Системи і способи створення карт-приписів і ділянок
Формула / Реферат
1. Спосіб генерування карти-припису щільності посіву насіння, який включає в себе множинні зони базової норми і множинні ділянки в рамках кожної зони базової норми, причому кожна з множинних ділянок містить норми щільності, які відрізняються від оточуючої зони базової норми, при цьому згаданий спосіб включає в себе: ідентифікацію контуру поля; ідентифікацію множинних зон базової норми в межах контуру згаданого поля;
призначення базової норми щільності для кожної зони базової норми; ідентифікацію придатних зон розміщення ділянки в межах кожної зони базової норми на основі правила першого розміщення, причому кожна зона розміщення ділянки містить площу в межах зони базової норми, в якій одна або більше ділянок можуть розміщуватися; визначення розмірів ділянки на основі перших вхідних даних користувача; і визначення місця розташування ділянки в межах згаданих придатних зон розміщення ділянки на основі других вхідних даних користувача і правила другого розміщення.
2. Спосіб за п. 1, в якому згадане правило першого розміщення вимагає мінімальної відстані між контурами зон базової норми і ділянок.
3. Спосіб за п. 1, в якому згадані перші вхідні дані користувача містять ширину або кількість рядів жниварки комбайна, що підлягає використанню при збиранні урожаю з поля, засіяного відповідно до згаданої карти-припису.
4. Спосіб за п. 1, в якому другі вхідні дані користувача містять співвідношення між площею групи ділянок і площею зони, що прилягає до групи ділянок.
5. Спосіб за п. 1, в якому згадане правило другого розміщення вимагає мінімальної кількості ділянок базової норми сусідніх суміжних з кожною ділянкою, причому згадані ділянки базової норми мають мінімальну площу.
6. Спосіб за п. 1, що додатково включає в себе: визначення норми щільності в межах кожної ділянки на основі третіх вхідних даних користувача.
7. Спосіб за п. 6, причому згадані треті вхідні дані користувача включають в себе коливання в нормах щільності.
8. Спосіб за п. 6, що додатково включає в себе: запит користувача прийняти або відхилити місця розташування ділянки; і зміну згаданого місця розташування ділянки на основі відхилення користувачем.
9. Спосіб генерування поля, яке включає в себе множинні зони базової норми і множинні ділянки в межах кожної зони базової норми, причому кожна з множинних ділянок містить норми щільності, які відрізняються від оточуючої зони базової норми, при цьому згаданий спосіб включає:
(a) генерування карти-припису згідно з наступними етапами:
(і) ідентифікація контуру поля;
(іі) ідентифікація множинних зон базової норми в межах контуру згаданого поля;
(ііі) призначення базової норми щільності для кожної зони базової норми;
(iv) ідентифікація придатних зон розміщення ділянки в межах кожної зони базової норми на основі правила першого розміщення, причому кожна зона розміщення ділянки містить площу в межах зони базової норми, в якій одна або більше ділянок можуть розміщуватися;
(v) визначення розмірів ділянки на основі перших вхідних даних користувача;
(vi) визначення місць розташування ділянки в межах згаданих придатних зон розміщення ділянки на основі других вхідних даних користувача і правила другого розміщення; і
(vii) визначення норм щільності посіву насіння в межах кожної ділянки на основі третіх вхідних даних користувача;
(b) контроль норми щільності посіву насіння сівалки відповідно до згаданої карти-припису, і (c) відображення місця розташування принаймні однієї з ділянок на полі під час збирання врожаю на полі.
10. Спосіб за п. 9, що додатково включає в себе:
(d) попередження користувача про необхідність налаштування жниварки комбайна по відношенню до принаймні однієї з ділянок, під час збирання урожаю на полі.
11. Спосіб за п. 9, який додатково включає в себе:
(е) запис показника врожайності в кожному місці розташування на полі під час збирання урожаю на полі; і
(f) порівняння показника врожайності в межах щонайменше однієї із зон базової норми в межах щонайменше однієї з ділянок.
Текст
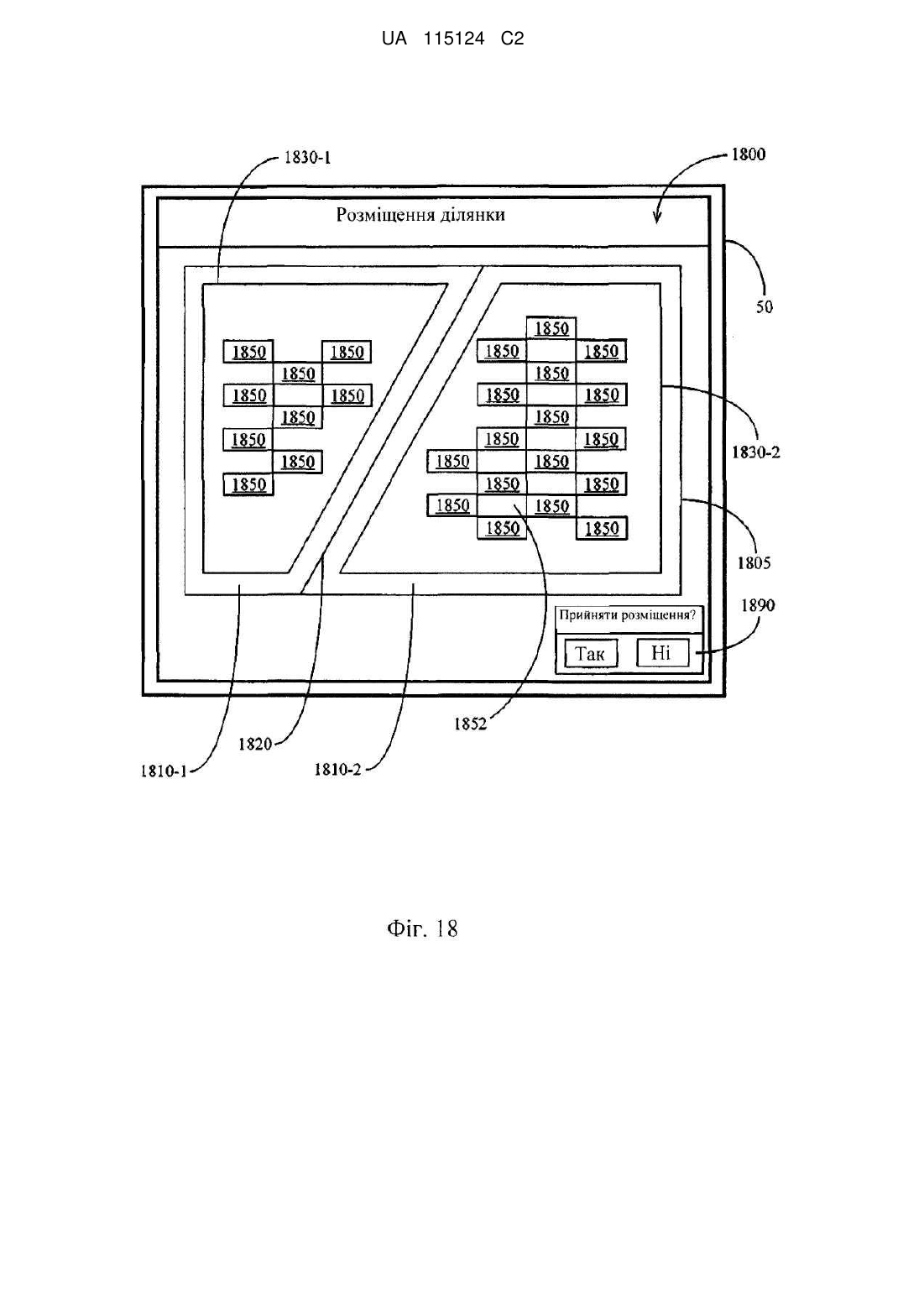
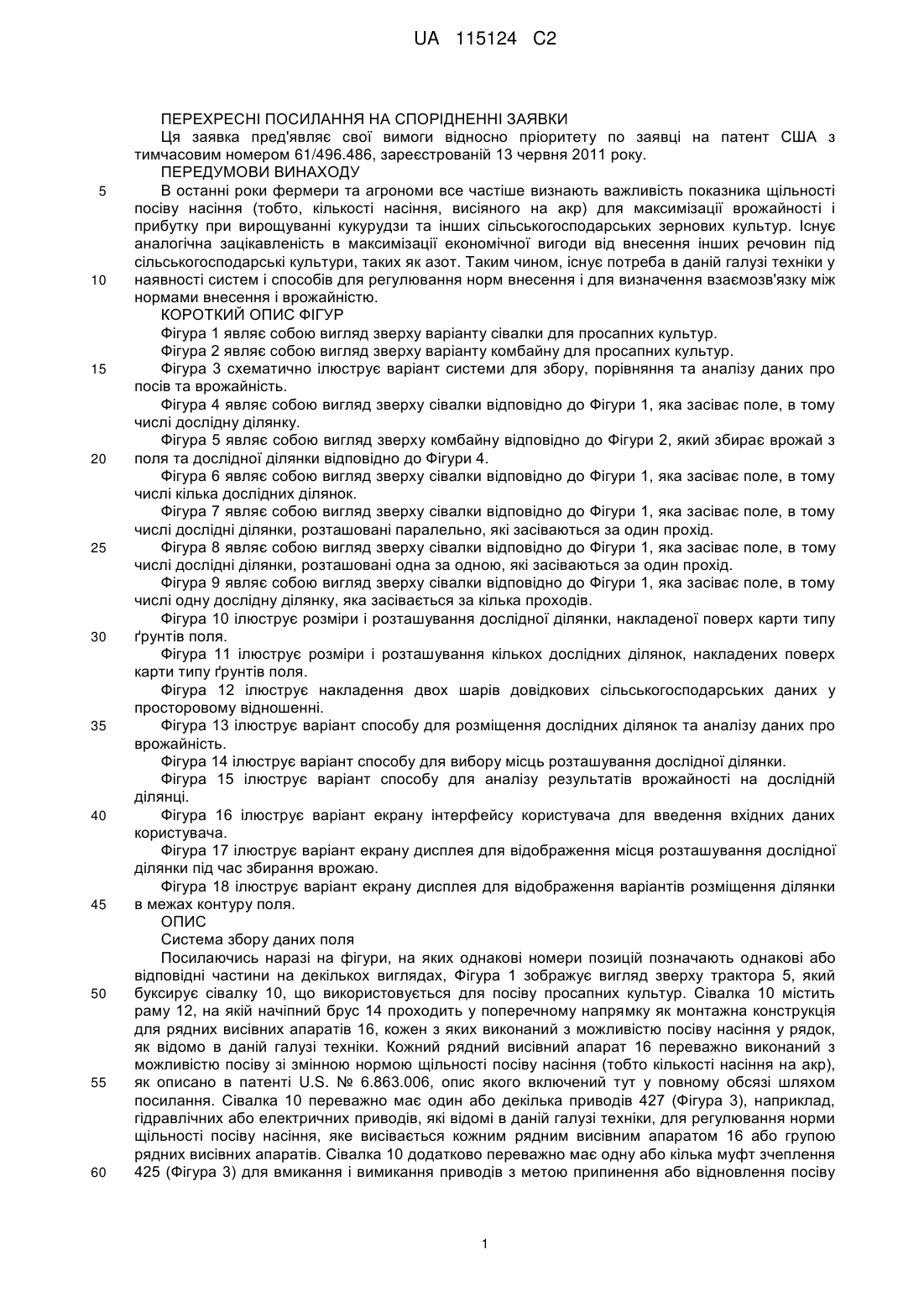
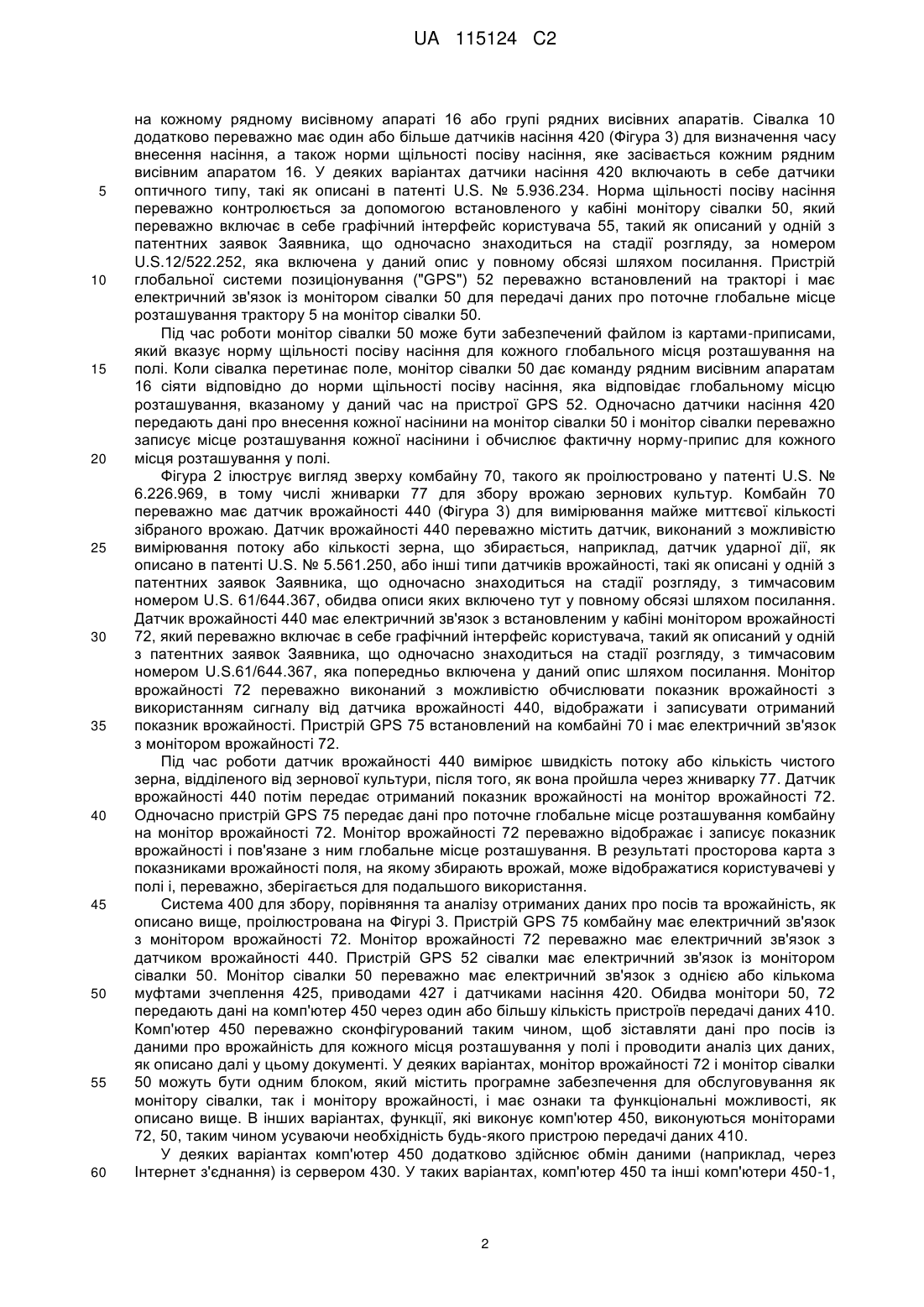
Реферат: Системи, способи і пристрій для розміщення ділянки на сільськогосподарському полі. Також пропонуються системи і способи для вибору місця розташування ділянки на основі первинних і вторинних параметрів, для вибору місця розташування ділянки на основі заданих користувачем параметрів, а також для надання користувачеві можливості прийняти або відхилити запропоноване розміщення ділянки. UA 115124 C2 (12) UA 115124 C2 UA 115124 C2 5 10 15 20 25 30 35 40 45 50 55 60 ПЕРЕХРЕСНІ ПОСИЛАННЯ НА СПОРІДНЕННІ ЗАЯВКИ Ця заявка пред'являє свої вимоги відносно пріоритету по заявці на патент США з тимчасовим номером 61/496.486, зареєстрованій 13 червня 2011 року. ПЕРЕДУМОВИ ВИНАХОДУ В останні роки фермери та агрономи все частіше визнають важливість показника щільності посіву насіння (тобто, кількості насіння, висіяного на акр) для максимізації врожайності і прибутку при вирощуванні кукурудзи та інших сільськогосподарських зернових культур. Існує аналогічна зацікавленість в максимізації економічної вигоди від внесення інших речовин під сільськогосподарські культури, таких як азот. Таким чином, існує потреба в даній галузі техніки у наявності систем і способів для регулювання норм внесення і для визначення взаємозв'язку між нормами внесення і врожайністю. КОРОТКИЙ ОПИС ФІГУР Фігура 1 являє собою вигляд зверху варіанту сівалки для просапних культур. Фігура 2 являє собою вигляд зверху варіанту комбайну для просапних культур. Фігура 3 схематично ілюструє варіант системи для збору, порівняння та аналізу даних про посів та врожайність. Фігура 4 являє собою вигляд зверху сівалки відповідно до Фігури 1, яка засіває поле, в тому числі дослідну ділянку. Фігура 5 являє собою вигляд зверху комбайну відповідно до Фігури 2, який збирає врожай з поля та дослідної ділянки відповідно до Фігури 4. Фігура 6 являє собою вигляд зверху сівалки відповідно до Фігури 1, яка засіває поле, в тому числі кілька дослідних ділянок. Фігура 7 являє собою вигляд зверху сівалки відповідно до Фігури 1, яка засіває поле, в тому числі дослідні ділянки, розташовані паралельно, які засіваються за один прохід. Фігура 8 являє собою вигляд зверху сівалки відповідно до Фігури 1, яка засіває поле, в тому числі дослідні ділянки, розташовані одна за одною, які засіваються за один прохід. Фігура 9 являє собою вигляд зверху сівалки відповідно до Фігури 1, яка засіває поле, в тому числі одну дослідну ділянку, яка засівається за кілька проходів. Фігура 10 ілюструє розміри і розташування дослідної ділянки, накладеної поверх карти типу ґрунтів поля. Фігура 11 ілюструє розміри і розташування кількох дослідних ділянок, накладених поверх карти типу ґрунтів поля. Фігура 12 ілюструє накладення двох шарів довідкових сільськогосподарських даних у просторовому відношенні. Фігура 13 ілюструє варіант способу для розміщення дослідних ділянок та аналізу даних про врожайність. Фігура 14 ілюструє варіант способу для вибору місць розташування дослідної ділянки. Фігура 15 ілюструє варіант способу для аналізу результатів врожайності на дослідній ділянці. Фігура 16 ілюструє варіант екрану інтерфейсу користувача для введення вхідних даних користувача. Фігура 17 ілюструє варіант екрану дисплея для відображення місця розташування дослідної ділянки під час збирання врожаю. Фігура 18 ілюструє варіант екрану дисплея для відображення варіантів розміщення ділянки в межах контуру поля. ОПИС Система збору даних поля Посилаючись наразі на фігури, на яких однакові номери позицій позначають однакові або відповідні частини на декількох виглядах, Фігура 1 зображує вигляд зверху трактора 5, який буксирує сівалку 10, що використовується для посіву просапних культур. Сівалка 10 містить раму 12, на якій начіпний брус 14 проходить у поперечному напрямку як монтажна конструкція для рядних висівних апаратів 16, кожен з яких виконаний з можливістю посіву насіння у рядок, як відомо в даній галузі техніки. Кожний рядний висівний апарат 16 переважно виконаний з можливістю посіву зі змінною нормою щільності посіву насіння (тобто кількості насіння на акр), як описано в патенті U.S. № 6.863.006, опис якого включений тут у повному обсязі шляхом посилання. Сівалка 10 переважно має один або декілька приводів 427 (Фігура 3), наприклад, гідравлічних або електричних приводів, які відомі в даній галузі техніки, для регулювання норми щільності посіву насіння, яке висівається кожним рядним висівним апаратом 16 або групою рядних висівних апаратів. Сівалка 10 додатково переважно має одну або кілька муфт зчеплення 425 (Фігура 3) для вмикання і вимикання приводів з метою припинення або відновлення посіву 1 UA 115124 C2 5 10 15 20 25 30 35 40 45 50 55 60 на кожному рядному висівному апараті 16 або групі рядних висівних апаратів. Сівалка 10 додатково переважно має один або більше датчиків насіння 420 (Фігура 3) для визначення часу внесення насіння, а також норми щільності посіву насіння, яке засівається кожним рядним висівним апаратом 16. У деяких варіантах датчики насіння 420 включають в себе датчики оптичного типу, такі як описані в патенті U.S. № 5.936.234. Норма щільності посіву насіння переважно контролюється за допомогою встановленого у кабіні монітору сівалки 50, який переважно включає в себе графічний інтерфейс користувача 55, такий як описаний у одній з патентних заявок Заявника, що одночасно знаходиться на стадії розгляду, за номером U.S.12/522.252, яка включена у даний опис у повному обсязі шляхом посилання. Пристрій глобальної системи позиціонування ("GPS") 52 переважно встановлений на тракторі і має електричний зв'язок із монітором сівалки 50 для передачі даних про поточне глобальне місце розташування трактору 5 на монітор сівалки 50. Під час роботи монітор сівалки 50 може бути забезпечений файлом із картами-приписами, який вказує норму щільності посіву насіння для кожного глобального місця розташування на полі. Коли сівалка перетинає поле, монітор сівалки 50 дає команду рядним висівним апаратам 16 сіяти відповідно до норми щільності посіву насіння, яка відповідає глобальному місцю розташування, вказаному у даний час на пристрої GPS 52. Одночасно датчики насіння 420 передають дані про внесення кожної насінини на монітор сівалки 50 і монітор сівалки переважно записує місце розташування кожної насінини і обчислює фактичну норму-припис для кожного місця розташування у полі. Фігура 2 ілюструє вигляд зверху комбайну 70, такого як проілюстровано у патенті U.S. № 6.226.969, в тому числі жниварки 77 для збору врожаю зернових культур. Комбайн 70 переважно має датчик врожайності 440 (Фігура 3) для вимірювання майже миттєвої кількості зібраного врожаю. Датчик врожайності 440 переважно містить датчик, виконаний з можливістю вимірювання потоку або кількості зерна, що збирається, наприклад, датчик ударної дії, як описано в патенті U.S. № 5.561.250, або інші типи датчиків врожайності, такі як описані у одній з патентних заявок Заявника, що одночасно знаходиться на стадії розгляду, з тимчасовим номером U.S. 61/644.367, обидва описи яких включено тут у повному обсязі шляхом посилання. Датчик врожайності 440 має електричний зв'язок з встановленим у кабіні монітором врожайності 72, який переважно включає в себе графічний інтерфейс користувача, такий як описаний у одній з патентних заявок Заявника, що одночасно знаходиться на стадії розгляду, з тимчасовим номером U.S.61/644.367, яка попередньо включена у даний опис шляхом посилання. Монітор врожайності 72 переважно виконаний з можливістю обчислювати показник врожайності з використанням сигналу від датчика врожайності 440, відображати і записувати отриманий показник врожайності. Пристрій GPS 75 встановлений на комбайні 70 і має електричний зв'язок з монітором врожайності 72. Під час роботи датчик врожайності 440 вимірює швидкість потоку або кількість чистого зерна, відділеного від зернової культури, після того, як вона пройшла через жниварку 77. Датчик врожайності 440 потім передає отриманий показник врожайності на монітор врожайності 72. Одночасно пристрій GPS 75 передає дані про поточне глобальне місце розташування комбайну на монітор врожайності 72. Монітор врожайності 72 переважно відображає і записує показник врожайності і пов'язане з ним глобальне місце розташування. В результаті просторова карта з показниками врожайності поля, на якому збирають врожай, може відображатися користувачеві у полі і, переважно, зберігається для подальшого використання. Система 400 для збору, порівняння та аналізу отриманих даних про посів та врожайність, як описано вище, проілюстрована на Фігурі 3. Пристрій GPS 75 комбайну має електричний зв'язок з монітором врожайності 72. Монітор врожайності 72 переважно має електричний зв'язок з датчиком врожайності 440. Пристрій GPS 52 сівалки має електричний зв'язок із монітором сівалки 50. Монітор сівалки 50 переважно має електричний зв'язок з однією або кількома муфтами зчеплення 425, приводами 427 і датчиками насіння 420. Обидва монітори 50, 72 передають дані на комп'ютер 450 через один або більшу кількість пристроїв передачі даних 410. Комп'ютер 450 переважно сконфігурований таким чином, щоб зіставляти дані про посів із даними про врожайність для кожного місця розташування у полі і проводити аналіз цих даних, як описано далі у цьому документі. У деяких варіантах, монітор врожайності 72 і монітор сівалки 50 можуть бути одним блоком, який містить програмне забезпечення для обслуговування як монітору сівалки, так і монітору врожайності, і має ознаки та функціональні можливості, як описано вище. В інших варіантах, функції, які виконує комп'ютер 450, виконуються моніторами 72, 50, таким чином усуваючи необхідність будь-якого пристрою передачі даних 410. У деяких варіантах комп'ютер 450 додатково здійснює обмін даними (наприклад, через Інтернет з'єднання) із сервером 430. У таких варіантах, комп'ютер 450 та інші комп'ютери 450-1, 2 UA 115124 C2 5 10 15 20 25 30 35 40 45 50 55 60 які знаходяться під управлінням інших користувачів, можуть передавати дані про посів та збір врожаю на сервер 430. Ці ж дані переважно отримані за допомогою комп'ютера 450 для використання в порівнянні результатів між полями. Створення ділянки та збір врожаю Посилаючись на Фігуру 4, сівалка 10, як описано вище, проілюстрована під час виконання посівних операцій у полі 100, результатом яких є посівна площа 190. Сівалка 10 засіває поле 100 із первинною нормою щільності посіву насіння, позначеною позицією 110. Первинна норма щільності посіву насіння 110 являє собою базову норму, яка була визначена користувачем як бажана для поля 100. Наприклад, первинна норма щільності посіву насіння для посіву кукурудзи може становити 30.000 насінин на акр. Користувач переважно має можливість експериментувати з результатами врожайності внаслідок іншої щільності посіву насіння шляхом посіву із вторинною нормою щільності посіву насіння, яка позначена позицією 120 на ділянці 160 в межах того самого поля. Як приклад, вторинна норма щільності посіву насіння для посіву кукурудзи може становити 32.000 насінин на акр. Щоб генерувати ділянку 160, на якій вторинна норма щільності посіву насіння 120, засіяна як показано на Фігурі 4, монітор сівалки 50 (Фігура 1) переважно змінює задану норму щільності посіву насіння на вторинну норму щільності посіву насіння 120, коли пристрій GPS 52 повідомляє, що він досяг першого контуру 162. Монітор 50 потім змінює задану норму щільності посіву насіння знову на первинну норму щільності посіву насіння 110, коли пристрій GPS 52 повідомляє, що він досяг другого контуру 164. Як показано на Фігурі 5, комбайн 70, як описано вище, проілюстрований під час збору врожаю з поля 100, яке мало ділянку 160. Засіяна, але незібрана площа, позначена позицією 195. Слід мати на увазі, що один датчик врожайності 440 зазвичай вимірює швидкість потоку або кількість зерна, яке збирається всією жниваркою 77 (Фігура 2). Таким чином, коли комбайн перетинає контур 164 і починає збирати врожай з ділянки 160, жниварка 77 переважно розміщується у належному положенні для збору врожаю тільки на ділянці 160. У такий спосіб, під час перегляду даних про зібраний врожай можливо відрізнити результати врожайності для первинної норми щільності посіву насіння 110 від вторинної норми щільності посіву насіння 120. Результати кількох способів розміщення множинних ділянок на одному полі 100 проілюстровані на Фігурах 6-8. На фігурі 6, спосіб, який використовується для засівання ділянки 160, повторюється в іншому місці на полі для того, щоб генерувати другу ділянку 170, на якій була застосована третинна норма щільності посіву насіння, позначена позицією 122. На Фігурі 7, сівалка 10 формує дві паралельні ділянки 160 і 170, на яких були застосовані норми щільності посіву насіння 120 і 122 відповідно. Паралельні ділянки, зображені на Фігурі 7, генеруються шляхом зміни норми щільності посіву насіння, заданої для окремих рядних висівних апаратів 16 або їх груп, змонтованих на начіпному брусі 14. З метою реалізації цього способу, окремо керований привід передбачено для рядних висівних апаратів 16 або їх груп, як описано в патенті U.S. № 6.070.539, який включено у даний опис у повному обсязі шляхом посилання. При формуванні таких паралельних ділянок, сівалка 10 переважно має можливість засівати буферну площу 165, яка засівається за первинною нормою щільності посіву насіння 110 між ділянками 160, 170. На Фігурі 8 зображена основна ділянка 150, яка включає в себе кілька ділянок, розташованих одна за одною, 160, 170 169, 165 і 166, які засіваються за нормами щільності посіву насіння 120, 122, 124, 110 і 126 відповідно. Цей спосіб здійснюється шляхом зміни заданої норми щільності посіву насіння між кожною ділянкою. Як проілюстровано на Фігурі 8, монітор сівалки 50 змінює задану норму безпосередньо між непервинними нормами щільності посіву насіння (наприклад, між ділянками 169 і 170). Крім того, монітор сівалки 50 задає первинну норму 110 у буферній площі 165 між непервинними нормами щільності посіву насіння (наприклад, між ділянками 169 і 166). Як проілюстровано на Фігурі 9, сівалка 10 має можливість засівати одну ділянку, використовуючи декілька проходів. Ділянка 160, яка має вторинну норму щільності посіву насіння 120, може бути засіяна як дві секції ділянки 160-1, 160-2. Норма щільності посіву насіння задана для групи лівосторонніх рядних висівних апаратів 16 змінюється під час перетину верхнього контуру ділянки 160 з метою засівання першої секції ділянки 160-1. Подібним чином, норма щільності посіву насіння, задана для тієї ж самої або іншої групи лівосторонніх рядних висівних апаратів 16, переважно змінюється при перетині нижнього контуру ділянки 160 з метою засівання другої секції ділянки 160-2. Розміри і розташування ділянки Множинні фактори впливають на переважні розміри і розташування кожної ділянки 160. Посилаючись на Фігуру 10, кожна ділянка 160 переважно має критично важливу площу А для отримання результатів під час збирання врожаю, що має потрібну статистичну значущість. Як 3 UA 115124 C2 5 10 15 20 25 30 35 40 45 50 55 60 проілюстровано, ділянка 160 має довжину L вздовж напрямку руху під час посіву та збирання врожаю і поперечну ширину W. Ширина W переважно є кратною ширині жниварки 77 комбайну, таким чином, щоб комбайн 70 міг збирати врожай на всій ділянці 160, без одночасного скошування зернових культур, засіяних із первинною нормою щільності посіву насіння. Крім того, бажана мінімальна довжина L залежить частково від розподільчої здатності датчика врожайності комбайну. Тобто, різні типи або моделі датчиків врожайності мають різну здатність визначати, чи швидкість потоку або кількість зерна, виміряні поблизу передньої і задньої меж ділянки, пов'язані із площею ділянки або суміжною площею. У тих випадках, коли цей ефект є більш значущим, більша довжина L ділянки є кращою. Потрібне місце розташування ділянки переважно частково визначається типами ґрунтів або родючістю ґрунтів поля. Поле 100 на Фігурі 10 включає в себе зони, які мають типи ґрунтів, позначені позиціями 414, 410 і 412. Як проілюстровано, ділянка 160 переважно розташована на переважаючому типі ґрунту 410 поля 100 (тобто, на ґрунті, який є присутнім на найбільшій площі поля). Ділянка 160 переважно розташована таким чином, що ділянка має мінімальну відстань D2 від будь-якого типу ґрунту, відмінного від типу ґрунту ділянки. Слід розуміти, що переважна мінімальна відстань D2 залежить від розподільчої здатності датчика врожайності. Подібним чином, ділянка 160 переважно розташована таким чином, що ділянка має мінімальну відстань Dl від будь-якого контуру поля або водної поверхні. Посилаючись на Фігуру 11, форма ділянки може змінюватися з метою формування ділянки, що має бажаний розмір і розташування. Поле на Фігурі 11 включає в себе типи ґрунтів 410, 412 і 414, серед яких тип ґрунту 410 переважає, як проілюстровано. Для того, щоб засіяти дві ділянки, які мають потрібну критично важливу площу А в межах переважаючого типу ґрунту 410, перша ділянка 170, що має довжину L1 і ширину W1, засівається разом із другою ділянкою 160, що має довжину L2 і ширину W2. Автоматичне розміщення ділянки і способи аналізу Спосіб 300 розміщення ділянок у полі під час посіву проілюстровано на Фігурі 13. На етапі 302, монітор сівалки 50 переважно пропонує користувачеві ввести GPS зміщення для сівалки, тобто напрямок руху і поперечні зміщення між пристроєм GPS 52 і кожним рядним висівним апаратом сівалки. На етапі 305, монітор 50 переважно пропонує користувачеві забезпечити набір параметрів вибору ділянки і набір характеристик начіпного обладнання. Для виконання цього етапу, монітор сівалки переважно відображає екран 1400 для отримання вхідних даних користувача, як проілюстровано на Фігурі 16 на графічному інтерфейсі користувача 55. Для введення характеристик начіпного обладнання, екран 1400 переважно включає в себе інтерфейс 1410 для введення ширини (або кількості та інтервалу між рядками) жниварки комбайну, що буде використовуватися для збирання врожаю, та ширини (або кількості та інтервалу між рядками) незалежно керованих секцій сівалки, що буде використовуватися для посіву, інтерфейс 1450 для вибору типу сільськогосподарської культури, що має засіватися, та інтерфейс 1440 для вибору типу і моделі датчика врожайності, що буде використовуватися при збиранні врожаю. Для введення параметрів вибору ділянки, екран 1400 переважно включає в себе інтерфейс 1420 для введення кількості варіантів бажаних норм щільності посіву насіння та інтерфейс 1430 для введення відсотку посівної площі поля, що має бути включений у ділянки. В інших варіантах, інтерфейс 1430 дозволяє користувачеві вибрати співвідношення між загальною посівною площею ділянок у межах зони базової норми (Фігура 18) і посівною площею зони базової норми. Інтерфейс 1420 переважно дозволяє користувачеві визначити максимальну зміну припису 1424 і мінімальну зміну припису 1422. У деяких варіантах, інтерфейс 1420 додатково дозволяє користувачеві вибрати переважну статистичну зміну (наприклад, стандартне відхилення) значень припису для ділянки. Слід мати на увазі, що деякі з параметрів вибору ділянки включають преференції з ризиком користувача, оскільки кількість посівної площі, розміщеної на ділянках, і зміна щільності посіву насіння на ділянках, являють собою обсяг економічного ризику, який бере на себе користувач для того, щоб дізнатися оптимальну щільність посіву насіння для майбутніх сезонів. Слід мати на увазі, що інтерфейси користувача можуть містити поля введення тексту, випадні меню або змінні шкали, як проілюстровано на Фігурі 16, або будьякі інші відповідні інтерфейси, які є відомими у даній галузі техніки. Повертаючись до Фігури 13, на етапі 310 монітор сівалки 50 переважно визначає набір характеристик ділянки, включаючи місце розташування ділянок, розмір ділянок, а також норми щільності посіву насіння, за якими мають бути засіяні ділянки. Переважний спосіб виконання етапу 310 за Фігурою 13 детально проілюстровано на Фігурі 14. При виконанні етапів способу на Фігурі 14, монітор сівалки 50 переважно відображає екран розміщення ділянки 1800, як проілюстровано на Фігурі 18. На етапі 1902, монітор сівалки 50 переважно визначає контур поля 4 UA 115124 C2 5 10 15 20 25 30 35 40 45 50 55 60 1805. У деяких варіантах, контур поля 1805 є доступним з файлу, що містить вершини глобального позиціонування, записані користувачем при прокладенні контуру поля з пристроєм GPS, як відомо в даній галузі техніки. В інших варіантах, контур поля 1805 є доступним з файлу, що містить вершини глобального позиціонування, введені користувачем, наприклад, шляхом проведення контуру навколо аерознімку поля, як відомо в даній галузі техніки. На етапі 1905, монітор сівалки 50 переважно визначає зони базової норми 1810 в межах контуру поля 1805. На Фігурі 18, були визначені дві зони базової норми 1810-1, 1810-2, розділені контуром базової норми 1820. Зонами базової норми 1810 є переважно ті зони, в яких однакова базова норма щільності посіву насіння є бажаною. У деяких варіантах, зони базової норми 1810 визначені шляхом доступу до карти типу ґрунтів Міністерства сільського господарства США (USDA), включаючи полігони типу ґрунтів (наприклад, як описано у одній з патентних заявок Заявника згідно з РСТ, що одночасно знаходиться на стадії розгляду, за номером PCT/US11/68219, яка включена в даний опис у повному обсязі шляхом посилання, і яка визначає геометричні поєднання між контуром поля і одним або кількома полігонами типу ґрунту. В інших варіантах, зони базової норми 1810 включають в себе будь-яку зону, в якій певні просторові характеристики поля (наприклад, тип ґрунту, дренажні характеристики і висота над рівнем моря) є спільними. На етапі 1910, монітор сівалки 50 переважно дозволяє користувачеві визначити норму щільності посіву насіння в зонах базової норми 1810. Продовжуючи посилатися на Фігуру 14, на етапі 1915, монітор сівалки 50 переважно визначає придатну зону розміщення ділянки 1830 в межах кожної зони базової норми 1810. Як проілюстровано на Фігурі 18, придатні зони розміщення ділянки 1830-1, 1830-2 були визначені як зони, відокремлені від контуру поля 1830 і контуру базової норми 1820 певною мінімальною відстанню або мінімальними відстанями, при цьому такі мінімальні відстані переважно визначаються так, як обговорювалося тут з посиланням на Фігуру 10. Продовжуючи посилатися на Фігуру 14, на етапі 1915, монітор сівалки 50 переважно визначає розміри ділянки на основі характеристик начіпного обладнання, які були введені користувачем на етапі 305 способу 300. Таке визначення переважно здійснюється, як описано тут з посиланням на Фігуру 10. На етапі 1925, монітор сівалки 50 переважно розміщує ділянки 1850 (Фігура 18) в межах придатних зон розміщення ділянки 1830. Розміщення ділянки переважно задовольняє параметри вибору ділянки, введені користувачем на етапі 305 способу 300. Наприклад, співвідношення між загальною площею ділянок 1850 і загальною площею контуру поля 1805 переважно дорівнює співвідношенню, обраному користувачем за допомогою інтерфейсу 1430 екрану 1400 (Фігура 16). Розміщення ділянки переважно задовольняє набір правил розміщення ділянки, переважно попередньо завантажений у пам'ять монітору сівалки 50. Наприклад, правила розміщення ділянки переважно вимагають мінімальної кількості суміжних ділянок базової норми 1852, що мають мінімальну площу. У деяких варіантах, мінімальна кількість дорівнює трьом, а мінімальна площа є такою ж, як площа ділянок 1850, в результаті чого отримують структуру "шахівниці", як проілюстровано на Фігурі 18. В інших варіантах, правила розміщення ділянки можуть потребувати максимально можливої відстані між ділянками 1850, при цьому задовольняючи бажану загальну посівну площу ділянки. Продовжуючи посилатися на Фігуру 14, на етапі 1930, монітор сівалки 50 переважно обирає норми для ділянок, щоб задовольнити преференції розподілу, введені користувачем на етапі 305 способу 300. На етапі 1935, монітор сівалки 50 переважно відображає запропоноване розміщення ділянки для користувача і запитує дозвіл користувача на розміщення ділянки, наприклад, шляхом відображення інтерфейсу 1890 (Фігура 18). На етапі 1940, якщо запропоноване розміщення ділянки було відхилене, тоді на етапі 1945 монітор сівалки 50 переважно дозволяє користувачеві відхиляти окремі небажані ділянки, а потім повторює етапи від 1925 по 1935, не розміщуючи ділянку поруч з відхиленим місцем розташування. Після того, як запропоноване розміщення ділянки було прийняте, монітор сівалки 50 зберігає карту-припис, включаючи запропоноване розміщення ділянки на етапі 1950. У деяких варіантах способу, проілюстрованого на Фігурі 14, монітор сівалки 50 довільно обирає серед потенційних площ ділянки, відображає довільний вибір для користувача, і дозволяє користувачеві відхилити окремі площі ділянки або відхилити всю карту, і зробити запит іншого довільного набору ділянок. Повертаючись до Фігури 13, після того, як заплановані місця розташування ділянки були визначені, сівалка 10 переважно починає засівати з первинною нормою щільності посіву насіння (наприклад, за нормою 110 на Фігурі 4) на етапі 317. На етапі 320, при виявленні контуру ділянки (наприклад, контуру 162 на Фігурі 4), монітор сівалки 50 дає команду рядним висівним апаратам, які перетинають контур, засівати ділянку з нормою щільності посіву насіння, заданою для цієї ділянки (наприклад, норма 120 на Фігурі 4). На етапі 322, монітор сівалки 50 переважно 5 UA 115124 C2 5 10 15 20 25 30 35 40 45 50 55 відображає повідомлення для користувача, що норма щільності посіву насіння для ділянки була активована. Повідомлення може містити карту із зазначенням місця розташування ділянки та поточне місцезнаходження сівалки або вікно аварійних сигналів. Слід мати на увазі, що такому повідомленню надається перевага, оскільки більшість моніторів сівалок безперервно відображають для користувача поточну активну норму щільності посіву насіння, і зміна щільності посіву насіння без пояснення під час сівби може заплутати користувача. Монітор сівалки 50 може також дозволити користувачеві перевизначити ділянку під час сівби, наприклад, давши вказівки монітору сівалки 50 задати первинну норму щільності посіву насіння, незважаючи на раніше заплановану ділянку. На етапі 330, при залишенні площі ділянки (наприклад, шляхом перетину контуру 164 на Фігурі 4), монітор сівалки 50 знову задає первинну норму щільності посіву насіння. На етапі 335, монітор сівалки 50 переважно відображає повідомлення для користувача про те, що площа ділянки була залишена. Якщо монітор сівалки 50 визначає на етапі 337, що не вся ділянка була пройдена, тоді етапи 320-335 повторюються кожен раз, коли сівалка проходить через іншу секцію ділянки (наприклад, секцію 160-2 на Фігурі 9). Після того, як монітор сівалки 50 визначає, що вся ділянка була пройдена, на етапі 340 монітор сівалки 50 переважно перевіряє і зберігає місце розташування пройденої ділянки. Продовжуючи посилатися на Фігуру 13, на етапі 341, монітор врожайності 72 переважно пропонує користувачеві ввести зміщення GPS, пов'язані з комбайном, тобто напрямок руху і поперечні зміщення між пристроєм GPS 75 і рядними апаратами комбайну. Під час збору врожаю на етапі 342, монітор врожайності 72 переважно попереджає користувача про зміщення жниварки 77 комбайну з кожної ділянки таким чином, щоб жниварка не збирала врожай зернової культури за межами площі ділянки разом із зерновими культурами, засіяними за базовою нормою або іншими нормами. Цей етап може виконуватися з використанням екрану корекції жниварки 1700, як проілюстровано на Фігурі 17. Екран корекції жниварки 1700 переважно включає в себе карту 1710, яка ілюструє суміщення жниварки 77 із ділянкою 160, і візуальний індикатор 1720, який вказує напрямок будь-якої необхідної корекції і переважно величину корекції, виражену у цілому числі рядків. Повертаючись до Фігури 13, на етапі 345 монітор врожайності 72 записує зібраний врожай для кожного місця у поля. На етапі 350, комп'ютер 450 (дивіться систему 400 на Фігурі 3) аналізує результати врожайності шляхом порівняння врожайності в межах площі ділянки із показниками врожайності на інших площах того самого поля або інших полях. Комп'ютер 450 накладає і порівнює норми щільності посіву насіння із показниками врожайності для відповідних місць розташування на полі. Наприклад, як проілюстровано на Фігурі 12, комп'ютер 450 порівнює норму щільності посіву насіння А в межах шару 502 карти посіву із відповідною врожайністю B в межах шару 504 карти врожайності. Переважний спосіб виконання етапу 350 за Фігурою 13 проілюстрований на Фігурі 15. На етапі 351 комп'ютер 450 переважно ранжує припис за врожайністю на кожному місці у полі. Наприклад, якщо основна ділянка 150 була засіяна як проілюстровано на Фігурі 8, комп'ютер 450 ранжував би кожну норму щільності посіву насіння відповідно до отриманої врожайності. Аналогічний аналіз переважно виконується, коли набір паралельних ділянок було розміщено як проілюстровано на Фігурі 7. На етапі 353, комп'ютер 450 переважно визначає середню врожайність для всіх місць розташування у полі за кожною нормою щільності посіву насіння. Таким чином, середня врожайність визначається для кожного набору ділянок, на яких дана норма щільності посіву насіння для ділянки була засіяна, а також для первинної норми щільності посіву насіння. На етапі 354, комп'ютер 450 переважно ранжує норми щільності посіву насіння відповідно до їх середньої врожайності по всьому полю. На етапі 355, комп'ютер 450 переважно отримує норми щільності посіву насіння і результати врожайності для однакового типу ґрунту з різних полів, завантажені з різних комп'ютерів 450-1 (дивіться обговорення відносно системи 400 за Фігурою 3), і визначає середню врожайність для кожної норми щільності посіву насіння на декількох полях. На етапі 356, комп'ютер 450 переважно ранжує норми щільності посіву насіння за середньою врожайністю для кожного поля, для якого були отримані дані на етапі 355. У деяких реалізаціях, порівняння між показниками врожайності, отриманими за різними нормами щільності посіву насіння, проводяться між сезонами. Наприклад, врожайність, отримана при заданій нормі щільності посіву насіння для певного поля, переважно усереднюється із показниками врожайності для тієї ж норми щільності посіву насіння і того самого поля за попередні роки перед їх порівнянням з іншими нормами щільності посіву насіння. 6 UA 115124 C2 5 10 15 20 Повертаючись до Фігури 13, на етапі 360 комп'ютер 450 генерує рекомендацію нового припису на основі аналізу врожайності, виконаного на етапі 350. Наприклад, нова первинна норма щільності посіву насіння може бути рекомендована на основі ранжованої на першому місці норми щільності посіву насіння для усього поля. Крім того, норма щільності посіву насіння, яка змінюються залежно від місця розташування, може бути рекомендована, коли різні норми щільності посіву насіння були ранжовані на першому місці на різних ділянках поля. Хоча системи і способи, описані тут, проілюстровані та описані по відношенню до норми посіву насіння, в інших варіантах ті ж системи і способи можуть бути застосовані до внесення інших речовин під сільськогосподарські культури, внесення яких здійснюється за допомогою регульованого обладнання для внесення, іншого ніж сівалки. Наприклад, у деяких варіантах норма, з якою вноситься рідке добриво з використанням системи регулювання норми внесення, змінюється, і отримані показники врожайності визначаються після збору врожаю за допомогою способів, представлених у даному описі. В інших варіантах, система для посіву різних сортів насіння під час сівби (наприклад, такі системи, як описані у патентах U.S. № 5.915.313 і 7.418.908, які включені тут у повному обсязі шляхом посилання) може використовуватися для засівання ділянок із різними сортами з використанням способів, представлених у цьому описі. Вищенаведений опис представлено для того, щоб дозволити будь-якому середньому фахівцеві в даній галузі техніки втілити і використовувати даний винахід, і надається в контексті патентної заявки та її вимог. Різні модифікації переважного варіанту реалізації пристрою, і загальні принципи та ознаки системи і способів, описаних тут, будуть очевидно вираженими для фахівців в даній галузі техніки. Таким чином, даний винахід не обмежується варіантами пристрою, системи і способів, описаними вище і проілюстрованими на фігурах, але має відповідати найширшому обсягу відповідно до сутності та обсягу пунктів формули винаходу, що додається. 25 ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 55 60 1. Спосіб генерування карти-припису щільності посіву насіння, який включає в себе множинні зони базової норми і множинні ділянки в рамках кожної зони базової норми, причому кожна з множинних ділянок містить норми щільності, які відрізняються від оточуючої зони базової норми, при цьому згаданий спосіб включає в себе: ідентифікацію контуру поля; ідентифікацію множинних зон базової норми в межах контуру згаданого поля; призначення базової норми щільності для кожної зони базової норми; ідентифікацію придатних зон розміщення ділянки в межах кожної зони базової норми на основі правила першого розміщення, причому кожна зона розміщення ділянки містить площу в межах зони базової норми, в якій одна або більше ділянок можуть розміщуватися; визначення розмірів ділянки на основі перших вхідних даних користувача; і визначення місця розташування ділянки в межах згаданих придатних зон розміщення ділянки на основі других вхідних даних користувача і правила другого розміщення. 2. Спосіб за п. 1, в якому згадане правило першого розміщення вимагає мінімальної відстані між контурами зон базової норми і ділянок. 3. Спосіб за п. 1, в якому згадані перші вхідні дані користувача містять ширину або кількість рядів жниварки комбайна, що підлягає використанню при збиранні урожаю з поля, засіяного відповідно до згаданої карти-припису. 4. Спосіб за п. 1, в якому другі вхідні дані користувача містять співвідношення між площею групи ділянок і площею зони, що прилягає до групи ділянок. 5. Спосіб за п. 1, в якому згадане правило другого розміщення вимагає мінімальної кількості ділянок базової норми сусідніх суміжних з кожною ділянкою, причому згадані ділянки базової норми мають мінімальну площу. 6. Спосіб за п. 1, що додатково включає в себе: визначення норми щільності в межах кожної ділянки на основі третіх вхідних даних користувача. 7. Спосіб за п. 6, причому згадані треті вхідні дані користувача включають в себе коливання в нормах щільності. 8. Спосіб за п. 6, що додатково включає в себе: запит користувача прийняти або відхилити місця розташування ділянки; і зміну згаданого місця розташування ділянки на основі відхилення користувачем. 9. Спосіб генерування поля, яке включає в себе множинні зони базової норми і множинні ділянки в межах кожної зони базової норми, причому кожна з множинних ділянок містить норми щільності, які відрізняються від оточуючої зони базової норми, при цьому згаданий спосіб включає: 7 UA 115124 C2 5 10 15 20 (a) генерування карти-припису згідно з наступними етапами: (і) ідентифікація контуру поля; (іі) ідентифікація множинних зон базової норми в межах контуру згаданого поля; (ііі) призначення базової норми щільності для кожної зони базової норми; (iv) ідентифікація придатних зон розміщення ділянки в межах кожної зони базової норми на основі правила першого розміщення, причому кожна зона розміщення ділянки містить площу в межах зони базової норми, в якій одна або більше ділянок можуть розміщуватися; (v) визначення розмірів ділянки на основі перших вхідних даних користувача; (vi) визначення місць розташування ділянки в межах згаданих придатних зон розміщення ділянки на основі других вхідних даних користувача і правила другого розміщення; і (vii) визначення норм щільності посіву насіння в межах кожної ділянки на основі третіх вхідних даних користувача; (b) контроль норми щільності посіву насіння сівалки відповідно до згаданої карти-припису, і (c) відображення місця розташування принаймні однієї з ділянок на полі під час збирання врожаю на полі. 10. Спосіб за п. 9, що додатково включає в себе: (d) попередження користувача про необхідність налаштування жниварки комбайна по відношенню до принаймні однієї з ділянок, під час збирання урожаю на полі. 11. Спосіб за п. 9, який додатково включає в себе: (е) запис показника врожайності в кожному місці розташування на полі під час збирання урожаю на полі; і (f) порівняння показника врожайності в межах щонайменше однієї із зон базової норми в межах щонайменше однієї з ділянок. 8 UA 115124 C2 9 UA 115124 C2 10 UA 115124 C2 11 UA 115124 C2 12 UA 115124 C2 13 UA 115124 C2 14 UA 115124 C2 15 UA 115124 C2 16 UA 115124 C2 17 UA 115124 C2 18 UA 115124 C2 19 UA 115124 C2 20 UA 115124 C2 Комп’ютерна верстка В. Мацело Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 21
ДивитисяДодаткова інформація
Назва патенту англійськоюSystems and methods for creating prescription maps and plots
Автори англійськоюSauder, Timothy, A., Koch, Justin, L.
Автори російськоюСаудер Тимоти Э., Кох Джастин Л.
МПК / Мітки
МПК: G01C 21/34
Мітки: способи, створення, ділянок, системі, карт-приписів
Код посилання
<a href="https://ua.patents.su/23-115124-sistemi-i-sposobi-stvorennya-kart-pripisiv-i-dilyanok.html" target="_blank" rel="follow" title="База патентів України">Системи і способи створення карт-приписів і ділянок</a>
Комплекти рупорного хвилеводу, способи їх створення та антенні системи
Номер патенту: 112208
Опубліковано: 10.08.2016
Автори: Зіран Жао, Бін Санг, Жіціанг Чен, Юаньцзинг Лі, Ванлонг Ву, Венгуо Ліу, Ксілей Луо, Джіецінг Янг, Лей Женг
МПК: H01Q 13/02, H01Q 21/06, H01Q 9/04
Мітки: способи, створення, хвилеводу, антенні, системі, рупорного, комплекті
Формула / Реферат:
1. Антенна система, яка містить:антенну решітку, яка включає:діелектричну підкладку прямокутної форми,множину випромінювальних патчів, розташованих з інтервалами по довжині діелектричної підкладки й утворених на верхній поверхні діелектричної підкладки,множину з'єднувальних патчів, розташованих відповідно до множини випромінювальних патчів, кожен з яких є утвореним на верхній поверхні діелектричної підкладки й...
Спосіб створення ґрунтових карт
Номер патенту: 12599
Опубліковано: 15.02.2006
Автори: Трускавецький Станіслав Романович, Чичоткіна Олександра Анатоліївна, Гічка Максим Миколайович, Биндич Тетяна Юріївна
МПК: G01N 33/24, G03B 37/00, G01V 8/00
Мітки: створення, ґрунтових, спосіб, карт
Формула / Реферат:
Спосіб створення ґрунтових карт, що включає космічну багатозональну зйомку у видимій та ближній інфрачервоній частині спектру, обробку одержаних результатів методом кластерного аналізу та наземні дослідження, який відрізняється тим, що на базі кластерного аналізу з використанням геоінформаційних систем складають карту яскравості ґрунтових ареалів, які прив'язують до системи географічних координат з використанням приладів глобального...
Спосіб побудови сімейств ліній рівня для створення геоморфологічних карт
Номер патенту: 59996
Опубліковано: 10.06.2011
Автори: Кузьмінов Віталій Вікторович, Караєв Олександр Гнатович
МПК: G09B 29/00
Мітки: геоморфологічних, сімейств, побудови, створення, рівня, ліній, спосіб, карт
Формула / Реферат:
1. Спосіб побудови сімейств ліній рівня для створення геоморфологічних карт, що будуються за даними про аплікати у вузлах прямокутної сітки на поверхні ґрунту ділянки сільськогосподарського призначення, який відрізняється тим, що будують сімейство ліній рівня із заданою щільністю.2. Спосіб побудови сімейств ліній рівня для створення геоморфологічних карт за п. 1, який відрізняється тим, що вибір аплікат у процесі побудови сімейства...
Пристрій, системи та способи подачі насіння
Номер патенту: 114300
Опубліковано: 25.05.2017
Автори: Ходел Джеремі Дж., Радтке Іан Р.
МПК: A01C 7/16
Мітки: насіння, пристрій, системі, подачі, способи
Формула / Реферат:
1. Пристрій подачі насіння для внесення насіння на посівну поверхню, який включає в себе:дозатор насіння, виконаний з можливістю захоплення і вивільнення насіння з висівного диска у місці для випуску насіння;зерновий конвеєр, розміщений для прийому насіння після вивільнення насіння із зазначеного висівного диска на верхньому кінці зазначеного зернового конвеєра, при цьому зазначений зерновий конвеєр включає в себе стрічку,...
Пристрій, системи і способи регулювання притискної сили рядного висівного апарата

Номер патенту: 110988
Опубліковано: 10.03.2016
Автори: Саудер Дерек Е., Радтке Іан Р., Столлер Джейсон Дж.
МПК: A01B 63/111, A01B 63/114, A01C 5/06, A01B 13/08, A01C 7/18
Мітки: пристрій, способи, висівного, регулювання, сили, системі, притискної, рядного, апарата
Формула / Реферат:
1. Система для застосування притискної сили до сільськогосподарського начіпного знаряддя, яке має багаторядні висівні апарати, що включає в себе:перший привід, при цьому зазначений перший привід призначений для застосування сили до першого рядного висівного апарата, при цьому зазначений перший привід включає в себе першу притискну камеру і першу підйомну камеру, при цьому тиск у зазначеній першій притискній камері має тенденцію...
Попередній патент: Система та спосіб керування рамою для навішування змінних робочих органів сільськогосподарських інструментів
Наступний патент: Синергічна гербіцидна комбінація, що містить темботріон
Випадковий патент: Спосіб здійснення персонального сеансу зв'язку між користувачами мережі телекомунікацій