится штоковой полостью верхнего домкрата при его сокращении При этом одновременно выдвигается козырек 37 связанный с пальцами 38, э также поджимным плунжером 39 с выдвижной частью 30 что обеспечивает подхват призабойной полосы кровли сразу же после ее обработки кровельными резцами 40 Наююнное Л образное положение стоек 28 обеспечивает сов местную работу крепи и исполнительного органа обеспечивая при отбойке угля не только прижатие става к почве, но и воспринятие крепыо продольных 2114996 18 сия рсзанин ВДОЛІ, очистного забоя В то же время такор расположение забойных стоек при выдвижке крепи обеспечиїзасі восприятие ставом боковых ре'^кций от перекрытия крепи что повышает ее боювую упои 1И(10ст[, на крутых и наклонных пл істах Прижатие носкл става к почве достигается за СЧ11 юго что гти имеет две пыжи носовую 41 и хвосювую 42 г к [И[)енсом до почвы в пределах расчетной кривизны пласта Посадочные стойки 43 кріпи опирлютги Hd основания 44 крепи причем горизонтіїпьнан (и^нь порекры1ия 31 с основанием 44 осуществляется посредством двух балансиров 4^ї при этом выднижк.^ крепи и подача става на заіюи произлодиті я нижним домкратом 46 соотвеи'твенно штокоіісій W поршневой стороной этого домкрата Синхрониззция величины подачи става 24 и верхней ба^ы 25 на забой осуществляется путем по исдоватрпьнию питания нижнего и верхнего Д0( ікрата при подаче става и параллельного их пи -іния при выд| ижке крепи для чего применен в ГИДрОСХСМС ДВуХХ: іДОВОИ ЗОЛОТНИК 4 7 Работает гид[іиіхема следующим образом при подаче гостам на забой напор Н подается в поршнепую попоїть нижнего домкрата 46, из шюковои полости жидкость подается через 30лоїник 47 в штокоі^ую полость верхнего домкрата 34 с I -ми же диамет[ ами !то и нижний Из поршневой ПОІ Of ти [іСрхного домк[іата жидкость уходит на слив С При реверсе д^имсния в подводах Н и С золотник пс[ екпючаеіся и давление из подвода С попадает в поріннеїзую попості іісрхнего домкрата, а из щтоK h H полости вытесняется на линию Н где будет OO спинное давление Аналогично, т є в самостоятс іьіюм партлиепьном питании работает и нижний домкрат Паралшпыюс питание этих домкратов в ка И гкпрості ю Размещение стрелы перегружателя над лен то иым коннрйером достигается за счет того, что на 19 2114996 20 сопряжении лавы со штреком и^іимснена ванд ругная крепь 54, состоящая из Палок двутаврового поперечного сечения, по нижней полке которого передвигаются самоходные тележки 55, сооди ненные попарно с размеїцснием между парами тележек манипуляторов 56 Стргіїча манипулятора 57 используется для разнообр иных вспомога тельных работ, в том числе дси перемещен ш стрелы перегружателя 52, для иыдергиванил и перемонтажа призабойной ножки /стойки) штре ковой крепи (захватом 58), для [імнспортировки и установки этой ножки (стойки) ((о>ле прохода НІ регата (ножки 59) и для выполнения подъемнотранспортных операций на сопряжении с лавой и на конвейерном (а также на вентиляционном) штреках на всей длине вандрутного крепления при эксп луатации очистного забоя, в том чиспе демонтаж балок 54 вандрутной крепи, механизированную транспортировку их вдоль всей минии вандрутной крепи и подмонтаж очерсдіюй гіалки на другом конце вандрутной крепи в обрл'ной писледова тельности, чем достигается ниоцссс движения вандрутной линии в направлении „ двигапия фронга очистного забоя сдвоенный плоский осевой золотник из двух под вижных в осевом направлении плоских золотников 69 и 70, связанных со статором 71 и обжимающих с двух сторон вращающийся венец ротора 72, Бла годаря этому достигается уравновешивание их в осевом направлении и коммутация рабочей жид кости по большой поверхности вращения в точках 74 и 75 и полный выбор зазора в паре, что необ ходимо из-за малой вязкости эмупьсии. При работе с погашением шіргков манипулятор 56 используется для извлечение из завала звеньув штрековой крепи, в этом случае процесс выдер гивания производится за счет с;г)іек являются спаренные двухребордные ролики, ОЬ" жимающие эти направляющие и приводимые в движение с помощью гидродвиі лелей большого 2114996 24 момента, работающих от давления рабочей эмульсии, применяемой в гидросистеме мехкрепи Или вместо такого выполнения может исполь зоваться перегружатель на базе конвейера с уве личением его производительности за счет малой длины и увеличенной скорости, отличающийся тем, что для перемещения стрелы перегружателя ис пользуются самоходные тележки, движущиеся по направляющим вандрутной крепи сопряжения, используемой для крепления сопряжения, восп ринятия повышенного опорного горного давления, а также для движения монтажных манипуляторов для монтажных и вспомогатепьных работ. Для данного агрегата предлагается также гидродвигзтель большого момента, в котором для подачи рабочей жидкости к радиально распопожснным поршням ротора применен коплектор. состоящий из двух плоских осевых золотников, охватывающих осевые плоскости ротора с двух сторон и уравновешенных в осевом направлении В данном агрегате может использоваться средство управления движения агрегата по гип сометрии ппаста выполненное в виде программа тора, представляющего собой визуапьный имитатор движения по длине лавы цепи испопнительного органа с почвенными резцами, который состоит из пластинчатой цепочки на пульте, приводимой в движение импульсами давления, получаемого по шлангу от клапана, взаимодействующего с кула ками на оси привода по числу зубьев звезды, звенья цепочки имеют винты, настраиваемые машинистом агрегата, которые взаимодействуют с лимбом ре гулятора давления, подаваемого в линию управ ления механизмами завальной направляющей в зависимости от фактического положения почвенных резцов ло длине лавы и в зависимости от программы, задаваемой машинистом Для агрегата предлагается также средство контроля фактического положения агрегата отно сительно границы уголь - порода, включающее трубопровод, состоящий из жестких и гибких участков с тензометричсскими датчиками изгиба в горизонтальной и вертикальной плоскости, в котором внутренняя полость трубопровода заполнена жидкостью и датчиками гидростатического дав ления, рассредоточенными по длине лавы, а на центральном пульте управления имеется ЭВМ, выдающая на экран пульта попожения става в абсолютной системе координат с отметками точек абсолютного положения границ пласта, прогнози руемого ЭВМ методом регрессии точек, визуально наблюдавшихся в ходке агрегата выходов пласта относительно става на предыдущих циклах под вигания агрегата и записанных в памяти ЭВМ в качестве объективных стационарных характеристик гипсометрии пласта в абсолютных координатах Агрегат работает следующим образом Производится включение с некоторыми за держками по времени всех шести (если сборка полная) серийных конвейерных приводов с элект родвигателями 19 и турбомуфтами 18. которые • J,' 25 сглаживают разнобой пусковых и рабочих харак теристик разных электродвигателей, вынужденных работать точно с равными оборотами на одну и ту же шестерню 14, которая вращает звезду 13 и рабочую цепь 7 Уголь отбивается одновременно по всей длине лавы резцами 40, которые располаї се ются под разными углами и охватывают линии ре зания нижней половины мощности пласта при движении по нижним направляющим и оЬрабаты ваются все линии резания верхней половины мощности ппаста при движении цепи по верхним направляющим 20 и 21. Обработка почвы и кровли осуществляется только крайними "почвенными" резцами, положение которых зависит от высоты настройки завальні^іх направляющих 22 Уголь транспортируется вдоль лавы по двум желобам одновременно Левый желоб 48 от забоя до цилиндрической направляющей заполняется непосредственно со стороны забоя и транспортируется скребками 49, которые однов ременно смещают уголь под цепью вперед, спе реди цепи - вверх и над цепью - о сторону за вала Второй желоб 50 заполняется сверху и из первого желоба, и скребками 51 уголь транспор тируется до загрузочной головки перегружателя 52 Перегружатель своей разгрузочной стрсіюіл поднят над лентой и перегружает уголь на него, затем на другие шахтные ленточные конвейеры до ствола или до поверхности в зависимости от типа шахты Главным условием рациональной схемы является непрерывность транспорта от агрегата, отсутствие узких мест с пониженной пропускной способностью Поэтому производительность сис темы агрегат - шахта является наибольшей, если пропускная способность транспорта порядка 20 т/мин имеет место и в забое, и по всей транс портной цепи и если передвижение всего забойної о оборудования, включая крепь, став, персгружатепь и энергопоезд, может производиться без остановок и перерывов в добыче и транспортировке угля Перемещение энергопоезда осуществляется с помощью гидравлических движителей либо ол повременно с подачей става, либо по команде с центрального гидропульта 5. где имеются специ альные клапаны для подачи рабочей -эмульсии в гидро двигатели 60 и домкраты 63. Управление агрегатом по гипсометрии плаї і а осуществляется автоматически по программе, закладываемой машинистом агрегаїа в програм маторо путем подвертывания винтов 80 имєюиіих нумерацию секции. Если, например, машинист вывернет випт N 10 на 1 оборот, т е. на 1,5 мм, то этот винт войдет т взаимодействие с лимбом регулятора давления Ml только тогда, когда каретка исполнительного opi мна с почвенным резцом выйдет против секции крепи IN 10. Именно в этот момент давление в линии уп равления 82 увеличится на 10 атм, что приведет к раздвижке домкратов на 10 мм, что соответстії>;от заглублению почвенного резца в почву на 6 мм с подрубкой почвы на 6 мм только в зоне секции N Ю 2114996 26 Таким образом, машинист знает что вворачивание любого винта на 1 оборот означает, что далее система звтоматичесі и будет увеличивать подрубку почвы на 6 мм против той секции, номер которой написан на винте, ксорый регулировал машинист (масш I d(jy 1 Ь мм вин I I соответствует 6 мм подрубки почвы) Фаіаичеі кое опу' кание почвы в зоне носка става (в лПгонютном измерении) определяет сис тема кон 1 )0| 1я абсомютных координат, которая 1 выдаст на дисплей L'BM 83 развертку попожения подошвы С11занные со ставом и поднятые над почвой на ВЫС01У расчетной кривизны пласта с опорой на почву через две лыжи, расположенные под з а бойным концом става и на завальном конце балки, а верхняя база имеет продопьную балку, распогюженную ниже перекрытия крепи и связанную своим завйпьиым концом і: куписой перекрытии секции крепи, перемещаемой в пазах крепи верхним двигательным домкратом, и связанную своей средней частью с нижней базой посредством двух забойных стоек, расположенных Л-образно с накітоіїом верхних концов друг к другу и соеди ненных с верхней продольной балкой и с нижней базой сферическими кинематическими парами, например, типа уключины, для обеспечения рас четного зазора от верхней базы до кровли и отбойки исполнительным органом постоянной мощности пласта независимо от фактического положения кро1'>!1и и перекрытия крепи при запертых забойных сюйках 7 Механизм регулирования перемещения направляющей става агрегата в вертикальной плоскости, отличающийся тем, что он содер>1Л1Т гидравлический плунжер с обратной пружиной, подключенный к одной общей для всех механизмов управпяю! \ \ev\ гидромагистрали, при этом почвенные резцы сгруппированы на кольцевой цепи исполнитепьно! и органа в одном месте на длине не более нескольких рядом стоящих секций для изменения уро[іня подрубки почвы только против упомянутых рядом стоящих секций при изменении давления в управляющей магистрали. 8. Секции механизированной крепи, вклю чающие перекрытия и нижние домкраты передвижиния, спя-1ывающии нижнюю базу става с ос нованиями, на которые оперты посадочные стойки. отличающиеся тем, что они имеют верхнюю базу с кулисой, перемещаемой в пазах крепи совместно с козырьком, подвижными плунжерами и исполни тельным ор1 аном и связанной с П-образно располо>1А^ЩА° Г to to cr. о RU 2114996 СІ 41 42 21И996 71 74 73 68 67 75 ON 0^ M g
ДивитисяДодаткова інформація
Назва патенту англійськоюCoal cutting machine “dnipro”
Назва патенту російськоюУгольный нарезной комбайн «днепр»
МПК / Мітки
МПК: E21C 27/02
Мітки: вугільній, дніпро, нарізний, комбайн
Код посилання
<a href="https://ua.patents.su/22-33876-vugilnijj-nariznijj-kombajjn-dnipro.html" target="_blank" rel="follow" title="База патентів України">Вугільний нарізний комбайн “дніпро”</a>
Вугільний нарізний комбайн
Номер патенту: 22700
Опубліковано: 07.04.1998
Автори: Кузнецов Едуард Анатольович, Яворський Василь Миколаєвич, Фахрутдінов Газіз Шарафеевич, Родіонов Іван Федорович
МПК: E21C 27/02
Мітки: комбайн, нарізний, вугільній
Формула / Реферат:
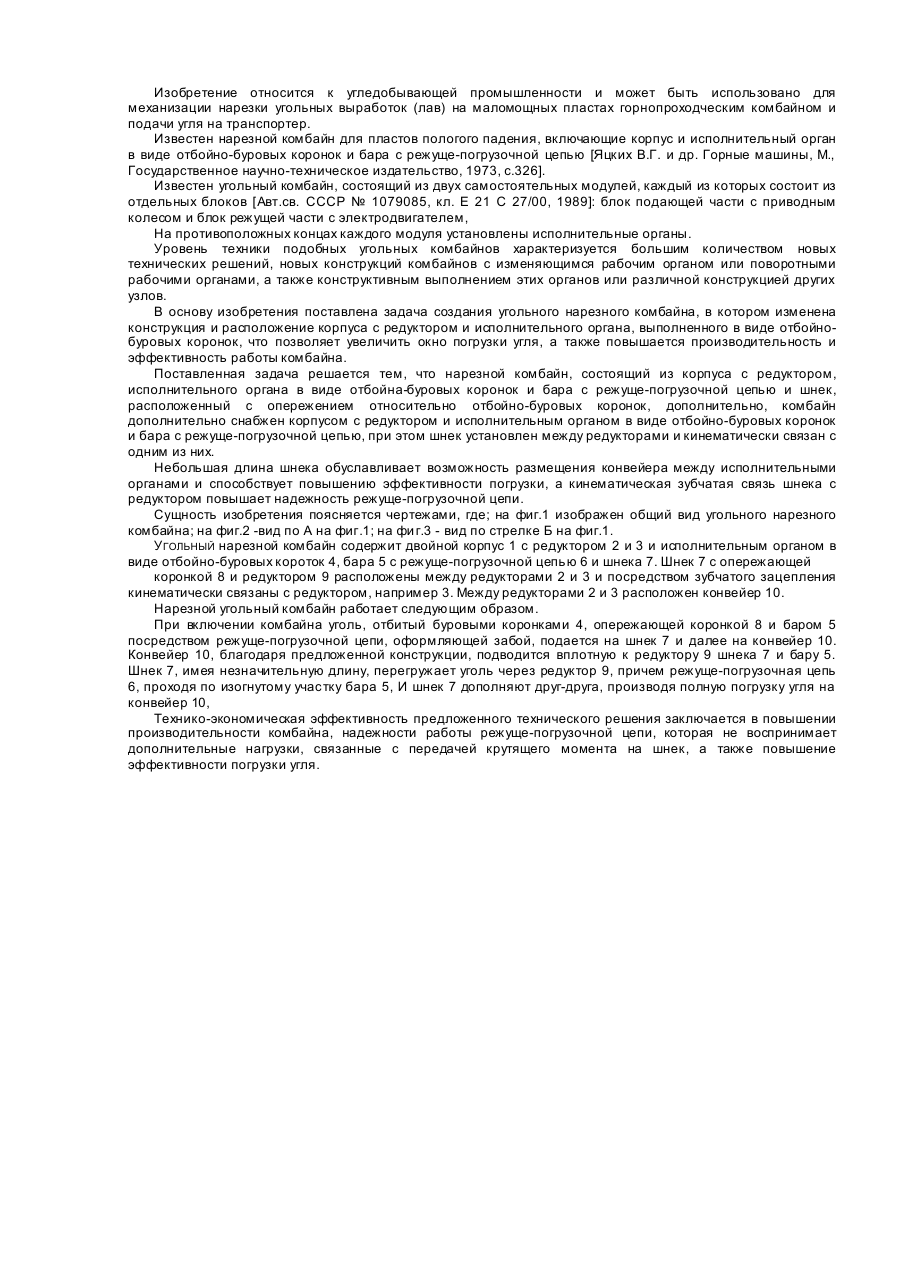
Угольный нарезной комбайн, включающий корпус с редуктором и исполнительный орган в виде отбойно-буровых коронок, бара с режуще-погрузочной цепью и шнек, расположенный с опережением относительно отбойно-буровых коронок, отличающийся тем, что он дополнительно снабжен корпусом с редуктором и исполнительным органом в виде отбойно-буровых коронок и бара с режуще-погрузочной цепью, при этом шнек установлен между редукторами и кинематически связан с...
Вугільний комбайн для крутих пластів
Номер патенту: 19174
Опубліковано: 25.12.1997
Автори: Гарячий Володимир Григорович, Ковальов Валерій Дмитрович, Першин Валентин Федорович, Ільін Анатолій Ільіч, Васильєв Олександр Григорович, Гелюх Віктор Степанович, Коденко Борис Олексійович
МПК: E21C 27/00
Мітки: пластів, комбайн, вугільній, крутих
Формула / Реферат:
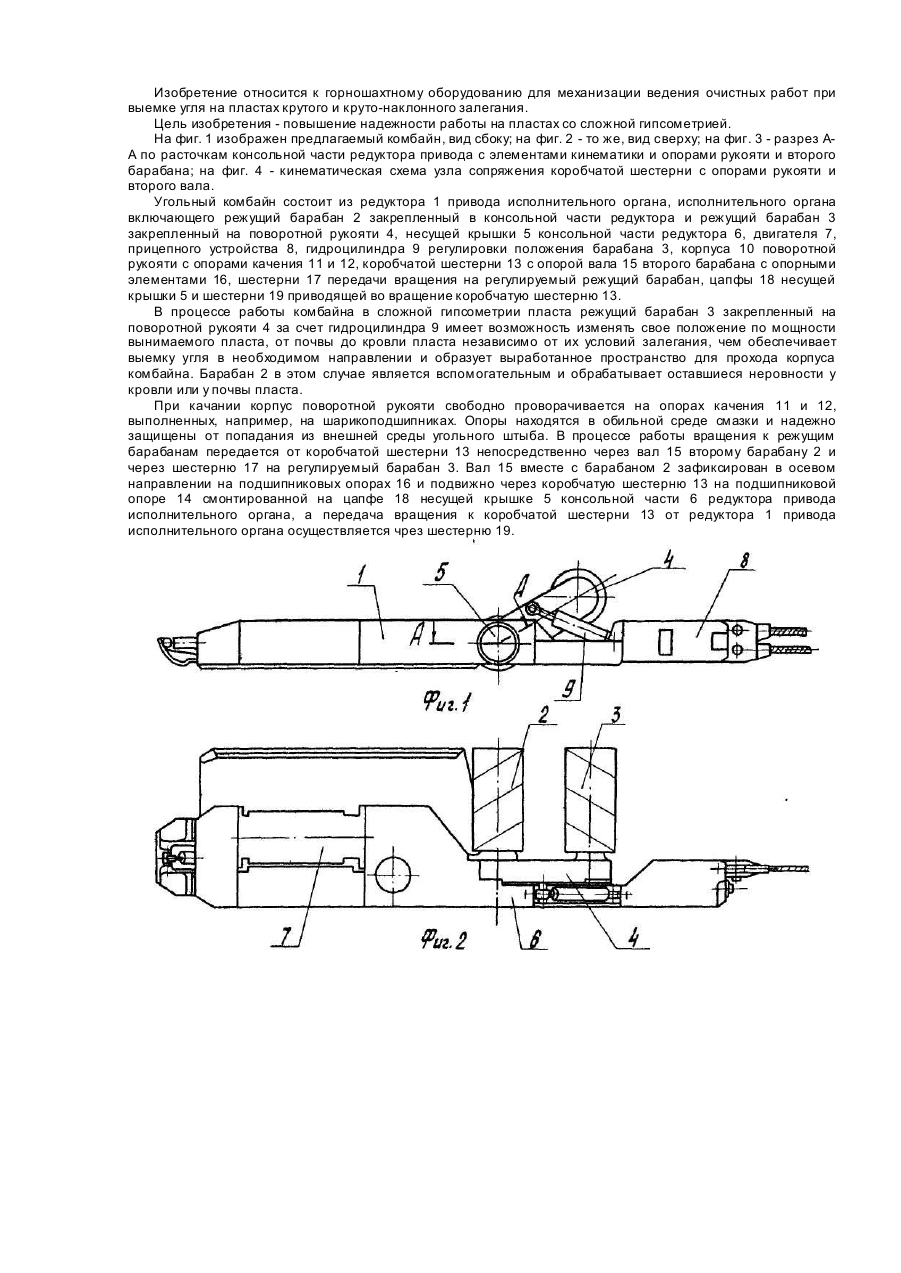
Угольный комбайн для крутых пластов, включающий корпус, в котором расположены двигатель и редуктор привода исполнительного органа, выполненного в виде двух барабанов, один из которых жестко закреплен в корпусе редуктора, а другой - установлен на поворотной рукояти, шарнирно соединенной с корпусом редуктора, отличающийся тем, что он снабжен коробчатой шестерней и имеющей цапфу крышкой, жестко закрепленной в консольной части редуктора, причем...
Самоцентрівне електродне з’єднання та нарізний вугільний ніпель (варіанти)
Номер патенту: 27762
Опубліковано: 16.10.2000
Автори: Фульдженці Кресченцо Фернанто, Коулмен Філіп Денніс, Стюарт Джеймс Рей, Кольц Джеймс Аллен
МПК: H05B 7/14
Мітки: ніпель, варіанти, з'єднання, самоцентрівне, нарізний, електродне, вугільній
Текст:
...нитками резьбы расположен гребень, составляющий с ней одно целое, причем гребень выходит наружу из указанной части основания, но в меньшей степени, чем указанные разделенные промежутками нитки резьбы, при этом гребень имеет истирающийся, заостренный край, выполненный с возможностью создания плоской поверхности и удержания резьбового ниппеля соосно с секцией электрода, при этом плоская поверхность опирается на плоскую поверхность...
Нарізний комбайн
Номер патенту: 61191
Опубліковано: 17.11.2003
Автори: Фахрутдінов Газіз Шарафеєвич, Погрібний Григорій Олександрович, Брагін Володимир Михайлович, Лунєв Сергій Георгійович
МПК: E21C 27/02
Формула / Реферат:
Нарізний комбайн, що складається з корпусу з виконавчим органом, механізму подання у вигляді гідродомкратів, які зв'язані горизонтальними шарнірами з корпусом та розпірними стояками, який відрізняється тим, що він обладнаний лижею з віссю, жорсткою регульованою тягою, один кінець якої закріплений шарніром на корпусі, а другий - на осі опорної лижі, при цьому гідродомкрати з боку кріплення до розпірних стояків обладнані додатковим шарніром з...
Вузькозахватний вугільний комбайн “таран-2″
Номер патенту: 41554
Опубліковано: 17.09.2001
Автори: Мітько Іван Михайлович, Фахрутдінов Газіз Шарафєєвіч, Попов Вадим Олександрович, Лазебних Михайло Михайлович
МПК: E21C 27/02
Мітки: комбайн, таран-2, вузькозахватний, вугільній
Формула / Реферат:
Вузькозахватний вугільний комбайн, який складається з виконавчого органу у вигляді бара з різцями та бурових коронок, тягового ланцюга, редукторів першого та другого ступенів і електродвигуна, який відрізняється тим, що під редуктором різальної частини комбайна закріплена лижа, виконана у вигляді напрямної дугоподібної форми, а в нижній частині комбайна, яка подає його, встановлений плуг з лемешем і домкрат зі штоком, який опертий на плиту,...
Попередній патент: Спосіб виробництва гранул цеоліту х з низьким вмістом діоксиду кремнію і з низьким вмістом інертного зв’язуючого
Наступний патент: Ентеросорбент “фібрабет”
Випадковий патент: Желейний мармелад