Клиновий механізм з приймачем повзуна
Формула / Реферат
1. Клиновий механізм (1), що включає приймач (2) повзуна, рухомий повзун (3) і привідний елемент (5), причому між повзуном (3) і привідним елементом (5) передбачені поверхні (301, 302) ковзання, при цьому між повзуном (3) і приймачем (2) повзуна розташована напрямна (6) у формі ластівчина хвоста або призми, з поверхнями (31-34) ковзання на повзуні (3) і поверхнями (21-24) ковзання на приймачі (2) повзуна, який відрізняється тим, що передбачені на повзуні (3) поверхні (32, 34) ковзання, через які передаються сили від приймача (2) повзуна на повзун (3) в процесі робочого ходу, при якому повзун (3) переміщається назовні, знаходячись між привідним елементом (5) і приймачем (2) повзуна, розташовані під кутом одна до одної.
2. Клиновий механізм за п. 1, який відрізняється тим, що поверхні (32, 34) ковзання, через які передаються сили в процесі робочого ходу, більші, ніж передбачені на повзуні (3) поверхні (31, 33) ковзання, через які передаються сили від приймача (2) повзуна на повзун (3) при зворотному ході, в процесі якого приймач (2) повзуна віддаляється від привідного елемента (5).
3. Клиновий механізм за п. 1 або 2, який відрізняється тим, що напрямна (6) у формі ластівчина хвоста або призми включає щонайменше дві розташовані під кутом одна до одної напрямні пластини.
4. Клиновий механізм за п. 3, який відрізняється тим, що напрямні пластини (26, 27) напрямної (6) у формі ластівчина хвоста або призми мають, в загальному випадку, L-подібний переріз.
5. Клиновий механізм за будь-яким з пп. 3, 4, який відрізняється тим, що в ньому передбачені дві напрямні пластини (36, 37, 38, 39), розташовані під кутом одна до одної.
6. Клиновий механізм за будь-яким з пп. 1-5, який відрізняється тим, що напрямна (6) у формі ластівчина хвоста або призми включає з'єднання з геометричним замиканням повзуна (3) і приймача (2) повзуна.
7. Клиновий механізм за будь-яким з пп. 3-6, який відрізняється тим, що приймач (2) повзуна в зоні поверхонь (21, 22, 23, 24) ковзання та/або приймальна частина напрямних пластин (26, 27) виконані виступними.
8. Клиновий механізм за будь-яким з пп. 3-7, який відрізняється тим, що напрямні пластини (26, 27, 36, 37, 38, 39) приймача (2) повзуна та/або повзуна (3) виконані знімними і закріплені, зокрема, за допомогою кріпильних гвинтів (28, 29).
9. Клиновий механізм за будь-яким з пп. 1-8, який відрізняється тим, що між повзуном (3) і привідним елементом (5) передбачена клинова напрямна.
10. Клиновий механізм за п. 9, який відрізняється тим, що клинова напрямна (50, 300) містить дві розташовані під кутом одна до одної напрямні пластини (303, 304).
11. Клиновий механізм за будь-яким з пп. 9-10, який відрізняється тим, що на повзуні (3) передбачені розташовані під кутом одна до одної напрямна (6) у формі ластівчина хвоста або призми і клинова встановлювальна поверхня (300).
12. Клиновий механізм за будь-яким з пп. 9-11, який відрізняється тим, що напрямна (6) у формі ластівчина хвоста або призми і клинова напрямна передбачені на двох суміжних сторонах повзуна (3).
13. Повзун (3) для клинового механізму (1), що включає крім того приймач (2) повзуна і привідний елемент (5), причому повзун (3) розташований між приймачем (2) повзуна і привідним елементом (5), при цьому повзун (3) містить боковину (30), виконану у формі ластівчина хвоста або призми з поверхнями (31-34) ковзання, який відрізняється тим, що передбачені на повзуні (3) поверхні (32, 34) ковзання, через які передаються сили від приймача (2) повзуна на повзун (3) в процесі робочого ходу, при якому повзун (3) переміщається назовні, знаходячись між привідним елементом (5) і приймачем (2) повзуна, розташовані під кутом одна до одної.
14. Повзун за п. 13, який відрізняється тим, що передбачені на повзуні (3) поверхні (32, 34) ковзання, через які передаються сили в процесі робочого ходу, більші, ніж передбачені на повзуні (3) поверхні (31, 33) ковзання, через які передаються сили від приймача (2) повзуна на повзун (3) при зворотному ході, в процесі якого приймач (2) повзуна віддаляється від привідного елемента (5).
15. Повзун за одним з пп. 13 або 14, який відрізняється тим, що боковина, виконана у формі ластівчина хвоста або призми, містить як напрямні пластини (36, 37, 38, 39) поверхні прилягання, особливо, для пристикування напрямних пластин.
16. Повзун за п. 15, який відрізняється тим, що в ньому передбачені дві напрямні пластини (36, 37, 38, 39), розташовані під кутом одна до одної.
17. Повзун за п. 13, який відрізняється тим, що в ньому, разом з першою, виконаною у формі ластівчина хвоста або призми боковиною (30), передбачена друга, суміжна боковина, що містить щонайменше одну клинову встановлювальну поверхню (300) для з'єднання з привідним елементом (5).
18. Повзун за п. 17, який відрізняється тим, що в ньому передбачена щонайменше одна напрямна пластина (303, 304) для стикування щонайменше з однією клиновою напрямною поверхнею.
19. Повзун за п. 13, який відрізняється тим, що повзун (3) має третю, суміжну з двома іншими сторонами, сторону, яка має ділянку для монтажу кріплення оброблювального інструмента.
20. Повзун за п. 19, який відрізняється тим, що на третій стороні є щонайменше два піднутрення та/або два пази (41) для вставляння виступних елементів (40) засобу (4) для кріплення оброблювального інструмента.
21. Повзун за п. 19 або 20, який відрізняється тим, що на третій стороні повзуна передбачена щонайменше одна клинова поверхня.
Текст
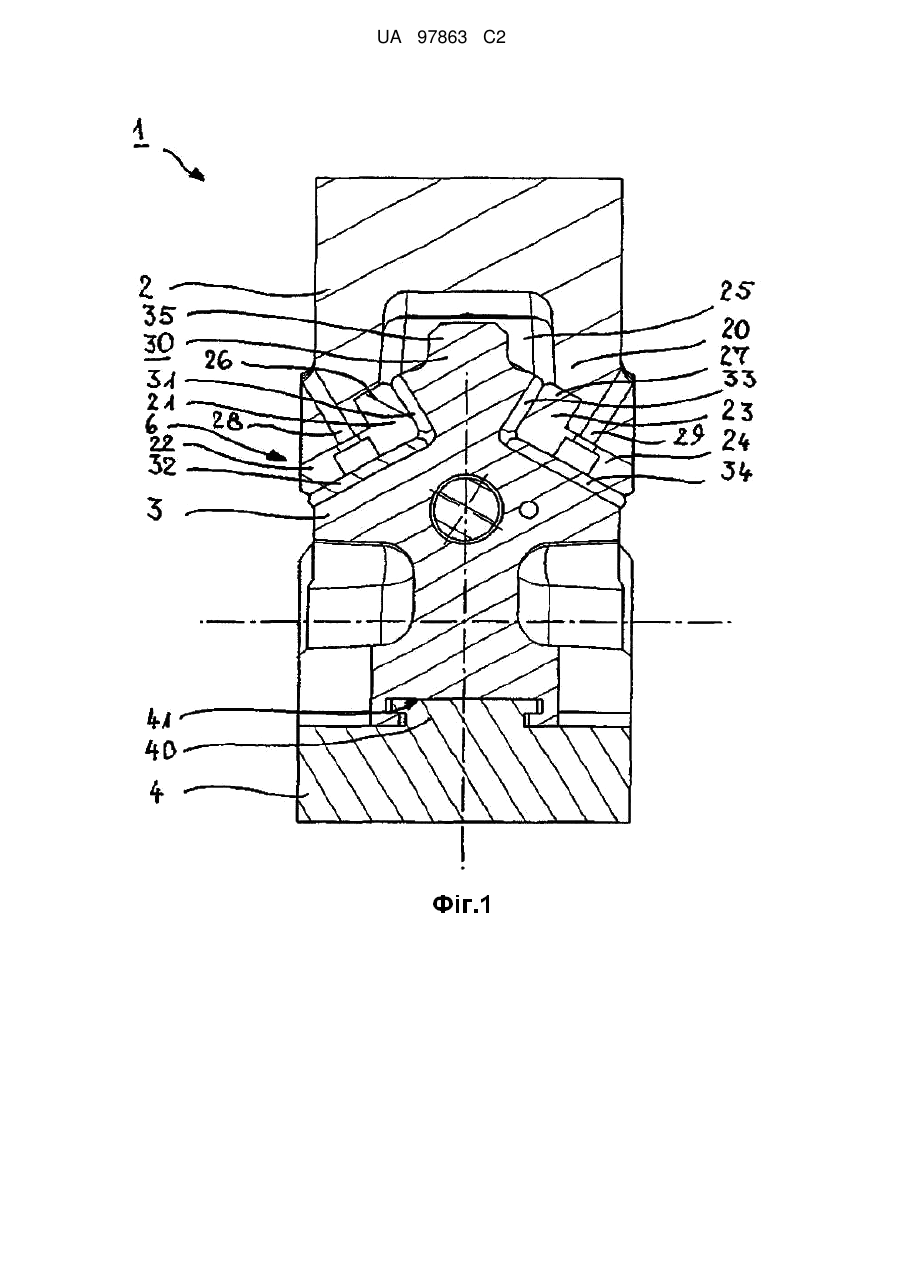
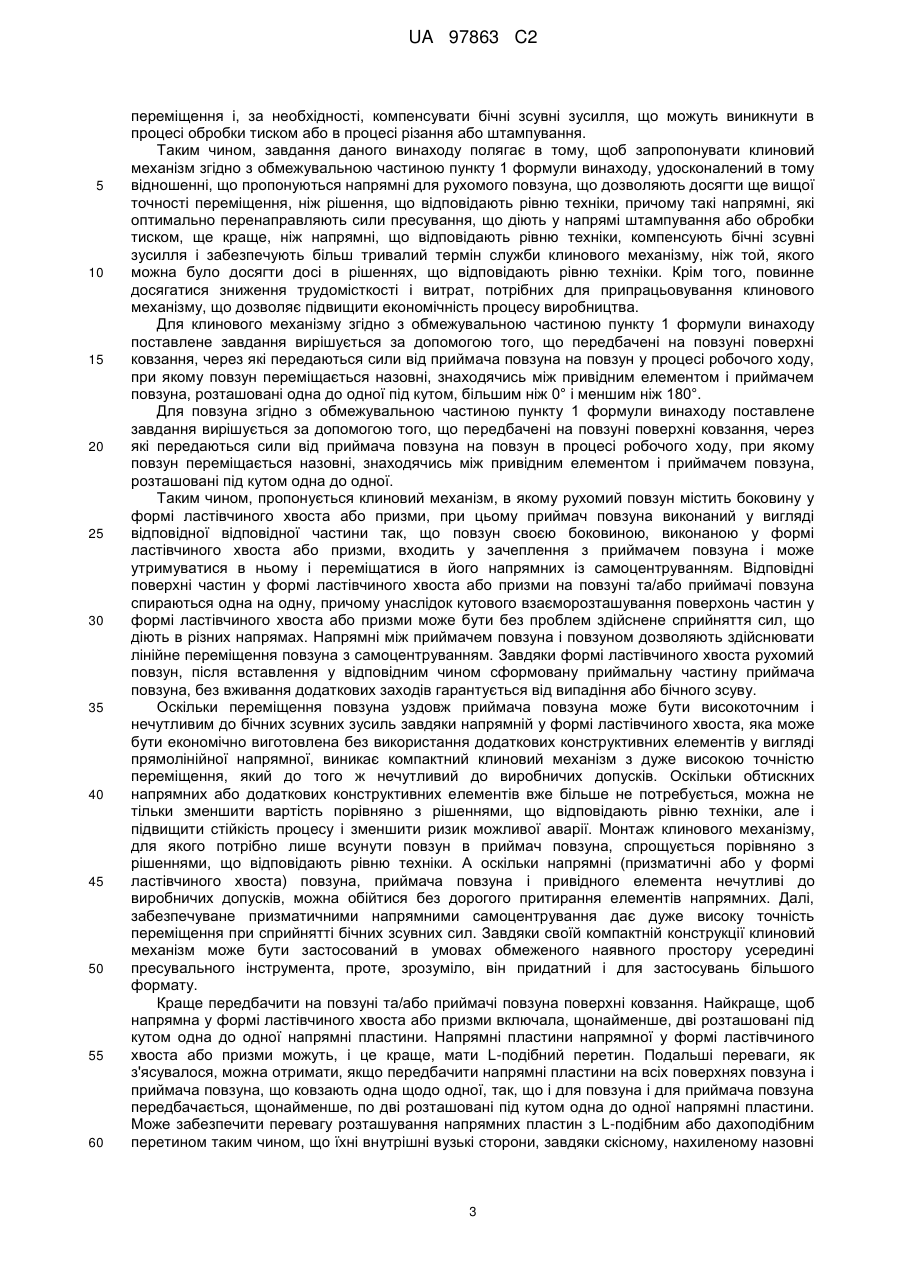
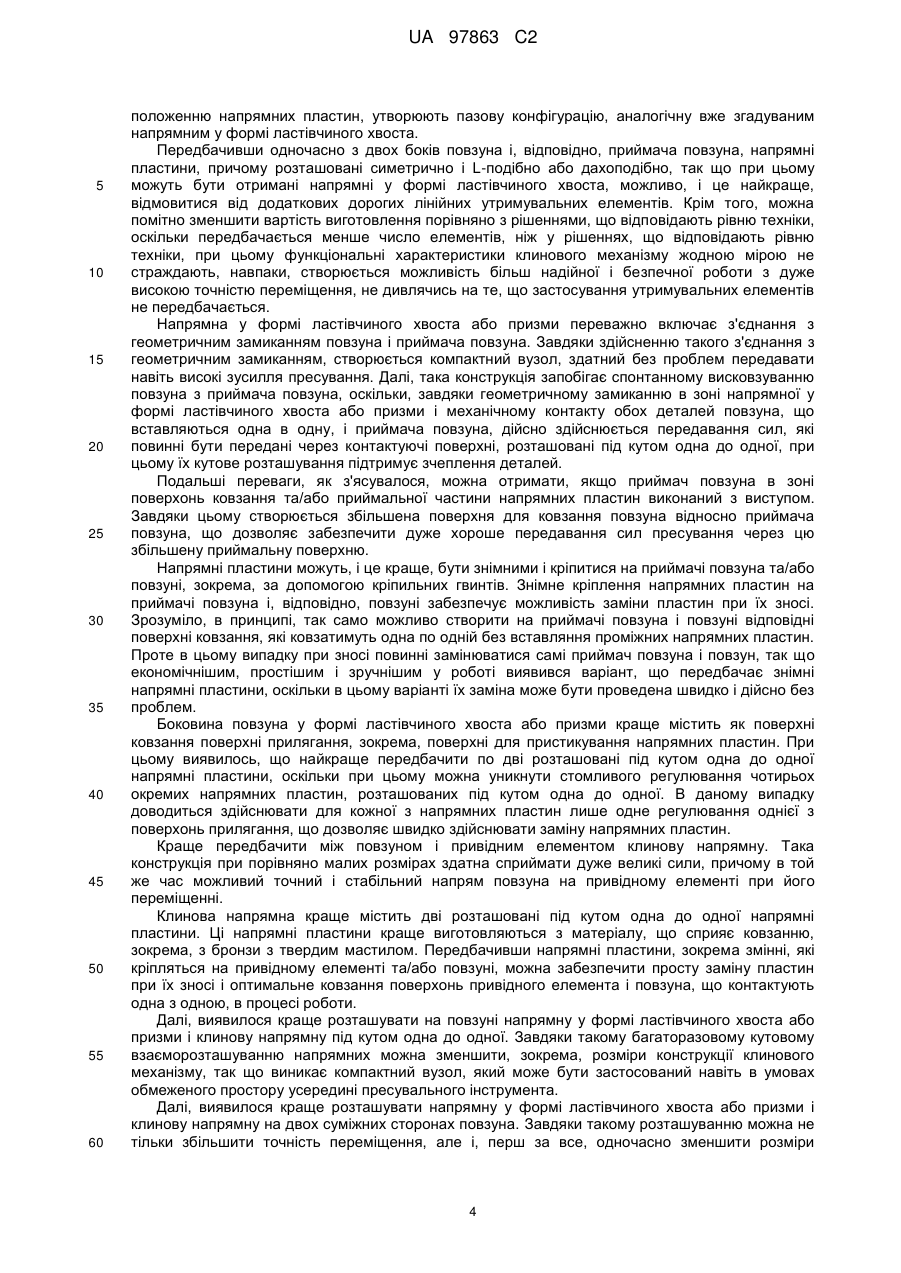
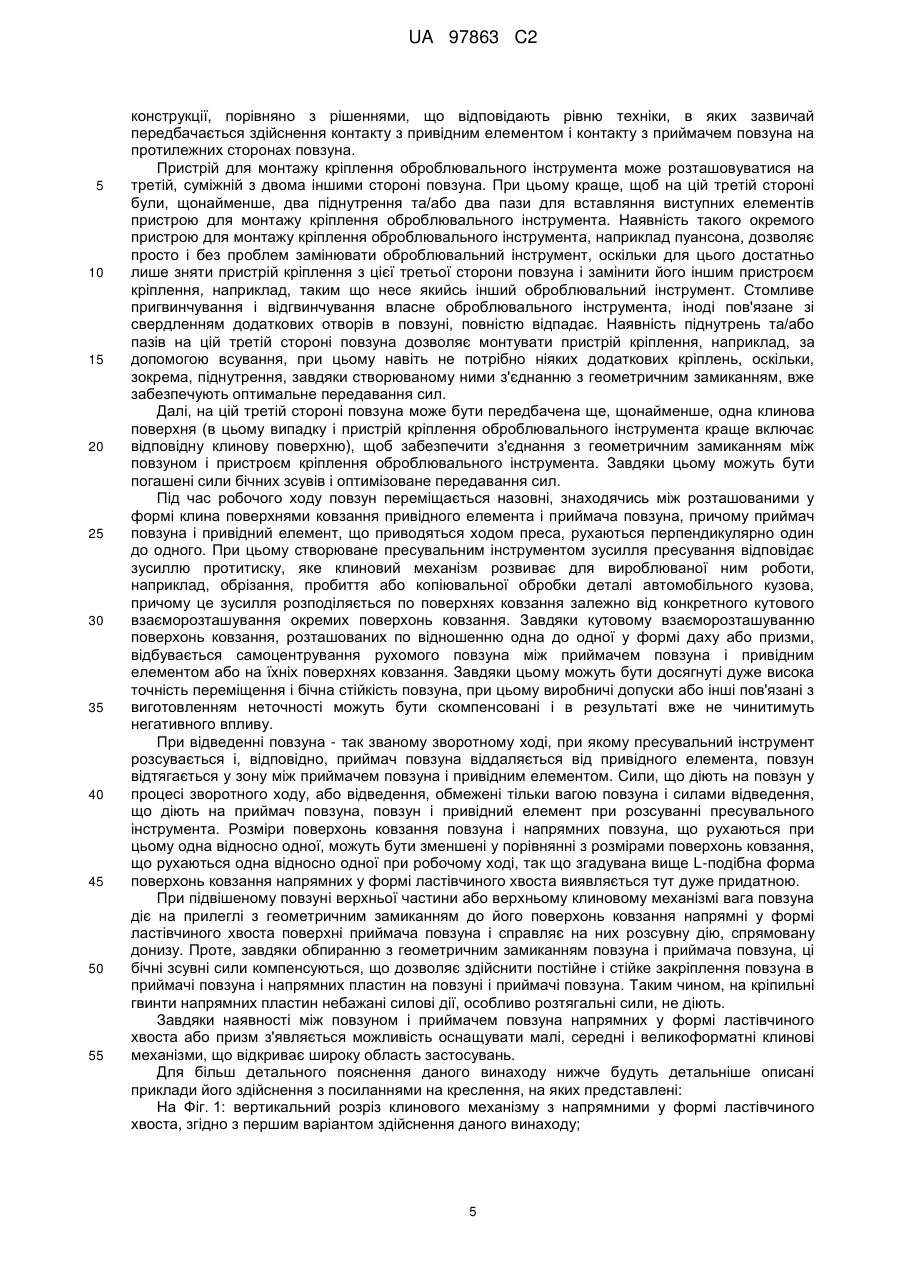
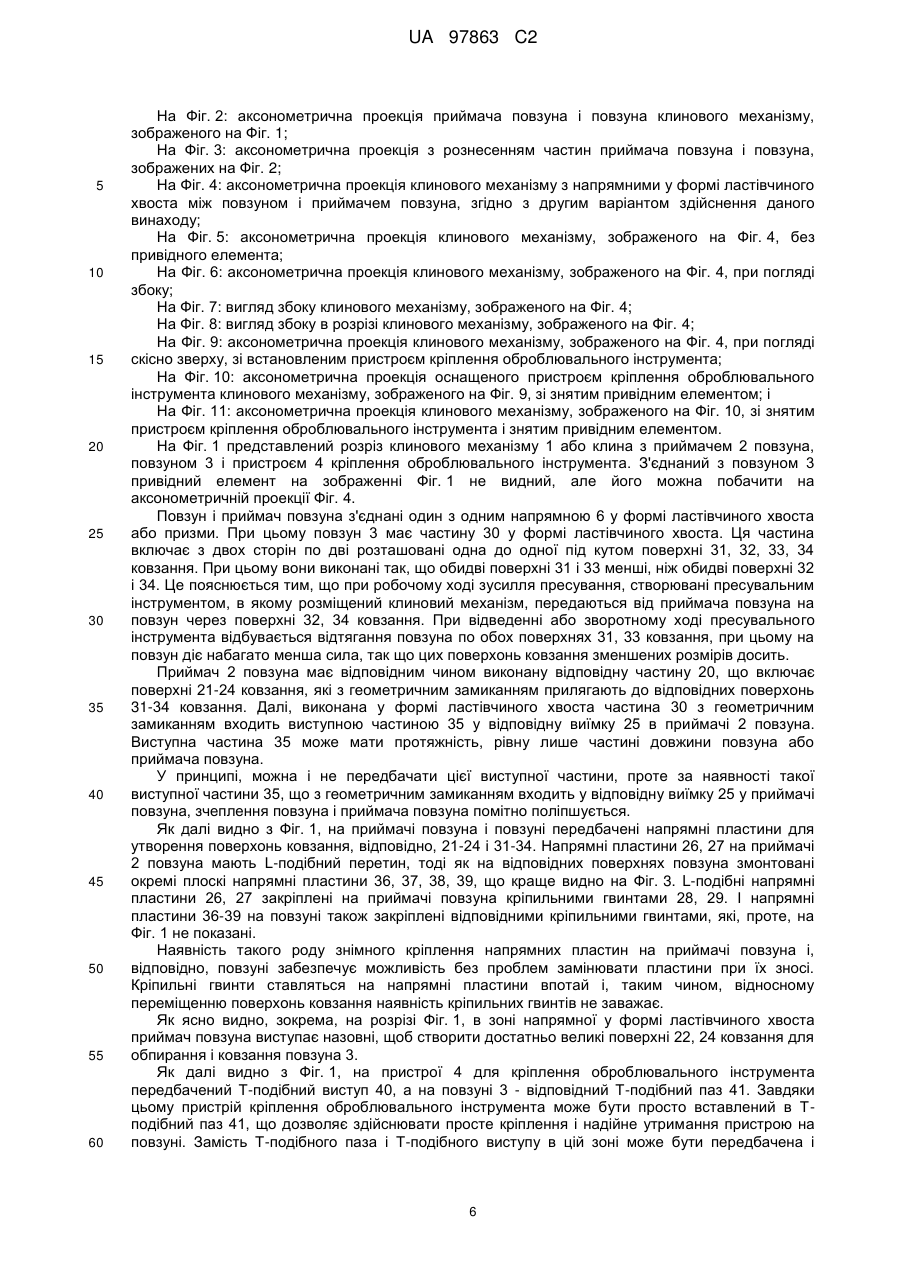
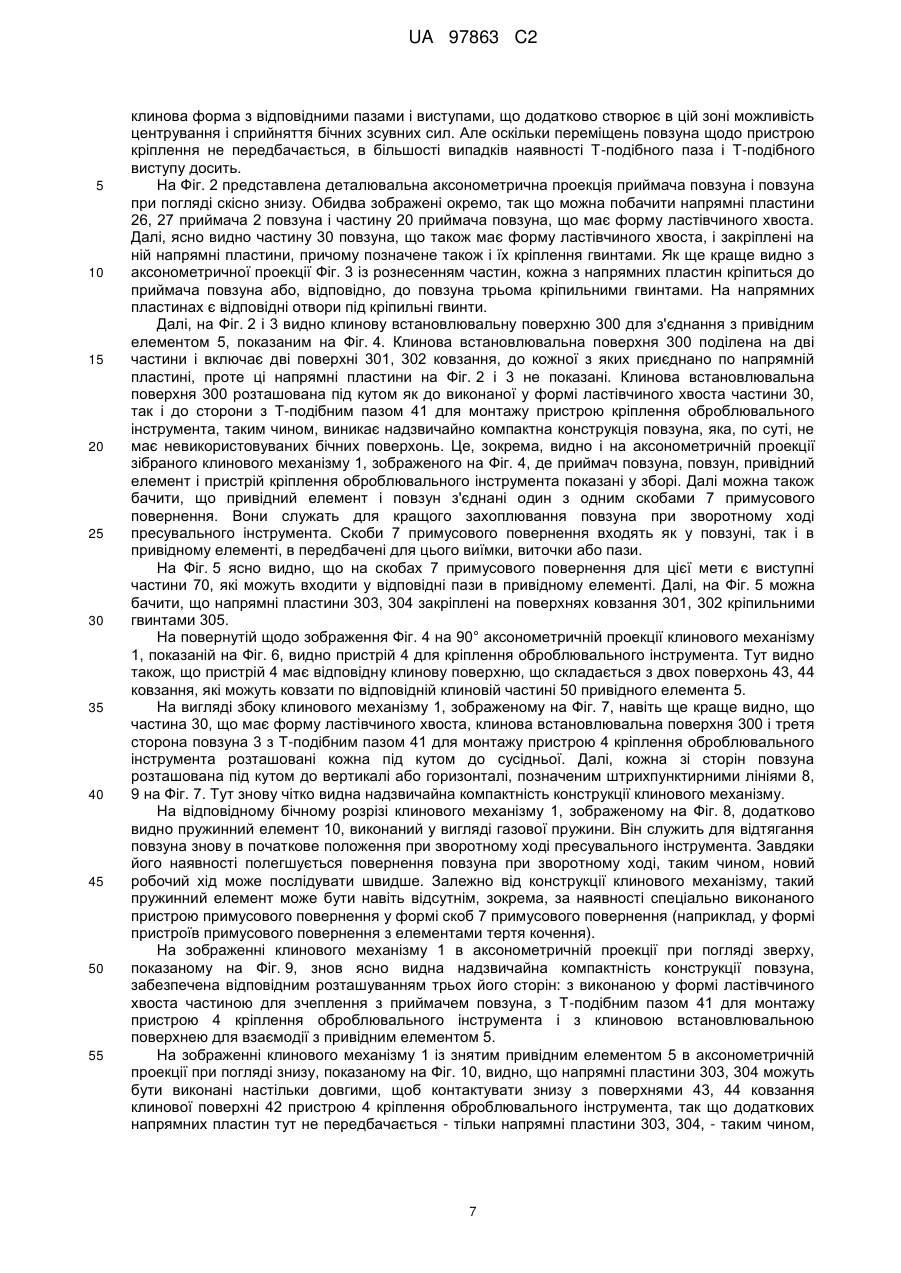
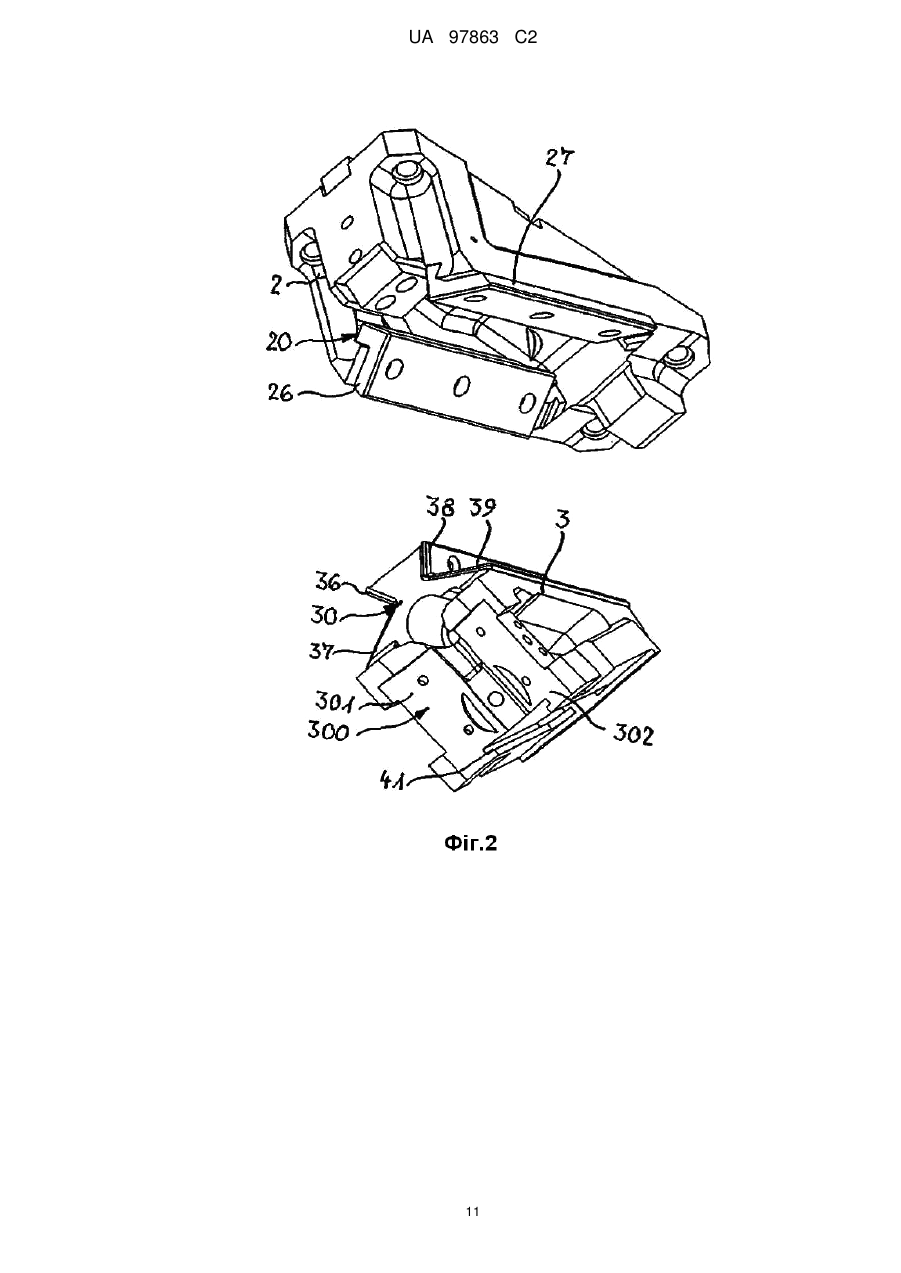
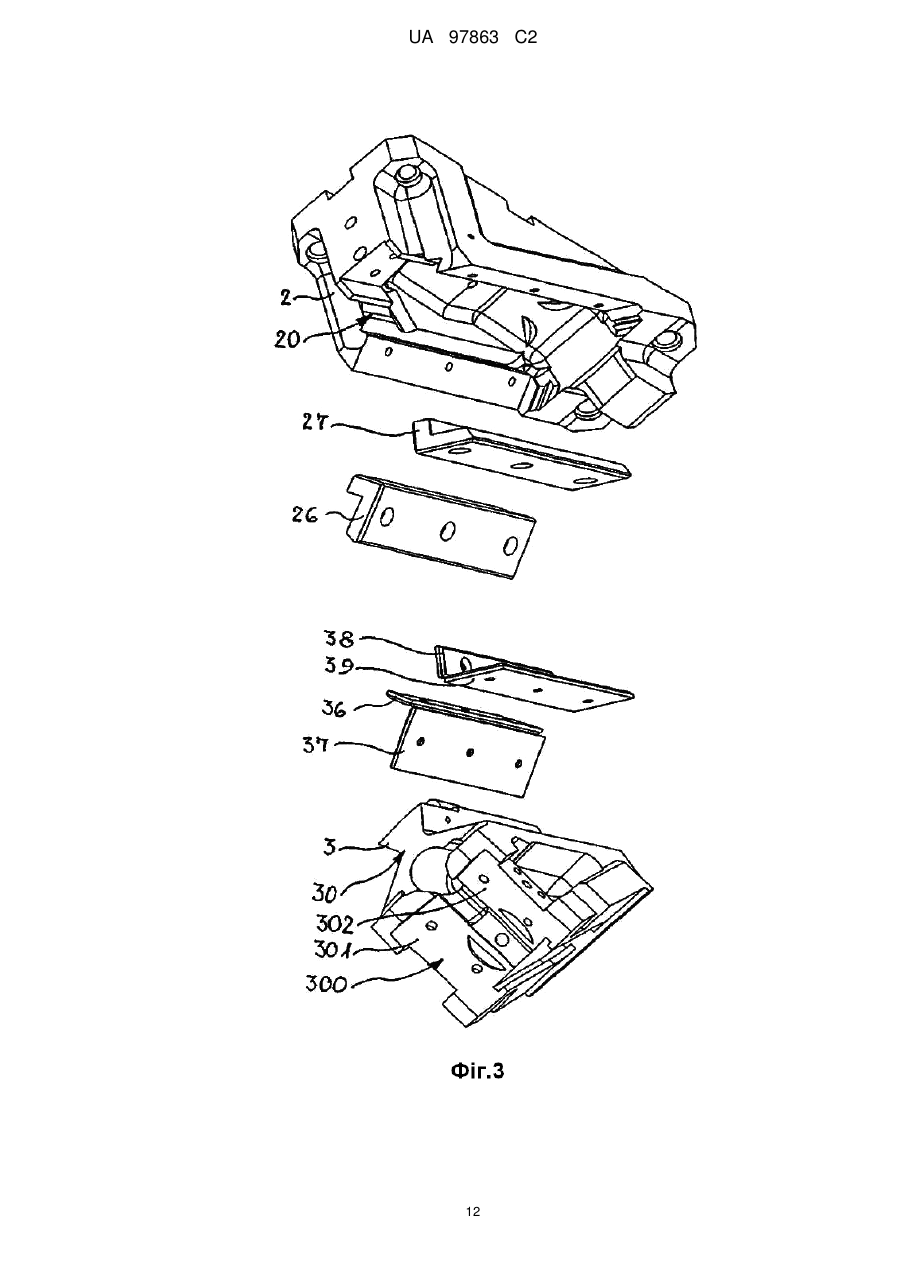
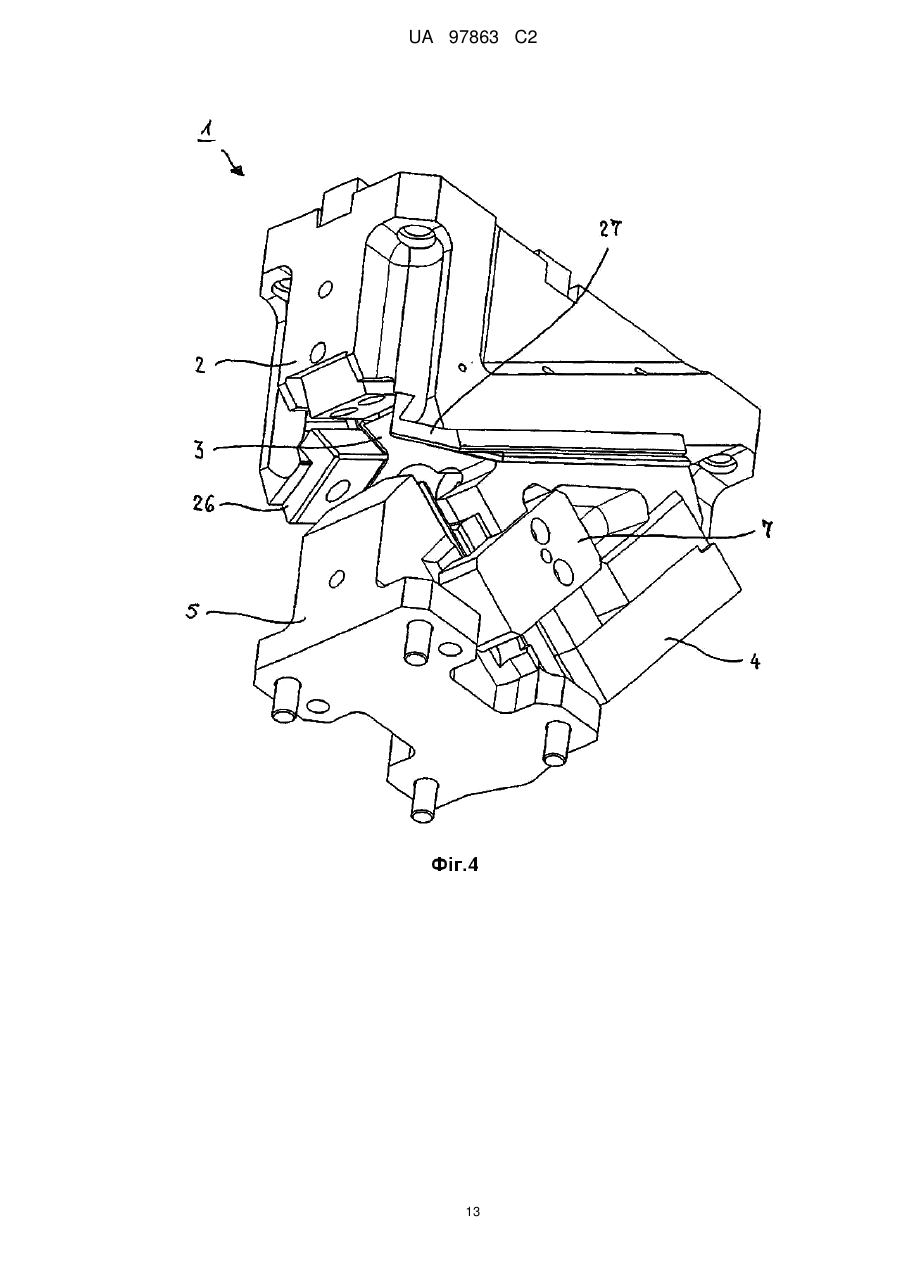
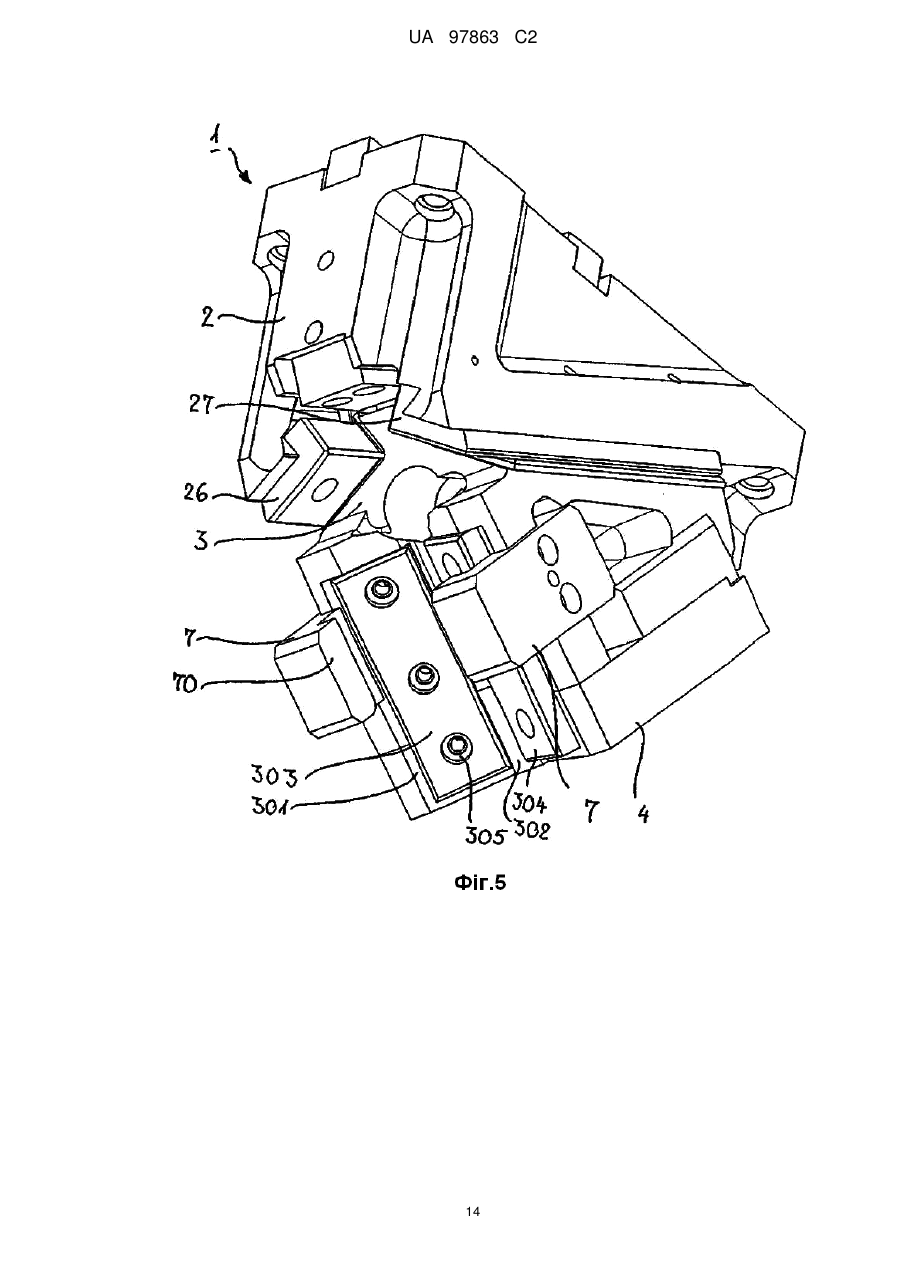
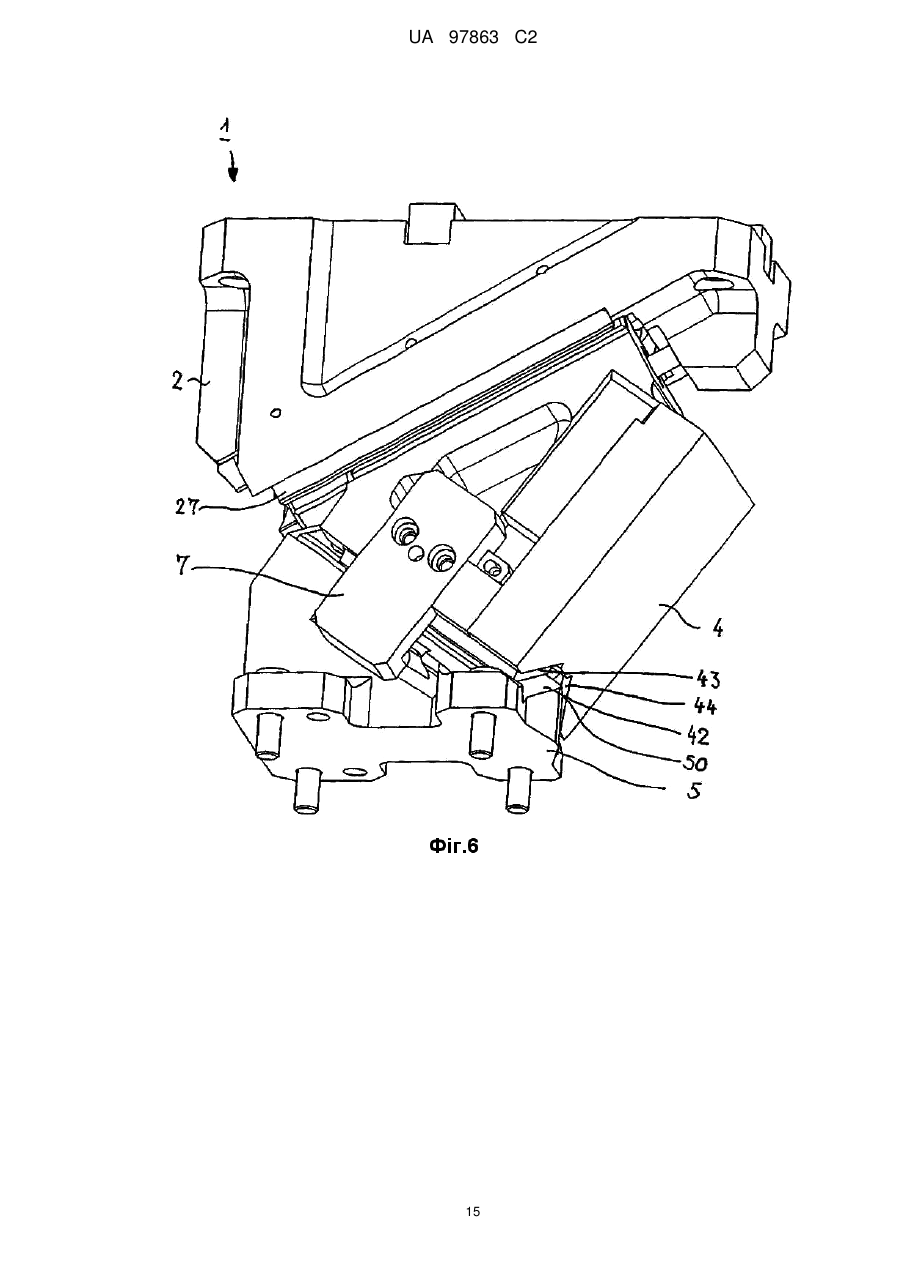
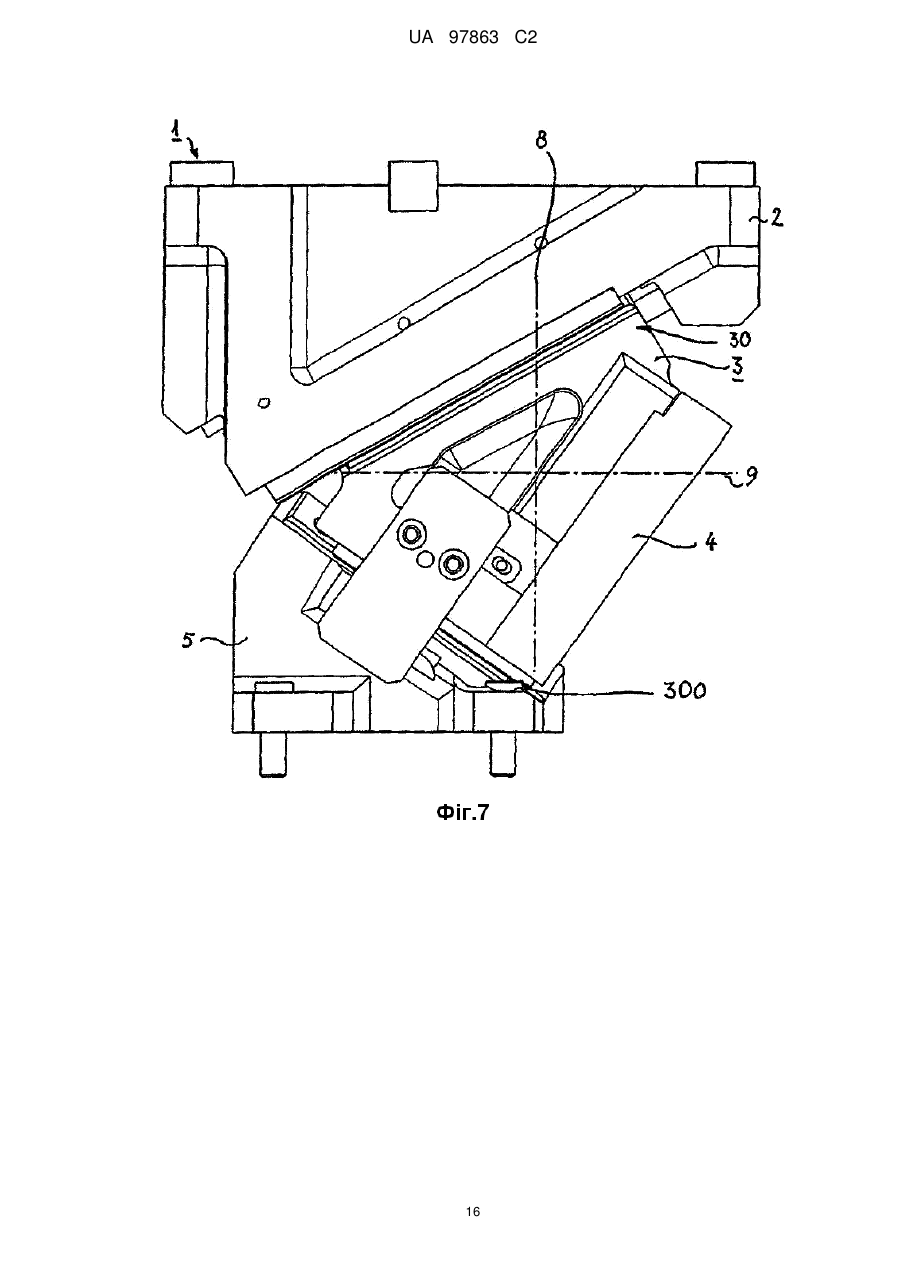
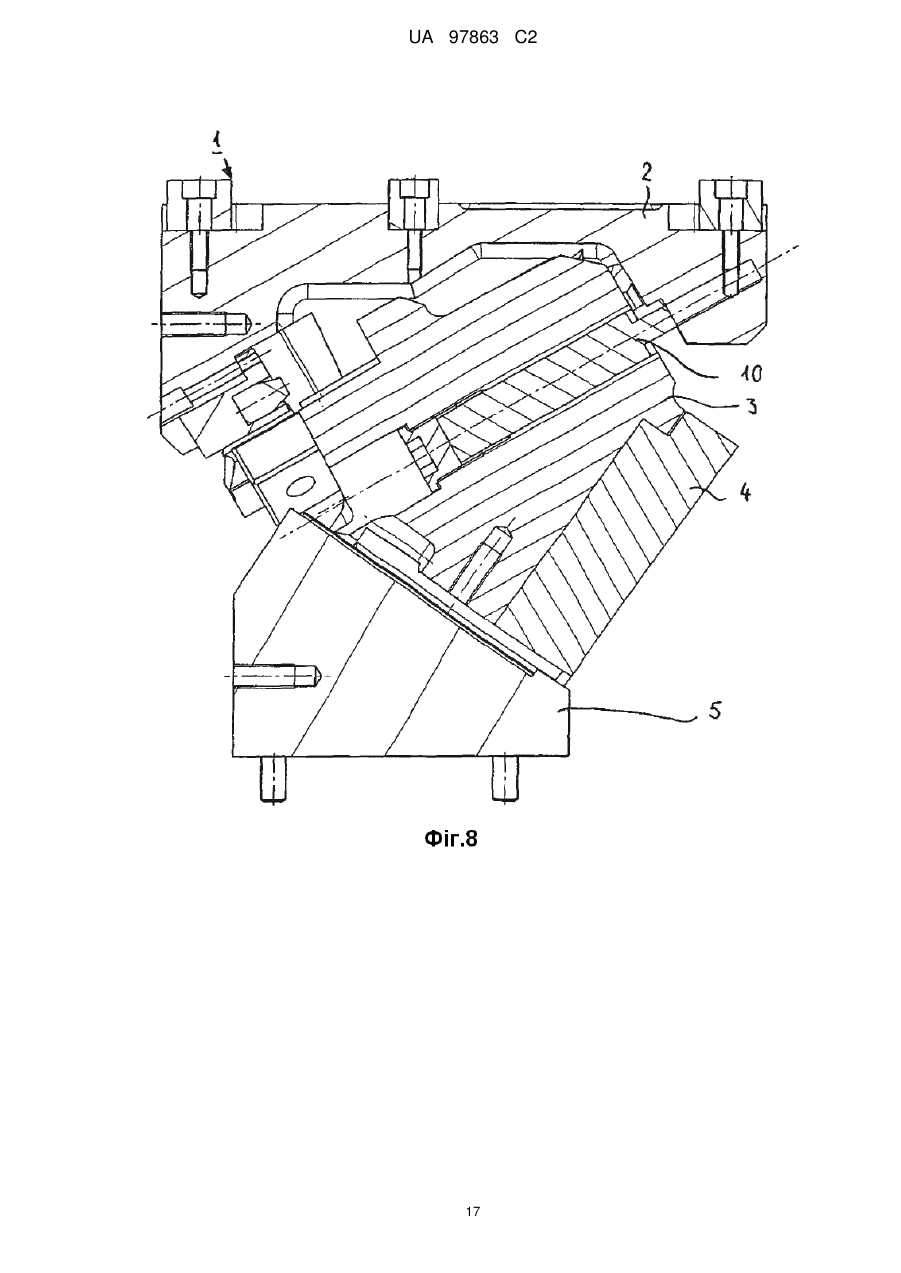
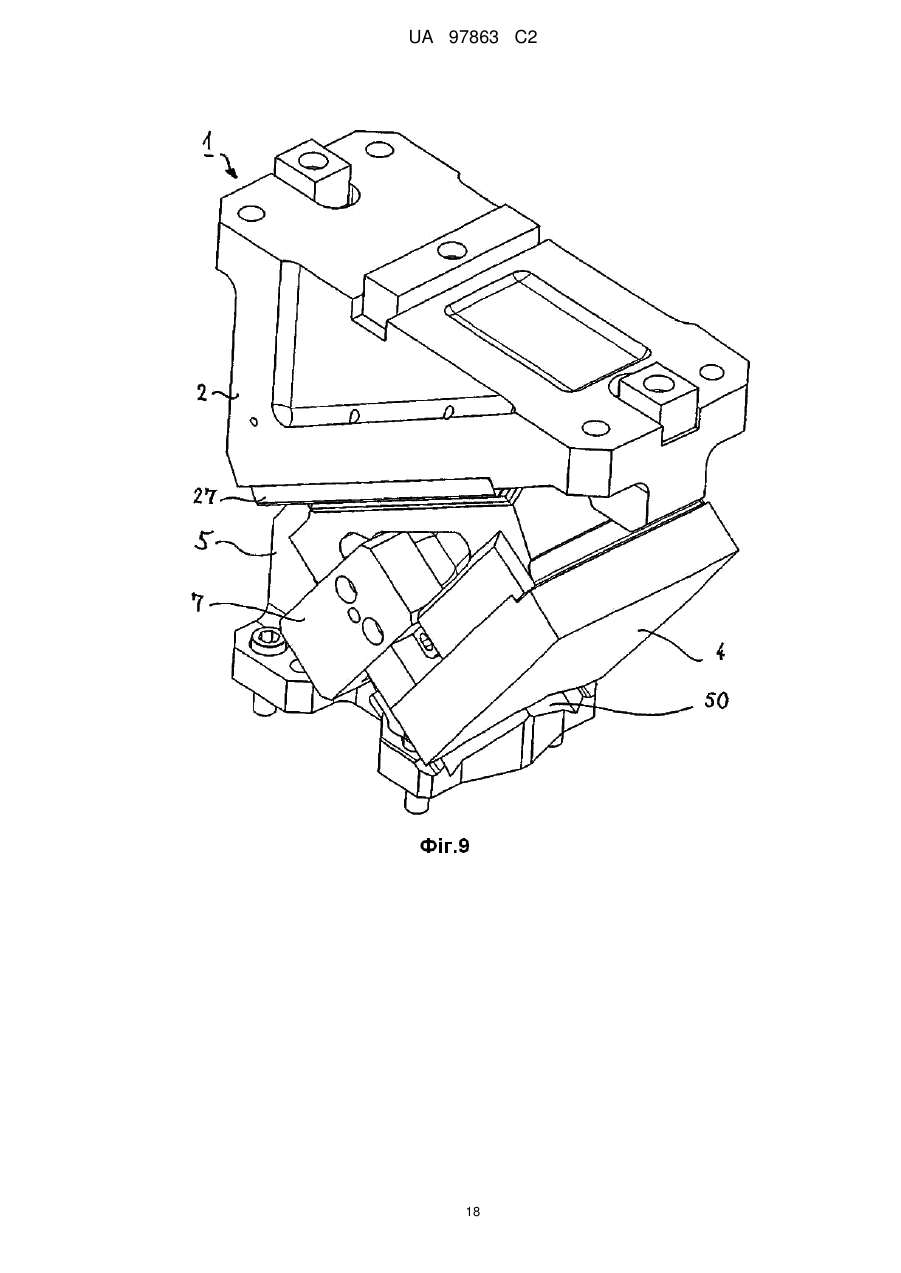
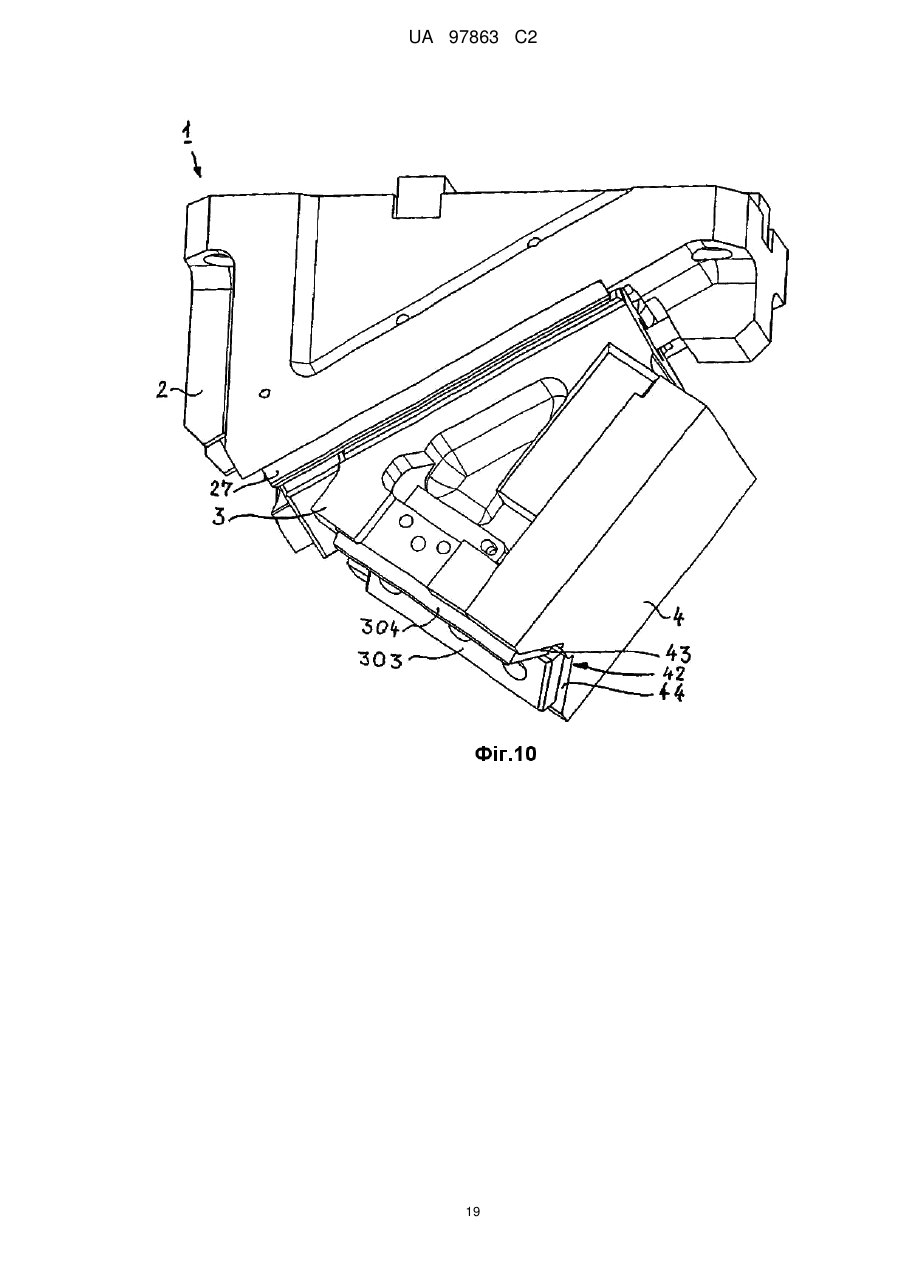
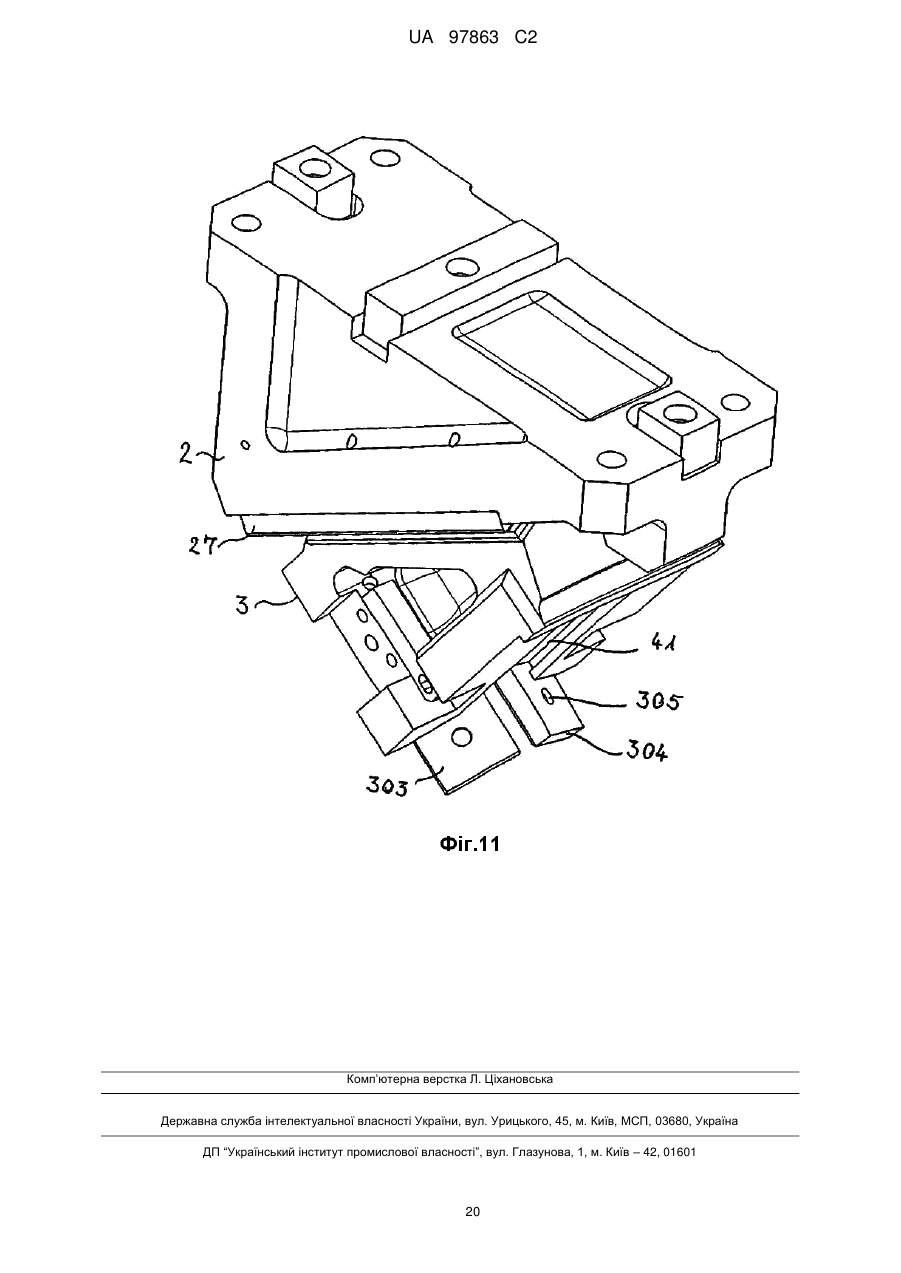
Реферат: У клиновому механізмі (1) з приймачем (2) повзуна, рухомим повзуном (3) і привідним елементом (5), що включає між повзуном (3) і привідним елементом (5) поверхні (301, 302) ковзання, між повзуном (3) і приймачем (2) повзуна передбачені напрямні (6) у формі ластівчина хвоста або призм. UA 97863 C2 (12) UA 97863 C2 UA 97863 C2 5 10 15 20 25 30 35 40 45 50 55 60 Даний винахід відноситься до клинового механізму або клина, що включає приймач повзуна, рухомий повзун і привідний елемент, причому між повзуном і привідним елементом передбачені поверхні ковзання, а між повзуном і приймачем повзуна розташована напрямна у формі ластівчиного хвоста або призми, з поверхнями ковзання на повзуні та поверхнями ковзання на приймачі повзуна. Винахід, далі, відноситься до повзуна для клинового механізму з приймачем повзуна і привідним елементом, причому повзун, розташований між приймачем повзуна і привідним елементом, має боковину у формі ластівчиного хвоста або призми з поверхнями ковзання. Клиновий механізм, званий також повзуном, служить, в основному, для зміни напряму дії сил пресування в штампах або інструментах обробки тиском, особливо для забезпечення можливості обрізання, пробивки або деформації похилих або фасонних ділянок деталей автомобільних кузовів. Клиновий механізм включає при цьому, щонайменше, один приймач повзуна, рухомий повзун і привідний елемент. Сам по собі жорсткий приймач повзуна зазвичай з'єднаний з частиною преса або пресувального інструмента, в якому повинні здійснюватися штампування або обробка тиском. Коли приймач повзуна клинового механізму закріплений у верхній, пов'язаній з рухомою траверсою преса, частині пресувального інструмента, клиновий механізм називається повзуном верхньої частини. Про повзун нижньої частини говорять, коли приймач повзуна клинового механізму пов'язаний із закріпленим на жорсткому пресувальному столі нижнім пресувальним інструментом. Незалежно від того, з якою частиною пов'язаний приймач повзуна клинового механізму, цей приймач зазвичай включає прямолінійні напрямні, в яких може зворотно-поступально рухатися рухомий повзун, який, проте, нерухомо з'єднаний з приймачем повзуна. Привідний елемент, будучи зазвичай жорстким, нерухомо з'єднаний з тією частиною пресувального інструмента, на якій не закріплений приймач повзуна. Привідний елемент зазвичай включає клинові скоси і, завдяки їх наявності, є елементом приводу відносно рухомого повзуна. При істотно вертикальному підведенні пресувального інструмента, званому робочим ходом, повзун, що знаходиться в своєму задньому положенні, упирається в жорстко закріплений привідний елемент і під дією останнього рухається вперед, підштовхуваний в робочому напрямі похилим розташуванням (клиновою формою) привідного елемента. При цьому нахил прямолінійних напрямних приймача повзуна узгоджений з похилим розташуванням привідного елемента так, що не виникає прискорення рухомого повзуна відносно швидкості власне преса. Таким чином, привід рухомого повзуна здійснюється тільки пресувальним інструментом, що створює керований тиск в напрямі вперед або назовні, який дозволяє здійснити штампування або обробку тиском. В процесі зворотного ходу, коли пресувальний інструмент пройшов нижню мертву точку і обидві його частини знову розходяться, рухомий повзун під дією відповідно виконаного пружного пружинного елемента зазвичай відводиться в своє початкове положення, після чого процес може бути початий знову. Повертальна сила, необхідна для відведення повзуна, складає зазвичай від 2 до 10 % власне робочого зусилля і ваги повзуна. При цьому визначальними для величини сили пресування є розміри поверхонь, що передають тиск, званих поверхнями ковзання, відповідні нахили прямолінійних напрямних у приймачі повзуна і похиле розташування привідного елемента, а також узгодження поверхонь і нахилів - і конструкція самого повзуна. Зазвичай значення тиску, який повинен бути переданий, знаходяться в діапазоні від декількох сотень до декількох десятків тисяч кілоньютонів. Рухомий повзун повинен по можливості без зазорів переміщатися в прямолінійних напрямних приймача, які при цьому повинні витримувати великі сили пресування і забезпечувати тривалий термін служби. Для того, щоб обрізання або пробивку деталі можна було виконувати без задирок, потрібний допуск на точність переміщення рухомого повзуна не більший ніж 0,02 мм. Якщо цей допуск не витримується, то обрізані, пробиті або іншим чином оброблені тиском деталі, вже не прилягатимуть точно одна до одної, що призведе до дефектів кузовних заготовок та/або, унаслідок тертя деталей одна об одну, до прискорення корозії, зниження міцності виготовлених кузовів і, можливо, виникнення підвищених шумів через розхитування кріплень листових елементів. Щоб уникнути всіх цих недоліків, зокрема, в автомобільній промисловості потрібно, щоб клиновий механізм забезпечував надзвичайно високу точність переміщення і протягом тривалого часу витримував або забезпечував тиск пресування, необхідний для роботи штампа або інструмента обробки тиском. Для забезпечення необхідної точності переміщення були розроблені різні принципи, деякі з них наводяться нижче. Так, наприклад, відомі напрямні повзуна з розташованими під прямим кутом привідними елементами і бічними напрямними пластинами, а також з кришкою, що пригвинчується, для утримування повзуна. Такі напрямні, як відомо, витримують дуже великий тиск пресування і бічні зсувні зусилля, але вони дуже складні і дорогі у виготовленні, оскільки 1 UA 97863 C2 5 10 15 20 25 30 35 40 45 50 55 потребують великого, трудомісткого і дорогого ручного припрацьовування для узгодження зазорів окремих елементів в напрямних. До того ж з'ясувалося, що є проблемою недостатній захист від розвалу напрямних повзуна, при якому вся вага повзуна з доданням сили зворотного відтягання діє на кріпильні гвинти кришки, що може дуже швидко призвести до їхнього перевантаження. Крім того, такі напрямні повзуна мають порівняно великі розміри і тому для конструкцій маленьких повзунів не підходять. Відомі також напрямні повзуна з бічними кутовими планками і розташованою під прямим кутом привідною пластиною. На відміну від вищеописаних напрямних повзуна, поєднання бічних напрямних пластин з кришкою веде до зменшення потрібного для конструкції об'єму, так що в цьому варіанті можуть бути створені, зокрема, і напрямні менших розмірів. Проте на кріпильні гвинти бічних планок діють великі сили, що призводить до порівняно високого ризику аварії. Крім того, і в цьому варіанті витрати на складне припрацювання взаємодіючих елементів для узгодження зазорів в напрямних великі, так що і в цьому випадку виникають додаткові витрати. Ще один застосовуваний тип напрямних повзуна включає нахилені одна до одної під кутом 45° бічні напрямні пластини і кришки. їх розташування нагадує при цьому дах. Завдяки такому розташуванню можна зменшити ширину конструкції, оскільки планки кришок і напрямні пластини розміщуються одна над одною, а не поряд. Проте, потрібний для цієї конструкції простір все ще дуже великий, що навряд чи допускає створення маленького повзуна. Крім того, розтягувальні сили що тут виникають, створюють несприятливу дію на кріпильні гвинти кришок, що призводить до високої ненадійності процесу. Ще одна відома конструкція включає напрямні повзуна з привідною пластиною і однією або двома напрямними колонками зі втулками, призначеними для утримання повзуна від бічних зсувів і випадіння. Хоча застосування напрямних колонок і привідної пластини потребує, як відомо, порівняно малих конструктивних об'ємів і дозволяє значно підвищити економічність виготовлення у порівнянні з вищеописаними варіантами, що відповідають рівню техніки, проте напрямні колонки з конструктивних причин неспроможні компенсувати великий бічний тиск. Крім того, вони неспроможні нести важкі повзуни, тому повзуни з колонками створюють менші сили пресування і в процесі пресування ненадійні. Ще один тип виконання напрямних повзуна відомий, наприклад, з документа ЕР 1035965 В1. У ньому передбачений обтиск напрямних повзуна, причому привідний елемент передбачає застосування призматичних напрямних, а між привідним елементом і повзуном вставляються напрямні пластини. Завдяки створеній дахоподібний формі можливе досягнення дуже великих сил повзуна при малих просторових розмірах конструкції, так само як і дуже високої точності зазорів напрямних, таким чином, клиновий механізм або напрямні повзуна стабільні і довговічні. Проте унаслідок витратної обробки різанням, потрібної для досягнення точної привідної форми, виготовлення обтискних напрямних надто витратне і, відповідно, дороге. Відомі й інші клинові механізми, наприклад, з документів ЕР 1259371 B1, DE 19860178 С1, а також ЕР 1197319 В1. У документі FR-A-2421030 розкритий клиновий механізм згаданого на початку даного опису типу; механізм використовується у пристрої затиску деталі. Цей пристрій включає опорну плиту (привідний елемент), траверсу (приймач повзуна) і клин (повзун), розташований між опорною плитою і траверсою, причому клин має похилу поверхню, повернуту до траверси, а контактна поверхня траверси нахилена під тим самим кутом; при цьому клин під дією гвинтового приводу переміщається уздовж опорної плити з метою зміни відстані між опорною плитою і траверсою. Клин має виступ у формі ластівчиного хвоста з поверхнями ковзання для переміщення у відповідній канавці опорної плити. Клиновий механізм згаданого на початку даного опису типу відомий також з документа DE 19861171 В4 як радіальний прес, що включає верхню опору преса (повзун) і поперечний штовхач (приймач повзуна), що має похилу поверхню, повернуту до відповідно нахиленої поверхні верхньої опори преса. Між поперечним штовхачем і верхньою опорою преса є напрямні у формі ластівчиного хвоста або Т-подібні, що включають поверхні ковзання. Всі вищеописані принципи виконання напрямних повзуна для клинового механізму включають одну або декілька напрямних пластин для передачі, найчастіше, високих сил пресування, а також відповідно виконані утримувальні елементи для утримування повзуна в передбачених для нього напрямних. Ці напрямні пластини служать для того, щоб постійно передавати створюваний пресувальним інструментом робочий тиск від приймача повзуна і привідного елемента на рухомий повзун і тим самим здійснювати власне привід вперед. Утримувальні елементи служать для лінійного утримування повзуна на напрямних пластинах приймача повзуна, при цьому вони повинні постійно забезпечувати необхідну точність 2 UA 97863 C2 5 10 15 20 25 30 35 40 45 50 55 60 переміщення і, за необхідності, компенсувати бічні зсувні зусилля, що можуть виникнути в процесі обробки тиском або в процесі різання або штампування. Таким чином, завдання даного винаходу полягає в тому, щоб запропонувати клиновий механізм згідно з обмежувальною частиною пункту 1 формули винаходу, удосконалений в тому відношенні, що пропонуються напрямні для рухомого повзуна, що дозволяють досягти ще вищої точності переміщення, ніж рішення, що відповідають рівню техніки, причому такі напрямні, які оптимально перенаправляють сили пресування, що діють у напрямі штампування або обробки тиском, ще краще, ніж напрямні, що відповідають рівню техніки, компенсують бічні зсувні зусилля і забезпечують більш тривалий термін служби клинового механізму, ніж той, якого можна було досягти досі в рішеннях, що відповідають рівню техніки. Крім того, повинне досягатися зниження трудомісткості і витрат, потрібних для припрацьовування клинового механізму, що дозволяє підвищити економічність процесу виробництва. Для клинового механізму згідно з обмежувальною частиною пункту 1 формули винаходу поставлене завдання вирішується за допомогою того, що передбачені на повзуні поверхні ковзання, через які передаються сили від приймача повзуна на повзун у процесі робочого ходу, при якому повзун переміщається назовні, знаходячись між привідним елементом і приймачем повзуна, розташовані одна до одної під кутом, більшим ніж 0° і меншим ніж 180°. Для повзуна згідно з обмежувальною частиною пункту 1 формули винаходу поставлене завдання вирішується за допомогою того, що передбачені на повзуні поверхні ковзання, через які передаються сили від приймача повзуна на повзун в процесі робочого ходу, при якому повзун переміщається назовні, знаходячись між привідним елементом і приймачем повзуна, розташовані під кутом одна до одної. Таким чином, пропонується клиновий механізм, в якому рухомий повзун містить боковину у формі ластівчиного хвоста або призми, при цьому приймач повзуна виконаний у вигляді відповідної відповідної частини так, що повзун своєю боковиною, виконаною у формі ластівчиного хвоста або призми, входить у зачеплення з приймачем повзуна і може утримуватися в ньому і переміщатися в його напрямних із самоцентруванням. Відповідні поверхні частин у формі ластівчиного хвоста або призми на повзуні та/або приймачі повзуна спираються одна на одну, причому унаслідок кутового взаєморозташування поверхонь частин у формі ластівчиного хвоста або призми може бути без проблем здійснене сприйняття сил, що діють в різних напрямах. Напрямні між приймачем повзуна і повзуном дозволяють здійснювати лінійне переміщення повзуна з самоцентруванням. Завдяки формі ластівчиного хвоста рухомий повзун, після вставлення у відповідним чином сформовану приймальну частину приймача повзуна, без вживання додаткових заходів гарантується від випадіння або бічного зсуву. Оскільки переміщення повзуна уздовж приймача повзуна може бути високоточним і нечутливим до бічних зсувних зусиль завдяки напрямній у формі ластівчиного хвоста, яка може бути економічно виготовлена без використання додаткових конструктивних елементів у вигляді прямолінійної напрямної, виникає компактний клиновий механізм з дуже високою точністю переміщення, який до того ж нечутливий до виробничих допусків. Оскільки обтискних напрямних або додаткових конструктивних елементів вже більше не потребується, можна не тільки зменшити вартість порівняно з рішеннями, що відповідають рівню техніки, але і підвищити стійкість процесу і зменшити ризик можливої аварії. Монтаж клинового механізму, для якого потрібно лише всунути повзун в приймач повзуна, спрощується порівняно з рішеннями, що відповідають рівню техніки. А оскільки напрямні (призматичні або у формі ластівчиного хвоста) повзуна, приймача повзуна і привідного елемента нечутливі до виробничих допусків, можна обійтися без дорогого притирання елементів напрямних. Далі, забезпечуване призматичними напрямними самоцентрування дає дуже високу точність переміщення при сприйнятті бічних зсувних сил. Завдяки своїй компактній конструкції клиновий механізм може бути застосований в умовах обмеженого наявного простору усередині пресувального інструмента, проте, зрозуміло, він придатний і для застосувань більшого формату. Краще передбачити на повзуні та/або приймачі повзуна поверхні ковзання. Найкраще, щоб напрямна у формі ластівчиного хвоста або призми включала, щонайменше, дві розташовані під кутом одна до одної напрямні пластини. Напрямні пластини напрямної у формі ластівчиного хвоста або призми можуть, і це краще, мати L-подібний перетин. Подальші переваги, як з'ясувалося, можна отримати, якщо передбачити напрямні пластини на всіх поверхнях повзуна і приймача повзуна, що ковзають одна щодо одної, так, що і для повзуна і для приймача повзуна передбачається, щонайменше, по дві розташовані під кутом одна до одної напрямні пластини. Може забезпечити перевагу розташування напрямних пластин з L-подібним або дахоподібним перетином таким чином, що їхні внутрішні вузькі сторони, завдяки скісному, нахиленому назовні 3 UA 97863 C2 5 10 15 20 25 30 35 40 45 50 55 60 положенню напрямних пластин, утворюють пазову конфігурацію, аналогічну вже згадуваним напрямним у формі ластівчиного хвоста. Передбачивши одночасно з двох боків повзуна і, відповідно, приймача повзуна, напрямні пластини, причому розташовані симетрично і L-подібно або дахоподібно, так що при цьому можуть бути отримані напрямні у формі ластівчиного хвоста, можливо, і це найкраще, відмовитися від додаткових дорогих лінійних утримувальних елементів. Крім того, можна помітно зменшити вартість виготовлення порівняно з рішеннями, що відповідають рівню техніки, оскільки передбачається менше число елементів, ніж у рішеннях, що відповідають рівню техніки, при цьому функціональні характеристики клинового механізму жодною мірою не страждають, навпаки, створюється можливість більш надійної і безпечної роботи з дуже високою точністю переміщення, не дивлячись на те, що застосування утримувальних елементів не передбачається. Напрямна у формі ластівчиного хвоста або призми переважно включає з'єднання з геометричним замиканням повзуна і приймача повзуна. Завдяки здійсненню такого з'єднання з геометричним замиканням, створюється компактний вузол, здатний без проблем передавати навіть високі зусилля пресування. Далі, така конструкція запобігає спонтанному висковзуванню повзуна з приймача повзуна, оскільки, завдяки геометричному замиканню в зоні напрямної у формі ластівчиного хвоста або призми і механічному контакту обох деталей повзуна, що вставляються одна в одну, і приймача повзуна, дійсно здійснюється передавання сил, які повинні бути передані через контактуючі поверхні, розташовані під кутом одна до одної, при цьому їх кутове розташування підтримує зчеплення деталей. Подальші переваги, як з'ясувалося, можна отримати, якщо приймач повзуна в зоні поверхонь ковзання та/або приймальної частини напрямних пластин виконаний з виступом. Завдяки цьому створюється збільшена поверхня для ковзання повзуна відносно приймача повзуна, що дозволяє забезпечити дуже хороше передавання сил пресування через цю збільшену приймальну поверхню. Напрямні пластини можуть, і це краще, бути знімними і кріпитися на приймачі повзуна та/або повзуні, зокрема, за допомогою кріпильних гвинтів. Знімне кріплення напрямних пластин на приймачі повзуна і, відповідно, повзуні забезпечує можливістьзаміни пластин при їх зносі. Зрозуміло, в принципі, так само можливо створити на приймачі повзуна і повзуні відповідні поверхні ковзання, які ковзатимуть одна по одній без вставляння проміжних напрямних пластин. Проте в цьому випадку при зносі повинні замінюватися самі приймач повзуна і повзун, так що економічнішим, простішим і зручнішим у роботі виявився варіант, що передбачає знімні напрямні пластини, оскільки в цьому варіанті їх заміна може бути проведена швидко і дійсно без проблем. Боковина повзуна у формі ластівчиного хвоста або призми краще містить як поверхні ковзання поверхні прилягання, зокрема, поверхні для пристикування напрямних пластин. При цьому виявилось, що найкраще передбачити по дві розташовані під кутом одна до одної напрямні пластини, оскільки при цьому можна уникнути стомливого регулювання чотирьох окремих напрямних пластин, розташованих під кутом одна до одної. В даному випадку доводиться здійснювати для кожної з напрямних пластин лише одне регулювання однієї з поверхонь прилягання, що дозволяє швидко здійснювати заміну напрямних пластин. Краще передбачити між повзуном і привідним елементом клинову напрямну. Така конструкція при порівняно малих розмірах здатна сприймати дуже великі сили, причому в той же час можливий точний і стабільний напрям повзуна на привідному елементі при його переміщенні. Клинова напрямна краще містить дві розташовані під кутом одна до одної напрямні пластини. Ці напрямні пластини краще виготовляються з матеріалу, що сприяє ковзанню, зокрема, з бронзи з твердим мастилом. Передбачивши напрямні пластини, зокрема змінні, які кріпляться на привідному елементі та/або повзуні, можна забезпечити просту заміну пластин при їх зносі і оптимальне ковзання поверхонь привідного елемента і повзуна, що контактують одна з одною, в процесі роботи. Далі, виявилося краще розташувати на повзуні напрямну у формі ластівчиного хвоста або призми і клинову напрямну під кутом одна до одної. Завдяки такому багаторазовому кутовому взаєморозташуванню напрямних можна зменшити, зокрема, розміри конструкції клинового механізму, так що виникає компактний вузол, який може бути застосований навіть в умовах обмеженого простору усередині пресувального інструмента. Далі, виявилося краще розташувати напрямну у формі ластівчиного хвоста або призми і клинову напрямну на двох суміжних сторонах повзуна. Завдяки такому розташуванню можна не тільки збільшити точність переміщення, але і, перш за все, одночасно зменшити розміри 4 UA 97863 C2 5 10 15 20 25 30 35 40 45 50 55 конструкції, порівняно з рішеннями, що відповідають рівню техніки, в яких зазвичай передбачається здійснення контакту з привідним елементом і контакту з приймачем повзуна на протилежних сторонах повзуна. Пристрій для монтажу кріплення оброблювального інструмента може розташовуватися на третій, суміжній з двома іншими стороні повзуна. При цьому краще, щоб на цій третій стороні були, щонайменше, два піднутрення та/або два пази для вставляння виступних елементів пристрою для монтажу кріплення оброблювального інструмента. Наявність такого окремого пристрою для монтажу кріплення оброблювального інструмента, наприклад пуансона, дозволяє просто і без проблем замінювати оброблювальний інструмент, оскільки для цього достатньо лише зняти пристрій кріплення з цієї третьої сторони повзуна і замінити його іншим пристроєм кріплення, наприклад, таким що несе якийсь інший оброблювальний інструмент. Стомливе пригвинчування і відгвинчування власне оброблювального інструмента, іноді пов'язане зі свердленням додаткових отворів в повзуні, повністю відпадає. Наявність піднутрень та/або пазів на цій третій стороні повзуна дозволяє монтувати пристрій кріплення, наприклад, за допомогою всування, при цьому навіть не потрібно ніяких додаткових кріплень, оскільки, зокрема, піднутрення, завдяки створюваному ними з'єднанню з геометричним замиканням, вже забезпечують оптимальне передавання сил. Далі, на цій третій стороні повзуна може бути передбачена ще, щонайменше, одна клинова поверхня (в цьому випадку і пристрій кріплення оброблювального інструмента краще включає відповідну клинову поверхню), щоб забезпечити з'єднання з геометричним замиканням між повзуном і пристроєм кріплення оброблювального інструмента. Завдяки цьому можуть бути погашені сили бічних зсувів і оптимізоване передавання сил. Під час робочого ходу повзун переміщається назовні, знаходячись між розташованими у формі клина поверхнями ковзання привідного елемента і приймача повзуна, причому приймач повзуна і привідний елемент, що приводяться ходом преса, рухаються перпендикулярно один до одного. При цьому створюване пресувальним інструментом зусилля пресування відповідає зусиллю протитиску, яке клиновий механізм розвиває для вироблюваної ним роботи, наприклад, обрізання, пробиття або копіювальної обробки деталі автомобільного кузова, причому це зусилля розподіляється по поверхнях ковзання залежно від конкретного кутового взаєморозташування окремих поверхонь ковзання. Завдяки кутовому взаєморозташуванню поверхонь ковзання, розташованих по відношенню одна до одної у формі даху або призми, відбувається самоцентрування рухомого повзуна між приймачем повзуна і привідним елементом або на їхніх поверхнях ковзання. Завдяки цьому можуть бути досягнуті дуже висока точність переміщення і бічна стійкість повзуна, при цьому виробничі допуски або інші пов'язані з виготовленням неточності можуть бути скомпенсовані і в результаті вже не чинитимуть негативного впливу. При відведенні повзуна - так званому зворотному ході, при якому пресувальний інструмент розсувається і, відповідно, приймач повзуна віддаляється від привідного елемента, повзун відтягається у зону між приймачем повзуна і привідним елементом. Сили, що діють на повзун у процесі зворотного ходу, або відведення, обмежені тільки вагою повзуна і силами відведення, що діють на приймач повзуна, повзун і привідний елемент при розсуванні пресувального інструмента. Розміри поверхонь ковзання повзуна і напрямних повзуна, що рухаються при цьому одна відносно одної, можуть бути зменшені у порівнянні з розмірами поверхонь ковзання, що рухаються одна відносно одної при робочому ході, так що згадувана вище L-подібна форма поверхонь ковзання напрямних у формі ластівчиного хвоста виявляється тут дуже придатною. При підвішеному повзуні верхньої частини або верхньому клиновому механізмі вага повзуна діє на прилеглі з геометричним замиканням до його поверхонь ковзання напрямні у формі ластівчиного хвоста поверхні приймача повзуна і справляє на них розсувну дію, спрямовану донизу. Проте, завдяки обпиранню з геометричним замиканням повзуна і приймача повзуна, ці бічні зсувні сили компенсуються, що дозволяє здійснити постійне і стійке закріплення повзуна в приймачі повзуна і напрямних пластин на повзуні і приймачі повзуна. Таким чином, на кріпильні гвинти напрямних пластин небажані силові дії, особливо розтягальні сили, не діють. Завдяки наявності між повзуном і приймачем повзуна напрямних у формі ластівчиного хвоста або призм з'являється можливість оснащувати малі, середні і великоформатні клинові механізми, що відкриває широку область застосувань. Для більш детального пояснення даного винаходу нижче будуть детальніше описані приклади його здійснення з посиланнями на креслення, на яких представлені: На Фіг. 1: вертикальний розріз клинового механізму з напрямними у формі ластівчиного хвоста, згідно з першим варіантом здійснення даного винаходу; 5 UA 97863 C2 5 10 15 20 25 30 35 40 45 50 55 60 На Фіг. 2: аксонометрична проекція приймача повзуна і повзуна клинового механізму, зображеного на Фіг. 1; На Фіг. 3: аксонометрична проекція з рознесенням частин приймача повзуна і повзуна, зображених на Фіг. 2; На Фіг. 4: аксонометрична проекція клинового механізму з напрямними у формі ластівчиного хвоста між повзуном і приймачем повзуна, згідно з другим варіантом здійснення даного винаходу; На Фіг. 5: аксонометрична проекція клинового механізму, зображеного на Фіг. 4, без привідного елемента; На Фіг. 6: аксонометрична проекція клинового механізму, зображеного на Фіг. 4, при погляді збоку; На Фіг. 7: вигляд збоку клинового механізму, зображеного на Фіг. 4; На Фіг. 8: вигляд збоку в розрізі клинового механізму, зображеного на Фіг. 4; На Фіг. 9: аксонометрична проекція клинового механізму, зображеного на Фіг. 4, при погляді скісно зверху, зі встановленим пристроєм кріплення оброблювального інструмента; На Фіг. 10: аксонометрична проекція оснащеного пристроєм кріплення оброблювального інструмента клинового механізму, зображеного на Фіг. 9, зі знятим привідним елементом; і На Фіг. 11: аксонометрична проекція клинового механізму, зображеного на Фіг. 10, зі знятим пристроєм кріплення оброблювального інструмента і знятим привідним елементом. На Фіг. 1 представлений розріз клинового механізму 1 або клина з приймачем 2 повзуна, повзуном 3 і пристроєм 4 кріплення оброблювального інструмента. З'єднаний з повзуном 3 привідний елемент на зображенні Фіг. 1 не видний, але його можна побачити на аксонометричній проекції Фіг. 4. Повзун і приймач повзуна з'єднані один з одним напрямною 6 у формі ластівчиного хвоста або призми. При цьому повзун 3 має частину 30 у формі ластівчиного хвоста. Ця частина включає з двох сторін по дві розташовані одна до одної під кутом поверхні 31, 32, 33, 34 ковзання. При цьому вони виконані так, що обидві поверхні 31 і 33 менші, ніж обидві поверхні 32 і 34. Це пояснюється тим, що при робочому ході зусилля пресування, створювані пресувальним інструментом, в якому розміщений клиновий механізм, передаються від приймача повзуна на повзун через поверхні 32, 34 ковзання. При відведенні або зворотному ході пресувального інструмента відбувається відтягання повзуна по обох поверхнях 31, 33 ковзання, при цьому на повзун діє набагато менша сила, так що цих поверхонь ковзання зменшених розмірів досить. Приймач 2 повзуна має відповідним чином виконану відповідну частину 20, що включає поверхні 21-24 ковзання, які з геометричним замиканням прилягають до відповідних поверхонь 31-34 ковзання. Далі, виконана у формі ластівчиного хвоста частина 30 з геометричним замиканням входить виступною частиною 35 у відповідну виїмку 25 в приймачі 2 повзуна. Виступна частина 35 може мати протяжність, рівну лише частині довжини повзуна або приймача повзуна. У принципі, можна і не передбачати цієї виступної частини, проте за наявності такої виступної частини 35, що з геометричним замиканням входить у відповідну виїмку 25 у приймачі повзуна, зчеплення повзуна і приймача повзуна помітно поліпшується. Як далі видно з Фіг. 1, на приймачі повзуна і повзуні передбачені напрямні пластини для утворення поверхонь ковзання, відповідно, 21-24 і 31-34. Напрямні пластини 26, 27 на приймачі 2 повзуна мають L-подібний перетин, тоді як на відповідних поверхнях повзуна змонтовані окремі плоскі напрямні пластини 36, 37, 38, 39, що краще видно на Фіг. 3. L-подібні напрямні пластини 26, 27 закріплені на приймачі повзуна кріпильними гвинтами 28, 29. І напрямні пластини 36-39 на повзуні також закріплені відповідними кріпильними гвинтами, які, проте, на Фіг. 1 не показані. Наявність такого роду знімного кріплення напрямних пластин на приймачі повзуна і, відповідно, повзуні забезпечує можливість без проблем замінювати пластини при їх зносі. Кріпильні гвинти ставляться на напрямні пластини впотай і, таким чином, відносному переміщенню поверхонь ковзання наявність кріпильних гвинтів не заважає. Як ясно видно, зокрема, на розрізі Фіг. 1, в зоні напрямної у формі ластівчиного хвоста приймач повзуна виступає назовні, щоб створити достатньо великі поверхні 22, 24 ковзання для обпирання і ковзання повзуна 3. Як далі видно з Фіг. 1, на пристрої 4 для кріплення оброблювального інструмента передбачений Т-подібний виступ 40, а на повзуні 3 - відповідний Т-подібний паз 41. Завдяки цьому пристрій кріплення оброблювального інструмента може бути просто вставлений в Тподібний паз 41, що дозволяє здійснювати просте кріплення і надійне утримання пристрою на повзуні. Замість Т-подібного паза і Т-подібного виступу в цій зоні може бути передбачена і 6 UA 97863 C2 5 10 15 20 25 30 35 40 45 50 55 клинова форма з відповідними пазами і виступами, що додатково створює в цій зоні можливість центрування і сприйняття бічних зсувних сил. Але оскільки переміщень повзуна щодо пристрою кріплення не передбачається, в більшості випадків наявності Т-подібного паза і Т-подібного виступу досить. На Фіг. 2 представлена деталювальна аксонометрична проекція приймача повзуна і повзуна при погляді скісно знизу. Обидва зображені окремо, так що можна побачити напрямні пластини 26, 27 приймача 2 повзуна і частину 20 приймача повзуна, що має форму ластівчиного хвоста. Далі, ясно видно частину 30 повзуна, що також має форму ластівчиного хвоста, і закріплені на ній напрямні пластини, причому позначене також і їх кріплення гвинтами. Як ще краще видно з аксонометричної проекції Фіг. 3 із рознесенням частин, кожна з напрямних пластин кріпиться до приймача повзуна або, відповідно, до повзуна трьома кріпильними гвинтами. На напрямних пластинах є відповідні отвори під кріпильні гвинти. Далі, на Фіг. 2 і 3 видно клинову встановлювальну поверхню 300 для з'єднання з привідним елементом 5, показаним на Фіг. 4. Клинова встановлювальна поверхня 300 поділена на дві частини і включає дві поверхні 301, 302 ковзання, до кожної з яких приєднано по напрямній пластині, проте ці напрямні пластини на Фіг. 2 і 3 не показані. Клинова встановлювальна поверхня 300 розташована під кутом як до виконаної у формі ластівчиного хвоста частини 30, так і до сторони з Т-подібним пазом 41 для монтажу пристрою кріплення оброблювального інструмента, таким чином, виникає надзвичайно компактна конструкція повзуна, яка, по суті, не має невикористовуваних бічних поверхонь. Це, зокрема, видно і на аксонометричній проекції зібраного клинового механізму 1, зображеного на Фіг. 4, де приймач повзуна, повзун, привідний елемент і пристрій кріплення оброблювального інструмента показані у зборі. Далі можна також бачити, що привідний елемент і повзун з'єднані один з одним скобами 7 примусового повернення. Вони служать для кращого захоплювання повзуна при зворотному ході пресувального інструмента. Скоби 7 примусового повернення входять як у повзуні, так і в привідному елементі, в передбачені для цього виїмки, виточки або пази. На Фіг. 5 ясно видно, що на скобах 7 примусового повернення для цієї мети є виступні частини 70, які можуть входити у відповідні пази в привідному елементі. Далі, на Фіг. 5 можна бачити, що напрямні пластини 303, 304 закріплені на поверхнях ковзання 301, 302 кріпильними гвинтами 305. На повернутій щодо зображення Фіг. 4 на 90° аксонометричній проекції клинового механізму 1, показаній на Фіг. 6, видно пристрій 4 для кріплення оброблювального інструмента. Тут видно також, що пристрій 4 має відповідну клинову поверхню, що складається з двох поверхонь 43, 44 ковзання, які можуть ковзати по відповідній клиновій частині 50 привідного елемента 5. На вигляді збоку клинового механізму 1, зображеному на Фіг. 7, навіть ще краще видно, що частина 30, що має форму ластівчиного хвоста, клинова встановлювальна поверхня 300 і третя сторона повзуна 3 з Т-подібним пазом 41 для монтажу пристрою 4 кріплення оброблювального інструмента розташовані кожна під кутом до сусідньої. Далі, кожна зі сторін повзуна розташована під кутом до вертикалі або горизонталі, позначеним штрихпунктирними лініями 8, 9 на Фіг. 7. Тут знову чітко видна надзвичайна компактність конструкції клинового механізму. На відповідному бічному розрізі клинового механізму 1, зображеному на Фіг. 8, додатково видно пружинний елемент 10, виконаний у вигляді газової пружини. Він служить для відтягання повзуна знову в початкове положення при зворотному ході пресувального інструмента. Завдяки його наявності полегшується повернення повзуна при зворотному ході, таким чином, новий робочий хід може послідувати швидше. Залежно від конструкції клинового механізму, такий пружинний елемент може бути навіть відсутнім, зокрема, за наявності спеціально виконаного пристрою примусового повернення у формі скоб 7 примусового повернення (наприклад, у формі пристроїв примусового повернення з елементами тертя кочення). На зображенні клинового механізму 1 в аксонометричній проекції при погляді зверху, показаному на Фіг. 9, знов ясно видна надзвичайна компактність конструкції повзуна, забезпечена відповідним розташуванням трьох його сторін: з виконаною у формі ластівчиного хвоста частиною для зчеплення з приймачем повзуна, з Т-подібним пазом 41 для монтажу пристрою 4 кріплення оброблювального інструмента і з клиновою встановлювальною поверхнею для взаємодії з привідним елементом 5. На зображенні клинового механізму 1 із знятим привідним елементом 5 в аксонометричній проекції при погляді знизу, показаному на Фіг. 10, видно, що напрямні пластини 303, 304 можуть бути виконані настільки довгими, щоб контактувати знизу з поверхнями 43, 44 ковзання клинової поверхні 42 пристрою 4 кріплення оброблювального інструмента, так що додаткових напрямних пластин тут не передбачається - тільки напрямні пластини 303, 304, - таким чином, 7 UA 97863 C2 5 10 15 20 25 30 35 40 45 50 55 передбачається єдина поверхня для взаємодії з відповідною клиновою частиною 50 привідного елемента 5. На зображенні клинового механізму 1 в аксонометричній проекції при погляді зверху, показаному на Фіг. 11, при знятому пристрої кріплення оброблювального інструмента знову видно напрямні пластини 303, 304. Далі, тут видно, що на пристрої кріплення оброблювального інструмента передбачене відповідне кріплення, забезпечуване наявністю в напрямних пластинах 303, 304 отвору 305 з відповідним кріпильним гвинтом, який, правда, на Фіг. 11 не показаний. Така конструкція дозволяє ще більше удосконалити фіксацію пристрою 4 кріплення оброблювального інструмента на повзуні і створити ще більш стабільний вузол. Вищезазначені напрямні пластини на повзуні і привідному елементі, а також на приймачі повзуна виготовляються краще з бронзи з твердим мастилом для забезпечення особливо легкого відносного переміщення відповідних елементів пар ковзання. Само собою зрозуміло, що напрямні пластини можуть бути виготовлені і з інших матеріалів, при цьому мале тертя поверхонь, що ковзають одна щодо одної, може забезпечити оптимальне переміщення повзуна усередині клинового механізму при робочому і зворотному ходах пресувального інструмента, в якому розміщений клиновий механізм. Окрім вищеописаних і зображених на кресленнях варіантів здійснення клинового механізму з напрямною у формі ластівчиного хвоста або призми можуть бути створені численні подальші варіанти здійснення, що передбачають наявність, відповідно, поверхонь ковзання у формі ластівчиного хвоста між приймачем повзуна і повзуном або призматичних напрямних між повзуном і привідним елементом і приймачем повзуна і повзуном. У кожному з цих варіантів точність переміщення повзуна між приймачем повзуна і привідним елементом помітно збільшується в порівнянні з рівнем техніки, бічні зсувні сили гасяться, а виробничі допуски виготовлення приймача повзуна, повзуна і напрямних компенсуються. Завдяки тому, що між приймачем повзуна і повзуном передбачаються тільки напрямні у формі ластівчиного хвоста або призм, можна обійтися без додаткових напрямних конструктивних елементів і, таким чином, створити клиновий механізм, помітно економічніший у виготовленні в порівнянні з рівнем техніки. ФОРМУЛА ВИНАХОДУ 1. Клиновий механізм (1), що включає приймач (2) повзуна, рухомий повзун (3) і привідний елемент (5), причому між повзуном (3) і привідним елементом (5) передбачені поверхні (301, 302) ковзання, при цьому між повзуном (3) і приймачем (2) повзуна розташована напрямна (6) у формі ластівчина хвоста або призми, з поверхнями (31-34) ковзання на повзуні (3) і поверхнями (21-24) ковзання на приймачі (2) повзуна, який відрізняється тим, що передбачені на повзуні (3) поверхні (32, 34) ковзання, через які передаються сили від приймача (2) повзуна на повзун (3) в процесі робочого ходу, при якому повзун (3) переміщається назовні, знаходячись між привідним елементом (5) і приймачем (2) повзуна, розташовані під кутом одна до одної. 2. Клиновий механізм за п. 1, який відрізняється тим, що поверхні (32, 34) ковзання, через які передаються сили в процесі робочого ходу, більші, ніж передбачені на повзуні (3) поверхні (31, 33) ковзання, через які передаються сили від приймача (2) повзуна на повзун (3) при зворотному ході, в процесі якого приймач (2) повзуна віддаляється від привідного елемента (5). 3. Клиновий механізм за п. 1 або 2, який відрізняється тим, що напрямна (6) у формі ластівчина хвоста або призми включає щонайменше дві розташовані під кутом одна до одної напрямні пластини. 4. Клиновий механізм за п. 3, який відрізняється тим, що напрямні пластини (26, 27) напрямної (6) у формі ластівчина хвоста або призми мають, в загальному випадку, L-подібний переріз. 5. Клиновий механізм за будь-яким з пп. 3, 4, який відрізняється тим, що в ньому передбачені дві напрямні пластини (36, 37, 38, 39), розташовані під кутом одна до одної. 6. Клиновий механізм за будь-яким з пп. 1-5, який відрізняється тим, що напрямна (6) у формі ластівчина хвоста або призми включає з'єднання з геометричним замиканням повзуна (3) і приймача (2) повзуна. 7. Клиновий механізм за будь-яким з пп. 3-6, який відрізняється тим, що приймач (2) повзуна в зоні поверхонь (21, 22, 23, 24) ковзання та/або приймальна частина напрямних пластин (26, 27) виконані виступними. 8. Клиновий механізм за будь-яким з пп. 3-7, який відрізняється тим, що напрямні пластини (26, 27, 36, 37, 38, 39) приймача (2) повзуна та/або повзуна (3) виконані знімними і закріплені, зокрема, за допомогою кріпильних гвинтів (28, 29). 8 UA 97863 C2 5 10 15 20 25 30 35 40 9. Клиновий механізм за будь-яким з пп. 1-8, який відрізняється тим, що між повзуном (3) і привідним елементом (5) передбачена клинова напрямна. 10. Клиновий механізм за п. 9, який відрізняється тим, що клинова напрямна (50, 300) містить дві розташовані під кутом одна до одної напрямні пластини (303, 304). 11. Клиновий механізм за будь-яким з пп. 9-10, який відрізняється тим, що на повзуні (3) передбачені розташовані під кутом одна до одної напрямна (6) у формі ластівчина хвоста або призми і клинова встановлювальна поверхня (300). 12. Клиновий механізм за будь-яким з пп. 9-11, який відрізняється тим, що напрямна (6) у формі ластівчина хвоста або призми і клинова напрямна передбачені на двох суміжних сторонах повзуна (3). 13. Повзун (3) для клинового механізму (1), що включає крім того приймач (2) повзуна і привідний елемент (5), причому повзун (3) розташований між приймачем (2) повзуна і привідним елементом (5), при цьому повзун (3) містить боковину (30), виконану у формі ластівчина хвоста або призми з поверхнями (31-34) ковзання, який відрізняється тим, що передбачені на повзуні (3) поверхні (32, 34) ковзання, через які передаються сили від приймача (2) повзуна на повзун (3) в процесі робочого ходу, при якому повзун (3) переміщається назовні, знаходячись між привідним елементом (5) і приймачем (2) повзуна, розташовані під кутом одна до одної. 14. Повзун за п. 13, який відрізняється тим, що передбачені на повзуні (3) поверхні (32, 34) ковзання, через які передаються сили в процесі робочого ходу, більші, ніж передбачені на повзуні (3) поверхні (31, 33) ковзання, через які передаються сили від приймача (2) повзуна на повзун (3) при зворотному ході, в процесі якого приймач (2) повзуна віддаляється від привідного елемента (5). 15. Повзун за одним з пп. 13 або 14, який відрізняється тим, що боковина, виконана у формі ластівчина хвоста або призми, містить як напрямні пластини (36, 37, 38, 39) поверхні прилягання, особливо, для пристикування напрямних пластин. 16. Повзун за п. 15, який відрізняється тим, що в ньому передбачені дві напрямні пластини (36, 37, 38, 39), розташовані під кутом одна до одної. 17. Повзун за п. 13, який відрізняється тим, що в ньому, разом з першою, виконаною у формі ластівчина хвоста або призми боковиною (30), передбачена друга, суміжна боковина, що містить щонайменше одну клинову встановлювальну поверхню (300) для з'єднання з привідним елементом (5). 18. Повзун за п. 17, який відрізняється тим, що в ньому передбачена щонайменше одна напрямна пластина (303, 304) для стикування щонайменше з однією клиновою напрямною поверхнею. 19. Повзун за п. 13, який відрізняється тим, що повзун (3) має третю, суміжну з двома іншими сторонами, сторону, яка має ділянку для монтажу кріплення оброблювального інструмента. 20. Повзун за п. 19, який відрізняється тим, що на третій стороні є щонайменше два піднутрення та/або два пази (41) для вставляння виступних елементів (40) засобу (4) для кріплення оброблювального інструмента. 21. Повзун за п. 19 або 20, який відрізняється тим, що на третій стороні повзуна передбачена щонайменше одна клинова поверхня. 9 UA 97863 C2 10 UA 97863 C2 11 UA 97863 C2 12 UA 97863 C2 13 UA 97863 C2 14 UA 97863 C2 15 UA 97863 C2 16 UA 97863 C2 17 UA 97863 C2 18 UA 97863 C2 19 UA 97863 C2 Комп’ютерна верстка Л. Ціхановська Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 20
ДивитисяДодаткова інформація
Назва патенту англійськоюWedge drive with slide element receptacle
Автори англійськоюWeigelt, Harald
Назва патенту російськоюКлиновой механизм с приемником ползуна
Автори російськоюВайгельт Гаральд
МПК / Мітки
МПК: B30B 1/40
Мітки: повзуна, клиновий, приймачем, механізм
Код посилання
<a href="https://ua.patents.su/22-97863-klinovijj-mekhanizm-z-prijjmachem-povzuna.html" target="_blank" rel="follow" title="База патентів України">Клиновий механізм з приймачем повзуна</a>
Універсальний компенсатор похибок напряму повзуна
Номер патенту: 38814
Опубліковано: 26.01.2009
Автори: Макєєв Володимир Сергійович, Кухар Володимир Валентинович, Балалаєва Олена Юріївна
МПК: B21B 23/00, B30B 15/28
Мітки: повзуна, напряму, універсальний, похибок, компенсатор
Формула / Реферат:
Універсальний компенсатор похибок напряму повзуна, який містить складений елемент, що виконаний у вигляді двох пружних пластин із отворами, одна з яких має можливість переміщення поворотом відносно іншої, при цьому вони встановлені між опорними поверхнями повзуна й верхньої плити штампа, до котрої кріпиться гвинтовим з'єднанням хвостовик, на який надягнений та сполучений за допомогою пружини ковпак із зубом, який відрізняється тим, що...
Компенсатор похибок напряму повзуна пресів
Номер патенту: 24638
Опубліковано: 10.07.2007
Автори: Кравченко Наталя Євгенівна, Тихонський Олександр Адамович, Євтєєв Артем Ігоревич, Діамантопуло Костянтин Костянтинович
МПК: B21D 37/00
Мітки: повзуна, компенсатор, похибок, напряму, пресів
Формула / Реферат:
Компенсатор похибок напряму повзуна пресів, який містить опорні поверхні контакту з опорними поверхнями повзуна та верхньої плити та пружний елемент у вигляді пластини змінної жорсткості по висоті, розташований проміж ними, який відрізняється тим, що на опорні поверхні контакту з опорними поверхнями повзуна та верхньої плити штампа зафіксовано встановлені металеві захисні пластини з товщиною S, що визначається із співвідношення:
Клиновий прес
Номер патенту: 54739
Опубліковано: 17.03.2003
Автори: Чоста Наталія Вікторівна, Роганов Лев Леонідович
МПК: B30B 1/00
Формула / Реферат:
Клиновий прес, що містить розміщені на станині повзун, шарнір, упорну деталь, основний клин, установлений на станині з можливістю переміщення від приводу в площині, перпендикулярній площині переміщення повзуна, із двома робочими поверхнями - криволінійною, що взаємодіє із шарніром, установленим циліндричною опорною поверхнею на повзуні, і прямолінійною, що взаємодіє з робочою поверхнею додаткового клина, змонтованого на упорній деталі, який...
Спосіб кріплення верхньої плити штампа до повзуна преса
Номер патенту: 37242
Опубліковано: 25.11.2008
Автори: Лаврентік Ольга Олександрівна, Кухар Володимир Валентинович, Макєєв Володимир Сергійович, Діамантопуло Костянтин Костянтинович, Балалаєва Олена Юріївна
МПК: B30B 15/28
Мітки: повзуна, штампа, кріплення, верхньої, плити, преса, спосіб
Формула / Реферат:
Спосіб кріплення верхньої плити штампа до повзуна преса, який включає встановлення штампа на стіл преса, опускання повзуна у крайнє нижнє положення із дотиком у опорну поверхню верхньої плити, регулювання міжштампового простору і закріплення верхньої плити до повзуна преса за допомогою шайб, стяжних гайок та гвинтів, заведених в Т-подібні пази повзуна, який відрізняється тим, що перед опусканням повзуна у крайнє нижнє положення на опорну...
Привідний механізм поршневого насоса

Номер патенту: 80565
Опубліковано: 10.10.2007
Автори: Кульов Сергій Васильович, Садлаєв Олег Османович
МПК: F04B 9/02, F16H 21/28
Мітки: насоса, механізм, поршневого, привідний
Формула / Реферат:
Привідний механізм поршневого насоса, який містить корпус із торцевими кришками, привідне колесо, яке розташоване в корпусі, з встановленим у ньому з можливістю обертання головним кривошипом, два повзуни з пальцями, які розташовані у відповідних напрямних прямолінійного руху, повзуни розташовані у взаємно перпендикулярних площинах, і два додаткових кривошипи, які жорстко з'єднані з головним кривошипом і які мають із ним однакові радіуси...
Попередній патент: Регулювання перешкод з використанням чергувань запитів harq
Наступний патент: Пристрій для очищення рами камери коксування коксової печі
Випадковий патент: Залізобетонна плита по профільованому настилу