Система керування об’єктом із запізнюванням
Номер патенту: 34774
Опубліковано: 15.03.2001
Формула / Реферат
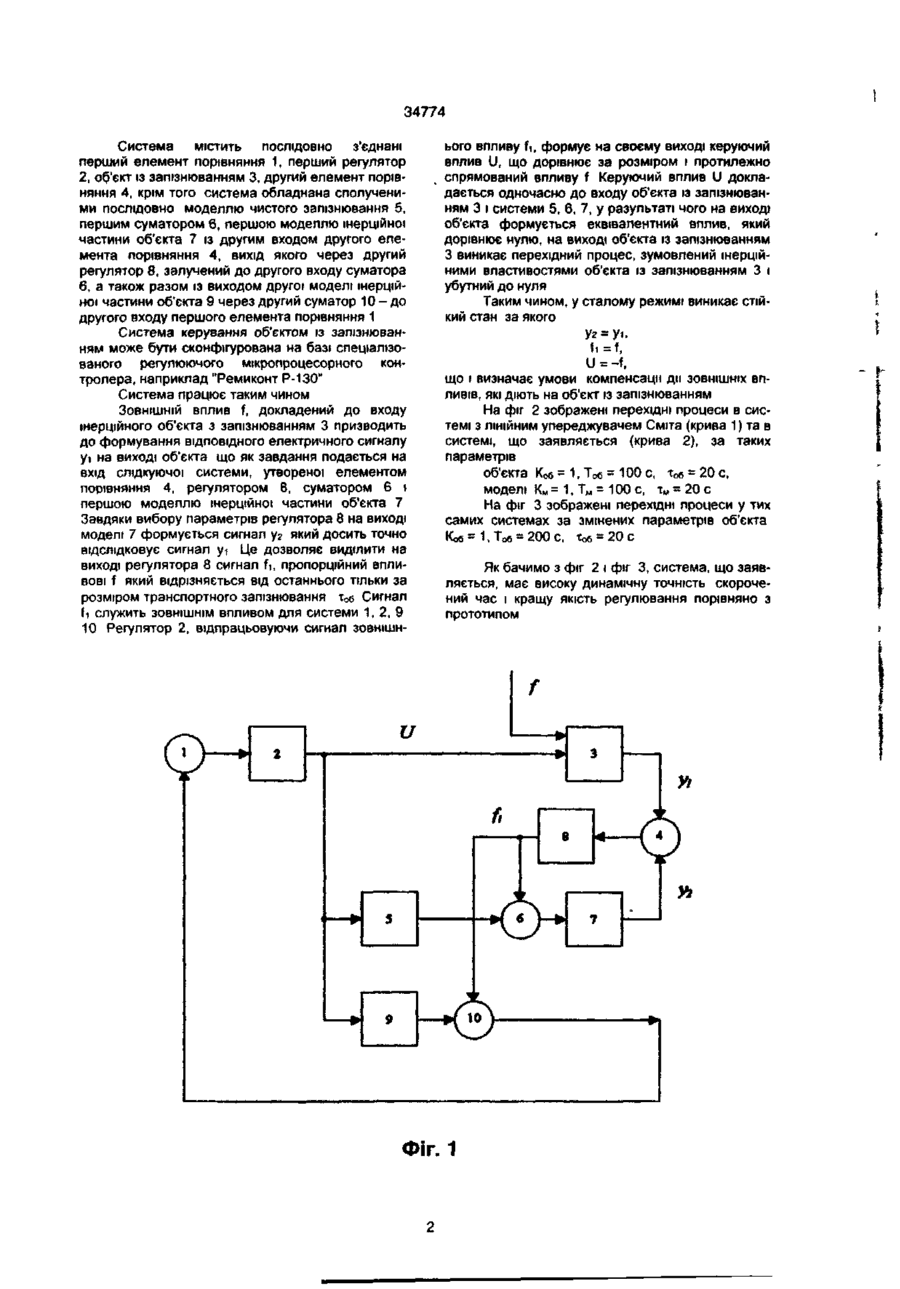
Система керування об'єктом із запізнюванням, що містить послідовно сполучені: перший елемент порівняння, перший регулятор, об'єкт із запізнюванням, другий елемент порівняння, а також залучену до виходу першого регулятора модель чистого запізнювання і залучену до входу другого елемента порівняння першу модель інерційної частини об'єкта, яка відрізняється тим, що вона додатково обладнана другою моделлю інерційної частини об'єкта, другим регулятором, першим і другим суматорами, причому вхід другої моделі інерційної частини об'єкта залучений до виходу першого регулятора, вхід другого регулятора - до виходу другого елемента порівняння, а його вихід разом із виходом моделі чистого запізнювання через перший суматор залучений до входу першої моделі інерційної частини об'єкта, а також разом із виходом другої моделі інерційної частини об'єкта через другий суматор - до другого входу першого елемента порівняння.
Текст
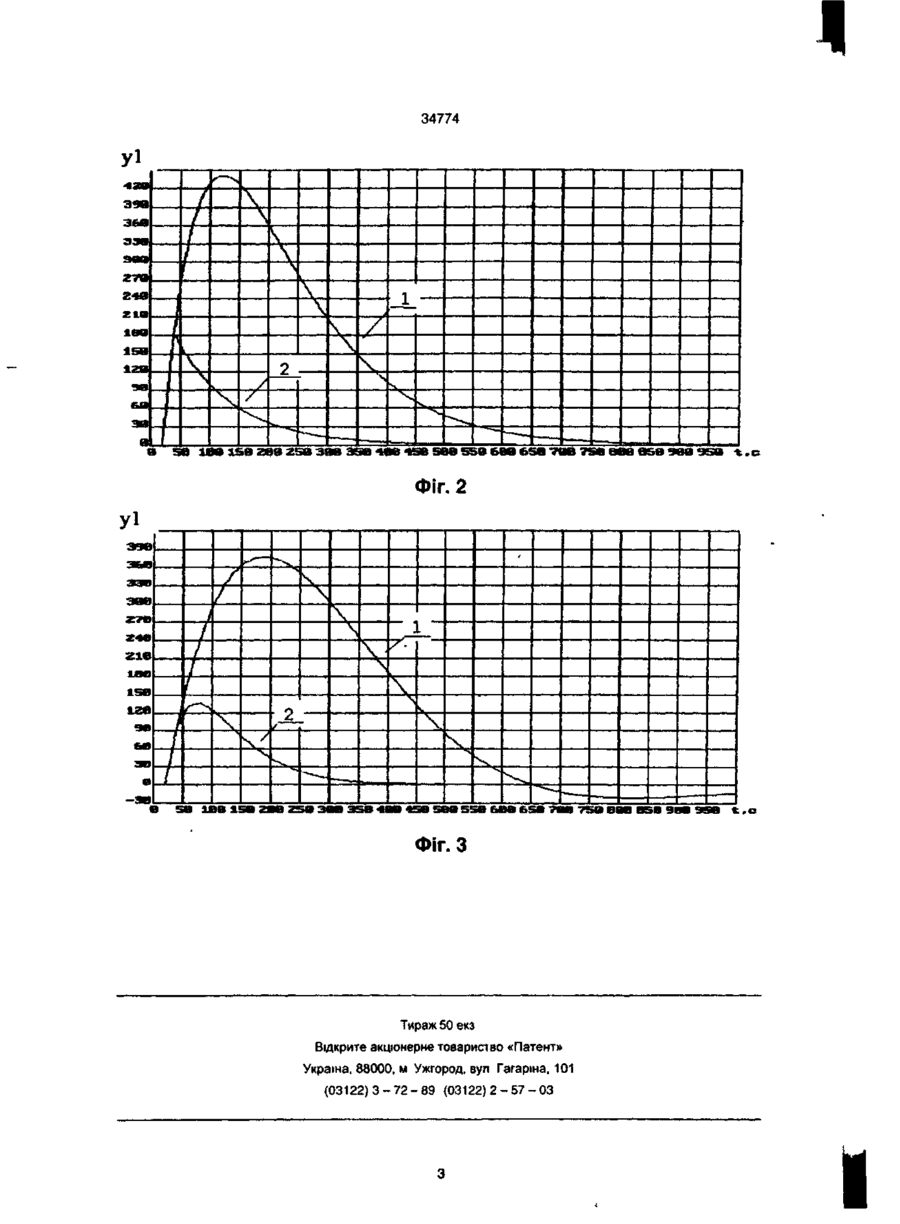
Система керування об'єктом із запізнюванням^ що містить послідовно сполучені перший елемент порівняння, перший регулятор, об'єкт із запізнюванням другий елемент порівняння, а також залучену до виходу першого регулятора модель чистого запізнювання і залучену до входу другого еле мента порівняння першу модель інерційної частини об'єкта яка відрізняється тим, що вона додатково обладнана другою моделлю інерційної частини об'єкта другим регулятором, першим t другим суматорами причому вхід другої моделі інерційної частини об'єкта залучений до виходу першого регулятора вхід другого регулятора - до виходу другого елемента порівняння, а його вихід разом із виходом моделі чистого запізнювання через перший суматор залучений до входу першої моделі інерційної частини об'єкта, а також разом із виходом другої моделі інерційної частини об'єкта через другий суматор - до другого входу першого елемента порівняння Винахід належить до систем автоматичного керування об'єктами із суттєвим запізнюванням і може бути використаний в металургійній, ХІМІЧНІЙ І гірничій промисловості Відома система керування об'єктами із запізнюванням по відхиленню з застосуванням упереджувача Сміта, що дозволяє компенсувати вплив запізнювання на усталеність замкнутої системи [Бакли П С Автоматическое регулирование процессов с чистым запаздыванием Труды I международного конгресса ИФАК по автоматическому управлению М АН СССР -1960 - С 95-111] Проте недоліком даної системи є незадовільна якість регулювання об'єкта за дією ЗОВНІШ Технічним завданням винаходу є створення такої системи керування об'єктами із запізнюванням, у котрої додаткове введення другого регулятора, другої моделі інерційної частини об'єкта і суматорів дозволяє підвищити динамічну точність, скоротити час регулювання і зменшити коливальність перехідного процесу в замкнутій системі Поставлене завдання досягається тим, що система керування об'єктом із запізнюванням, що містить послідовно сполучені перший елемент порівняння, перший регулятор, об'єкт із запізнюванням другий елемент порівняння, а також залучену до виходу першого регулятора модель чистого запізнювання і залучену до входу другого елемента порівняння першу модель інерційної частини об'єкта, ВІДПОВІДНО до винаходу додатково обладнана другою моделлю інерційної частини об'єкта, другим регулятором, першим і другим суматорами, причому вхід другої моделі інерційної частини об'єкта залучений до виходу першого регулятора, вхід другого регулятора - до виходу другого елемента порівняння, а його вихід разом із виходом моделі чистого запізнювання через перший суматор залучений до входу першої моделі інерційної частини об'єкта а також разом із виходом другої моделг інерційної частини об'єкта через другий суматор - до входу першого елемента порівняння На фіг 1 наведена схема виконання системи керування об'єктом із запізнюванням НІХ ВПЛИВІВ Найбільш близькою за технічною сутністю до системи, що заявляється, є система регулювання, яка містить послідовно сполучені перший елемент порівняння, регулятор інерційний об'єкт із запізнюванням другий елемент порівняння а також сполучений із виходом регулятора ЛІНІЙНИЙ упереджувач Сміта з другим елементом порівняння, вихід якого сполучений із другим входом першого елемента порівняння [Догановский С А , Иванов В А Устройства запаздывания и их применение в автоматических системах М Машиностроение -1966 - С 261-267] Недоліком прототипу є тривалий час регулювання, коливальність перехідного процесу незадовільна точність і якість регулювання CO at 34774 Система містить послідовно з'єднані перший елемент порівняння 1, перший регулятор 2, об'єкт із запізнюванням 3, другий елемент порівняння 4, крім того система обладнана сполученими послідовно моделлю чистого запізнювання 5, першим суматором 6, першою моделлю інерційної частини об'єкта 7 «з другим входом другого елемента порівняння 4, вихід якого через другий регулятор 8, залучений до другого входу суматора 6, а також разом із виходом другої моделі інерційної частини об'єкта 9 через другий суматор 10 - до другого входу першого елемента порівняння 1 Система керування об'єктом із запізнюванням може бути сконфігурована на базі спеціалізованого регулюючого мікропроцесорного контролера, наприклад "Ремиконт Р-130" Система працює таким чином ЗОВНІШНІЙ ВПЛИВ f, докладений до входу інерційного об'єкта з запізнюванням 3 призводить до формування ВІДПОВІДНОГО електричного сигналу уі на виході об'єкта що як завдання подається на вхід слідкуючої системи, утвореної елементом порівняння 4, регулятором 8, суматором 6 і першою моделлю інерційної частини об'єкта 7 Завдяки вибору параметрів регулятора 8 на виході моделі 7 формується сигнал уг який досить точно відслідковує сигнал уі Це дозволяє виділити на виході регулятора 8 сигнал fi, пропорційний впливові f який відрізняється від останнього тільки за розміром транспортного запізнювання Т б Сигнал о fi служить ЗОВНІШНІМ впливом для системи 1, 2, 9 10 Регулятор 2, відпрацьовуючи сигнал зовнішн ього впливу fi, формує на своєму виході керуючий вплив U, що дорівнює за розміром і протилежно спрямований впливу f Керуючий вплив U докладається одночасно до входу об'єкта із запізнюванням 3 і системи 5, 6, 7, у результаті чого на виході об'єкта формується еквівалентний вплив, який дорівнює нулю, на виході об'єкта із запізнюванням З виникає перехідний процес, зумовлений інерційними властивостями об'єкта із запізнюванням 3 і убутний до нуля Таким чином, у сталому режимі виникає стійкий стан за якого Уг = уі, fi=f, U = -f, що і визначає умови компенсації дії ЗОВНІШНІХ впливів, які діють на об'єкт із запізнюванням На фіг 2 зображені перехідні процеси в системі з ЛІНІЙНИМ упереджувачем Сміта (крива 1) та в системі, що заявляється (крива 2), за таких параметрів об'єкта Коб = 1, ТОб = 100 с, тОб = 20 с, моделі Км = 1, Тм = 100 с, їм = 20 с На фіг 3 зображені перехідні процеси у тих самих системах за змінених параметрів об'єкта Коб - 1, Тоб = 200 с, Тоб = 20 с Як бачимо з фіг 2 і фіг 3, система, що заявляється, має високу динамічну точність скорочений час і кращу якість регулювання порівняно з прототипом Фіг. 1 34774 уі 39в / / / SI / \ \ f I 1 f ч\ / 4 \ 36В ээв 27В Z4O 2 id \ 15В 1ZB 1 \ \ / \ і 2 \ / 4 / Эй я 0 > 1 Ч і hii *•' ' і • і ':• x n -'• і . ~ і SB If» ISO ZSe 2SB 3BB Э5В 408 4S« 5ЄЄ S5B 6ЄЄ 658 7OB 75B ЄВВ В5Є 9B0 95B ФІГ. 2 yi 39В ^—• зав зев Z7W» 1 / і І 2ХВ 15В _в аи в В ( К \ \ \. ^ . ^ \ \ 1 \ N Лч . о Z \ \ — *— • 5В 1ВВ Л5В гВВ 250 ЗВВ 35В 4ВВ 45В SBB 55В 6ВВ 65В 7ВВ 75В ВВВ В5В 90В 95В Фіг. З Тираж 50 екз Відкрите акціонерне товариство «Патент» Україна, 88000, м Ужгород, вул Гагаріна, 101 (03122)3-72-89 (03122)2-57-03 *.c
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem for object control with delay
Автори англійськоюZhyliakov Viktor Ivanovych, Tkachov Roman Yuriiovych
Назва патенту російськоюСистема управления объектом с запаздыванием
Автори російськоюЖиляков Виктор Иванович, Ткачев Роман Юрьевич
МПК / Мітки
МПК: G05B 13/02
Мітки: система, керування, об'єктом, запізнюванням
Код посилання
<a href="https://ua.patents.su/4-34774-sistema-keruvannya-obehktom-iz-zapiznyuvannyam.html" target="_blank" rel="follow" title="База патентів України">Система керування об’єктом із запізнюванням</a>
Копіювальна слідкуюча система пропорційного керування для металорізальних верстатів
Номер патенту: 9773
Опубліковано: 30.09.1996
Автори: Лавріненко Анатолій Костянтинович, Дубров Борис Іванович
МПК: B23Q 35/00
Мітки: керування, верстатів, слідкуюча, копіювальна, пропорційного, металорізальних, система
Формула / Реферат:
(57) Копировальная следящая система пропорционального управления для металлорежущих станков, содержащая копировальный датчик, предварительный усилитель-выпрямитель, усилители сигналов задающего и следящего каналов и электроприводов, отличающаяся тем, что она снабжена дистанционным регулятором чувствительности датчика, преобразователем уровня, блоком выделения модуля сигнала и нелинейными блоками, причем вход регулятора чувствительности...
Система керування механізованим заряджанням
Номер патенту: 32618
Опубліковано: 15.02.2001
Автори: Бестік Микола Іванович, Коробейніков Олег Павлович, Кас'ян Валерій Іванович, Петраченко Любов Парфенівна, Бакушин Анатолій Олексійович
Мітки: механізованим, заряджанням, система, керування
Текст:
...насосна установка 3 у вигляді гідронасосу, золотникової коробки, поповнюючого , баку та шлангів, описана на стор.100...106; - пристрій 4 ви давання снаряду в площин у заряджання містить конвеєр з лотками для снаря дів зі стопором і ме ханізмом повороту , золотни ком стопору, гідромотором і електромагнітом, описаний на стор 84...87, 100...107; - пристрій 5 стопоріння гармати на куті заряжання у вигляді гідромеханічного стопору гармати,...
Система керування вогнем танка
Номер патенту: 32632
Опубліковано: 15.02.2001
Автори: Фролов Леонід Андрійович, Бусяк Юрій Митрофанович, Руденко Микола Прохорович
МПК: F41G 5/00
Мітки: танка, керування, система, вогнем
Текст:
...з відомим контуром регулювання, що включає датчик кута вертикального наведення, балістичний обчислювач та привід наведення гармати, дозволило не тільки усунути ручні операції та автоматизувати процес узгодження лінії візування нічного прицілу з віссю каналу ствола гармати при подачі сигналу з виходу да тчика кута вертикального наведення і тим самим добитися скорочення часу для приведення . системи у стан го товності , а отже, і...
Система керування процесом розкладки та віджимання білизни
Номер патенту: 28700
Опубліковано: 16.10.2000
Автори: Малигін Олександр Вікторович, Чоловський Роман Генадійович, Ройзман Вілен Петрович
МПК: D06F 37/00, D06F 33/02
Мітки: віджимання, система, процесом, керування, білизни, розкладки
Формула / Реферат:
Система керування процесом розкладки та віджиму білизни, яка містить командоапарат, яка відрізняється тим, що додатково введено таймер паузи А1, таймер розкладки А2 та датчик вібрацій ДВ.
Система керування трансмісії гусеничної машини
Номер патенту: 791
Опубліковано: 15.03.2001
Автори: Кудров Володимир Михайлович, Зімін Дмитро Борисович, Магерамов Лютфалій Курбан-Алієвич, Істратов Анатолій Васильович, Литвин-Попович Ігор Анатолійович, Борисюк Михайло Дем'янович, Бусяк Юрій Митрофанович
МПК: F16N 25/00, B62D 11/00
Мітки: керування, трансмісії, система, машини, гусеничної
Формула / Реферат:
Система керування трансмісії гусеничної машини, яка включає для кожного борту механізм розподілу, що містить картер з каналами подачі масла до бустерів фрикціонів коробки передач і розміщені в картері кулак перемикача передач і кулак повороту, пластина якого виконана у вигляді сектора з боковою профільованою поверхнею, яка відрізняється тим, що в кожний механізм розподілу введений двопозиційний чотириходовий золотник, розміщений у виконаній у...
Попередній патент: Спосіб лікування аномалій положення зубів, що обумовлені наявністю ретенованих надкомплектних
Наступний патент: Вибухобезпечний електродвигун
Випадковий патент: Пристрій для безупинного обрізування корінця книжкового блока і підготовки його до нанесення клею