Система телеінспекції трубопроводів
Номер патенту: 40855
Опубліковано: 16.12.2002
Автори: Баранов Юрій Вячеславович, Бондар Анатолій Юрьйович, Петровський Артур Адамович, Маслак Віктор Миколайович


Формула / Реферат
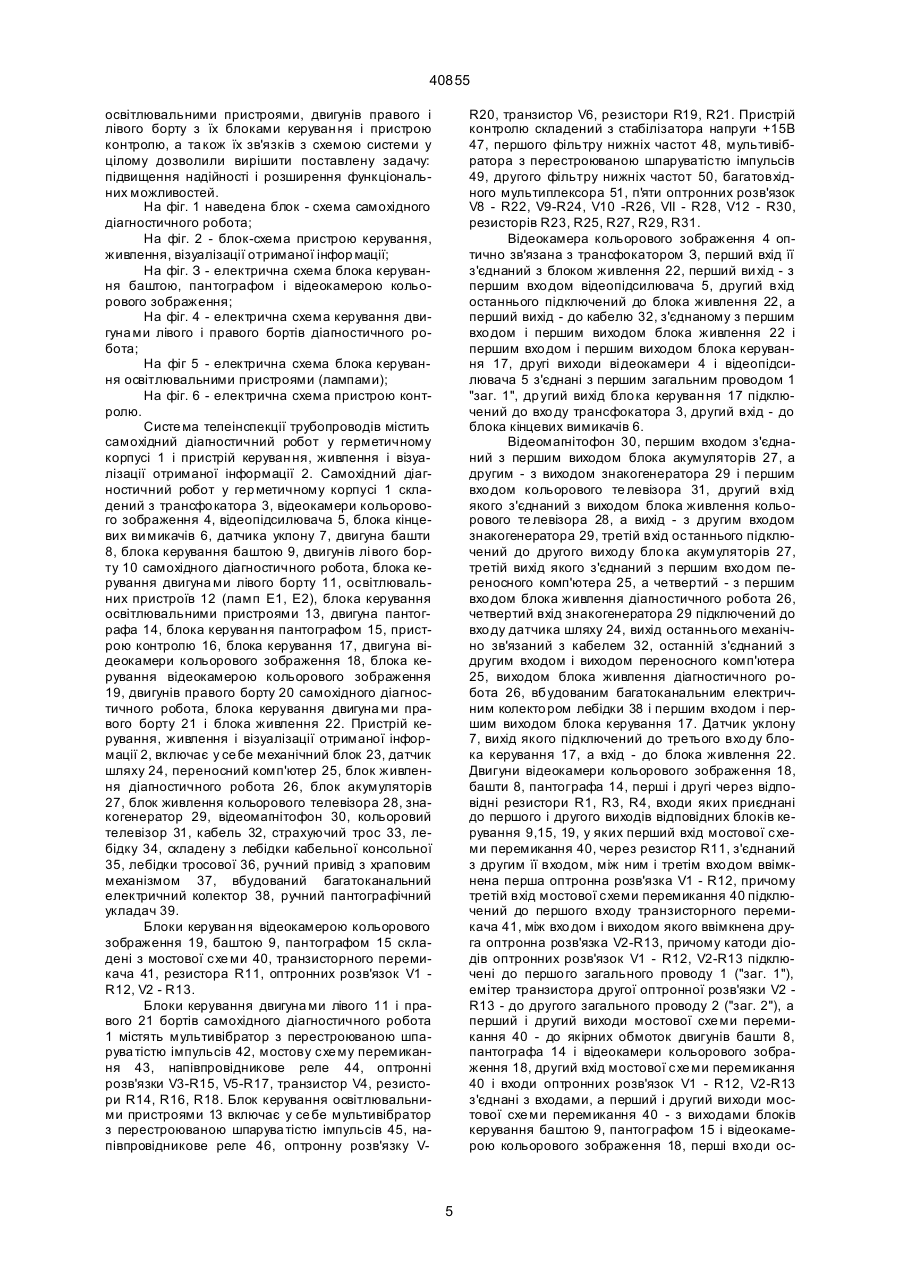
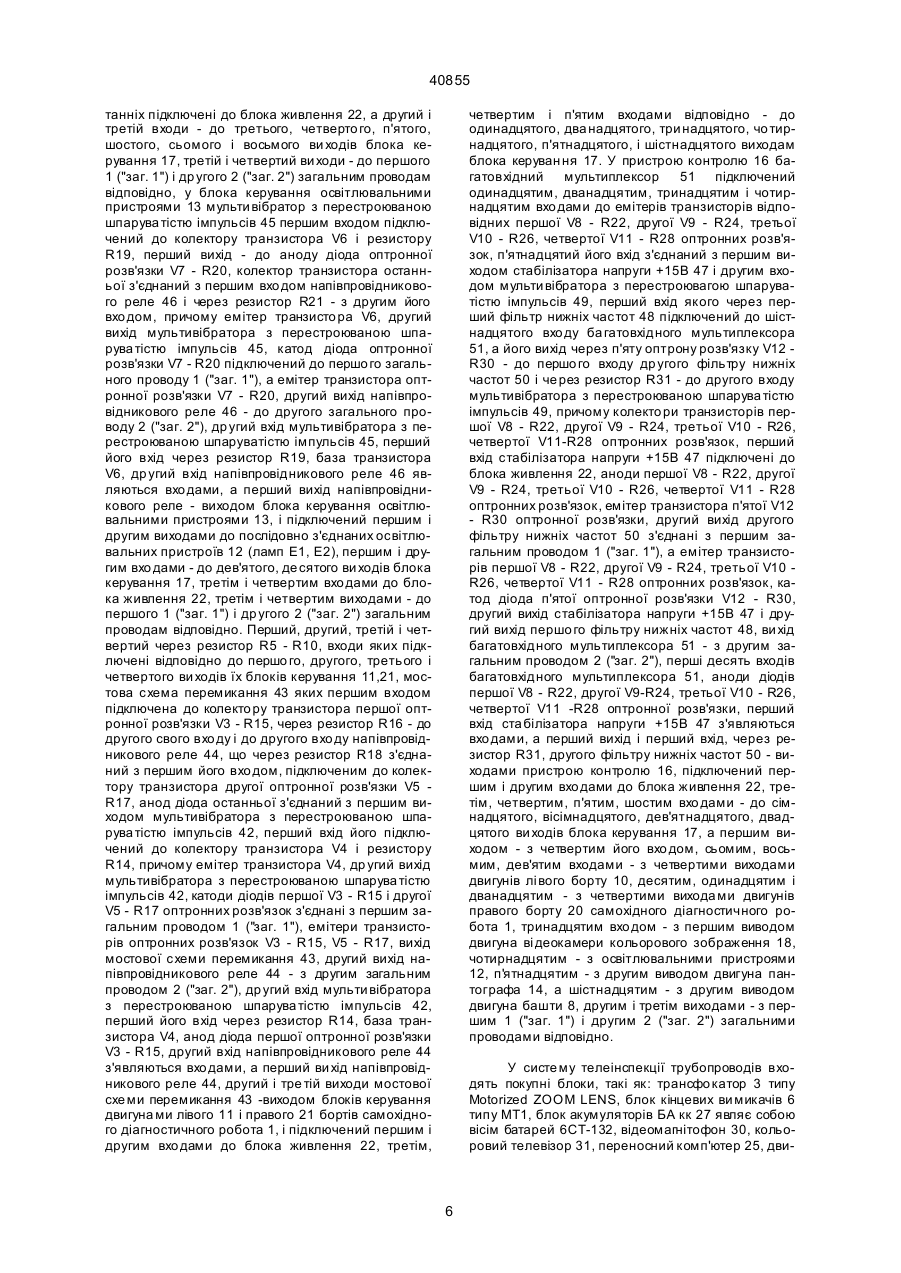
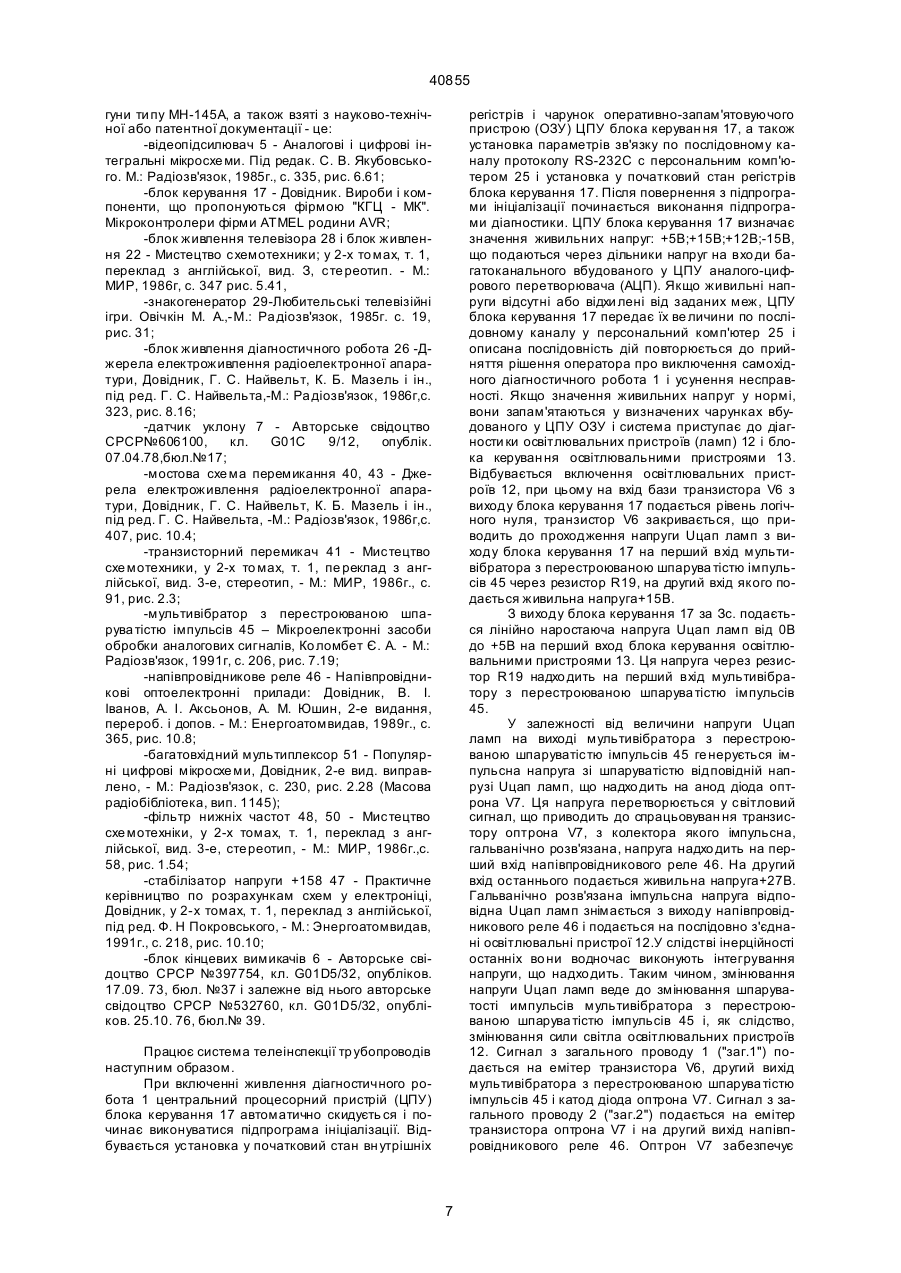
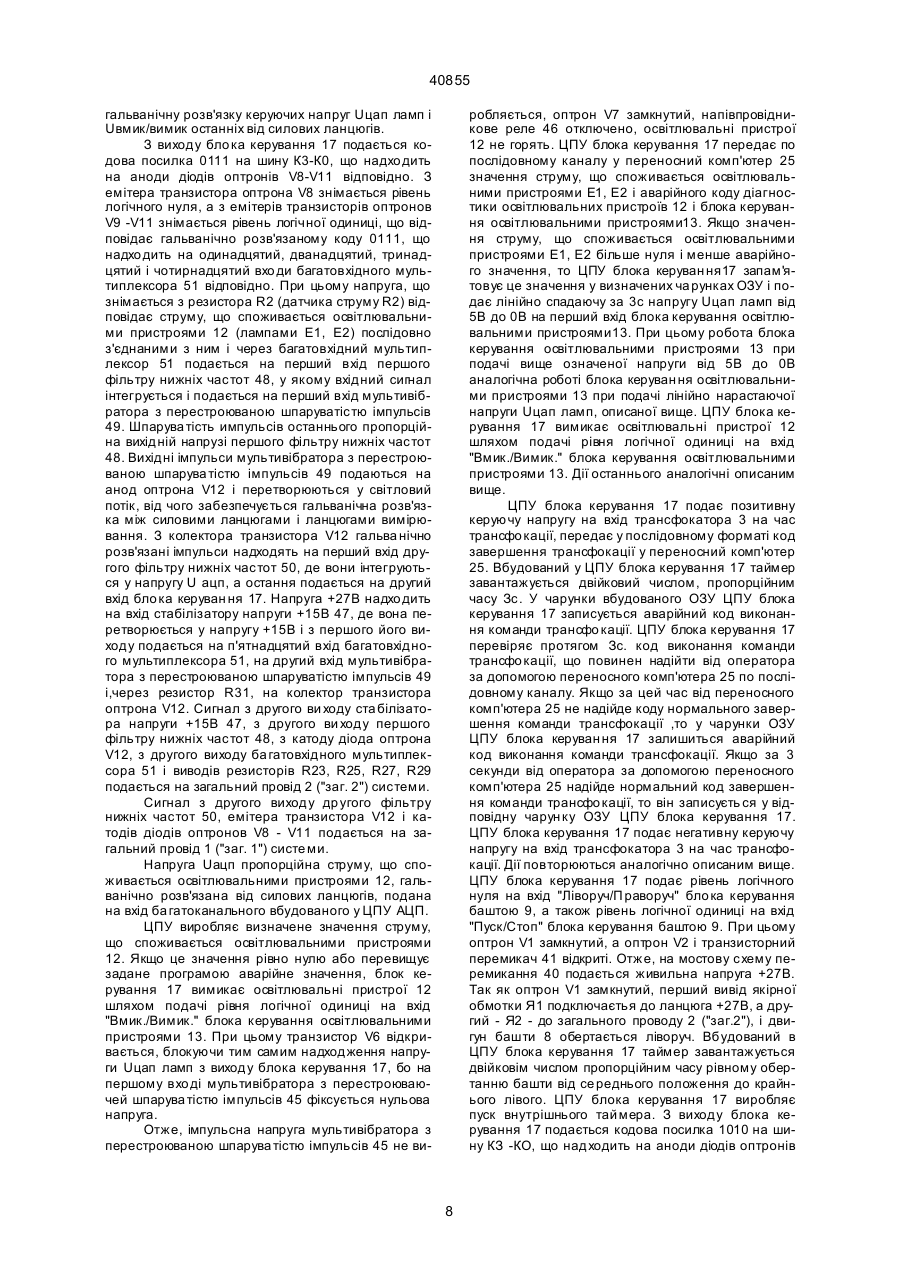
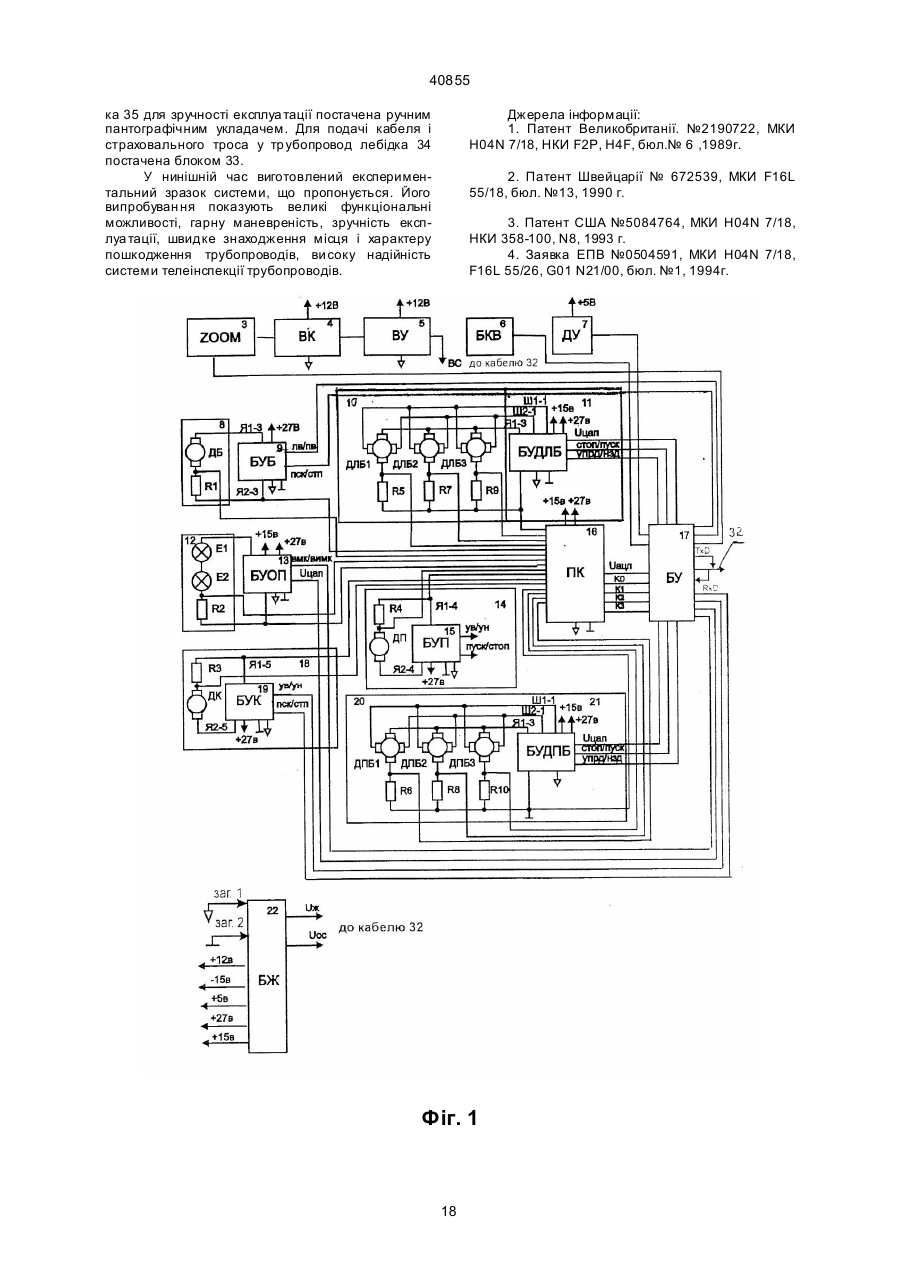
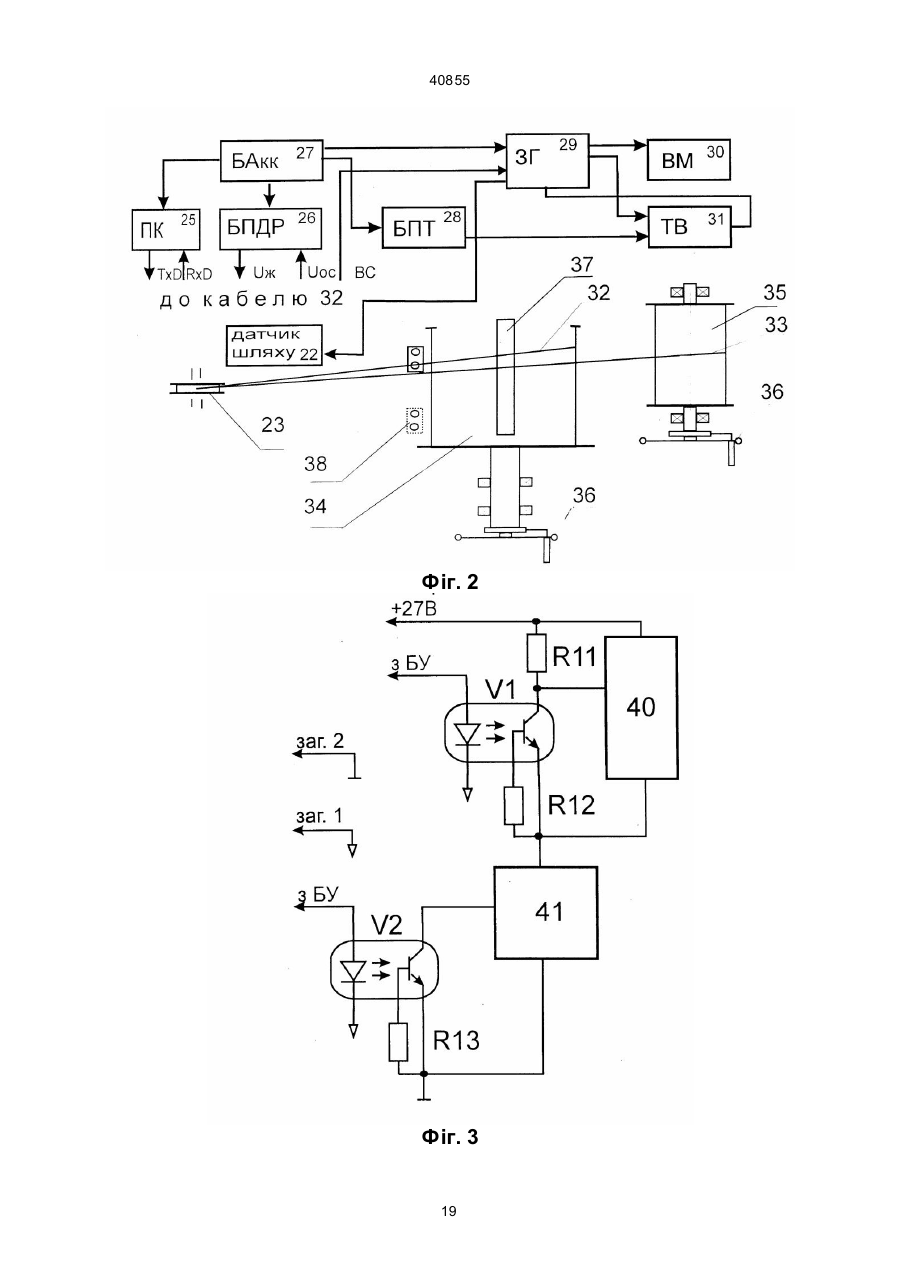
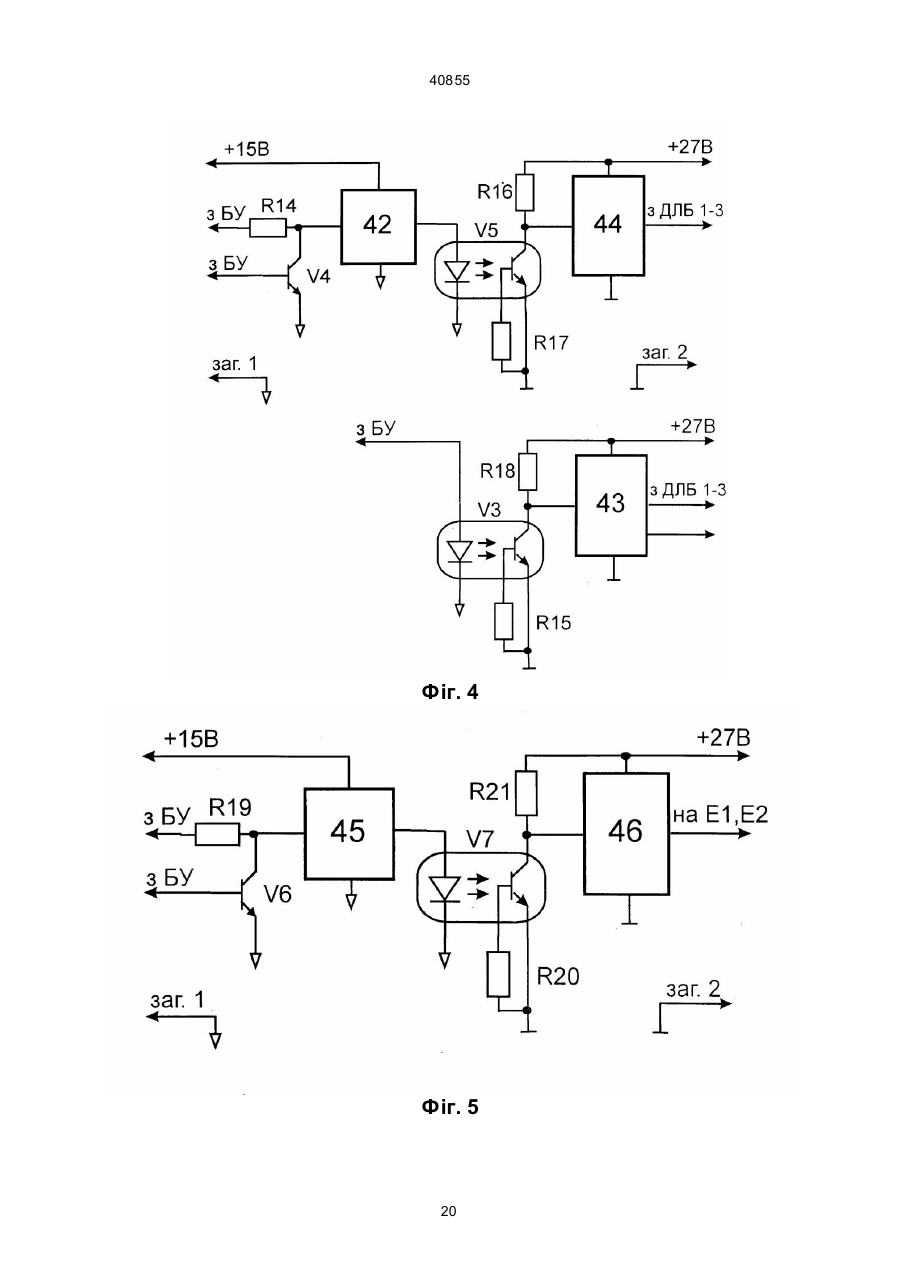
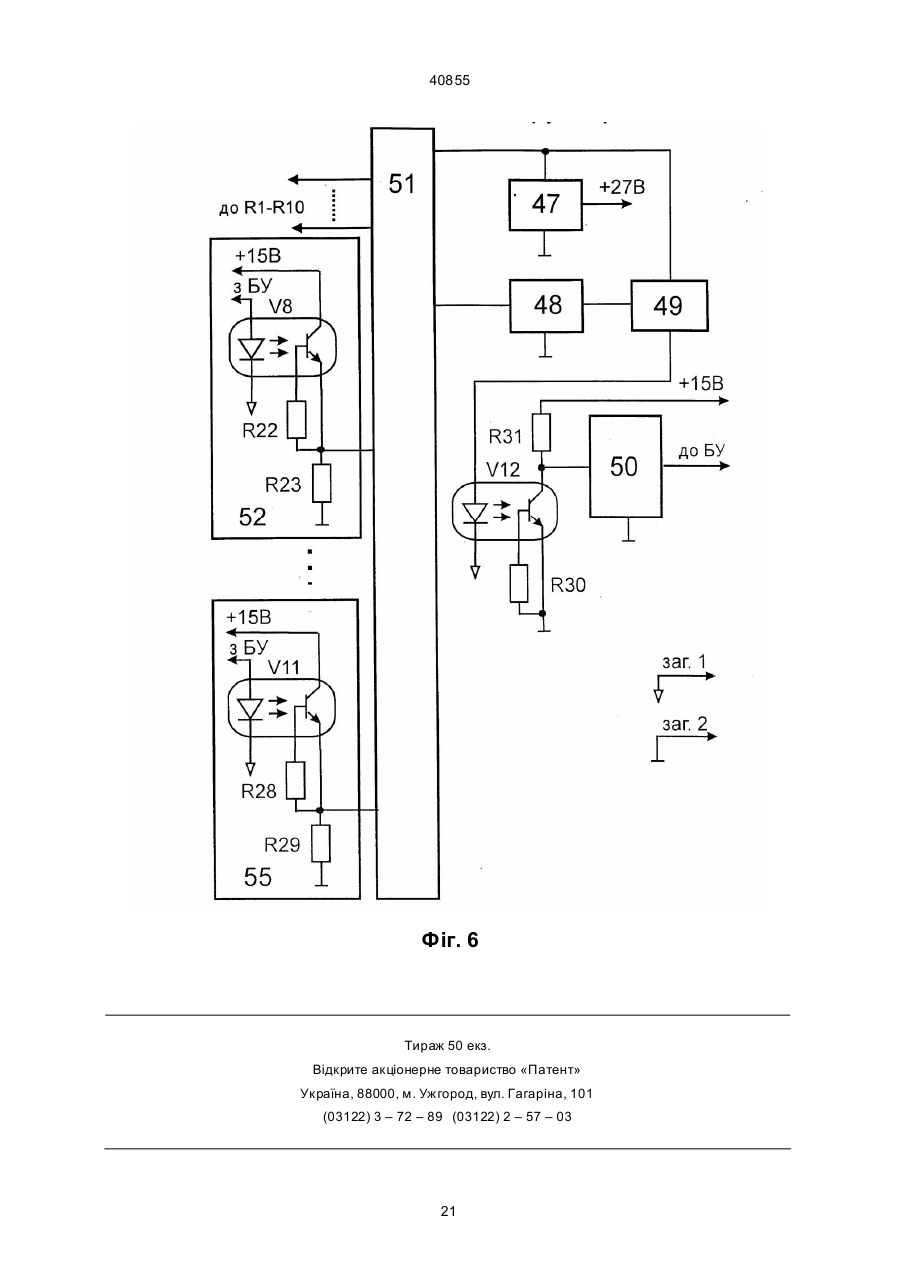
Система телеінспекції трубопроводів, що містить самохідний діагностичний робот в герметичному корпусі, складений з освітлювальних пристроїв, відеокамери кольорового зображення, розміщеної у головній його частині, на башті, оптично зв‘язаній з трансфокатором, перший вхід її з'єднаний з блоком живлення, перший вихід - з першим входом відеопідсилювача, другий вхід останнього підключений до блока живлення, а перший вихід - до кабелю, з'єднаного з першим входом і першим виходом блока живлення і першим входом і першим виходом блока керування, другі виходи відеокамери кольорового зображення і відеопідсилювача з'єднані з першим загальним проводом, другий вихід блока керування підключений до входу трансфокатора, другий вхід - до блока кінцевих вимикачів, пристрій керування, живлення і візуалізації отриманої інформації складений з відеомагнітофона, перший вхід якого з'єднаний з першим виходом блока акумуляторів, а другий - з виходом знакогенератора і першим входом кольорового телевізора, другий вхід якого з'єднаний з виходом блока живлення телевізора, а вихід - з другим входом знакогенератора, третій вхід останнього підключений до другого виходу блока акумуляторів, третій вихід якого з'єднаний з першим входом переносного комп'ютера, а четвертий - з першим входом блока живлення діагностичного робота, четвертий вхід знакогенератора підключений до входу датчика шляху, вихід останнього механічно зв'язаний з кабелем, останній з'єднаний з другим входом і виходом переносного комп'ютера, другим входом і виходом блока живлення діагностичного робота, вбудованим багатоканальним електричним колектором лебідки, яка відрізняється тим, що лебідка містить шасі, на якому на одній осі одна за одною розміщені лебідка кабельна консольна і лебідка тросова, а спереду кабельної лебідки встановлений ручний пантографічний кабелеукладач, у самохідний діагностичний робот введені датчик уклону, вихід якого підключений до третього входу блока керування, а вхід - до блока живлення, пантограф, встановлений на самохідному шасі і утримуючий башту і двигуни відеокамери кольорового зображення, башти і пантографа, перші і другі входи яких через резистори приєднані до першого і другого виходів відповідних блоків керування, виконаних на мостовій схемі перемикання, перший вхід якої через резистор з'єднаний з другим її входом, між ним і третім входом ввімкнена перша оптронна розв'язка, причому третій вхід мостової схеми перемикання підключений до першого входу транзисторного перемикача, між входом і виходом якого ввімкнена друга оптронна розв'язка, причому катоди діодів оптронних розв'язок підключені до першого загального проводу, емітер транзистора другої оптронної розв'язки - до другого загального проводу, а перший і другий виходи мостової схеми перемикання - до якірних обмоток двигунів башти, пантографа і відеокамери кольорового зображення, другий вхід мостової схеми перемикання і входи оптронних розв'язок з'єднані з входами, а перший і другий виходи мостової схеми перемикання - з виходами блоків керування баштою, відеокамерою кольорового зображення і пантографом, перші входи останніх підключені до блока живлення, а другий і третій входи - до третього, четвертого, п'ятого, шостого, сьомого і восьмого виходів блока керування, третій і четвертий виходи - до першого і другого загальних проводів відповідно, блок керування освітлювальними пристроями містить в собі мультивібратор з перестроюваною щілинністю імпульсів, перший вхід якого підключений до колектора транзистора і резистора, перший вихід - до анода діода оптронної розв'язки, колектор транзистора останньої з'єднаний з першим входом напівпровідникового реле і через резистор - з другим його входом, причому емітер транзистора, другий вихід мультивібратора з перестроюваною щілинністю імпульсів, катод діода оптронної розв'язки підключені до першого загального проводу, а емітер транзистора оптронної розв'язки, другий вихід напівпровідникового реле - до другого загального проводу, другий вхід мультивібратора з перестроюваною щілинністю імпульсів, перший його вхід через резистор, база транзистора, другий вхід напівпровідникового реле є входами, а перший вихід напівпровідникового реле - виходом блока керування освітлювальними пристроями, який підключений першим і другим виходами до послідовно з'єднаних ламп освітлювальних пристроїв, першим і другим входами - до дев'ятого, десятого виходів блока керування, третім і четвертим входами - до блока живлення, третім і четвертим виходами - до першого і другого загальних проводів відповідно, двигуни лівого і правого борту, перший, другий, третій і четвертий входи яких через резистор підключені відповідно до першого, другого, третього і четвертого виходів їх блоків керування, складених з мостової схеми перемикання, першим входом підключеної до колектора транзистора першої оптронної розв'язки, через резистор - до другого свого входу і до другого входу напівпровідникового реле, що через резистор з'єднаний з першим його входом, підключеним до колектора транзистора другої оптронної розв'язки, анод діода останньої з'єднаний з першим виходом мультивібратора з перестроюваною щілинністю імпульсів, перший вхід його підключений до колектора транзистора і резистора, причому емітер транзистора, другий вихід мультивібратора з перестроюваною щілинністю імпульсів, катоди діодів першої і другої оптронних розв'язок з'єднані з першим загальним проводом, емітери транзисторів оптронних розв'язок, вихід мостової схеми перемикання, другий вихід напівпровідникового реле - з другим загальним проводом, другий вхід мультивібратора з перестроюваною щілинністю імпульсів, перший його вхід через резистор, база транзистора, анод діода першої оптронної розв'язки, другий вхід напівпровідникового реле є входами, а перший вихід напівпровідникового реле, другий і третій виходи мостової схеми перемикання - виходами блоків керування двигунами лівого і правого борту, підключених першим і другим входами до блока живлення, третім, четвертим і п'ятим входами відповідно - до одинадцятого, дванадцятого, тринадцятого, чотирнадцятого, п'ятнадцятого і шістнадцятого виходів блока керування, пристрій контролю, що містить багатовхідний мультиплексор, підключений одинадцятим, дванадцятим, тринадцятим і чотирнадцятим входами до емітерів транзисторів відповідно першої, другої, третьої, четвертої оптронних розв'язок, п'ятнадцятий його вхід з'єднаний з першим виходом стабілізатора напруги і другим входом мультивібратора з перестроюваною щілинністю імпульсів, перший вхід якого через перший фільтр нижніх частот підключений до шістнадцятого входу багатовхідного мультиплексора, а його вихід через п'яту оптронну розв'язку - до першого входу другого фільтра нижніх частот і через резистор - до другого входу мультивібратора з перестроюваною щілинністю імпульсів, причому колектори транзисторів першої, другої, третьої і четвертої оптронних розв'язок, перший вхід стабілізатора напруги підключені до блока живлення, аноди першої, другої, третьої, четвертої оптронних розв'язок, емітер транзистора п'ятої оптронної розв'язки, другий вихід другого фільтра нижніх частот з'єднані з першим загальним проводом, а емітери транзисторів першої, другої, третьої, четвертої оптронних розв'язок, катод діода п'ятої оптронної розв'язки, другий вихід стабілізатора напруги і другий вихід першого фільтра нижніх частот, вихід багатовхідного мультиплексора - з другим загальним проводом, перші десять входів багатовхідного мультиплексора, аноди діодів першої, другої, третьої і четвертої оптронних розв'язок, перший вхід стабілізатора напруги є входами, а перший вихід і перший вхід через резистор другого фільтра нижніх частот - виходами пристрою контролю, підключеного першим і другим входами до блока живлення, третім, четвертим, п'ятим, шостим входами - до сімнадцятого, вісімнадцятого, дев'ятнадцятого, двадцятого виходів блока керування, а першим виходом - до четвертого його входу, сьомим, восьмим, дев'ятим входами - до четвертих виходів двигунів лівого борту, десятим, одинадцятим і дванадцятим - до четвертих виходів двигунів правого борту діагностичного робота, тринадцятим входом - до першого виводу двигуна відеокамери кольорового зображення, чотирнадцятим - до освітлювальних пристроїв, п'ятнадцятим - до других виводів двигуна пантографа, а шістнадцятим - до других виводів двигуна башти, другим і третім виходами - до першого і другого загальних проводів відповідно.
Текст
Система телеінспекції трубопроводів, що містить самохідний діагностичний робот в герметичному корпусі, складений з освітлювальних пристроїв, відеокамери кольорового зображення, розміщеної у головній його частині, на башті, оптично зв‘язаній з трансфокатором, перший вхід її з'єднаний з блоком живлення, перший вихід - з першим входом відеопідсилювача, другий вхід останнього підключений до блока живлення, а перший вихід - до кабелю, з'єднаному з першим входом і першим виходом блока живлення і першим входом і першим виходом блока керування, другі виходи відеокамери кольорового зображення і відеопідсилювача з'єднані з першим загальним проводом, другий ви хід блока керування підключений до входу трансфокатора, другий вхід - до блока кінцевих вимикачів, пристрій керування, живлення і візуалізації отриманої інформації складений з відеомагнітофона, перший вхід якого з'єднаний з першим виходом блока акумуляторів, а другий - з виходом знакогенератора і першим входом кольорового телевізора, другий вхід якого з'єднаний з виходом блока живлення телевізора, а вихід - з др угим входом знакогенератора, третій вхід останнього підключений до другого виходу блока акумуляторів, третій вихід якого з'єднаний з першим входом переносного комп'ютера, а четвертий - з першим входом блока живлення діагностичного робота, четвертий вхід знакогенератора підключений до входу датчика шляху, вихід останнього механічно зв'язаний з кабелем, останній з'єднаний з другим входом і виходом переносного комп'ютера, виходом блока живлення діагностичного робота, вбудованим багатоканальним електричним колектором лебідки і першим входом і першим виходом блока керування, яка відрізняється тим, що лебідка містить шасі, на якому на одній осі одна за одною розміщені лебідка кабельна консольна і лебідка тросова, а спереду кабельної лебідки встановлений ручний пантографічний кабелеукладач, у самохідний діагностичний робот введені датчик уклону, вихід якого підключений до третього входу блока керування, а вхід - до блока живлення, пантограф, встановлений на самохідному шасі і утримуючий башту і двигуни відеокамери кольорового зображення башти і пантографа, перші і другі, через резистори, входи яких приєднані до першого і другого ви ходів відповідних блоків керування, виконаних на мостовій схемі перемикання, перший вхід якої через резистор з'єднаний з другим її входом, між ним і третім входом ввімкнена перша оптронна розв'язка, причому третій вхід мостової схеми перемикання підключений до першого входу транзисторного перемикача, між входом і виходом якого ввімкнена друга оптронна розв'язка, причому катоди діодів оптронних розв'язок підключені до першого загального проводу, емітер транзистора другої оптронної розв'язки - до другого загального проводу, а перший і другий виходи мостової схеми перемикання - до якірних обмоток двигунів башти, пантографа і відеокамери кольорового зображення, другий вхід мостової схеми перемикання і входи оптронних розв'язок з'єднані з входами, а перший і другий виходи мостової схеми перемикання - з виходами блоків керування баштою, відеокамерою кольорового зображення і пантографом, перші входи останніх підключені до блока живлення, а другий і третій ви ходи - до третього, четвертого, п'ятого, шостого, сьомого і восьмого виходів блока керування, третій і четвертий виходи - до першого і другого загальних проводів відповідно, блок керування освітлювальними пристроями містить в собі мультивібратор з перестроюваною щілинністю імпульсів, перший вхід якого підключений до колектора транзистора і резистора, перший вихід - до анода діода оптронної розв'язки, колектор транзистора останньої з'єднаний з першим входом напівпровідникового реле і через резистор - з другим його входом, причому емітер транзистора, другий ви хід мультивібратора з перестроюваною щілинністю імпульсів, катод діода оптронної розв'язки підключені до першого загального проводу, а емітер транзистора оптронної розв'язки, другий ви хід напівпровідникового реле - до другого загального проводу, другий вхід мультивібратора з (19) (21) 2000074583 (22) 31.07.2000 (24) 15.08.2001 (46) 15.08.2001, Бюл. № 7, 2001 р. (72) Маслак Віктор Миколайович, Баранов Юрій Вячеславович, Бондар Анатолій Юрьйович, Петровський Артур Адамович (73) ВІДКРИТЕ АКЦІОНЕРНЕ ТОВАРИСТВО "ДОНВУГЛЕВОДОКАН АЛ" А (54) СИСТЕМА ТЕЛЕІНСП ЕКЦ ІЇ ТРУБОПРОВОДІВ 40855 перестроюваною щілинністю імпульсів, перший його вхід через резистор, база транзистора, другий вхід напівпровідникового реле є входами, а перший вихід напівпровідникового реле - виходом блока керування освітлювальними пристроями, який підключений першим і другим виходами до послідовно з'єднаних ламп освітлювальних пристроїв, першим і другим входами - до дев'ятого, десятого виходів блока керування, третім і четвертим входами - до блока живлення, третім і четвертим виходами - до першого і другого загальних проводів відповідно, двигуни лівого і правого борту, перший, другий, третій і четвертий через резистор, входи яких підключені відповідно до першого, другого, третього і четвертого виходів їх блоків керування, складених з мостової схеми перемикання, першим входом підключеної до колектора транзистора першої оптронної розв'язки, через резистор - до другого свого входу і до другого входу напівпровідникового реле, що через резистор з'єднаний з першим його входом, підключеним до колектора транзистора другої оптронної розв'язки, анод діода останньої з'єднаний з першим виходом мультивібратора з перестроюваною щілинністю імпульсів, перший вхід його підключений до колектора транзистора і резистора, причому емітер транзистора, другий вихід мультивібратора з перестроюваною щілинністю імпульсів, катоди діодів першої і другої оптронних розв'язок з'єднані з першим загальним проводом, емітери транзисторів оптронних розв'язок, вихід мостової схеми перемикання, другий вихід напівпровідникового реле - з другим загальним проводом, другий вхід мультивібратора з перестроюваною щілинністю імпульсів, перший його вхід через резистор, база транзистора, анод діода першої оптронної розв'язки, другий вхід напівпровідникового реле є входами, а перший вихід напівпровідникового реле, другий і третій виходи мостової схеми перемикання - виходами блоків керування двигунами лівого і правого борту, підключених першим і другим входами до блока живлення, третім, четвертим і п'ятим вхо дами відповідно - до одинадцятого, дванадцятого, тринадцятого, чотирнадцятого, п'ятнадцятого і шістнадцятого виходів блока керування, пристрій контролю, що містить багатовхідний мультиплексор, підключений одинадцятим, дванадцятим, тринадцятим і чотирнадцятим входами до емітерів транзисторів відповідно першої, другої, третьої, четвертої оптронних розв'язок, п'ятнадцятий його вхід з'єднаний з першим виходом стабілізатора напруги і другим входом мультивібратора з перестроюваною щілинністю імпульсів, перший вхід якого через перший фільтр нижніх частот підключений до шістнадцятого входу багатовхідного мультиплексора, а його вихід через п'яту оптронну розв'язку - до першого входу другого фільтра нижніх частот і через резистор - до другого входу мультивібратора з перестроюваною щілинністю імпульсів, причому колектори транзисторів першої, другої, третьої і четвертої оптронних розв'язок, перший вхід стабілізатора напруги підключені до блока живлення, аноди першої, другої, третьої, четвертої оптронних розв'язок, емітер транзистора п'ятої оптронної розв'язки, другий вихід другого фільтра нижніх частот з'єднані з першим загальним проводом, а емітери транзисторів першої, другої, третьої, четвертої оптронних розв'язок, катод діода п'ятої оптронної розв'язки, другий вихід стабілізатора напруги і другий вихід першого фільтра нижніх частот, ви хід багатовхідного мультиплексора - з другим загальним проводом, перші десять входів багатовхідного мультиплексора, аноди діодів першої, другої, третьої і четвертої оптронної розв'язки, перший вхід стабілізатора напруги є входами, а перший вихід і перший вхід через резистор другого фільтра нижніх частот виходами пристрою контролю, підключеного першим і другим вхо дами до блока живлення, третім, четвертим, п'ятим, шостим входами - до сімнадцятого, вісімнадцятого, дев'ятнадцятого, двадцятого виходів блока керування, а першим виходом - до четвертого його входу, сьомим, восьмим, дев'ятим входами - до четвертих ви ходів двигунів лівого борту, десятим, одинадцятим і дванадцятим - до четвертих виходів двигунів правого борту діагностичного робота, тринадцятим вхо дом - до першого виводу двигуна відеокамери кольорового зображення, чотирнадцятим - до освітлювальних пристроїв, п'ятнадцятим - до других виводів двигуна пантографа, а шістнадцятим до других виводів двигуна башти, др угим і третім виходами - до першого і другого загальних проводів відповідно. ____________________ Винахід відноситься до каналізації і водопостачання, а саме, до труб і трубопроводів загального призначення і може застосовуватися для виявлення дефектів внутрішньої поверхні трубопроводів. Відома апаратура перевірки трубопроводів [1], що містить оптичну частину, зв'язану з телевізійною камерою, що керується електронною частиною, причому оптична і електронна частини поділені, але зв'язані зігнутою деталлю для пересування телевізійної камери по трубопроводу прямуючи за його ви гинами. До недоліків апаратури слід віднести відсутність освітленості, що не забезпечує належної ви димості, трудність ідентифікації вигляду і міри дефекту стінки трубопроводу із-за того, що те левізійна камера чорно-білого зображення, немає можливості подолання перешкод у трубопроводі, обмежений огляд камери, відсутність діагностування стану са мого візка, можливості отримання збільшеного зображення окремого дефекту, ста білізації живильних напруг у візку, компенсації відеосигналу камери і контролю робочого стану віз ка. Відомий пристрій для внутрішнього контролю трубопроводів [2], що містить візок з встановленим на ньому з можливістю обертання корпусом, що охоплює камеру, у якому розміщений додатковий вантаж, що утримує камеру у вертикаль 2 40855 ному положенні, освітлювальний пристрій, встановлений на передньому кінці візка і струмопідвід, розміщений на його задньому кінці і з'єднаний з живильним кабелем, що закріплений на тяговому тросі, що протягує пристрій через трубопровід, монітор, що отримує сигнали з камери. Недоліками згаданого пристрoю є те, що він виконаний не самохідним, а це ускладнює подолання перешкод у тр убі, містить камеру чорнобілого зображення, що уск ладнює ідентифікацію вигляду і ступеня дефекту тр убопроводу, неможливо продіагностувати стан са мого візка, немає можливості зміни освітленості, що не забезпечує належної видимості, неможливо отримати збільшеного зображення окремого дефекту, відсутні стабілізація живильних напруг у візку, компенсація відеосигналу у камері і контроль робочого ста ну візка. Відома система контролю труб [З], у склад якої входять зонд з відеокамерою, лампами освітлення і пристроями перетворення сигналу, парашут, кабель, суміщений з оптоволоконним кабелем, механічний пристрій введення, з'єднаний з гідравлічним насосом через керуючий пристрій введення і підключений до пристрою керування, зв'язаного з відеомагнітофо ном, монітором і датчиком шляху. Недоліки означеної системи наступ ні: -застосування тільки у тр убах малого діаметру; -неможливість застосуван ня у трубопроводах з ве ликими відкладеннями на стінках; -мала поверхня огляду із-за нерухо мості камери: "Униз/Уверх", "Ліворуч/П раворуч"; -трудомісткo витягати зонд з труби. Найбільш близьким до винаходу є пристрій для виявлення стиків, тріщин та інших аналогічних дефектів у водопровідних тр убах [4], складений з візка з приводом і відеокамерой, встановленою на ньому і забезпеченою радіальнo орієнтованою відносно поздовжньої осі оптичною систе мою, дистанційного приводу, що керуєть ся і допускає кутові переміщен ня відеокамери, датчика кутового повороту останньої, з'єднаного з індикатором, модуля прицілювання, що дозволяє фіксувати її положення відносно об'єкту. До недоліків пристрою слід віднести: - відсутність можливості подолання перешкод у тр убопроводі; -відсутність освітленості, що не забезпечує належної видимості; -трудність ідентифікації вигляду та міри дефекту стінки трубопроводу із-за того, що ві деокамера чорно-білого зображення; -відсутність можливості отримання збільшеного зображення дефекту-визначення куту уклону трубопроводу, ста білізації живлення візка, зміни вста новлення відеокамери відносно поздовжньої осі трубопроводу, контролю робочого стану візка. головній його частині, на башті, оптично зв'язаній з трансфо катором, перший вхід її з'єднаний з блоком живлення, перший вихід - з першим вхо дом відеопідсилювача, др угий вхід останнього підключений до блока живлення, а перший вихід - до кабелю, з'єднаному з першим вхо дом і першим виходом блока живлення і першим вхо дом і першим виходом блока керування, другі виходи відеокамери кольорового зображення і відеопідсилювача з'єднані з першим загальним проводом, другий вихід блока керуван ня підключений до входу трансфо катора, другий вхід - до блока кінцевих ви микачів, пристрій керуван ня, живлення і візуалізації отриманої інформації, складений з відеомагнітофону, перший вхід якого з'єднаний з першим входом блока акумуляторів, а другий - з ви ходом знакогенератора і першим вхо дом кольорового телевізора, другий вхід якого з'єднаний з виходом блока живлення телевізора, а вихід - з др угим входом знакогенератора, третій вхід останнього підключений до другого виходу блока акумуляторів, третій вихід якого з'єднаний з першим вхо дом переносного комп'ютера, а четвертий - з першим вхо дом блока живлення діагностичного робота, четвертий вхід знакогенератора підключений до вхо ду датчика шляху, ви хід останнього механічно зв'язаний з кабелем, останній з'єднаний з другим вхо дом і виходом переносного комп'ютера, виходом блока живлення діагностичного робота, вбудованим багато канальним електричним колектором лебідки і першим входом і першим виходом блока керування, у відповідності з винаходом, лебідка містить шасі, на якому на одній осі одна за одною розміщені лебідка кабельна консольна і лебідка тросова, а спереду кабельної лебідки встановлений ручний пантографічний кабелеукладач, у са мохідний діагностичний робот вве дені датчик уклону, ви хід якого підключений до третього входу блока керування, а вхід - до блока живлення, пантограф, встановлений на самохідному ша сі і утримуючий башту, і двигуни відеокамери кольорового зображення, башти і пантографа, перші і другі, через резистор, входи якого приєднані до першого і другого виходів відповідних бло ків керуван ня, виконаних на мосто вій схемі перемикання, перший вхід якої, через резистор, з'єднаний з другим її вхо дом, між ним і третім входом ввімкнена перша оптронна розв'язка, причому третій вхід мостової схе ми підключений до першого вхо ду транзисторного перемикача, між входом і виходом якого ввімкнена друга оптронна розв'язка, причому катоди діодів оптронних розв'язок підключені до першого загального проводу, емітер транзистора другої оптронної розв'язки - до другого загального проводу, а перший і другий виходи мостової схеми перемикання - до якірних обмоток двигунів башти, пантографа і ві деокамери кольорового зображення, другий вхід мостової схе ми перемикання і входи оптронних розв'язок з'єднані з входами, а перший і другий ви ходи мостової схеми перемикання з виходами блоків керування баштою, відеокамерою кольорового зображення і пантографом, перші вхо ди останніх підключені до блока живлення, а другий і третій входи - до третього, четвертого, п'ятого, шосто го, сьомого і восьмого ви ходів блока керування, третій і четвертий виходи - до першого і другого загальних проводів відповідно, блок ке Задачею винаходу є розширення функціональних можливостей і підвищен ня надійності. Поставлена задача вирішується тим, що у системі телеінспекції трубопроводів, що містить самохідний діагностичний робот у герметичному корпусі, складений з освітлювальних пристроїв, відеокамери кольорового зображення, розміщеної у 3 40855 рування лампами, включаючий у се бе мультивібратор з перестроюваною шпаруватістю імпульсів, перший вхід якого підключений до колектору транзистора і резистору, перший вихід - до аноду діода оптронної розв'язки, колектор транзистора останньої з'єднаний з першим вхо дом напівпровідникового реле і, через резистор - з другим його вхо дом, причому емітер транзистора, другий вихід мультивібратора з перестроюваною шпарува тістю імпульсів, катод діода оптронної розв'язки підключені до першого загального проводу, а емітер транзистора оптронної розв'язки, другий вихід на півпровідникового реле - до другого загального проводу, другий вхід мульти вібратора з перестроюваною шпарува тістю імпульсів, перший його вхід, через резистор, база транзистора, другий вхід напівпровідникового реле - виходом блока керування лампами, і підключений першим і другим вихода ми до послідовно з'єднаних ламп освітлювального пристрою, першим і другим вхо дами - до дев'ятого і десятого виходів бло ка керування, третім і четвертим виходами - до першого і другого загальних проводів відповідно, двигуни лівого і правого борту, перший, другий, третій і четвертий, через резистор, входи яких підключені відповідно до першого, другого, третього і четвертого ви ходів їх блоків керування, складених з мостової схе ми перемикання, першим вхо дом підключеній до колектору транзистора першої оптронної розв'язки, через резистор - до другого свого входу і до другого вхо ду напівпровідникового реле, що через резистор, з'єднаний з першим його вхо дом, підключеним до колектору транзистора другої оптронної розв'язки, анод діода останньої з'єднаний з першим виходом мультивібратора з перестроюваною шпарува тістю імпульсів, перший вхід його підключений до колектору транзистора і резистору, причому емітер транзистора, другий вихід мультивібратора з перестроюваною шпарува тістю імпульсів, катоди діодів першої і др угої оптронних розв'язок з'єднані з першим загальним проводом, емітери транзисторів оптронних розв'язок, вихід мостової схеми перемикання, другий вихід напівпровідникового реле - з другим загальним проводом, другий вхід мультивібратора з перестроюваною шпарува тістю імпульсів, перший його вхід че рез резистор, база транзистора, анод діода першої оптронної розв'язки, другий вхід напівпровідникового реле з'являються вхо дами, а перший вихід напівпровідникового реле, другий і третій виходи мостової схеми перемикання - виходами блоків керування двигуна ми лівого і правого бортів, і підключений першим і другим вхо дами до блока живлення, третім, четвертим і п'ятим вхо дами відповідно до одинадцятого, два надцятого, тринадцятого, чо тирнадцятого, п'ятнадцятого і шістнадцятого виходам блока керування, пристрій контролю, що містить багатовхідний мультиплексор, підключений одинадцятим, дванадцятим, тринадцятим і чотирнадцятим входами до емітерів транзисторів відповідних першої, другої, третьої і четвертої оптронних розв'язок, п'ятнадцятий його вихід з'єднаний з першим виходом стабілізатора напруги і другим входом мультивібратора з перестроюваною шпарува тістю імпульсів, перший вхід якого через перший фільтр нижніх частот підключений до шістнадцятого входу багатовхідного мультиплексора, а його вихід че рез п'яту оптрону розв'язку - до першого вхо ду другого фільтру нижніх частот и через резистор - до другого вхо ду мульти вібратора з перестроюваною шпарува тістю імпульсів, причому колектори транзисторів першої, другої, третьої і четвертої оптронних розв'язок, перший вхід ста білізатора напруги підключені до блока живлення, аноди першої, другої, третьої, четвертої оптронних розв'язок, емітер транзистора п'ятої оптронної розв'язки, другий вихід другого фільтру нижніх частот з'єднані з першим загальним проводом, а емітер транзисторів першої, др угої, третьої і четвертої оптронних розв'язок, катод діода п'ятої оптронної розв'язки, другий вихід ста білізатора напруги і другий вихід першого фільтру нижніх частот, вихід багатовхідного мультиплексора - з другим загальним проводом, перші десять входів багатовхідного мультиплексора, аноди діодів першої, др угої, третьої і четвертої оптронної розв'язки, перший вхід стабілізатора напруги з'являються входами, а перший вихід і перший вхід, через резистор, другого фільтру нижніх частот - вихода ми пристрою контролю, підключений першим і другим входами до блока живлення, третім, четвертим, п'ятим, шостим входами - до сімнадцятого, ві сімнадцятого, дев'ятнадцятого, двадцятого ви ходів блока керування, а першим виходом - до четвертого його входу, сьомим, восьмим, дев'ятим вхо дами -до четвертих вхо дів двигунів лі вого борту, десятим, одинадцятим і дванадцятим - до четвертих ви ходів двигунів правого борту діагностичного робота, тринадцятим вхо дом - до першого виводу двигуна відеокамери кольорового зображення, чотирнадцятим - до пристрою освітлення, п'ятнадцятим - до другого виводу дви гуна пантографа, а шістнадцятим - до другого виводу дви гуна башти, другим і третім виходами - до першого і другого загальних проводів відповідно. Виконання лебідки у вигляді двох лебідок: кабельної консольної і тросової, розта шованих на одній осі, на шасі одна за одною та встановлення спереду кабельної консольної лебідки кабелеукладача, дозволило забезпечити вигоду у експлуатації, збільшити її функціональні можливості, а також зменши ти матеріалоємність. Введення у самохідний діагностичний робот наступних вуз лів, а саме: -датчика уклону - доз волило визначати фактичні кути залягання трубопроводу по усій довжині; -пантографа, вста новленого на самохідному шасі - розта шовувати блок відеокамери співвісно з центральною віссю тр убопроводу; -двигунів ві деокамери, башти, пантографа з керуючими ними блоками -проводити діагностику трубопроводу в усіх напрямках; -блока керуван ня освітлювальними пристроями - підви щити ефективність і вірогідність діагности ки; - двигунів правого і лівого бортів з їх блоками керуван ня - забезпечити можливість руху і маневрування у тр убопроводі; -пристрою контролю - забезпечити оперативне визначення стану діагностичного робота. Конструктивне рішення лебідки, введення у самохідний діагностичний робот датчика уклону, пантографа, дви гунів ві деокамери, башти, пантографа з керуючими ними блоками, блока керування 4 40855 освітлювальними пристроями, двигунів правого і лівого борту з їх блоками керуван ня і пристрою контролю, а та кож їх зв'язків з схемою системи у цілому дозволили вирішити поставлену задачу: підвищення надійності і розширення функціональних можливостей. На фіг. 1 наведена блок - схема самохідного діагностичного робота; На фіг. 2 - блок-схема пристрою керування, живлення, візуалізації отриманої інфор мації; На фіг. З - електрична схема блока керування баштою, пантографом і відеокамерою кольорового зображення; На фіг. 4 - електрична схема керування двигуна ми лівого і правого бортів діагностичного робота; На фіг 5 - електрична схема блока керування освітлювальними пристроями (лампами); На фіг. 6 - електрична схема пристрою контролю. Систе ма телеінспекції трубопроводів містить самохідний діагностичний робот у герметичному корпусі 1 і пристрій керуван ня, живлення і візуалізації отриманої інформації 2. Самохідний діагностичний робот у гер метичному корпусі 1 складений з трансфо катора 3, відеокамери кольорового зображення 4, відеопідсилювача 5, блока кінцевих ви микачів 6, датчика уклону 7, двигуна башти 8, блока керування баштою 9, двигунів лі вого борту 10 самохідного діагностичного робота, блока керування двигуна ми лівого борту 11, освітлювальних пристроїв 12 (ламп Е1, Е2), блока керування освітлювальними пристроями 13, двигуна пантографа 14, блока керуван ня пантографом 15, пристрою контролю 16, блока керування 17, двигуна відеокамери кольорового зображення 18, блока керування відеокамерою кольорового зображення 19, двигунів правого борту 20 самохідного діагностичного робота, блока керування двигуна ми правого борту 21 і блока живлення 22. Пристрій керування, живлення і візуалізації отриманої інформації 2, включає у се бе механічний блок 23, датчик шляху 24, переносний комп'ютер 25, блок живлення діагностичного робота 26, блок акумуляторів 27, блок живлення кольорового телевізора 28, знакогенератор 29, відеомагнітофон 30, кольоровий телевізор 31, кабель 32, страхуючий трос 33, лебідку 34, складену з лебідки кабельної консольної 35, лебідки тросової 36, ручний привід з храповим механізмом 37, вбудований багатоканальний електричний колектор 38, ручний пантографічний укладач 39. Блоки керуван ня відеокамерою кольорового зображення 19, баштою 9, пантографом 15 складені з мостової схе ми 40, транзисторного перемикача 41, резистора R11, оптронних розв'язок V1 R12, V2 - R13. Блоки керування двигуна ми лівого 11 і правого 21 бортів самохідного діагностичного робота 1 містять мультивібратор з перестроюваною шпарува тістю імпульсів 42, мостову схе му перемикання 43, напівпровідникове реле 44, оптронні розв'язки V3-R15, V5-R17, транзистор V4, резистори R14, R16, R18. Блок керування освітлювальними пристроями 13 включає у се бе мультивібратор з перестроюваною шпарува тістю імпульсів 45, напівпровідникове реле 46, оптронну розв'язку V R20, транзистор V6, резистори R19, R21. Пристрій контролю складений з стабілізатора напруги +15В 47, першого фільтру нижніх частот 48, мультивібратора з перестроюваною шпаруватістю імпульсів 49, другого фільтру нижніх частот 50, багатовхідного мультиплексора 51, п'яти оптронних розв'язок V8 - R22, V9-R24, V10 -R26, VII - R28, V12 - R30, резисторів R23, R25, R27, R29, R31. Відеокамера кольорового зображення 4 оптично зв'язана з трансфокатором З, перший вхід її з'єднаний з блоком живлення 22, перший ви хід - з першим вхо дом відеопідсилювача 5, другий вхід останнього підключений до блока живлення 22, а перший вихід - до кабелю 32, з'єднаному з першим вхо дом і першим виходом блока живлення 22 і першим вхо дом і першим виходом блока керування 17, другі виходи ві деокамери 4 і відеопідсилювача 5 з'єднані з першим загальним проводом 1 "заг. 1", др угий вихід бло ка керуван ня 17 підключений до вхо ду трансфокатора 3, другий вхід - до блока кінцевих вимикачів 6. Відеомагнітофон 30, першим входом з'єднаний з першим виходом блока акумуляторів 27, а другим - з виходом знакогенератора 29 і першим вхо дом кольорового те левізора 31, другий вхід якого з'єднаний з виходом блока живлення кольорового те левізора 28, а вихід - з другим входом знакогенератора 29, третій вхід останнього підключений до другого виходу бло ка акумуляторів 27, третій вихід якого з'єднаний з першим вхо дом переносного комп'ютера 25, а четвертий - з першим вхо дом блока живлення діагностичного робота 26, четвертий вхід знакогенератора 29 підключений до вхо ду датчика шляху 24, вихід останнього механічно зв'язаний з кабелем 32, останній з'єднаний з другим входом і виходом переносного комп'ютера 25, виходом блока живлення діагностичного робота 26, вбудованим багатоканальним електричним колекто ром лебідки 38 і першим входом і першим виходом блока керування 17. Датчик уклону 7, вихід якого підключений до третього вхо ду блока керування 17, а вхід - до блока живлення 22. Двигуни відеокамери кольорового зображення 18, башти 8, пантографа 14, перші і другі через відповідні резистори R1, R3, R4, входи яких приєднані до першого і другого виходів відповідних блоків керування 9,15, 19, у яких перший вхід мостової схеми перемикання 40, через резистор R11, з'єднаний з другим її входом, між ним і третім вхо дом ввімкнена перша оптронна розв'язка V1 - R12, причому третій вхід мостової схеми перемикання 40 підключений до першого входу транзисторного перемикача 41, між вхо дом і виходом якого ввімкнена друга оптронна розв'язка V2-R13, причому катоди діодів оптронних розв'язок V1 - R12, V2-R13 підключені до першо го загального проводу 1 ("заг. 1"), емітер транзистора другої оптронної розв'язки V2 R13 - до другого загального проводу 2 ("заг. 2"), а перший і другий виходи мостової схе ми перемикання 40 - до якірних обмоток двигунів башти 8, пантографа 14 і відеокамери кольорового зображення 18, другий вхід мостової схе ми перемикання 40 і входи оптронних розв'язок V1 - R12, V2-R13 з'єднані з входами, а перший і другий виходи мостової схе ми перемикання 40 - з виходами блоків керування баштою 9, пантографом 15 і відеокамерою кольорового зображення 18, перші вхо ди ос 5 40855 танніх підключені до блока живлення 22, а другий і третій входи - до третього, четверто го, п'ятого, шостого, сьомого і восьмого ви ходів блока керування 17, третій і четвертий ви ходи - до першого 1 ("заг. 1") і др угого 2 ("заг. 2") загальним проводам відповідно, у блока керування освітлювальними пристроями 13 мульти вібратор з перестроюваною шпарува тістю імпульсів 45 першим входом підключений до колектору транзистора V6 і резистору R19, перший вихід - до аноду діода оптронної розв'язки V7 - R20, колектор транзистора останньої з'єднаний з першим вхо дом напівпровідникового реле 46 і через резистор R21 - з другим його вхо дом, причому емітер транзисто ра V6, другий вихід мультивібратора з перестроюваною шпарува тістю імпульсів 45, катод діода оптронної розв'язки V7 - R20 підключений до першо го загального проводу 1 ("заг. 1"), а емітер транзистора оптронної розв'язки V7 - R20, другий вихід напівпровідникового реле 46 - до другого загального проводу 2 ("заг. 2"), др угий вхід мультивібратора з перестроюваною шпаруватістю імпульсів 45, перший його вхід через резистор R19, база транзистора V6, др угий вхід напівпровідникового реле 46 являються вхо дами, а перший вихід напівпровідникового реле - виходом блока керування освітлювальними пристроями 13, і підключений першим і другим виходами до послідовно з'єднаних освітлювальних пристроїв 12 (ламп Е1, Е2), першим і другим вхо дами - до дев'ятого, де сятого ви ходів блока керування 17, третім і четвертим вхо дами до блока живлення 22, третім і четвертим виходами - до першого 1 ("заг. 1") і др угого 2 ("заг. 2") загальним проводам відповідно. Перший, другий, третій і четвертий через резистор R5 - R10, входи яких підключені відповідно до першо го, другого, третього і четвертого ви ходів їх блоків керування 11,21, мостова схема перемикання 43 яких першим входом підключена до колекто ру транзистора першої оптронної розв'язки V3 - R15, через резистор R16 - до другого свого вхо ду і до другого вхо ду напівпровідникового реле 44, що через резистор R18 з'єднаний з першим його вхо дом, підключеним до колектору транзистора другої оптронної розв'язки V5 R17, анод діода останньої з'єднаний з першим виходом мультивібратора з перестроюваною шпарува тістю імпульсів 42, перший вхід його підключений до колектору транзистора V4 і резистору R14, причому емітер транзистора V4, др угий вихід мультивібратора з перестроюваною шпарува тістю імпульсів 42, катоди діодів першої V3 - R15 і другої V5 - R17 оптронних розв'язок з'єднані з першим загальним проводом 1 ("заг. 1"), емітери транзисторів оптронних розв'язок V3 - R15, V5 - R17, вихід мостової схеми перемикання 43, другий вихід напівпровідникового реле 44 - з другим загальним проводом 2 ("заг. 2"), др угий вхід мульти вібратора з перестроюваною шпарува тістю імпульсів 42, перший його вхід через резистор R14, база транзистора V4, анод діода першої оптронної розв'язки V3 - R15, другий вхід напівпровідникового реле 44 з'являються вхо дами, а перший ви хід напівпровідникового реле 44, другий і тре тій виходи мостової схе ми перемикання 43 -виходом блоків керування двигуна ми лівого 11 і правого 21 бортів самохідного діагностичного робота 1, і підключений першим і другим вхо дами до блока живлення 22, третім, четвертим і п'ятим входами відповідно - до одинадцятого, два надцятого, три надцятого, чо тирнадцятого, п'ятнадцятого, і шістнадцятого виходам блока керуван ня 17. У пристрою контролю16 багатовхідний мультиплексор 51 підключений одинадцятим, дванадцятим, тринадцятим і чотирнадцятим вхо дами до емітерів транзисторів відповідних першої V8 - R22, другої V9 - R24, третьої V10 - R26, четвертої V11 - R28 оптронних розв'язок, п'ятнадцятий його вхід з'єднаний з першим виходом стабілізатора напруги +15В 47 і другим входом мульти вібратора з перестроювагою шпаруватістю імпульсів 49, перший вхід якого через перший фільтр нижніх частот 48 підключений до шістнадцятого вхо ду ба гатовхідного мультиплексора 51, а його вихід через п'яту оптрону розв'язку V12 R30 - до першо го входу др угого фільтру нижніх частот 50 і че рез резистор R31 - до другого входу мультивібратора з перестроюваною шпарува тістю імпульсів 49, причому колекто ри транзисторів першої V8 - R22, другої V9 - R24, третьої V10 - R26, четвертої V11-R28 оптронних розв'язок, перший вхід стабілізатора напруги +15В 47 підключені до блока живлення 22, аноди першої V8 - R22, другої V9 - R24, третьої V10 - R26, четвертої V11 - R28 оптронних розв'язок, емітер транзистора п'ятої V12 - R30 оптронної розв'язки, другий вихід другого фільтру нижніх частот 50 з'єднані з першим загальним проводом 1 ("заг. 1"), а емітер транзисторів першої V8 - R22, другої V9 - R24, третьої V10 R26, четвертої V11 - R28 оптронних розв'язок, катод діода п'ятої оптронної розв'язки V12 - R30, другий вихід стабілізатора напруги +15В 47 і другий вихід першо го фільтру нижніх частот 48, ви хід багатовхідного мультиплексора 51 - з другим загальним проводом 2 ("заг. 2"), перші десять входів багатовхідного мультиплексора 51, аноди діодів першої V8 - R22, другої V9-R24, третьої V10 - R26, четвертої V11 -R28 оптронної розв'язки, перший вхід ста білізатора напруги +15В 47 з'являються вхо дами, а перший вихід і перший вхід, через резистор R31, другого фільтру нижніх частот 50 - виходами пристрою контролю 16, підключений першим і другим вхо дами до блока живлення 22, третім, четвертим, п'ятим, шостим вхо дами - до сімнадцятого, вісімнадцятого, дев'ятнадцятого, двадцятого ви ходів блока керування 17, а першим виходом - з четвертим його вхо дом, сьомим, восьмим, дев'ятим входами - з четвертими виходами двигунів лі вого борту 10, десятим, одинадцятим і дванадцятим - з четвертими вихода ми двигунів правого борту 20 самохідного діагностичного робота 1, тринадцятим вхо дом - з першим виводом двигуна ві деокамери кольорового зображення 18, чотирнадцятим - з освітлювальними пристроями 12, п'я тнадцятим - з другим виводом двигуна пантографа 14, а шістнадцятим - з другим виводом двигуна башти 8, другим і третім виходами - з першим 1 ("заг. 1") і другим 2 ("заг. 2") загальними проводами відповідно. У систе му телеінспекції трубопроводів входять покупні блоки, такі як: трансфо катор 3 типу Motorized ZOOM LENS, блок кінцевих ви микачів 6 типу МТ1, блок акумуляторів БА кк 27 являє собою вісім батарей 6СТ-132, відеомагнітофон 30, кольоровий телевізор 31, переносний комп'ютер 25, дви 6 40855 гуни ти пу МН-145А, а також взяті з науково-технічної або патентної документації - це: -відеопідсилювач 5 - Аналогові і цифрові інтегральні мікросхе ми. Під редак. С. В. Якубовського. М.: Радіозв'язок, 1985г., с. 335, рис. 6.61; -блок керування 17 - Довідник. Вироби і компоненти, що пропонуються фірмою "КГЦ - МК". Мікроконтролери фірми ATMEL родини AVR; -блок живлення телевізора 28 і блок живлення 22 - Мистецтво схемотехники; у 2-х то мах, т. 1, переклад з англійської, вид. З, сте реотип. - М.: МИР, 1986г, с. 347 рис. 5.41, -знакогенератор 29-Любительські телевізійні ігри. Овічкін М. А.,-М.: Ра діозв'язок, 1985г. с. 19, рис. 31; -блок живлення діагностичного робота 26 -Джерела електроживлення радіоелектронної апаратури, Довідник, Г. С. Найвельт, К. Б. Мазель і ін., під ред. Г. С. Найвельта,-М.: Ра діозв'язок, 1986г,с. 323, рис. 8.16; -датчик уклону 7 - Авторське свідоцтво СРСР№606100, кл. G01C 9/12, опублік. 07.04.78,бюл.№17; -мостова схе ма перемикання 40, 43 - Джерела електроживлення радіоелектронної апаратури, Довідник, Г. С. Найвельт, К. Б. Мазель і ін., під ред. Г. С. Найвельта, -М.: Радіозв'язок, 1986г,с. 407, рис. 10.4; -транзисторний перемикач 41 - Мистецтво схе мотехники, у 2-х то мах, т. 1, пе реклад з англійської, вид. 3-е, стереотип, - М.: МИР, 1986г., с. 91, рис. 2.3; -мультивібратор з перестроюваною шпарува тістю імпульсів 45 – Мікроелектронні засоби обробки аналогових сигналів, Ко ломбет Є. А. - М.: Радіозв'язок, 1991г, с. 206, рис. 7.19; -напівпровідникове реле 46 - Напівпровідникові оптоелектронні прилади: Довідник, В. І. Іванов, А. І. Аксьонов, А. М. Юшин, 2-е видання, перероб. і допов. - М.: Енергоатомвидав, 1989г., с. 365, рис. 10.8; -багатовхідний мультиплексор 51 - Популярні цифрові мікросхе ми, Довідник, 2-е вид. виправлено, - М.: Радіозв'язок, с. 230, рис. 2.28 (Масова радіобібліотека, вип. 1145); -фільтр нижніх частот 48, 50 - Мистецтво схе мотехніки, у 2-х томах, т. 1, переклад з англійської, вид. 3-е, стереотип, - М.: МИР, 1986г.,с. 58, рис. 1.54; -стабілізатор напруги +158 47 - Практичне керівництво по розрахункам схем у електроніці, Довідник, у 2-х томах, т. 1, переклад з англійської, під ред. Ф. Н Покровського, - М.: Энергоатомвидав, 1991г., с. 218, рис. 10.10; -блок кінцевих вимикачів 6 - Авторське свідоцтво СРСР №397754, кл. G01D5/32, опубліков. 17.09. 73, бюл. №37 і залежне від нього авторське свідоцтво СРСР №532760, кл. G01D5/32, опубліков. 25.10. 76, бюл.№ 39. регістрів і чарунок оперативно-запaм'ятовуючого пристрою (ОЗУ) ЦПУ блока керуван ня 17, а також установка параметрів зв'язку по послідовному каналу протоколу RS-232C с персональним комп'ютером 25 і установка у початковий стан регістрів блока керування 17. Після повернення з підпрограми ініціалізації починається виконання підпрограми діагностики. ЦПУ блока керування 17 визначає значення живильних напруг: +5В;+15В;+12В;-15В, що подаються через дільники напруг на вхо ди багатоканального вбудованого у ЦПУ аналого-цифрового перетворювача (АЦП). Якщо живильні напруги відсутні або відхи лені від заданих меж, ЦПУ блока керування 17 передає їх ве личини по послідовному каналу у персональний комп'ютер 25 і описана послідовність дій повторюється до прийняття рішення оператора про виключення самохідного діагностичного робота 1 і усунення несправності. Якщо значення живильних напруг у нормі, вони запам'ятаються у визначених чарунках вбудованого у ЦПУ ОЗУ і система приступає до діагности ки освітлювальних пристроїв (ламп) 12 і блока керуван ня освітлювальними пристроями 13. Відбувається включення освітлювальних пристроїв 12, при цьому на вхід бази транзистора V6 з виходу блока керування 17 подається рівень логічного нуля, транзистор V6 закривається, що приводить до проходження напруги Uцап ламп з виходу блока керування 17 на перший вхід мультивібратора з перестроюваною шпарува тістю імпульсів 45 через резистор R19, на другий вхід якого подається живильна напруга+15В. З виходу блока керування 17 за Зс. подається лінійно наростаюча напруга Uцап ламп від 0В до +5В на перший вход блока керування освітлювальними пристроями 13. Ця напруга через резистор R19 надхо дить на перший вхід мультивібратору з перестроюваною шпарува тістю імпульсів 45. У залежності від величини напруги Uцап ламп на виході мультивібратора з перестроюваною шпаруватістю імпульсів 45 ге нерується імпульсна напруга зі шпаруватістю відповідній напрузі Uцап ламп, що надхо дить на анод діода оптрона V7. Ця напруга перетворюється у світловий сигнал, що приводить до спрацьовуван ня транзистору оптрона V7, з колектора якого імпульсна, гальванічнo розв'язана, напруга надхо дить на перший вхід напівпровідникового реле 46. На другий вхід останнього подається живильна напруга+27В. Гальванічно розв'язана імпульсна напруга відповідна Uцап ламп знімається з виходу напівпровідникового реле 46 і подається на послідовно з'єднані освітлювальні пристрої 12.У слідстві інерційності останніх во ни водночас виконують інтегрування напруги, що надхо дить. Таким чином, змінювання напруги Uцап ламп веде до змінювання шпаруватості импульсів мультивібратора з перестроюваною шпарува тістю імпульсів 45 і, як слідство, змінювання сили світла освітлювальних пристроїв 12. Сигнал з загального проводу 1 ("заг.1") подається на емітер транзистора V6, другий вихід мультивібратора з перестроюваною шпарува тістю імпульсів 45 і катод діода оптрона V7. Сигнал з загального проводу 2 ("заг.2") подається на емітер транзистора оптрона V7 і на другий вихід напівпровідникового реле 46. Оптрон V7 забезпечує Працює система телеінспекції тр убопроводів наступним образом. При включенні живлення діагностичного робота 1 центральний процесорний пристрій (ЦПУ) блока керування 17 автоматично скидуєть ся і починає виконуватися підпрограма ініціалізації. Відбувається установка у початковий стан вн утрішніх 7 40855 гальванічну розв'язку керуючих напруг Uцап ламп і Uвмик/вимик останніх від силових ланцюгів. З виходу бло ка керування 17 подається кодова посилка 0111 на шину К3-К0, що надхо дить на аноди діодів оптронів V8-V11 відповідно. З емітера транзистора оптрона V8 знімається рівень логічного нуля, а з емітерів транзисторів оптронов V9 -V11 знімається рівень логічної одиниці, що відповідає гальванічнo розв'язаному коду 0111, що надхо дить на одинадцятий, дванадцятий, тринадцятий і чотирнадцятий вхо ди багатовхідного мультиплексора 51 відповідно. При цьому напруга, що знімається з резистора R2 (датчика струму R2) відповідає струму, що споживається освітлювальними пристроями 12 (лампами Е1, Е2) послідовно з'єднаними з ним і через багатовхідний мультиплексор 51 подається на перший вхід першого фільтру нижніх частот 48, у якому вхідний сигнал інтегрується і подається на перший вхід мультивібратора з перестроюваною шпаруватістю імпульсів 49. Шпарува тість импульсів останнього пропорційна вихідній напрузі першого фільтру нижніх частот 48. Вихідні імпульси мультивібратора з перестроюваною шпарува тістю імпульсів 49 подаються на анод оптрона V12 і перетворюються у світловий потік, від чого забезпечується гальванiчна розв'язка між силовими ланцюгами і ланцюгами вимірювання. З колектора транзистора V12 гальва нічнo розв'язані імпульси надходять на перший вхід другого фільтру нижніх частот 50, де вони інтегруються у напругу U ацп, а остання подається на другий вхід бло ка керуван ня 17. Напруга +27В надхо дить на вхід стабілізатору напруги +15В 47, де вона перетворюється у напругу +15В і з першого його виходу подається на п'ятнадцятий вхід багатовхідного мультиплексора 51, на другий вхід мультивібратора з перестроюваною шпаруватістю імпульсів 49 і,через резистор R31, на колектор транзистора оптрона V12. Сигнал з другого ви ходу ста білізатора напруги +15В 47, з другого ви ходу першого фільтру нижніх частот 48, з катоду діода оптрона V12, з другого виходу ба гатовхідного мультиплексора 51 і виводів резисторів R23, R25, R27, R29 подається на загальний провід 2 ("заг. 2") системи. Сигнал з другого виходу др угого фільтру нижніх частот 50, емітера транзистора V12 і катодів діодів оптронов V8 - V11 подається на загальний провід 1 ("заг. 1") систе ми. Напруга Uацп пропорційна струму, що споживається освітлювальними пристроями 12, гальванічнo розв'язана від силових ланцюгів, подана на вхід ба гатоканального вбудованого у ЦПУ АЦП. ЦПУ виробляє визначене значення струму, що споживається освітлювальними пристроями 12. Якщо це значення рівно нулю або перевищує задане програмою аварійне значення, блок керування 17 вимикає освітлювальні пристрої 12 шляхом подачі рівня логічної одиниці на вхід "Вмик./Вимик." блока керування освітлювальними пристроями 13. При цьому транзистор V6 відкривається, блокуючи тим самим надходження напруги Uцап ламп з виходу блока керування 17, бо на першому вхо ді мультивібратора з перестроюваючей шпарува тістю імпульсів 45 фіксується нульова напруга. Отже, імпульсна напруга мультивібратора з перестроюваною шпарува тістю імпульсів 45 не ви робляється, оптрон V7 замкнутий, напівпровідникове реле 46 отключено, освітлювальні пристрої 12 не горять. ЦПУ блока керування 17 передає по послідовному каналу у переносний комп'ютер 25 значення струму, що споживається освітлювальними пристроями Е1, Е2 і аварійного коду діагностики освітлювальних пристроїв 12 і блока керування освітлювальними пристроями13. Якщо значення струму, що споживається освітлювальними пристроями Е1, Е2 більше нуля і менше аварійного значення, то ЦПУ блока керуван ня17 запам'я товує це значення у визначених ча рунках ОЗУ і подає лінійно спадаючу за 3с напругу Uцап ламп від 5В до 0В на перший вхід блока керування освітлювальними пристроями13. При цьому робота блока керування освітлювальними пристроями 13 при подачі вище означеної напруги від 5В до 0В аналогічна роботі блока керуван ня освітлювальними пристроями 13 при подачі лінійно нарастаючої напруги Uцап ламп, описаної вище. ЦПУ блока керування 17 вимикає освітлювальні пристрої 12 шляхом подачі рівня логічної одиниці на вхід "Вмик./Вимик." блока керування освітлювальними пристроями 13. Дії останнього аналогічні описаним вище. ЦПУ блока керування 17 подає позитивну керуючу напругу на вхід трансфокатора 3 на час трансфо кації, передає у послідовному форматі код завершення трансфокації у переносний комп'ютер 25. Вбудований у ЦПУ блока керування 17 таймер завантажується двійковий числом, пропорційним часу Зс. У чарунки вбудованого ОЗУ ЦПУ блока керування 17 записується аварійний код виконання команди трансфо кації. ЦПУ блока керування 17 перевіряє протягом Зс. код виконання команди трансфо кації, що повинен надійти від оператора за допомогою переносного комп'ютера 25 по послідовному каналу. Якщо за цей час від переносного комп'ютера 25 не надійде коду нормального завершення команди трансфокації ,то у чарунки ОЗУ ЦПУ блока керуван ня 17 залишиться аварійний код виконання команди трансфокації. Якщо за 3 секунди від оператора за допомогою переносного комп'ютера 25 надійде нормальний код завершення команди трансфо кації, то він записуєть ся у відповідну чарун ку ОЗУ ЦПУ блока керування 17. ЦПУ блока керування 17 подає негативну керуючунапругу на вхід трансфокатора 3 на час трансфокації. Дії повторюються аналогічно описаним вище. ЦПУ блока керування 17 подає рівень логічного нуля на вхід "Ліворуч/П раворуч" бло ка керування баштою 9, а також рівень логічної одиниці на вхід "Пуск/Стоп" блока керування баштою 9. При цьому оптрон V1 замкнутий, а оптрон V2 і транзисторний перемикач 41 відкриті. Отже, на мостову схему перемикання 40 подається живильна напруга +27В. Так як оптрон V1 замкнутий, перший вивід якірної обмотки Я1 подключаєтья до ланцюга +27В, а другий - Я2 - до загального проводу 2 ("заг.2"), і двигун башти 8 обертається ліворуч. Вбудований в ЦПУ блока керування 17 таймер завантажується двійковім числом пропорційним часу рівному обертанню башти від се реднього положення до крайнього лівого. ЦПУ блока керування 17 виробляє пуск внутрішнього тай мера. З виходу блока керування 17 подається кодова посилка 1010 на шину КЗ -КО, що надходить на аноди діодів оптронів 8 40855 V8 - V11 відповідно. З емітерів транзисторів оптронов V8, V10 знімається рівень логічної одиниці, а з емітерів транзисторів оптронов V9, V11 знімається рівень логічного нуля, що відповідає гальва нічно розв'язаному коду 1010, що надходить на одинадцятий, два надцятий, тринадцятий і чотирнадцятий вхо ди багатовхідного мультиплексора 51 відповідно. При цьому напруга, що знімається з резистора R1 (датчика струму R1), відповідна споживаному струму, що споживається двигуном башти 8, послідовно увімкнутому з останнім, через багатовхідний мультиплексор 51, подається на перший вхід першого фільтру нижніх частот 48. Далі робота пристрою контролю 16 аналогічна роботі по визначенню струму, що споживається освітлювальними пристроями 12, описаної вище. Напруга Uацп пропорційна струму, що споживається двигуном башти 8, гальванічнo розв'язана від силових ланцюгів, подана на вхід багатоканального вбудованого у ЦПУ АЦП. ЦПУ виробляє визначене значення струму, що споживається двигуном башти 8. Якщо це значення рівно нулю або перевищує задане програмою аварійне значення, блок керуван ня 17 зупиняє двигун башти 8. При цьому на вхід "Пуск/Стоп" блока керування баштою 9 подається рівень логічного нуля. Оптрон V2 і транзисторний перемикач 41 закриваються і, як слідство, мостова схе ма перемикання 40 знеструмлюється, двигун башти 8 зупиняється. ЦПУ блока керуван ня 17 передає у переносний комп'ютер 25 по послідовному каналу значення струму, що споживається двигуном башти 8, і аварійний код діагностики двигуна башти 8, блока керуван ня баштою 9 і приступає до діагностики двигуна відеокамери 18. Якщо значення струму, що споживається двигуном башти 8 більш нуля і менш аварійного значення, то ЦПУ блока керування 17 запам'ятовує це значення у визначених чарун ках ОЗУ і передає це значення у переносний комп'ютер 25 по послідовному каналу. ЦПУ блока керування 17 опитує стан блока кінцевих ви микачів 6. Якщо стан лівого кінцевого вимикача башти відповідає рівню логічного нуля, то ЦПУ блока керування 17 зупиняє двигун башти 8 шляхом подачі рівня логічного н уля на вхід "Пуск/Стоп" блока керування баштою 9, принцип чинності якого при вимиканні описан вище. Запам'ятовуєть ся у визначених чарунках ОЗУ ЦПУ блока керування 17 код стану кінцевих вимикачів блока кінцевих ви микачів 6. Якщо стан лівого кінцевого вимикача башти відповідає рівню логічної одиниці і внутрішній таймер ЦПУ блока керування 17 не спрацював, то знову визначається споживаний струм двигуна башти 8 і перевіряється його значення по вище описаному алгоритму. Якщо стан лівого кінцевого вимикача башти відповідає рівню логічної одиниці і внутрішній таймер спрацював, то ЦПУ блока керування 17 зупиняє двигун башти 8 по вище описаному алгоритму, запам'я товує код стану блока кінцевих ви микачів 6 у визначених чарун ках ОЗУ ЦПУ блока керуван ня 17, передає аварійний код стану лівого кінцевого вимикача башти у переносний комп'ютер 25 по послідовному каналу. ЦПУ блока керуван ня 17 подає рівень логічної одиниці на вхід "Ліворуч/П раворуч" блока керування баштою 9, а також рівень логічної одиниці на вхід "П уск/Стоп" блока керуван ня баштою 9. При цьому оптрони V1 і V2, транзисторний перемикач 41 відкриваються і, як слідство, на мостову схе му перемикання 40 подається живильна напруга +27В. Так як оптрон V1 відкритий, вивід якірного ланцюга Я1 підключається до загального проводу 2 ("заг. 2"), а ви від якірного ланцюга Я2до ланцюга +27В, і двигун башти 8 обертається праворуч. Вбудований у ЦПУ блока керування таймер завантажується двійковим числом пропорційним часу рівному часу обертання башти від крайнього лівого положення до крайнього правого. ЦПУ блока керування 17 виробляє пуск внутрішнього таймера. Визначення струму, що споживається двигуном башти 8, його перевірка і визначення стану правого кінцевого вимикача башти виробляється аналогічно описаному вище алгоритму лівого повороту башти. У кінці перевірки башта вертається у центральне положення. ЦПУ блока керування 17 подає рівень логічної одиниці на вхід "У верх/Униз" блока керування відеокамерою 19, а також рівень логічної одиниці на його вході "Пуск/Стоп". Робота блока керування відеокамерой 19 відповідає роботі блока керування баштою 9 у режимі повороту праворуч описаної вище. Вбудований у ЦПУ блока керуван ня 17 таймер завантажується двійковий числом відповідним часу рівному часу обертання камери від крайнього нижнього положення у крайнє верхнє. ЦПУ блока керування 17 виробляє пуск таймера. З ви ходу блока керування 17 подається кодова посилка 1001 на шину К3-К0, що надхо дить на аноди діодів оптронів V8-V11 відповідно. З емітерів транзисторів оптронів V8-V11 знімається такий же двійковий гальванічно розв'язаний код 1001, що надхо дить на одинадцятий, дванадцятий, тринадцятий і чотирнадцятий вхо ди багатовхідного мультиплексора 51 відповідно. При цьому напруга, що знімається з датчика струму R3, відповідна споживаному струму двигуна відеокамери 18, послідовно увімкнутому з ним через багатовхідний мультиплексор 51, подається на перший вхід фільтру нижніх частот 48. Да лі робота пристрою контролю 16 аналогічна роботі по визначенню струму, що споживається освітлювальними пристроями 12,описаної раніш. Напруга Uацп пропорційна струму, що споживається двигуном камери 18, гальва нічнo розв'язана від силових ланцюгів, подана на вхід багатоканального вбудованого у ЦПУ блока керування 17. АЦП ЦПУ виробляє визначення струму, що споживається двигуном камери 18. Алгоритм діагностики блока керування відеокамерою 19 і її двигуном 18 аналогічний алгоритму перевірки блока керування баштою 9 і її двигуна 8, діагностуються стани верхнього і нижнього кінцевих ви микачів камери, двигун камери 18 зупиняється. ЦПУ блока керування 17 приступає до перевірки двигуна пантографа 14 і блока керування пантографом 15, алгоритм діагностики яких аналогічний алгоритму діагностики блока керування камерою 19 і двигуна камери 18. Двигун пантографа 14 установлюється у крайнє нижнє положення і зупиняється. ЦПУ блока керування 17 приступає до перевірки двигунів лівого борту 10, блока керування двигуна ми лівого борту 11, двигунів правого борту 20 і блока керування двигунами правого борту 21 9 40855 самохідного діагностичного робота 1. При цьому він включає двигуни лівого борту 10 і двигуни правого борту 20 шля хом одночасної подачі рівня логічного нуля на входи "Пуск/Стоп" блока керування двигуна ми лівого борту 11 і правого борту 21 відповідно. У зв'язку з тим, що робота цих бло ків однакова, розглянемо її на прикладі блока керування двигуна ми лівого борту 11. При надходженні рівня логічного нуля на вхід "Пуск/Стоп" блока керування двигуна ми лівого борту 11 (правого борту 21) транзистор V4 закривається, що дозволяє проходженню напруги Uцап лівого борту, Uцап правого борту на перший вхід мультивібратора з перестроюваючей шпаруватістю імпульсів 42, через резистор R14, на другий вхід якого подана напруга живлення+15В. ЦПУ блока керування 17 подає водночас рівень логічної одиниці на входи "Уперед/Назад" блока керування двигунами лівого борту 11 (правого 21) відповідно. При цьому оптрон V3 блока керування двигуна ми лівого борту 11 (правого 21) відкрився, мостова схе ма перемикання 43 спрацьовує і вивід Ш1 останньої через другий вхід підключився до напруги живлення +27В, а вивід Ш2 - до загального проводу 2 ("заг. 2») системи. З виходу бло ка керуван ня 17 подаються лінійно нарастаючі напруги Uцап лівого борту і Uцап правого борту від 0В до +5В на перший вхід блока керування двигунами лівого борту 11 (правого 21). Цi напруги через резистори R14 надхо дять на перші вхо ди мульти вібратора з перестроюваючей шпарува тістю імпульсів 42.У залежності від величини напруг Uцап лівого борту (Uцап правого борту) на ви ході останнього ге нерується імпульсна напруга зі шпарува тістю відповідною (пропорційною) Uцап лівого борту (и цап правого борту), що надхо дить на аноди діодів оптронів V5. Ця напруга перетворюється у світловий сигнал, що приводить до спрацьовування транзисторів оптронів V5, з колектора яких імпульсна, гальванічно розв'язана напруга, надходить на перший вхід на півпровідникового реле 44, на другий вхід якого подається живильна напруга +27В. Гальванічно розв'язані импульсні напруги, відповідні напругам Uцап лівого борту і Uцап правого борту, знімаються з виходів напівпровідникових реле 44 і подаються на якірні обмотки двигунів лівого борту 10, дви гунів правого борту 20. Так як якірні обмотки останніх володіють великими значеннями індук тивностей, вони водночас виконують інтегрування напруг, що надхо дять. Таким чином, при зміні напруги Uцап лівого борту і Uцап правого борту, змінюється шпаруватість імпульсів мультивибраторів з перестроюваною шпаруватістю імпульсів 42 і, як слідство, змінюєтся швидкість обертання двигунів лівого борту 10 і правого борту 20. Сигнал з загального проводу 1 ("заг. 1") подається на емітери транзисторів V4, на катоди діодів оптронів V3 і V5 і другий вихід мультивібратора з перестроюваною шпаруватістю імпульсів 42. Емітери транзисторів оптронів V3, V5, другі виходи напівпровідникового реле 44 і мостової схеми перемикання 43 - до загального проводу 2 ("заг. 2") системи. Оптроны V3, V5 забезпечують гальванічну розв'язку керуючих ланцюгів, що надхо дять від блока керування 17, від силових ланцюгів. Блок керування 17 послідовно видає двійкові коди від 0001 до 0110 на шину К3-К0 відповідно. При цьому напруги, що знімаються з датчиків струмів R5 -R10 послідовно підключаються до входу Uцап блока керування 17. Робота пристрою контролю 16 при зніманні напруг з датчиків струмів R5R10 аналогічна роботі пристрою контролю 16 при зніманні напруг з да тчиків струмів R1- R4, описаної вище. ЦПУ блока керування 17 послідовно вимірює споживаючі струми двигунами лівого борту 10 і правого борту 20. Якщо означені струми знаходяться у заданих межах, ЦПУ блока керування 17 запам'ятовує їх значення у визначених чарунках вбудованих у ЦПУ ОЗУ і зупиняє двигуни лівого і правого бортів. Якщо означені струми виявилися за межами робітничих ве личин, то ЦПУ блока керування 17 запам'ятовує їх значення у визначених чарун ках вбудованого в ЦПУ ОЗУ і зупиняє двигуни лівого борту 10 і правого - 20 і передає у переносний комп'ютер 25 по послідовному каналу аварійні коди діагности ки відповідні кожному двигун у лівого борту 10, двигуну правого борту 20 і блока керування двигунами лівого борту 11, правого борту - 21. Робота при перевірці руху діагностичного робота 1 назад, діагности ка двигунів лівого і правого бортів і їх блоків керування аналогічна роботі при русі уперед. Винятком є наступ не: на вхід "Уперед/Назад" блока керуван ня двигуном лівого борту 10 і блока керування двигуном правого борту 21 подається рівень логічного нуля від блока керування 17, при цьому оптрон V3 закритий, а мостова схе ма перемикання 43 спрацювала таким чином, що вивід Ш1 останньої підключився до загального проводу 2 ("заг. 2"), а ви від Ш2 - до напруги живлення +27В. Подаючи різні значення Uцап лівого борту і Uцап правого борту можна змінювати напрямки руху діагностичного робота 1 (ліворуч, праворуч). Блок керування 17 визначає значення уклону, що знімається з датчика уклону 7. При цьому напруга, що знімається з виходу датчика уклону 7, безпосередньо подається на один з входів багатоканального вбудованого у ЦПУ блока керування 17 АЦП. Якщо значення уклону менше 1° і більше +60°, то ЦПУ блока керування 17 передає аварійний код діагностики датчика уклону 7 у переносний комп'ютер 25 по послідовному каналу. Якщо значення уклону лежить у означених межах, то ЦПУ блока керування 17 передає у переносний комп'ютер 25 значення уклону. Блок керування 17 передає у переносний комп'ютер 25 по послідовному каналу параметри стану діагностичного робота 1 і код завершення підпрограми діагности ки. Якщо параметри стану діагностичного роботу 1 знаходяться у нормі (значення усіх струмів, що споживаються двигунами і освітлювальними пристроями відповідають заданим значенням, значення усіх живильних напруг також знаходяться у нормі, дієздатні усі блоки і модулі системи), то ЦПУ блока керування 17 виробляє читання коду команди з чарунки вбудованого у нього ОЗУ. Якщо параметри вийшли за межі заданих, то діагностичний робот 1 вимикається оператором. Код команди, що ви конується, надхо дить у ОЗУ ЦПУ блока керуван ня 17 по послідовному каналу з переносного комп'ютера 25. Необхідну команду вибирає оператор з меню команд наведе 10 40855 них на екрані переносного комп'ютера 25 у залежності від обстави у зоні обстеження трубопроводу. Якщо ЦПУ блока керуван ня 17 визначив код команди "Уперед", то діагностичний робот 1 приступає до виконання відповідної підпрограми. При надходженні команди "Уперед" від переносного комп'ютера 25 також по послідовному каналу передається кодова посилка, що відповідає швидкості руху самохідного діагностичного робота 1, запам'ятовуєть ся у визначених чарунках ОЗУ ЦПУ блока керування 17. ЦПУ блока керуван ня 17 подає рівень логічного нуля на входи "Пуск/Стоп" блока керування двигуном лівого борту 11 і блока керування двигуном правого борту 21 відповідно. При цьому транзистори V4 закриваються, дозволяючи проходження напруг Uцап лівого борту і Uцап правого борту на перші вхо ди мультивибраторов з перестроюваною шпарува тістю імпульсів 42 через резистор R14, на другий вхід якого подана напруга +15В. ЦПУ блока керування 17 подає водночас рівень логічної одиниці на входи "Уперед/Назад" блока керування двигунами лівого борту 11 і блока керування двигуна ми правого борту 21 відповідно. При цьому оптрони V3 останніх відчиняються і мостові схеми перемикання 43 спрацьовувають таким чином, що висновки Ш1 останніх підключаються до напруги +27В, а висновки Ш2 - до загального проводу 2 ("заг. 2") систе ми. З виходу бло ка керування 17 подається лінійно нарастаюча напруга Uцап лівого борту і Uцап правого борту від 0В до напруги, відповідної швидкості руху діагностичного самохідного робота 1, на перші вхо ди блока керування двигуном лівого борту 11 і блока керуван ня двигуном правого борту 21 відповідно. Ці напруги через резисто ри R14 надходять на перші вхо ди мультивібратора з перестроюваною шпарува тістю імпульсів 42. У залежності від величини напруг Uцап лівого борту (Uцап правого борту) на виході мультивібратора з перестроюваною шпарува тістю імпульсів 42 генерується імпульсна напруга зі шпаруватістю відповідною (пропорційною) Uцап лівого борту (Uцап правого борту), що надхо дить на аноди діодів оптронів V5. Ця напруга перетворюється у світловий сигнал, що приводить до спрацьовування транзисторів оптронів V5, з колектора яких імпульсна, гальванічнo розв'язана напруга, надходить на перший вхід напівпровідникового реле 44, на другий вхід якого подається живильна напруга +27В. Гальванічнo розв'язані імпульсні напруги, відповідні напругам Uцап лівого борту і Uцап правого борту, знімаються з виходів на півпровідникових реле 44 і подаються на якірні обмотки двигунів лі вого борту 10 і двигунів правого борту 20. Так як якірні обмотки останніх володіють великими значеннями індуктивностей, во ни водночас виконують інтегрування напруг, що надхо дять. Таким чином при зміні напруги Uцап лівого борту і Uцап правого борту,змінюється шпарува тість імпульсів мультивибраторов з перестроюваною шпаруватістю імпульсів 42 і, як слідство, змінюється швидкість обертання двигунів лі вого борту 10 і правого борту 20. Сигнал з загального проводу 1 ("заг. 1") подається на емітери транзисторів V4, на катоди діодів оптронів V3 і V5 і др угий вихід мультивібратора з перестроюваною шпарува тістю імпульсів 42. Емітери транзисторів оптронів V3, V5, другі ви ходи напівпровідникового реле 44 і мостової схеми перемикання 43 - до загального проводу 2 ("заг. 2") системи. Оптроны V3, V5 забезпечують гальванічну розв'язку керуючих ланцюгів, що надхо дять з блока керування 17 від силових. ЦПУ блока керуван ня 17 передає у переносний комп'ютер 25 по послідовному каналу код завершення виконання команди "Уперед", що викликає появу відповідного повідомлення на екрані переносного комп'ютера 25. ЦПУ блока керування 17 записує у ча рунку команд вбудованого у нього ОЗУ код, відмінний від тих що використовуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. При цьому ЦПУ блока керуван ня 17 знову видобуває команду з ча рунки команд ОЗУ і проводить її дешифрацію. Якщо код команди не відповідає коду команди "Уперед", ЦПУ блока керування 17 порівнює його з кодом команди "Назад". Якщо код команди співпав з кодом команди "Назад", то виконується відповідна підпрограма. При надходженні команди "Назад" від переносного комп'ютера 25 також по послідовному каналу передається кодова посилка, що відповідає швидкості руху самохідного діагностичного робота 1, запам'ятована у визначених чарунках ОЗУ ЦПУ блока керуван ня 17. ЦПУ блока керування 17 подає рівень логічного нуля на входи "Пуск/Стоп" блока керування двигуном лівого борту 11 і блока керування двигуном правого борту 21 відповідно. При цьому їх транзистори V4 закриваються, дозволяючи проходження напруг Uцап лівого борту і Uцап правого борту на перші вхо ди мультивібратора з перестроюваючей шпарува тістю імпульсів 42 через резистори R14, на другий вхід якого подана напруга+15В. ЦПУ блока керування 17 подає водночас рівень логічного нуля на вхо ди 'Уперед/Назад" блока керування двигунами лівого борту 11 і блоком керування двигунами правого борту 21 відповідно. Оптроны V3 останніх закриваються і мостова схе ма перемикання 43 спрацьовує таким чином, що висновки Ш1 останніх підключаються до загального проводу 2 ("заг. 2") системи, а висновки Ш2 - до напруги +27В. З виходу бло ка керування 17 подаються лінійно наростаючі напруги Uцап лівого борту і Uцап правого борту від 0В до напруги, відповідної швидкості руху діагностичного самохідного робота 1, на перші вхо ди блока керування двигуном лівого борту 11 і блока керуван ня двигуном правого борту 21 відповідно. Ці напруги через резистор R14 надходять на перші вхо ди мультивібратора з перестроюваною шпарува тістю імпульсів 42. У залежності від величини напруг Uцап лівого борту (Uцап правого борту) на виході мультивібратора з перестроюваною шпарува тістю імпульсів 42 генерується імпульсна напруга зі шпаруватістю відповідною (пропорційною) Uцап лівого борту (Uцап правого борту), що надходить на аноди діодів оптронiв V5. Ця напруга перетворюється у світловий сигнал, що приводить до спрацьовуван ня транзисторів оптронів V5, з колектора яких імпульсна, гальванічнo розв'язана напруга, надхо дить на перший вхід напівпровідникового реле 44, на другий вхід якого подається живильна напруга +27В. Гальванічнo розв'язані імпульсні напруги відповідні 11 40855 напругам Uцап лівого борту і Uцап правого борту знімаються з виходів напівпровідникових реле 44 і подаються на якірні обмотки двигунів лівого борту 10 і двигунів правого борту 20. Так як якірні обмотки останніх во лодіють великими значеннями індуктивностей, вони водночас виконують інтегрування напруг, що надхо дять. Таким чином, при зміні напруги Uцап лівого борту і Uцап правого борту, змінюється шпаруватість імпульсів мультивибраторів з перестроюваноюй шпарува тістю імпульсів 42 і, як слідство, змінюється швидкість обертання двигунів лівого борту 10 і правого борту 20. Сигнал з загального проводу 1 ("заг. 1") подається на емітери транзисторів V4, на катоди діодів оптронів V3 і V5 і другий вихід мульти вібратора з перестроюваною шпаруватістю імпульсів 42. Емітери транзисторів оптронів V3, V5, др угі виходи напівпровідникового реле 44 і мостової схе ми перемикання 43 - до загального проводу 2 ("заг. 2") системи. Оптрони V3, V5 забезпечують гальванічну розв'язку керуючих ланцюгів, що надходять з блока керування 17 від силових. ЦПУ блока керування. 17 передає у переносний комп'ютер 25 по послідовному каналу код завершення виконання команди "Уперед", що викликає появу відповідного повідомлення на екрані переносного комп'ютера 25. ЦПУ блока керування 17 записує у чарунка команд вбудованого у нього ОЗУ код, відмінний від тих що використовують ся у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. При цьому ЦПУ блока керування 17 знову видобуває команду з чарун ки команд ОЗУ і проводить її де шифрацію. Подаючи різні значення швидкостей обертання двигунів лі вого борту 11 і дви гунів правого борту - 20, а також, при зміні направлення їх обертання (уперед або назад), оператор може маневрувати діагностичним роботом 1 у залежності від конкретної обста новки всередині трубопроводу на час дослідження. Якщо код команди не відповідає коду "Назад", ЦПУ блока керування 17 порівнює його з кодом команди "Пантограф уверх". Якщо код команди співпав, то виконується відповідна підпрограма. При цьому ЦПУ блока керування 17 перевіряє стан блока кінцевих ви микачів 6. Якщо стан кінцевого верхн ього вимикача пантографа відповідає рівню логічного нуля (тобто він активний) і ,як слідство, пантограф піднімати не можна, блок керування 17 передає код завершення виконання команди "Пантограф уверх" і код стану блока кінцевих ви микачів 6 у переносний комп'ютер 25 по послідовному каналу. Відповідне повідомлення з'являється на екрані переносного комп'ютера 25. ЦПУ блока керуван ня 17 записує у чарун ку команд вбудованого ОЗУ код, відмінний від тих що використовуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову ви добуває команду з чарунки команд ОЗУ і проводить її дешіфрацію. Якщо стан кінцевого верхнього ви микача пантографа відповідає рівню логічної одиниці (тобто він пасивний), ЦПУ блока керування 17 подає рівні логічної одиниці на вхід "Уверх/У низ" і вхід "Пуск/Стоп" блока керуван ня пантографом 15. При цьому оптрони V1 і V2, транзисторний перемикач 41 відкриваються і, як слідство, на мостову схе му перемикання 40 подається живильна напруга +27В. Так як оптрон V1 відкритий, ви від Я1 останньої підключається до ланцюга +27В, а вивід Я2 до загального проводу 2 ("заг. 2") і двигун пантографа 14 піднімає пантограф. Підключення загальних проводів 1 і 2 блока керування пантографом 15 докладно описані вище. Блок керуван ня 17 передає код завершення виконання команди "Пантограф униз" і код стану блока кінцевих вимикачів 6 у переносний комп'ютер 25 по послідовному каналу. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керуван ня 17 записує у чарун ку команд вбудованого ОЗУ код, відмінний від тих що використовуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову ви добуває команду з чарунки команд ОЗУ і проводить її дешіфрацію. Якщо код команди не відповідає коду команди "Пантограф увер х", ЦПУ блока керування 17 порівнює його з кодом команди "Пантограф униз". Якщо код команди співпав, то ви конується відповідна підпрограма. При цьому ЦПУ блока керування 17 перевіряє стан блока кінцевих ви микачів 6. Якщо стан кінцевого нижнього ви микача пантографа відповідає рівню логічного нуля (тобто він активний), пантограф опускати не можна, блок керування 17 передає код завершення виконання команди "Пантограф униз" і код стану блока кінцевих вимикачів 6 по послідовному каналу передається у переносний комп'ютер 25. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у чарун ку команд вбудованого ОЗУ код, відмінний від тих що ви користуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову видобуває команду з чарунки команд ОЗУ і проводить її дешіфрацію. Якщо стан кінцевого нижнього вимикача пантографа відповідає логічній одиниці (тобто він пасивний), ЦПУ блока керуван ня 17 подає рівень логічного нуля на вхід "У верх/У низ" блока керування пантографом 15 і рівень логічної одиниці на вхід "Пуск/Стоп" останнього. При цьому оптрон V2 відкривається і, як слідство, спрацьовує транзисторний перемикач 41, подаючи живильну напругу +27В на мостову схе му перемикання 40. Оптрон V1 замкнутий, отже вивід Я1 мостовій схеми перемикання 40 підключається до загального проводу 2 ("заг. 2"), а Я2 - до ланцюгу +27В і двигун пантографа 14 опускає пантограф. Підключення загальних проводів 1 і 2 ("заг. 1" і "заг. 2") до блока керування пантографом 15 докладно описані вище. Блок керування 17 передає код завершення виконання команди "Пантограф униз" і код стану блока кінцевих вимикачів 6 у переносний комп'ютер 25 по послідовному каналу. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керуван ня 17 записує у чарун ку команд вбудованого ОЗУ код, відмінний від тих що використовуються у системі, і вертається у основну програму керування діагностичним роботом 1. ЦПУ блока уп равління 17 знову видобуває команду з ча рунки команд ОЗУ і проводить її дешіфрацію. Якщо код команди не відповідає коду команди "Пантограф 12 40855 униз", ЦПУ блока керуван ня 17 порівнює його з кодом команди "Башта ліворуч". Якщо код команди співпав, то виконується відповідна підпрограма. При цьому ЦПУ блока керування 17 перевіряє стан блока кінцевих ви микачів 6. Якщо стан кінцевого лівого ви микача башти відповідає рівню логічного нуля,тобто він активний і башту за вертати ліворуч не можна, блок керування 17 передає код завершення виконання команди "Башта ліворуч" і код стану бло ка кінцевих ви микачів 6 по послідовному каналу передається у переносний комп'ютер 25. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока управління 17 записує у чарунку команд вбудованого ОЗУ код, відмінний від ти х що використуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову видобуває команду з чарун ки команд ОЗУ і проводить її де шіфрацію. Якщо стан кінцевого лівого вимикача башти відповідає рівню логічної одиниці (тобто він пасивний), ЦПУ блока керування 17 подає рівні логічних одиниць на входи "Ліворуч/П раворуч", і "Пуск/Стоп" блока керування баштою 9. Ро бота останнього аналогічна роботі блока керування пантографом 15 при виконанні команди "Пантограф увер х", описаної вище. Блок керуван ня 17 передає код завершення виконання команди "Пантограф униз" і код стану блоків кінцевих ви микачів 6 у переносний комп'ютер 25 по послідовному каналу. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керуван ня 17 записує у чарун ку команд вбудованого ОЗУ код, відмінний від тих що використовуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову ви добуває команду з ча рунки команд ОЗУ і проводить її дешифрацію. Якщо код команди не відповідає коду команди "Башта ліворуч", ЦПУ блока керування 17 порівнює його з кодом команди "Башта праворуч". Якщо код команди співпав, то ви конується відповідна підпрограма. При цьому ЦПУ блока керування 17 перевіряє стан блока кінцевих ви микачів 6. Якщо стан кінцевого правого вимикача башти відповідає рівню логічного нуля, тобто він активний, і башту завертати праворуч не можна, блок керування 17 передає код завершення виконання команди "Башта праворуч" і код стану бло ка кінцевих вимикачів 6 по послідовному каналу передається у переносний комп'ютер 25. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у чарунки команд вбудованого ОЗУ код, відмінний від тих що використують ся у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову ви добуває команду з чарун ки команд ОЗУ і проводить її дешіфрацію. Якщо стан кінцевого правого ви микача башти відповідає рівню логічної одиниці (тобто він пасивний), ЦПУ блока керуван ня 17 подає рівень логічного нуля на вхід "Лі воруч/П раворуч" і рівень логічної одиниці на вхід "Пуск/С топ" блока керування баштою 9. Робота останнього аналогічна роботі блока керування пантографом 15 при виконанні команди "Пантограф униз" описаної вище. Блок керування 17 передає код завершення виконання команди "Пантограф униз" і код стану бло ків кінцевих ви микачів 6 у переносний комп'ютер 25 по послідовному каналу. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у ча рунку команд вбудованого ОЗУ код, відмінний від тих що ви користо вують ся у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову видобуває команду з чарунки команд ОЗУ і проводить її де шифрацію. Якщо код команди не відповідає коду команди "Башта праворуч", ЦПУ блока керуван ня 17 порівнює його з кодом команди "Камера уверх". Якщо код команди співпав, то виконується відповідна підпрограма. При цьому ЦПУ блока керуван ня 17 перевіряє стан блока кінцеви х ви микачів 6. Якщо стан кінцевого верхнього вимикача камери відповідає рівню логічного нуля, тобто він активний, і камеру піднімати не можна, блок керування 17 передає код завершення виконання команди "Камера уверх" і код стану блока кінцевих ви микачів 6 по послідовному каналу передається у переносний комп'ютер 25. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у ча рунку команд вбудованого ОЗУ код, відмінний від тих, що ви користуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову видобуває команду з чарунки команд ОЗУ і проводить її деши фрацію. Якщо стан кінцевого верхнього вимикача камери відповідає рівню логічної одиниці (тобто він пасивний), ЦПУ блока керування 17 подає рівень логічної одиниці на входи "Уверх/У низ" і "Пуск/Стоп" блока керуван ня камерою 19. Робота останнього аналогічна роботі блока керування пантографом 15 при виконанні команди "Пантограф увер х", описаної вище. Блок керуван ня 17 передає код завершення виконання команди "Пантограф униз" і код стану блоків кінцевих ви микачів 6 у переносний комп'ютер 25 по послідовному каналу. Відповідне повідомлення з'явиться на екрані останнього. ЦПУ блока керуван ня 17 записує у чарун ку команд вбудованого ОЗУ код, відмінний від тих що використовуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову ви добуває команду з ча рунки команд ОЗУ і проводить її дешифрацію. Якщо код команди не відповідає коду команди "Камера уверх", ЦПУ блока керування 17 порівнює його з кодом команди "Камера униз". Якщо код команди співпав, то виконується відповідна підпрограма. При цьому ЦПУ блока керуван ня 17 перевіряє стан блока кінцеви х ви микачів 6. Якщо стан кінцевого нижнього вимикача камери відповідає рівню логічного нуля, тобто він активний, і камеру опускати не можна, блок керування 17 передає код завершення виконання команди "Камера униз" і код стану бло ка кінцевих ви микачів 6 по послідовному каналу передається у переносний комп'ютер 25. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у ча рунку команд вбудованого ОЗУ код, відмінний від тих, що ви користуються у системі, і 13 40855 вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову видобуває команду з чарунки команд ОЗУ і проводить її де шіфрацію. Якщо стан кінцевого нижнього вимикача камери відповідає рівню логічної одиниці (тобто він пасивний), ЦПУ блока керування 17 подає рівень логічного нуля на вхід "Уверх/У низ" і рівень логічної одиниці на вхід "Пуск/Стоп" блока керування камерою 19. Робота останнього аналогічна роботі блока керування пантографом 15 при виконанні команди "Пантограф униз", описаної вище. Блок управления 17 передає код завершення виконання команди "Пантограф униз" і код стану блока кінцевих ви микачів 6 у переносний комп'ютер 25 по послідовному каналу. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у ча рунку команд вбудованого ОЗУ код, відмінний від тих, що використовують ся у системі, і вертаєть ся у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову ви добуває команду з чарун ки команд ОЗУ і проводить її дешифрацію. Якщо код команди не відповідає коду команди "Камера униз", ЦПУ блока керування 17 порівнює його з кодом команди "Включення освітлення". Якщо код команди співпав, то ви конується відповідна підпрограма. При надходженні команди "Вмик. освітлення" від переносного комп'ютера 25 по послідовному каналу також передається кодова посилка відповідна необхідної освітленості освітлювальних пристроїв 12, що запам'ятовується у визначених чарун ках вбудованого ОЗУ ЦПУ блока керування 17. Останній подає рівень логічного нуля на вхід "Вмик/Вимик" блока керуван ня освітлювальними пристроями 13. При цьому транзистор V6 останнього закривається, дозволяючи, таким чином, проходження напруги Uцап ламп від блока керування 17 на перший вхід муль тивібратора з перестроюваною шпарува тістю імпульсів 45 че рез резистор R19, на другий вхід якого подана напруга +15В. З виходу блока керування 17 подається лінійно наростаюча напруга Uцап ламп від 0В до напруги відповідної кодової посилки, отриманої від переносного комп'ютера 25 на вхід ЦАП ламп блока керуван ня освітлювальними пристроями 13. Ця напруга че рез резистор R19 надходить на перший вхід м ультивібратора з перестроюваною шпаруватістю імпульсів 45. У залежності від ве личини напруги Uцап ламп на виході останнього генерується імпульсна напруга зі шпарува тістю відповідної Uцап ламп, що надхо дить на анод діода оптрона V7. Ця напруга перетворюється у світловий потік, що приводить до спрацьовування транзистора оптрона W, з колектора якого імпульсна, гальванічнo розв'язана напруга, надхо дить на перший вхід напівпровідникового реле 46, на другий вхід якого подається напруга +27В. Напівпровідникове реле 46 спрацьовує і напруга з його першого виходу подається на послідовно з'єднані лампи Е1, Е2 освітлювальних пристроїв 12. Так як останні володіють великим значенням інерційності, вони виконують інтегрування напруги, що на них надходить. Таким чином, при зміні напруги Uцап ламп, шляхом зміни одержуваної від переносного комп'ютера 25 кодової посилки, змінюється ступінь освітленості освітлювальних пристроїв 12. Сигнал з загального проводу 1 ("заг. 1") подається на другий вихід мульти вібратора з перестроюваючей шпарува тістю імпульсів 45, на емітер транзистора V6 і на катод діода оптрона V7. Сигнал з загального проводу 2 ("заг. 2") подається на емітер транзистора оптрона V7 і на другий вихід напівпровідникового реле 46. Блок керування 17 передає код завершення команди "Вимик. освітлення" по послідовному каналу у переносний комп'ютер 25. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у чарунку команд вбудованого ОЗУ код, відмінний від тих, що ви користовують ся у системі, і вертається у основну програму керуван ня самохідним діагностичним роботом 1. ЦПУ блока керуван ня 17 знову видобуває команду з чарунки команд вбудованого у ЦПУ ОЗУ і приступає до її де шифрації. Якщо код команди не відповідає коду команди "Вмик. освітлення", ЦПУ блока керування 17 порівнює його з кодом команди "Збільшення зображення". Якщо код команди співпав, то виконується відповідна підпрограма. При цьому на вхід трансфо катора 3 надхо дить позитивна керуюча напруга +15В з виходу бло ка керування 17 і він передає код завершення команди "Збільшення зображення" у переносний комп'ютер 25 по послідовному каналу. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у чарун ки команд вбудованого ОЗУ код, відмінний від тих, що використуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову видобуває команду з ча рунки команд вбудованого у ЦПУ ОЗУ і приступає до її дешіфрації. Якщо код команди не відповідає коду команди "Збільшення зображення", ЦПУ блока керування 17 порівнює його з кодом команди "Зменшення зображення". Якщо код команди співпав, то виконується відповідна підпрограма. При цьому на вхід трансфокатора 3 надхо дить негативна керуюча напруга -15В з виходу блока керування 17. Він передає код завершення команди "Зменшення зображення" у переносний комп'ютер 25 по послідовному каналу. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока управління 17 записує у чарун ку команд вбудованного ОЗУ код, відмінний від ти х, що використовуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову ви добуває команду з ча рунки команд вбудованного в ЦПУ ОЗУ і приступає до ії дешифрації. Якщо код команди не відповідає коду команди "Зменшення зображення", ЦПУ блока керування 17 зрівнює його з кодом команди "Зупинка двигунів лівого і правого бортів". Якщо код команди співпав, то ви конується відповідна підпрограма. При цьому від блока керування 17 на входи Uцап лівого борту і Uцап правого борту бло ків керування двигунами лівого борту 11 і дви гунами правого борту 21 відповідно, водночас подаються лінійно спадні напруги від рівнів відповідних швидкості руху самохідного діагностичного робота 1 до 0В. Напруга U цап лівого борту і U цап правого 14 40855 борту надходять на перші входи мультивібраторів з перестроюваючей шпаруватістю імпульсів 42 через резистори R14, а на другий вхід його подана живильна напруга +15 В. З першо го виходу мультивібратора з перестроюваною шпарува тістю імпульсів 42 знімається імпульсна напруга, шпаруватість якої змінюється у залежності від зміни напруг Uцап лівого борту, Uцап правого борту і надхо дить на аноди діодів оптронів V5. Оптрони V5 спрацьовують і передають імпульсну, гальванічно розв'язану напругу на перший вхід на півпровідникового реле 44, на другий вхід якого подається напруга+27В. З виходу напівпровідникового реле 44 імпульсна напруга подається на якірні обмотки двигунів лі вого борту 10 і двигунів правого борту 20. Завдяки індуктивності якірних обмоток двигунів, відбувається інтегрування вихідної напруги напівпровідникового реле 44. Так як напруги Uцап лівого борту і Uцап правого борту лі нійно спадають до 0В, тривалість iмпульсів, що знімаються з виходу мультивібратора з перестроюваною шпарува тістю імпульсів 42 і, як слідство, тривалість импульсів, що знімаються з виходу напівпровідникового реле 44 зменшуєть ся. Отже зменшується напруга на якірних обмотках двигунів правого 20 і лівого 10 бортів, вони зупиняються. На вхо ди "Пуск/Стоп" блока керування двигуна ми лівого борту 11 і блока керування двигунами правого борту 21 надхо дять напруги відповідні рівню логічної одиниці від блока керування 17. Транзистори V4 блока керування двигуна ми лівого борту 11 і правого борту 21 відкриваються, забороняючи, тим самим, проходження напруг Uцап лівого борту і Uцап правого борту на перші входи мульти вибраторов з перестроюваючей шпарува тістю імпульсів 42 відповідно. Рівень напруги на вході "Уперед/Назад" блока керування двигунами лівого борту 11 і правого борту 21 при виконанні даної команди не має значення і відповідає останній команді, що ви конується, "Уперед" або "Назад". Підключення сигналів загального проводу 1 ("заг. 1") і загального проводу 2 ("заг. 2") описано вище. Значення напруг на виходах Ш1 і Ш2 мостової схе ми перемикання 43 відповідають напругам вста новленим на цих висновках під час виконання останньої команди "Уперед" або "Назад", описаних ви ще. Блок керуван ня 17 передає код завершення виконання команди "Зупин двигунів лі вого і правого бортів" по послідовному каналу у переносний комп'ютер 25. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у чарун ку команд вбудованого ОЗУ код, відмінний від тих що використовуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову ви добуває команду з ча рунки команд вбудованого у ЦПУ ОЗУ і приступає до її де шифрації. Якщо код команди не відповідає коду команди "Зупин двигунів лівого і правого бортів", ЦПУ блока керування 17 порівнює його з кодом команди "Зупин пантографа". Якщо код команди співпав, то виконується відповідна підпрограма. При цьому на вхід "Пуск/Стоп" блока керування пантографом 15 подається рівень логічного нуля від блока керування 17. Оптрон V2 блока керування пантографом 15 закривається і знеструмлюває транзисторний перемикач 41, що, у свою чер гу, приводить до знеструмлення мостової схе ми перемикання 40 і зупину двигуна пантографа 14. Напруга на висновках Я1, Я2 рівна 0В. Рівень напруги на вхо ді "Уверх/У низ" блока керування пантографом 15 значення не має і відповідає останній команді, що виконується: "Пантограф уверх" або "Пантограф униз". Підключення сигналів з загального проводу 1 ("заг. 1") і з загального проводу 2 ("заг. 2") описано вище. Зна чення напруг на висновках Ш1 і Ш2 мостової схеми перемикання 40 відповідають напругам встановленим на цих висновках під час виконання останньої команди: "Пантограф уверх" або "Пантограф униз", описаних вище. Блок керування 17 передає код завершення виконання команди "Зупин пантографа" по послідовному каналу у переносний комп'ютер 25. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у чарунку команд вбудованого ОЗУ код, відмінний від тих що ви користовують ся у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову видобуває команду з ча рунки команд вбудованого у ЦПУ ОЗУ і приступає до її дешифрації. Якщо код команди не відповідає коду команди "Зупин пантографа", ЦПУ блока керування 17 порівнює його з кодом команди "Зупин башти". Якщо код команди співпав, то виконується відповідна підпрограма. При цьому на вхід "Пуск/С топ" блока керування баштою 9 подається рівень логічного нуля від блока керуван ня 17. Оптрон V2 блока керування баштою 9 закривається і знеструмлює транзисторний перемикач 41, що, у свою чергу, приводить до знеструмлення мостової схеми перемикання 40 і зупину двигуна башти 8, напруги на висновках Я1, Я2 дорівнюють 0В. Рівень напруги на вхо ді "ЛІВОРУЧ/ПРАВОРУЧ" бло ка керування баштою 9 значення не має і відповідає останній команді, що ви конується: "Башта ліворуч" або "Башта праворуч". Підключення сигналів з загального проводу 1 ("заг. 1") і з загального проводу 2 ("заг. 2") описано вище. Значення напруг на висновках Ш1 і Ш2 мостової схе ми перемикання 40 відповідають напругам встановленим на цих висновках під час виконання останньої команди: "Башта ліворуч" або "Башта праворуч", описаних вище. Блок керування 17 передає код завершення виконання команди "Зупин башти" по послідовному каналу у персональний комп'ютер 25. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у чарун ку команд вбудованого ОЗУ код, відмінний від тих що використовуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову ви добуває команду з ча рунки команд вбудованого у ЦПУ ОЗУ і приступає до її де шифрації Якщо код команди не відповідає коду команди "Зупин башти", ЦПУ блока керування 17 порівнює його з кодом команди "Зупин камери". Якщо код команди співпав, то виконується відповідна підпрограма. При цьому на вхід "Пуск/С топ" блока керування камерою 19 подається рівень логічного нуля від блока керуван ня 17. Оптрон V2 блока керування камерою 19 закривається і знеструмлює транзисторний перемикач 41, що, у свою чергу, приводить до знеструмлення мостової схеми пе 15 40855 ремикача 40 і зупину дви гуна камери 18, напруги на висновках Я1, Я2 якого дорівнюють 0В. Рівень напруги на вхо ді "Уверх/Униз" блока керування камери 19 значення не має і відповідає останній команді, що виконується: "Камера уверх" або "Камера униз". Підключення сигналів з загального проводу 1 ("заг. 1") і з загального проводу 2 ("заг. 2") описано вище. Зна чення напруги на висновках Ш1 і Ш2 мостової схе ми перемикання 40 відповідають напругам встановленим на цих висновках під час виконання останньої команди: "Камера увер х" або "Камера униз", описаних вище. Блок керування 17 передає код завершення виконання команди "Зупин камери" у переносний комп'ютер 25 по послідовному каналу. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у ча рунку команд вбудованого ОЗУ. код, відмінний від тих що використовуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову ви добуває команду з ча рунки команд вбудованого у ЦПУ ОЗУ і приступає до її де шифрації. Якщо код команди не відповідає коду команди "Зупин камери", ЦПУ блока керування 17 порівнює його з кодом команди "Вимкнення освітлення". Якщо код команди співпав, то ви конується відповідна підпрограма. При цьому на вхід Uцап ламп блока керуван ня освітлювальними пристроями 13 подається лінійно спадна напруга від рівня відповідного рівню напруги освітленості освітлювальних пристроїв 12, встановленому під час виконання команди "Вмик. освітлення", до 0В від блока керування 17. Напруга Uцап ламп надхо дить на перший вхід мульти вібратора з перестроюваною шпарува тістю імпульсів 45 через резистор 19, а на другий вхід його подана живильна напруга +15В. З першого ви ходу м ультивібратора з перестроюваною шпарува тістю імпульсів 45 знімається імпульсна напруга, шпарува тість якої змінюється у залежності від зміни напруги Uцап ламп і надходить на анод діода оптрона W. Останній спрацьовує і передає імпульсну, гальванічно розв'язану напругу на перший вхід напівпровідникового реле 46, на другий вхід якого подається живильна напруга+27В. З виходу на півпровідникового реле 46 імпульсна напруга подається на освітлювальні пристрої 12. Завдяки інерційності останніх, відбувається інтегрування вихідної напруги напівпровідникового реле 46. Так як напруга Uцап ламп лінійно спадає до 0В, тривалість iмпульсів, що знімаються з виходу мульти вібратора з перестроюваною шпаруватістю імпульсів 45, і, як слідство, тривалість iмпульсів, що знімаються з виходу напівпровідникового реле 46, зменшується. Отже зменшуєть ся напруга на освітлювальних пристроях 12 і вони гаснуть. На вхід "Вмик/Вимик" блока керування освітлювальними пристроями 13 надходить напруга відповідна рівню логічної одиниці від блока керування 17. Транзистор V6 бло ка керування освітлювальними пристроями13 відкривається, блокуючи при цьому проходження сигналу Uцап ламп з блока керуван ня 17. Підключення сигналів з загального проводу 1 ("заг. 1"), з загального проводу 2 ("заг. 2") описано вище. Блок керуван ня 17 подає код завершення виконання команди "Вимик. освітлення" у переносний комп'ютер 25 по послі довному каналу. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у ча рунку команд вбудованого ОЗУ код, відмінний від тих, що ви користо вують ся у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову видобуває команду з чарунки команд вбудованого у ЦПУ ОЗУ і приступає до її дешифрації. Якщо код команди не відповідає коду команди "Вимик. освітлення", ЦПУ блока керування 17 порівнює його з кодом команди "Зупин трансфокатора". Якщо код команди співпав, то виконується відповідна підпрограма. При цьому на вхід трансфо катора 3 надхо дить нульова керуюча напруга з блока керування 17. Двигун трансфокатора зупиняється. Блок керуван ня 17 передає код завершення виконання команди "Зупин трансфо катора" у переносний комп'ютер 25 по послідовному каналу. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у чарун ку команд вбудованого ОЗУ код, відмінний від тих що використовуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову ви добуває команду з ча рунки команд вбудованого у ЦПУ ОЗУ і приступає до її де шифрации. Якщо код команди не відповідає коду команди "Зупин трансфокатора", ЦПУ блока керування 17 порівнює його з кодом команди "Стоп". Якщо код команди співпав, то виконується відповідна підпрограма. При цьому послідовно виконуються команди: "Зупин двигунів лівого і правого бортів", "Зупин пантографа", "Зупин башти", "Зупин камери", "Вимкнення освітлення", "Зупин трансфокатора", описаних вище. Блок керуван ня 17 передає код завершення команди "Стоп" у переносний комп'ютер 25 по послідовному каналу. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у чарун ку команд вбудованого ОЗУ код, відмінний від тих що використовуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову ви добуває команду з ча рунки команд вбудованого у ЦПУ ОЗУ і приступає до її де шифрації. Якщо код команди не відповідає коду команди "Стоп", ЦПУ блока керуван ня 17 порівнює його з кодом команди "Діагностика". Якщо код команди співпав, то виконується відповідна підпрограма діагностики описана вище. Блок керування 17 передає код завершення команди "Діагностика" в переносний комп'ютер 25 по послідовному каналу. Відповідне повідомлення з'являється на екрані останнього. ЦПУ блока керування 17 записує у чарун ку команд вбудованого ОЗУ код, відмінний від ти х що використуються у системі, і вертається у основну програму керування самохідним діагностичним роботом 1. ЦПУ блока керування 17 знову видобуває команду з ча рунки команд вбудованого у ЦПУ ОЗУ і приступає до її дешифрации. Якщо код команди не відповідає коду команди "Діагностика", тобто ЦПУ блока керування 17 не виявив жодного активного коду команди, останній приступає до перевірки стану блока кінцевих ви 16 40855 микачів 6. При цьому ЦПУ блока керування 17 зчитує стан блока кінцевих ви микачів 6 і аналізує його. Якщо кінцевий верхній вимикач пантографа знаходиться у ста ні "О", то ЦПУ блока керування 17 виконує команду "Зупин пантографа", описану вище, а якщо його стан відповідає рівню логічної одиниці, то ЦПУ блока керуван ня 17 аналізує стан кінцевого нижнього вимикача пантографа. Якщо його стан відповідає рівню логичного нуля, ЦПУ блока керування 17 виконує команду "Зупин пантографа", описану ви ще, а якщо йо го стан відповідає рівню логічної одиниці, то ЦПУ блока керування 17 аналізує стан кінцевого лівого ви микача башти. Якщо його стан відповідає рівню логічного нуля, то ЦПУ блока керуван ня 17 виконує команду "Зупин башти", описану ви ще, а якщо його стан відповідає рівню логічної одиниці, то ЦПУ блока керуван ня 17 аналізує стан кінцевого правого вимикача башти. Якщо його стан відповідає рівню логічного нуля, то ЦПУ блока керування 17 також виконує команду "Зупин башти", описану вище, а якщо його стан відповідає рівню логічної одиниці, то ЦПУ блока керуван ня 17 аналізує стан кінцевого верхн ього ви микача камери. Якщо його стан відповідає рівню логічного нуля, то ЦПУ блока керування 17 виконує команду "Зупин камери", описану вище, а якщо його стан відповідає рівню логічної одиниці, то ЦПУ блока керування 17 аналізує стан кінцевого нижнього вимикача камери. Якщо його стан відповідає рівню логічного нуля, то ЦПУ блока керування 17 також виконує команду "Зупин камери", а якщо його стан рівно рівню логічної одиниці, то ЦПУ блока керування 17 приступає до визначене значень живильних напруг і струмів, що споживаються самохідним діагностичним роботом 1. При цьому ЦПУ блока керування 17 визначає значення живильних напруг:+5В,+15В,+12В, - 15В, що подаються через дільники напруг на входи багато канального вбудованого у ЦПУ блока керування 17 аналого-цифрового перетво рювача (АЦП), блок керування 17 послідовно видає двійкові коди 0001-1010 на шину КЗ - КО відповідно. При цьому напруга, що знімається з датчиків струмів R1 -R10 послідовно підключається до входу U ацп блока керування 17. Робота пристрою контролю 16 при зніманні напруг з датчиків струмів R1 - R10, описана вище. ЦПУ блока керування 17 послідовно вимірює струми споживаючі самохідним діагностичним роботом 1. Виміряні значення живильних напруг, струмів, що споживаються діагностичним роботом 1 і значень уклону тр убопроводу, що знімаються з датчика уклону 7 запам'ятаються у визначених чарунках вбудованого у ЦПУ ОЗУ блока керування 17 і передаються по послідовному каналу у персональний комп'ютер 25. Ці значення з'являються на екрані останнього. ЦПУ блока керування 17 знову видобуває команду з ча рунки команд вбудованого у ЦПУ ОЗУ і приступає до її де шифрації. Описаний вище алгоритм читання команд з ОЗУ блока керування 17 і їх дешифрація виробляється самохідним діагностичним роботом 1 безупинно до моменту йо го вимкнення оператором. У салоні лабораторії розміщено пристрій керування, живлення і візуалізації інформації з діагностичного робота 2. Блок акумуляторів 7 живить переносний комп'ютер 25, блок живлення діагнос тичного робота 26, знакогенератор 29, відеомагнітофон 30. Те левізор живиться від сво го блока живлення 28. Зображення фо кусоване трансфокатором 3 надхо дить на прилад з зарядовим зв'язком відеокамери 4, де воно перетворюється у електричний сигнал, посилюється відеопідсилювачем 5 і по кабелю 32 надхо дить на перший вхід знакогенератора 29, де він складається з сигналом датчика шляху 24. Сумарний відеосигнал з виходу знакогенератора 29 надхо дить на перші входи відеомагнітофону 30 і телевізора 31, сигнал з виходу якого для синхронізація знакогенератора 29 надходить на другий вхід останнього. Відеомагнітофон 30 запам'ятовує ві деосигнал на магнітній плівці, а на телевізорі 31 він візуалізується. Складання сигналів, що надходять від датчика шляху 24 з сигналом, що знімається з відеокамери 4 дозволяє виробляти прив'язку дільниці внутрішньої поверхні трубопроводу, що діагностується з відстанню від крапки початку діагностики. Сигнал від датчика шляху 24 разом з зображенням внутрішньої поверхні трубопроводу візуалізується на екрані кольорового телевізора 31 і запам'ятовуєть ся на магнітній стрічці відеомагнітофо ну 30. На екрані переносного комп'ютера 25 зображене меню команд самохідного діагностичного робота 1 і візуалізуються параметри його стану і хід виконання команд. Необхідну команду, у залежності від конкретної ситуа ції всередині трубопроводу, оператор вибирає з наведеного меню за допомогою клавіатури або "Ми шки", що вхо дять у комплект переносного комп'ютера 25. Зв'язок самохідного діагностичного робота 1 і переносного комп'ютера 25 здійснюється через послідовний порт, також що є складником переносного комп'ютера 25. Для зв'язку використовуються стандартні, гостировані сигнали послідовного каналу TxD і RxD. По сигналу TxD у послідовному коді передаються команди керуван ня самохідним діагностичним роботом 1, а по сигналу RxD переносний комп'ютер 25 отримує від останнього параметри його стану і хід їх ви конання. Блок живлення діагностичного робота 26 стабілізує си лову живильну напругу +27В, що використовуєть ся у діагностичному роботі 1, виключаючи вплив падіння напруги на кабелю 32 у залежності від зміни навантаження самохідного діагностичного робота 1. Самохідний діагностичний робот 1 з пристроєм керуван ня, живлення і візуалізації отриманої інфор мації 2 зв'язаний багатожильним кабелем 32, намотаним на консольну лебідку 35, ззаду якої на одній осі розміщена лебідка з намотаним страховальним тросом 36, другий кінець якого з'єднаний з самохідним діагностичним роботом 1. Кожна лебідка постачена храповим механізмом. Подача живильних напруг і керуючих сигналів від пристрою керування живлення і візуалізації отриманої інфор мації 2 до самоходного діагностичного робота 1, а та кож прийом відеозображення і зміряних параметрів від останнього до пристрою керування, живлення і візуалізації отриманої інформації 2 здійснюється за допомогою вбудованого у кабельну консольную лебідку 35 багато канального електричного колектора 38. Кабельна консольна лебід 17 40855 ка 35 для зручності експлуа тації постачена ручним пантографічним укладачем. Для подачі кабеля і страховального троса у тр убопровод лебідка 34 постачена блоком 33. У нинішній час виготовлений експериментальний зразок системи, що пропонується. Його випробуван ня показують великі функціональні можливості, гарну маневреність, зручність експлуа тації, швидке знаходження місця і характеру пошкодження трубопроводів, ви соку надійність системи телеінспекції трубопроводів. Джерела інформації: 1. Патент Великобританії. №2190722, МКИ H04N 7/18, НКИ F2P, H4F, бюл.№ 6 ,1989г. 2. Патент Швейцарії № 672539, МКИ F16L 55/18, бюл. №13, 1990 г. 3. Патент США №5084764, МКИ H04N 7/18, НКИ 358-100, N8, 1993 г. 4. Заявка ЕПВ №0504591, МКИ H04N 7/18, F16L 55/26, G01 N21/00, бюл. №1, 1994г. Фіг. 1 18 40855 Фіг. 2 Фіг. 3 19 40855 Фіг. 4 Фіг. 5 20 40855 Фіг. 6 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 21 40855 22
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of pipelines tele-inspection
Автори англійськоюMaslak Viktor Mykolaiovych, Baranov Yurii Viacheslavovych
Назва патенту російськоюСистема телеинспекции трубопроводов
Автори російськоюМаслак Виктор Николаевич, Баранов Юрий Вячеславович
МПК / Мітки
МПК: F16L 55/16
Мітки: трубопроводів, телеінспекції, система
Код посилання
<a href="https://ua.patents.su/22-40855-sistema-teleinspekci-truboprovodiv.html" target="_blank" rel="follow" title="База патентів України">Система телеінспекції трубопроводів</a>
Нашоломна бінокулярна індикаторна система
Номер патенту: 34642
Опубліковано: 15.03.2001
Автори: Кондратов Петро Олександрович, Шклярський Володимир Іванович, Гой Віталій Миколайович
МПК: H04N 5/74, G02B 5/08, G02B 6/43
Мітки: індикаторна, система, бінокулярна, нашоломна
Формула / Реферат:
Нашоломна бінокулярна індикаторна система, яка містить канал для правого ока. що складається з оптично спряжених першого проекційного кінескопа, першого об'єктива, першого поворотного дзеркала та канал для лівого ока, що складається з оптично спряжених другого проекційного кінескопа, другого об'єктива, другого поворотного дзеркала, а також блок керування, електрично зв'язаний із виводами проекційних кінескопів, яка відрізняється тим, що у...
Система для контролю стану підземних трубопроводів
Номер патенту: 44566
Опубліковано: 15.02.2002
Автори: Іванський Федір Дмитрович, Аленков Юрій Анатолійович
МПК: F17D 5/00
Мітки: трубопроводів, стану, контролю, підземних, система
Формула / Реферат:
1. Система для контролю стану підземних трубопроводів, що включає датчик-сигналізатор, яка відрізняється тим, що вона має дренажний трубопровід з боковими отворами вздовж всієї його довжини, розміщеними паралельно і збоку від контрольованого трубопроводу таким чином, що дно дренажного трубопроводу знаходиться нижче дна контрольованого трубопроводу на 1/3-1/4 діаметра дренажного трубопроводу, навкруги дренажного трубопроводу улаштований...
Спосіб випробування трубопроводів і пристрій для контролю трубопроводів
Номер патенту: 44371
Опубліковано: 15.02.2002
Автори: Ремшо Джеймс Едвард, Берд Джон Ферріс
МПК: G01N 27/90
Мітки: трубопроводів, спосіб, пристрій, контролю, випробування
Формула / Реферат:
1. Пристрій для контролю трубопроводів, який переміщується по трубопроводу і включає в себе генераторний засіб для генерації поля вихрових струмів всередині трубопроводу і детекторний засіб для виявлення результуючого поля, який відрізняється тим, що пристрій контролю виконаний з можливістю визначення наявності дефектів в трубопроводах як з чорних, так і з кольорових металів, причому детекторний засіб містить перший і другий приймачі,...
Система керування об’єктом із запізнюванням
Номер патенту: 34774
Опубліковано: 15.03.2001
Автори: Жиляков Віктор Іванович, Ткачов Роман Юрійович
МПК: G05B 13/02
Мітки: запізнюванням, керування, система, об'єктом
Формула / Реферат:
Система керування об'єктом із запізнюванням, що містить послідовно сполучені: перший елемент порівняння, перший регулятор, об'єкт із запізнюванням, другий елемент порівняння, а також залучену до виходу першого регулятора модель чистого запізнювання і залучену до входу другого елемента порівняння першу модель інерційної частини об'єкта, яка відрізняється тим, що вона додатково обладнана другою моделлю інерційної частини об'єкта, другим...
Система керування і контролю сільського телефонного зв’язку
Номер патенту: 47931
Опубліковано: 15.07.2002
Автори: Рильський-Риловніков Ігор Тимофійович, Охріменко Тетяна Іванівна, Мисливцева Олена Володимирівна, Дубовик Ігор Васильович, Ольховський Віктор Петрович
МПК: H04M 3/22
Мітки: контролю, сільського, телефонного, система, зв'язку, керування
Формула / Реферат:
1. Система керування і контролю сільського телефонного зв'язку, яка містить центральну автоматичну телефонну станцію, кінцеву автоматичну телефонну станцію, два блоки контролю, з'єднані послідовно перший блок ущільнення, лінію зв'язку і другий блок ущільнення, яка відрізняється тим, що введені узгоджуючий пристрій, два перетворювачі, блок датчиків позастанційних параметрів, диспетчерський пульт, який містить електронну обчислювальну машину,...
Попередній патент: Пристрій для формування неперервного волокна із розплаву основних гірських порід
Наступний патент: Універсальний шарнір
Випадковий патент: Спосіб одержання соєвих напоїв