Система та спосіб для керування і моніторингу багаторядного сільськогосподарського знаряддя
Номер патенту: 113660
Опубліковано: 27.02.2017
Автори: Саудер Тім, Ходел Джеремі, Саудер Дерек, Столлер Джейсон, Борер Філ












Формула / Реферат
1. Система моніторингу для сільськогосподарського знаряддя з множиною висівних секцій, яка містить:
дозатор насіння;
висівний транспортер, який має передню сторону і задню сторону, при цьому вказаний висівний транспортер виконаний з можливістю приймання насіння з вказаного дозатора насіння і містить стрічку, яка має множину пластин, виконаних з можливістю переміщення вказаного насіння, при цьому вказаний висівний транспортер виконаний з можливістю направлення вказаного насіння вниз по вказаній передній стороні вказаного висівного транспортера до нижнього кінця вказаного висівного транспортера і вивільнення вказаного насіння з вказаного нижнього кінця, причому вказані пластини підіймаються по вказаній задній стороні без вказаного насіння;
перший датчик насіння, встановлений на вказаній передній стороні вказаного транспортера і виконаний з можливістю визначення присутності насіння і пластин, що опускаються по вказаній передній стороні вказаного висівного транспортера;
двигун, виконаний з можливістю приведення в дію вказаного висівного транспортера;
датчик швидкості, виконаний з можливістю вимірювання швидкості руху висівної секції, зв'язаної з вказаним висівним транспортером;
другий датчик насіння, встановлений на вказаній задній стороні вказаного висівного транспортера і виконаний з можливістю визначення присутності пластин, що підіймаються по вказаній задній стороні вказаного висівного транспортера; і
контролюючий пристрій, який містить процесор, при цьому вказаний контролюючий пристрій знаходиться в інформаційному сполученні з вказаним двигуном, вказаним датчиком швидкості, вказаним першим датчиком насіння і вказаним другим датчиком насіння, причому вказаний контролюючий пристрій визначає необхідне число обертів двигуна для збігу швидкості вивільнення насіння з вказаною швидкістю руху, і при цьому вказаний контролюючий пристрій подає вказаному двигуну команду зміни фактичного числа обертів вказаного двигуна до вказаного необхідного числа обертів двигуна.
2. Система моніторингу за п. 1, в якій вказаний перший датчик насіння являє собою оптичний датчик, і вказаний другий датчик насіння являє собою оптичний датчик.
3. Система моніторингу за п. 1, в якій вказаний контролюючий пристрій виконаний з можливістю реєстрації першого сигналу, що генерується вказаним першим датчиком насіння, і другого сигналу, що генерується вказаним другим датчиком насіння.
4. Система моніторингу за п. 3, в якій вказаний контролюючий пристрій виконаний з можливістю генерування скоректованого сигналу на основі вказаного першого сигналу і вказаного другого сигналу.
5. Система моніторингу за п. 3, в якій вказаний контролюючий пристрій виконаний з можливістю віднімання від амплітуди частини першого сигналу вказаного першого сигналу на основі амплітуди частини другого сигналу вказаного другого сигналу, при цьому вказаний контролюючий пристрій виконаний з можливістю накладення часового зсуву на вказаний другий сигнал.
6. Система моніторингу за п. 3, в якій вказаний перший сигнал містить частину імпульсу насіння і частину імпульсу пластини, при цьому вказаний контролюючий пристрій виконаний з можливістю проведення відмінності між вказаною частиною імпульсу насіння і вказаною частиною імпульсу пластини за допомогою порівняння вказаного першого сигналу з вказаним другим сигналом.
7. Система моніторингу за п. 6, в якій вказаний контролюючий пристрій виконаний з можливістю ідентифікації вказаної частини імпульсу насіння на основі синхронізації імпульсу пластини у вказаному другому сигналі.
8. Спосіб моніторингу сільськогосподарського знаряддя, який включає:
приймання насіння у верхню частину висівного транспортера, що містить стрічку з множиною пластин;
переміщення насіння між вказаними пластинами з верхньої частини вказаного висівного транспортера в нижню частину вказаного висівного транспортера;
вивільнення насіння з вказаної нижньої частини вказаного висівного транспортера;
при цьому перший датчик визначає проходження як вказаним насінням, так і вказаними пластинами першого місцеположення в міру того, як вказане насіння і вказані пластини проходять з вказаної верхньої частини вказаного висівного транспортера до вказаної нижньої частини вказаного висівного транспортера, причому вказаний перший датчик встановлений в першій частині вказаного висівного транспортера, а вказані пластини проходять через вказану першу частину по суті в напрямку вниз і переміщують насіння по суті в напрямку вниз через вказану першу частину; і
при цьому другий датчик визначає проходження вказаними пластинами другого місцеположення в міру того, як вказані пластини проходять з вказаної нижньої частини вказаного висівного транспортера до вказаної верхньої частини вказаного висівного транспортера після того, як вказане насіння вивільняється з вказаних пластин, причому вказаний другий датчик встановлений у другій частині вказаного висівного транспортера, при цьому вказані пластини проходять через вказану другу частину по суті в напрямку вгору і не переміщують насіння через вказану другу частину.
9. Спосіб за п. 8, який додатково включає:
проведення відмінності між насінням і пластинами у вказаному першому місцеположенні на основі часу, в який пластини визначаються у вказаному другому місцеположенні.
10. Спосіб за п. 9, в якому стадію проведення відмінності між насінням і пластинами виконують за допомогою:
генерування вихідного сигналу насіння, що свідчить про проходження насіння і пластин мимо вказаного першого місцеположення;
генерування сигналу пластин, що свідчить про проходження пластин мимо вказаного другого місцеположення; і
ідентифікації імпульсу насіння у вказаному вихідному сигналі насіння на основі вказаного сигналу пластин.
11. Спосіб за п. 10, в якому стадію ідентифікації імпульсу насіння у вказаному вихідному сигналі насіння на основі вказаного сигналу пластин виконують за допомогою:
накладення часового зсуву на один з вказаного сигналу пластин і вказаного вихідного сигналу насіння;
ідентифікації частин проходження пластин вказаного вихідного сигналу насіння за допомогою порівняння вказаного сигналу пластин з вказаним вихідним сигналом насіння; і
ідентифікації частин проходження насіння вказаного вихідного сигналу насіння за допомогою порівняння частин, відмінних від вказаних частин проходження пластин, з пороговим значенням події насіння.
12. Спосіб за п. 11, в якому вказаний часовий зсув співвіднесений з часом між імпульсом у вказаному вихідному сигналі насіння і безпосередньо подальшим імпульсом у вказаному сигналі пластини.
13. Спосіб за п. 9, який додатково включає:
накладення зміни швидкості на робочу швидкість вказаного висівного транспортера.
14. Спосіб за п. 13, який додатково включає:
визначення швидкості руху вказаного висівного транспортера, при цьому вказана зміна швидкості основана на вказаній швидкості руху.
15. Спосіб за п. 14, в якому вказаною швидкістю руху є конкретна швидкість висівної секції.
Текст
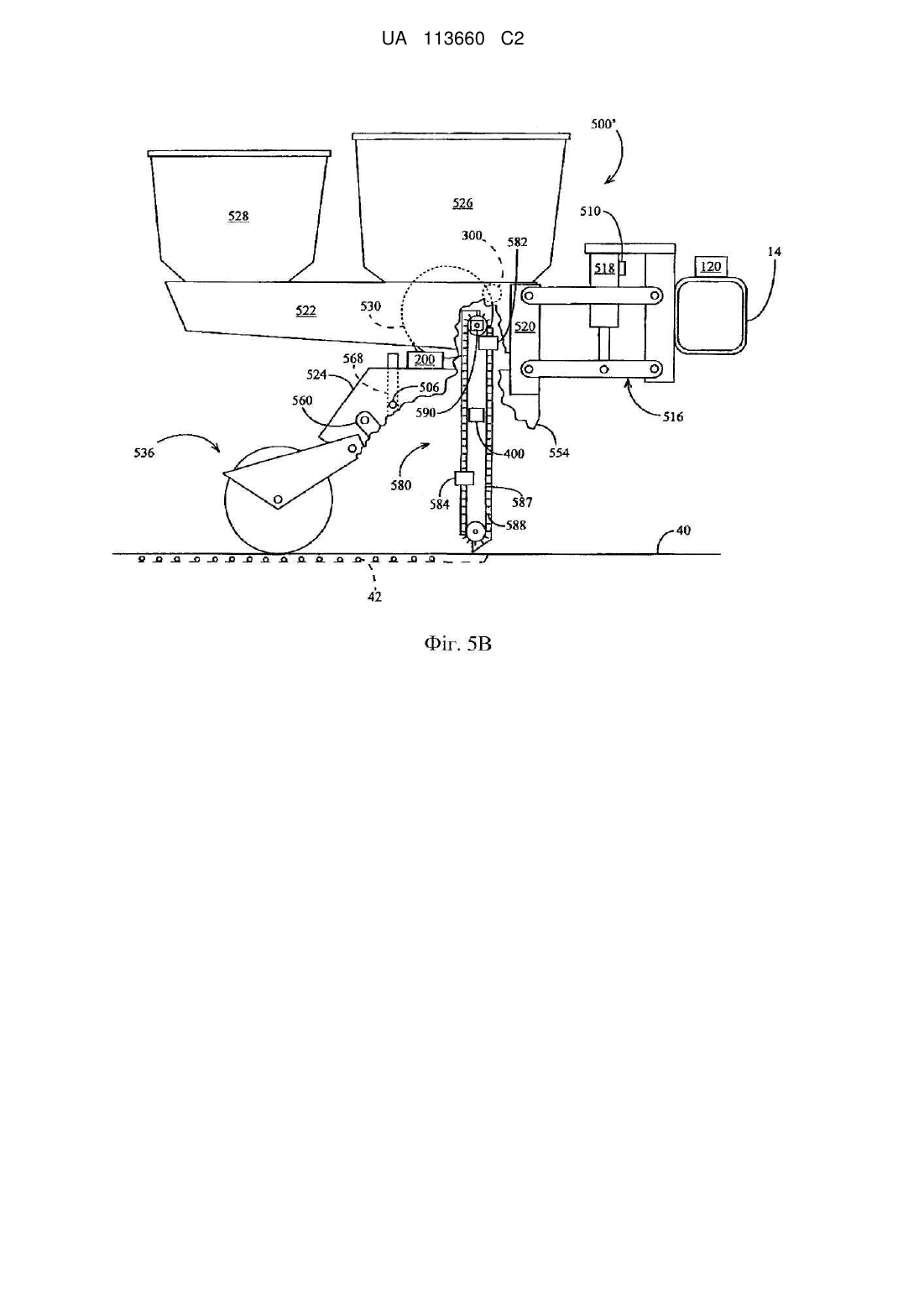
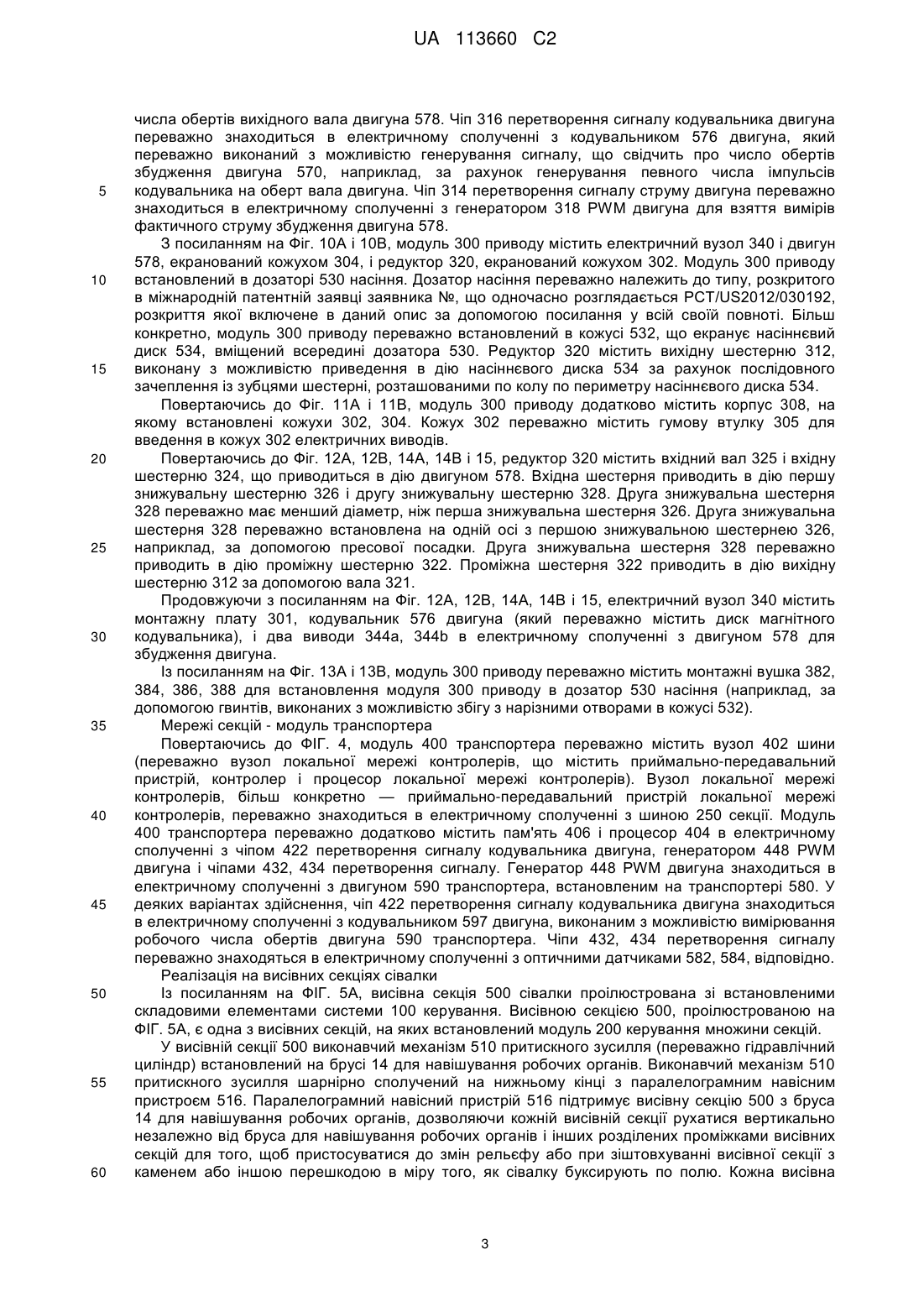
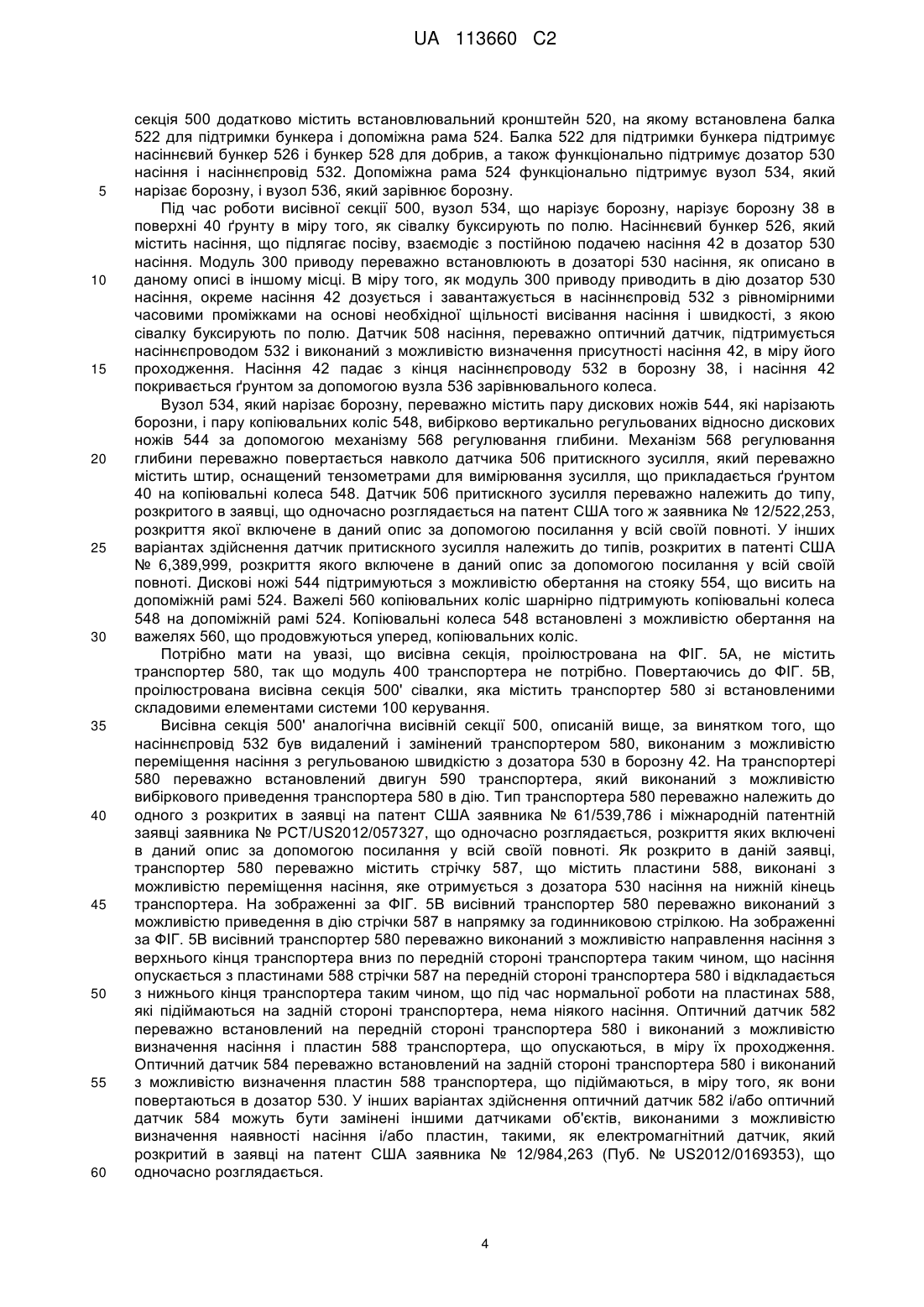
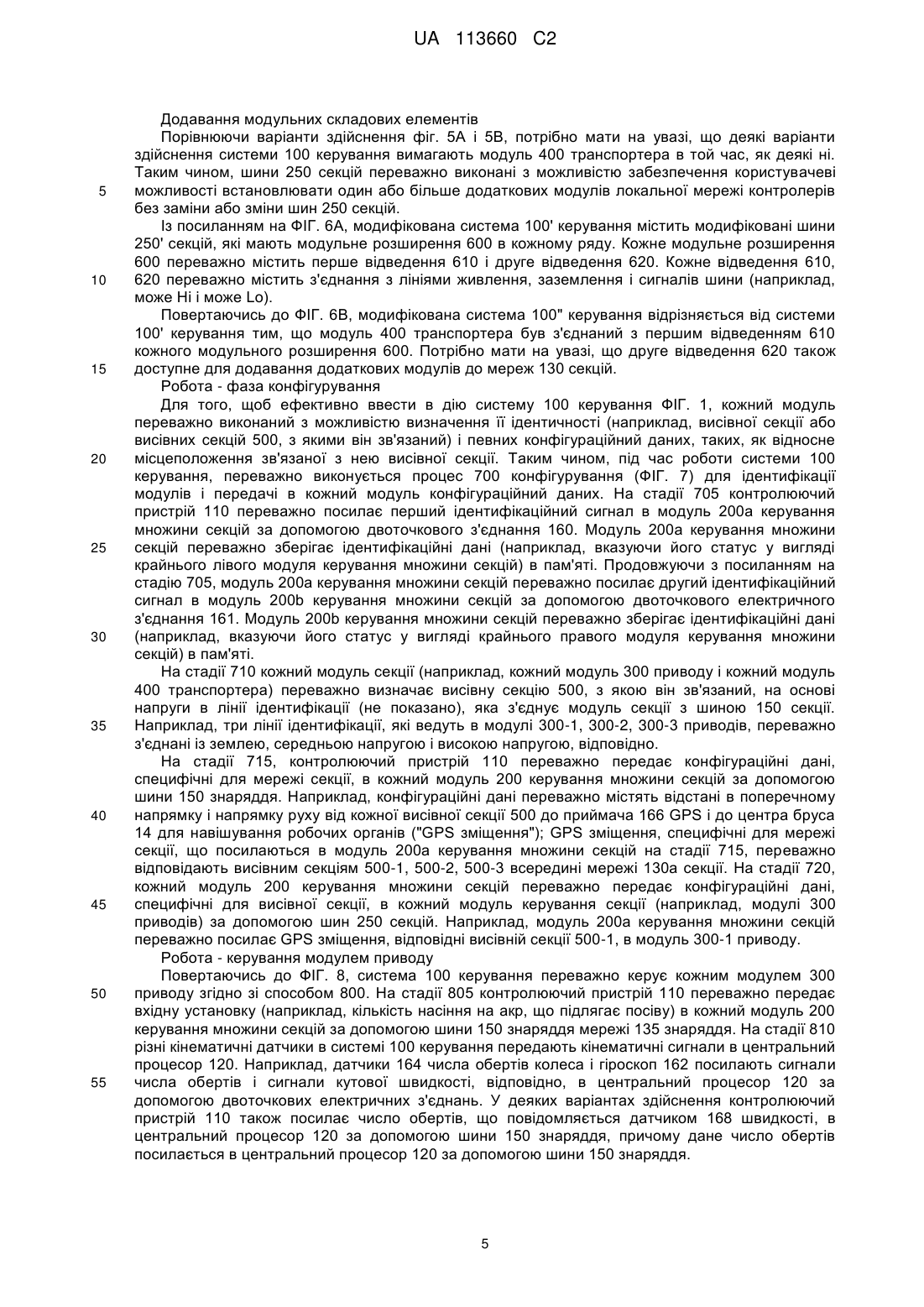
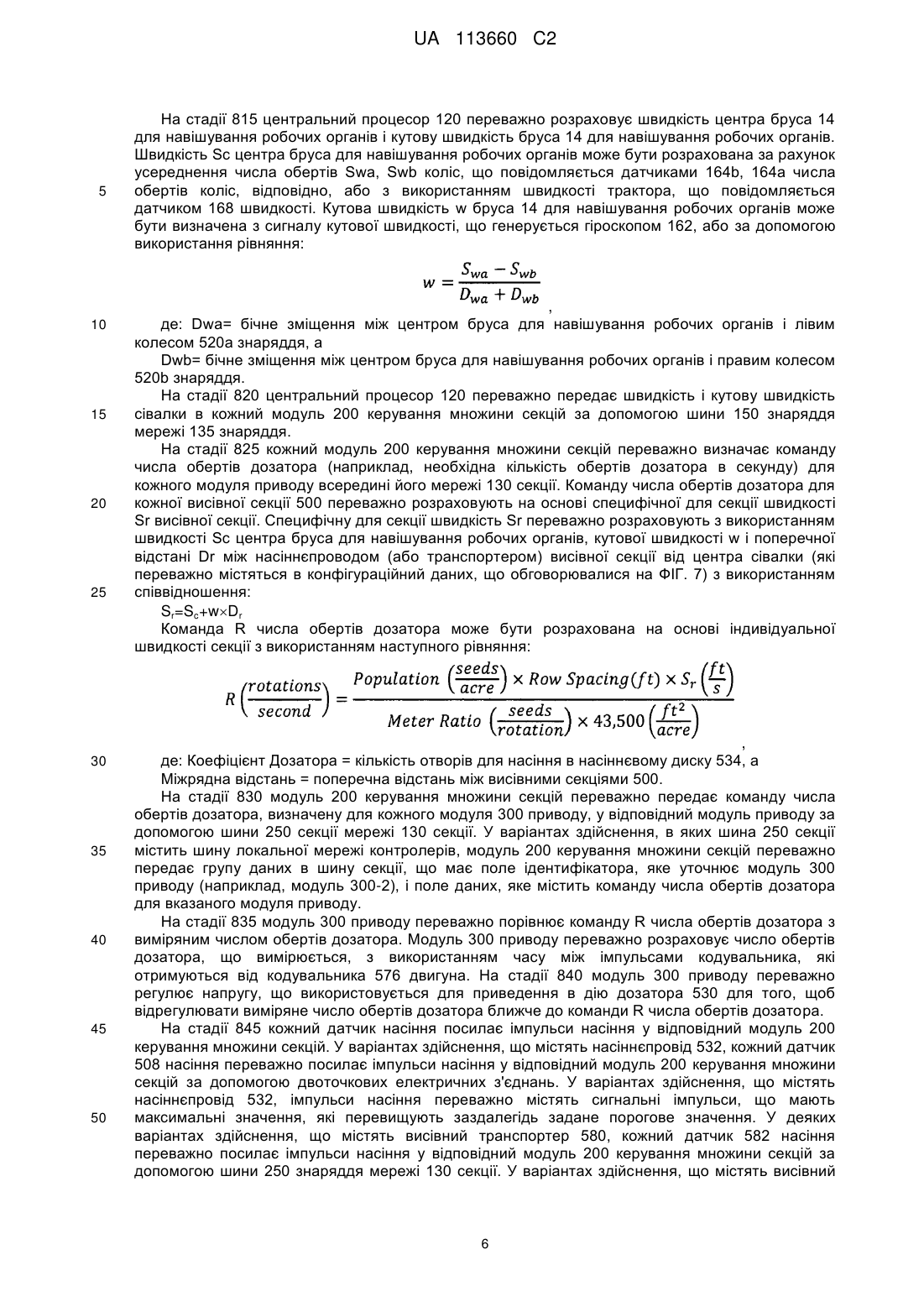
Реферат: Запропоновані система та спосіб для моніторингу і регулювання багаторядного сільськогосподарського знаряддя з множиною висівних секцій, для ефективного визначення насіння, переміщуваного висівним транспортером. UA 113660 C2 (12) UA 113660 C2 UA 113660 C2 5 10 15 20 25 30 35 40 45 50 55 60 Рівень техніки Оскільки виробники в останні роки все ширше впроваджують додаткові датчики і контролери на сільськогосподарських знаряддях, таких, як сівалки для просапних культур, системи керування і моніторингу для подібних знарядь стають все більш складними. Встановлення і технічне обслуговування подібних систем стають все більш важкими. Таким чином, в даній галузі існує потреба в ефективному керуванні і моніторингу подібних систем. У посівних знаряддях, що містять висівні транспортери, виникають особливі проблеми керування і моніторингу; таким чином, існує також окрема необхідність в ефективному підрахунку насіння і ефективному вбудовуванні висівного транспортера в систему керування і моніторингу знаряддя. Короткий опис креслень ФІГ. 1 схематично ілюструє варіант здійснення електричної системи керування для регулювання і моніторингу сільськогосподарського знаряддя з множиною секцій. ФІГ. 2 схематично ілюструє варіант здійснення модуля керування множини секцій. ФІГ. 3 схематично ілюструє варіант здійснення модуля приводу. ФІГ. 4 схематично ілюструє варіант здійснення модуля транспортера. ФІГ. 5A являє собою вертикальний вигляд збоку висівної секції сівалки, що містить насіннєпровід і з вбудованим варіантом здійснення електронної системи керування. ФІГ. 5B являє собою вертикальний вигляд збоку висівної секції сівалки, що містить висівний транспортер і з вбудованим ще одним варіантом здійснення електронної системи керування. ФІГ. 6A схематично ілюструє ще один варіант здійснення електричної системи керування, що містить модульне розширення в кожному ряду. ФІГ. 6B схематично ілюструє електричну систему керування ФІГ. 6A з модулем транспортера, встановленим в кожному ряду. ФІГ. 7 ілюструє варіант здійснення способу передачі ідентифікаційних і конфігураційний даних в модуль керування множини секцій і в модуль керування секції. ФІГ. 8 ілюструє варіант здійснення способу керування модулем приводу. ФІГ. 9 ілюструє варіант здійснення способу керування модулем транспортера. ФІГ. 10A являє собою вигляд в перспективі варіанта здійснення дозатора насіння з вбудованим варіантом здійснення модуля приводу. ФІГ. 10B являє собою вигляд у перспективі дозатора насіння і модуля приводу фіг. 10A з декількома кожухами, видаленими для ясності. ФІГ. 11A являє собою вигляд знизу модуля приводу за ФІГ. 10A. ФІГ. 11B являє собою вертикальний вигляд збоку модуля приводу за ФІГ. 10A. ФІГ. 12A являє собою вигляд знизу модуля приводу за ФІГ. 10A з двома кожухами і корпусом, видаленими для ясності. ФІГ. 12B являє собою вертикальний вигляд збоку модуля приводу за ФІГ. 10A з двома кожухами і корпусом, видаленими для ясності. ФІГ. 13A являє собою вигляд спереду модуля приводу за ФІГ. 10A. ФІГ. 13B являє собою вигляд позаду модуля приводу за ФІГ. 10A. ФІГ. 14A являє собою вигляд спереду модуля приводу за ФІГ. 10A з двома кожухами і корпусом, видаленими для ясності. ФІГ. 14B являє собою вигляд позаду модуля приводу за ФІГ. 10A з двома кожухами і корпусом, видаленими для ясності. ФІГ. 15 являє собою вигляд в перспективі модуля приводу за ФІГ. 10A з двома кожухами і корпусом, видаленими для ясності. ФІГ. 16 схематично ілюструє ще один варіант здійснення електричної системи керування для регулювання і моніторингу сільськогосподарського знаряддя з множиною секцій. ФІГ. 17 ілюструє варіант здійснення способу підрахунку насіння з використанням двох оптичних датчиків, які взаємодіють з висівним транспортером. ФІГ. 18 ілюструє наведені для прикладу сигнали, що генеруються оптичними датчиками, які взаємодіють з висівним транспортером. ФІГ. 19 ілюструє варіант здійснення однорядної мережі. Докладний опис винаходу Далі з посиланням на креслення, на яких однакові посилальні позиції означають ідентичні або відповідні деталі протягом декількох зображень, ФІГ. 1 схематично ілюструє сільськогосподарське знаряддя, наприклад, сівалку, яка містить брус 14 для навішування робочих органів, що функціонально підтримує шість висівних секцій 500. Брус 14 для навішування робочих органів підтримується лівим і правим колесами 520a, 520b знаряддя і буксирується трактором 5. Система 100 керування містить контролюючий пристрій 110, переважно встановлений в тракторі 5, мережу 135 знаряддя і дві мережі 130a, 130b секцій. 1 UA 113660 C2 5 10 15 20 25 30 35 40 45 50 55 60 Контролюючий пристрій 110 переважно містить графічний інтерфейс ("GUI") користувача 112, пам'ять 114, центральний процесорний блок ("CPU") 116 і вузол 118 шини. Вузол 118 шини переважно містить вузол локальної мережі контролерів ("CAN"), що містить приймальнопередавальний пристрій, контролер і процесор локальної мережі контролерів. Контролюючий пристрій 110 переважно знаходиться в електричному сполученні з датчиком 168 швидкості (наприклад, радарним датчиком швидкості, встановленим на тракторі 5) і приймачем 166 глобальної системи позиціонування ("GPS"), встановленим на тракторі 5 (або в деяких варіантах здійснення — на брусі 14 для навішування робочих органів). Мережа 135 знаряддя переважно містить шину 150 знаряддя і центральний процесор 120. Центральний процесор 120 переважно встановлюють на брус 14 для навішування робочих органів. Кожною шиною, описаною в даному описі, переважно є шина локальної мережі контролерів, вміщена всередині джгута, який з'єднує кожний модуль на шині з лініями живлення, заземлення і сигналів шини (наприклад, CAN-Hi і CAN-Lo). Центральний процесор 120 переважно містить пам'ять 124, CPU 126 і вузол 128 шини (переважно вузол локальної мережі контролерів, що містить приймально-передавальний пристрій, контролер і процесор локальної мережі контролерів). Шина 150 знаряддя переважно містить шину локальної мережі контролерів. Контролюючий пристрій 110 переважно знаходиться в електричному сполученні з шиною 150 знаряддя. Центральний процесор 120 переважно знаходиться в електричному сполученні з датчиками 164b, 164a числа обертів коліс (наприклад, датчиками числа обертів на ефекті Холла), встановленими на лівому і правому колесах 520a, 520b знаряддя, відповідно. Центральний процесор 120 переважно знаходиться в електричному сполученні з гіроскопом 162, встановленим на брусі 14 для навішування робочих органів. Мережі секцій - огляд Кожна мережа 130 секцій переважно містить модуль 200 керування множини секцій, встановлений на одній з висівних секцій 500, шину 250 секції, три модулі 300 приводів, окремо встановлених на трьох висівних секціях 500, і три модулі 400 транспортерів, окремо встановлених на трьох висівних секціях 500, відповідно. У даному описі кожна висівна секція 500, що має щонайменше модуль 300 приводу в окремій мережі 130 висівної секції, описана "всередині" даної мережі секції. Мережі секцій - модуль керування множини секцій Повертаючись до ФІГ. 2, модуль 200 керування множини секцій переважно містить вузол 202 шини (переважно вузол локальної мережі контролерів, який містить приймальнопередавальний пристрій, контролер і процесор локальної мережі контролерів). Вузол локальної мережі контролерів, більш конкретно — приймально-передавальний пристрій локальної мережі контролерів, переважно знаходиться в електричному сполученні з шиною 250 секції і шиною 150 знаряддя. Модуль 200 керування множини секцій додатково містить пам'ять 214 і процесор 204 в електричному сполученні з чіпом 206 перетворення сигналу притискного зусилля, допоміжним входом 208 датчика насіння, генератором 210 широтно-імпульсної модуляції ("PWM") електромагніта притискного зусилля і загальними допоміжними входами 212. Допоміжні входи 212 переважно сконфігуровані для електричної взаємодії з датчиками, включаючи датчик тиску і перемикач підняття. Чіп 206 перетворення сигналу притискного зусилля переважно знаходиться в електричному сполученні з датчиком 506 притискного зусилля на кожній висівній секції 500 всередині мережі 135 знаряддя. Генератор 210 PWM електромагніта притискного зусилля переважно знаходиться в електричному сполученні з електромагнітом 510 притискного зусилля на кожній висівній секції всередині мережі 130 секції. У варіантах здійснення, що містять насіннєпровід (описаних більш детально в даному описі в зв'язку з ФІГ. 5A), допоміжний вхід 208 датчика насіння переважно знаходиться в електричному сполученні з датчиком 508 насіння (наприклад, оптичним датчиком) на кожній висівній секції 500 всередині мережі 130 секції. Мережі секцій - модуль приводу Повертаючись до ФІГ. 3, модуль 300 приводу переважно містить монтажну плату 301, кодувальник 576 двигуна і двигун 578 приводу дозатора. Монтажна плата 301 переважно містить вузол 302 шини (переважно вузол локальної мережі контролерів, що містить приймально-передавальний пристрій, контролер і процесор локальної мережі контролерів). Вузол локальної мережі контролерів, більш конкретно — приймально-передавальний пристрій локальної мережі контролерів, переважно знаходиться в електричному сполученні з шиною 250 секції. Модуль 300 приводу переважно додатково містить пам'ять 306 і процесор 304 в електричному сполученні з чіпом 316 перетворення сигналу кодувальника двигуна, генератором 318 PWM двигуна і чіпом 314 перетворення сигналу струму двигуна. Генератор 318 PWM двигуна переважно знаходиться в електричному сполученні з двигуном 578 для регулювання 2 UA 113660 C2 5 10 15 20 25 30 35 40 45 50 55 60 числа обертів вихідного вала двигуна 578. Чіп 316 перетворення сигналу кодувальника двигуна переважно знаходиться в електричному сполученні з кодувальником 576 двигуна, який переважно виконаний з можливістю генерування сигналу, що свідчить про число обертів збудження двигуна 570, наприклад, за рахунок генерування певного числа імпульсів кодувальника на оберт вала двигуна. Чіп 314 перетворення сигналу струму двигуна переважно знаходиться в електричному сполученні з генератором 318 PWM двигуна для взяття вимірів фактичного струму збудження двигуна 578. З посиланням на Фіг. 10A і 10B, модуль 300 приводу містить електричний вузол 340 і двигун 578, екранований кожухом 304, і редуктор 320, екранований кожухом 302. Модуль 300 приводу встановлений в дозаторі 530 насіння. Дозатор насіння переважно належить до типу, розкритого в міжнародній патентній заявці заявника №, що одночасно розглядається PCT/US2012/030192, розкриття якої включене в даний опис за допомогою посилання у всій своїй повноті. Більш конкретно, модуль 300 приводу переважно встановлений в кожусі 532, що екранує насіннєвий диск 534, вміщений всередині дозатора 530. Редуктор 320 містить вихідну шестерню 312, виконану з можливістю приведення в дію насіннєвого диска 534 за рахунок послідовного зачеплення із зубцями шестерні, розташованими по колу по периметру насіннєвого диска 534. Повертаючись до Фіг. 11A і 11B, модуль 300 приводу додатково містить корпус 308, на якому встановлені кожухи 302, 304. Кожух 302 переважно містить гумову втулку 305 для введення в кожух 302 електричних виводів. Повертаючись до Фіг. 12A, 12B, 14A, 14B і 15, редуктор 320 містить вхідний вал 325 і вхідну шестерню 324, що приводиться в дію двигуном 578. Вхідна шестерня приводить в дію першу знижувальну шестерню 326 і другу знижувальну шестерню 328. Друга знижувальна шестерня 328 переважно має менший діаметр, ніж перша знижувальна шестерня 326. Друга знижувальна шестерня 328 переважно встановлена на одній осі з першою знижувальною шестернею 326, наприклад, за допомогою пресової посадки. Друга знижувальна шестерня 328 переважно приводить в дію проміжну шестерню 322. Проміжна шестерня 322 приводить в дію вихідну шестерню 312 за допомогою вала 321. Продовжуючи з посиланням на Фіг. 12A, 12B, 14A, 14B і 15, електричний вузол 340 містить монтажну плату 301, кодувальник 576 двигуна (який переважно містить диск магнітного кодувальника), і два виводи 344a, 344b в електричному сполученні з двигуном 578 для збудження двигуна. Із посиланням на Фіг. 13A і 13B, модуль 300 приводу переважно містить монтажні вушка 382, 384, 386, 388 для встановлення модуля 300 приводу в дозатор 530 насіння (наприклад, за допомогою гвинтів, виконаних з можливістю збігу з нарізними отворами в кожусі 532). Мережі секцій - модуль транспортера Повертаючись до ФІГ. 4, модуль 400 транспортера переважно містить вузол 402 шини (переважно вузол локальної мережі контролерів, що містить приймально-передавальний пристрій, контролер і процесор локальної мережі контролерів). Вузол локальної мережі контролерів, більш конкретно — приймально-передавальний пристрій локальної мережі контролерів, переважно знаходиться в електричному сполученні з шиною 250 секції. Модуль 400 транспортера переважно додатково містить пам'ять 406 і процесор 404 в електричному сполученні з чіпом 422 перетворення сигналу кодувальника двигуна, генератором 448 PWM двигуна і чіпами 432, 434 перетворення сигналу. Генератор 448 PWM двигуна знаходиться в електричному сполученні з двигуном 590 транспортера, встановленим на транспортері 580. У деяких варіантах здійснення, чіп 422 перетворення сигналу кодувальника двигуна знаходиться в електричному сполученні з кодувальником 597 двигуна, виконаним з можливістю вимірювання робочого числа обертів двигуна 590 транспортера. Чіпи 432, 434 перетворення сигналу переважно знаходяться в електричному сполученні з оптичними датчиками 582, 584, відповідно. Реалізація на висівних секціях сівалки Із посиланням на ФІГ. 5A, висівна секція 500 сівалки проілюстрована зі встановленими складовими елементами системи 100 керування. Висівною секцією 500, проілюстрованою на ФІГ. 5A, є одна з висівних секцій, на яких встановлений модуль 200 керування множини секцій. У висівній секції 500 виконавчий механізм 510 притискного зусилля (переважно гідравлічний циліндр) встановлений на брусі 14 для навішування робочих органів. Виконавчий механізм 510 притискного зусилля шарнірно сполучений на нижньому кінці з паралелограмним навісним пристроєм 516. Паралелограмний навісний пристрій 516 підтримує висівну секцію 500 з бруса 14 для навішування робочих органів, дозволяючи кожній висівній секції рухатися вертикально незалежно від бруса для навішування робочих органів і інших розділених проміжками висівних секцій для того, щоб пристосуватися до змін рельєфу або при зіштовхуванні висівної секції з каменем або іншою перешкодою в міру того, як сівалку буксирують по полю. Кожна висівна 3 UA 113660 C2 5 10 15 20 25 30 35 40 45 50 55 60 секція 500 додатково містить встановлювальний кронштейн 520, на якому встановлена балка 522 для підтримки бункера і допоміжна рама 524. Балка 522 для підтримки бункера підтримує насіннєвий бункер 526 і бункер 528 для добрив, а також функціонально підтримує дозатор 530 насіння і насіннєпровід 532. Допоміжна рама 524 функціонально підтримує вузол 534, який нарізає борозну, і вузол 536, який зарівнює борозну. Під час роботи висівної секції 500, вузол 534, що нарізує борозну, нарізує борозну 38 в поверхні 40 ґрунту в міру того, як сівалку буксирують по полю. Насіннєвий бункер 526, який містить насіння, що підлягає посіву, взаємодіє з постійною подачею насіння 42 в дозатор 530 насіння. Модуль 300 приводу переважно встановлюють в дозаторі 530 насіння, як описано в даному описі в іншому місці. В міру того, як модуль 300 приводу приводить в дію дозатор 530 насіння, окреме насіння 42 дозується і завантажується в насіннєпровід 532 з рівномірними часовими проміжками на основі необхідної щільності висівання насіння і швидкості, з якою сівалку буксирують по полю. Датчик 508 насіння, переважно оптичний датчик, підтримується насіннєпроводом 532 і виконаний з можливістю визначення присутності насіння 42, в міру його проходження. Насіння 42 падає з кінця насіннєпроводу 532 в борозну 38, і насіння 42 покривається ґрунтом за допомогою вузла 536 зарівнювального колеса. Вузол 534, який нарізає борозну, переважно містить пару дискових ножів 544, які нарізають борозни, і пару копіювальних коліс 548, вибірково вертикально регульованих відносно дискових ножів 544 за допомогою механізму 568 регулювання глибини. Механізм 568 регулювання глибини переважно повертається навколо датчика 506 притискного зусилля, який переважно містить штир, оснащений тензометрами для вимірювання зусилля, що прикладається ґрунтом 40 на копіювальні колеса 548. Датчик 506 притискного зусилля переважно належить до типу, розкритого в заявці, що одночасно розглядається на патент США того ж заявника № 12/522,253, розкриття якої включене в даний опис за допомогою посилання у всій своїй повноті. У інших варіантах здійснення датчик притискного зусилля належить до типів, розкритих в патенті США № 6,389,999, розкриття якого включене в даний опис за допомогою посилання у всій своїй повноті. Дискові ножі 544 підтримуються з можливістю обертання на стояку 554, що висить на допоміжній рамі 524. Важелі 560 копіювальних коліс шарнірно підтримують копіювальні колеса 548 на допоміжній рамі 524. Копіювальні колеса 548 встановлені з можливістю обертання на важелях 560, що продовжуються уперед, копіювальних коліс. Потрібно мати на увазі, що висівна секція, проілюстрована на ФІГ. 5A, не містить транспортер 580, так що модуль 400 транспортера не потрібно. Повертаючись до ФІГ. 5B, проілюстрована висівна секція 500' сівалки, яка містить транспортер 580 зі встановленими складовими елементами системи 100 керування. Висівна секція 500' аналогічна висівній секції 500, описаній вище, за винятком того, що насіннєпровід 532 був видалений і замінений транспортером 580, виконаним з можливістю переміщення насіння з регульованою швидкістю з дозатора 530 в борозну 42. На транспортері 580 переважно встановлений двигун 590 транспортера, який виконаний з можливістю вибіркового приведення транспортера 580 в дію. Тип транспортера 580 переважно належить до одного з розкритих в заявці на патент США заявника № 61/539,786 і міжнародній патентній заявці заявника № PCT/US2012/057327, що одночасно розглядається, розкриття яких включені в даний опис за допомогою посилання у всій своїй повноті. Як розкрито в даній заявці, транспортер 580 переважно містить стрічку 587, що містить пластини 588, виконані з можливістю переміщення насіння, яке отримується з дозатора 530 насіння на нижній кінець транспортера. На зображенні за ФІГ. 5B висівний транспортер 580 переважно виконаний з можливістю приведення в дію стрічки 587 в напрямку за годинниковою стрілкою. На зображенні за ФІГ. 5B висівний транспортер 580 переважно виконаний з можливістю направлення насіння з верхнього кінця транспортера вниз по передній стороні транспортера таким чином, що насіння опускається з пластинами 588 стрічки 587 на передній стороні транспортера 580 і відкладається з нижнього кінця транспортера таким чином, що під час нормальної роботи на пластинах 588, які підіймаються на задній стороні транспортера, нема ніякого насіння. Оптичний датчик 582 переважно встановлений на передній стороні транспортера 580 і виконаний з можливістю визначення насіння і пластин 588 транспортера, що опускаються, в міру їх проходження. Оптичний датчик 584 переважно встановлений на задній стороні транспортера 580 і виконаний з можливістю визначення пластин 588 транспортера, що підіймаються, в міру того, як вони повертаються в дозатор 530. У інших варіантах здійснення оптичний датчик 582 і/або оптичний датчик 584 можуть бути замінені іншими датчиками об'єктів, виконаними з можливістю визначення наявності насіння і/або пластин, такими, як електромагнітний датчик, який розкритий в заявці на патент США заявника № 12/984,263 (Пуб. № US2012/0169353), що одночасно розглядається. 4 UA 113660 C2 5 10 15 20 25 30 35 40 45 50 55 Додавання модульних складових елементів Порівнюючи варіанти здійснення фіг. 5A і 5B, потрібно мати на увазі, що деякі варіанти здійснення системи 100 керування вимагають модуль 400 транспортера в той час, як деякі ні. Таким чином, шини 250 секцій переважно виконані з можливістю забезпечення користувачеві можливості встановлювати один або більше додаткових модулів локальної мережі контролерів без заміни або зміни шин 250 секцій. Із посиланням на ФІГ. 6A, модифікована система 100' керування містить модифіковані шини 250' секцій, які мають модульне розширення 600 в кожному ряду. Кожне модульне розширення 600 переважно містить перше відведення 610 і друге відведення 620. Кожне відведення 610, 620 переважно містить з'єднання з лініями живлення, заземлення і сигналів шини (наприклад, може Hi і може Lo). Повертаючись до ФІГ. 6B, модифікована система 100" керування відрізняється від системи 100' керування тим, що модуль 400 транспортера був з'єднаний з першим відведенням 610 кожного модульного розширення 600. Потрібно мати на увазі, що друге відведення 620 також доступне для додавання додаткових модулів до мереж 130 секцій. Робота - фаза конфігурування Для того, щоб ефективно ввести в дію систему 100 керування ФІГ. 1, кожний модуль переважно виконаний з можливістю визначення її ідентичності (наприклад, висівної секції або висівних секцій 500, з якими він зв'язаний) і певних конфігураційний даних, таких, як відносне місцеположення зв'язаної з нею висівної секції. Таким чином, під час роботи системи 100 керування, переважно виконується процес 700 конфігурування (ФІГ. 7) для ідентифікації модулів і передачі в кожний модуль конфігураційний даних. На стадії 705 контролюючий пристрій 110 переважно посилає перший ідентифікаційний сигнал в модуль 200a керування множини секцій за допомогою двоточкового з'єднання 160. Модуль 200а керування множини секцій переважно зберігає ідентифікаційні дані (наприклад, вказуючи його статус у вигляді крайнього лівого модуля керування множини секцій) в пам'яті. Продовжуючи з посиланням на стадію 705, модуль 200а керування множини секцій переважно посилає другий ідентифікаційний сигнал в модуль 200b керування множини секцій за допомогою двоточкового електричного з'єднання 161. Модуль 200b керування множини секцій переважно зберігає ідентифікаційні дані (наприклад, вказуючи його статус у вигляді крайнього правого модуля керування множини секцій) в пам'яті. На стадії 710 кожний модуль секції (наприклад, кожний модуль 300 приводу і кожний модуль 400 транспортера) переважно визначає висівну секцію 500, з якою він зв'язаний, на основі напруги в лінії ідентифікації (не показано), яка з'єднує модуль секції з шиною 150 секції. Наприклад, три лінії ідентифікації, які ведуть в модулі 300-1, 300-2, 300-3 приводів, переважно з'єднані із землею, середньою напругою і високою напругою, відповідно. На стадії 715, контролюючий пристрій 110 переважно передає конфігураційні дані, специфічні для мережі секції, в кожний модуль 200 керування множини секцій за допомогою шини 150 знаряддя. Наприклад, конфігураційні дані переважно містять відстані в поперечному напрямку і напрямку руху від кожної висівної секції 500 до приймача 166 GPS і до центра бруса 14 для навішування робочих органів ("GPS зміщення"); GPS зміщення, специфічні для мережі секції, що посилаються в модуль 200а керування множини секцій на стадії 715, переважно відповідають висівним секціям 500-1, 500-2, 500-3 всередині мережі 130а секції. На стадії 720, кожний модуль 200 керування множини секцій переважно передає конфігураційні дані, специфічні для висівної секції, в кожний модуль керування секції (наприклад, модулі 300 приводів) за допомогою шин 250 секцій. Наприклад, модуль 200а керування множини секцій переважно посилає GPS зміщення, відповідні висівній секції 500-1, в модуль 300-1 приводу. Робота - керування модулем приводу Повертаючись до ФІГ. 8, система 100 керування переважно керує кожним модулем 300 приводу згідно зі способом 800. На стадії 805 контролюючий пристрій 110 переважно передає вхідну установку (наприклад, кількість насіння на акр, що підлягає посіву) в кожний модуль 200 керування множини секцій за допомогою шини 150 знаряддя мережі 135 знаряддя. На стадії 810 різні кінематичні датчики в системі 100 керування передають кінематичні сигнали в центральний процесор 120. Наприклад, датчики 164 числа обертів колеса і гіроскоп 162 посилають сигнали числа обертів і сигнали кутової швидкості, відповідно, в центральний процесор 120 за допомогою двоточкових електричних з'єднань. У деяких варіантах здійснення контролюючий пристрій 110 також посилає число обертів, що повідомляється датчиком 168 швидкості, в центральний процесор 120 за допомогою шини 150 знаряддя, причому дане число обертів посилається в центральний процесор 120 за допомогою шини 150 знаряддя. 5 UA 113660 C2 5 10 15 20 25 30 35 40 45 50 На стадії 815 центральний процесор 120 переважно розраховує швидкість центра бруса 14 для навішування робочих органів і кутову швидкість бруса 14 для навішування робочих органів. Швидкість Sc центра бруса для навішування робочих органів може бути розрахована за рахунок усереднення числа обертів Swa, Swb коліс, що повідомляється датчиками 164b, 164a числа обертів коліс, відповідно, або з використанням швидкості трактора, що повідомляється датчиком 168 швидкості. Кутова швидкість w бруса 14 для навішування робочих органів може бути визначена з сигналу кутової швидкості, що генерується гіроскопом 162, або за допомогою використання рівняння: , де: Dwa= бічне зміщення між центром бруса для навішування робочих органів і лівим колесом 520a знаряддя, а Dwb= бічне зміщення між центром бруса для навішування робочих органів і правим колесом 520b знаряддя. На стадії 820 центральний процесор 120 переважно передає швидкість і кутову швидкість сівалки в кожний модуль 200 керування множини секцій за допомогою шини 150 знаряддя мережі 135 знаряддя. На стадії 825 кожний модуль 200 керування множини секцій переважно визначає команду числа обертів дозатора (наприклад, необхідна кількість обертів дозатора в секунду) для кожного модуля приводу всередині його мережі 130 секції. Команду числа обертів дозатора для кожної висівної секції 500 переважно розраховують на основі специфічної для секції швидкості Sr висівної секції. Специфічну для секції швидкість Sr переважно розраховують з використанням швидкості Sc центра бруса для навішування робочих органів, кутової швидкості w і поперечної відстані Dr між насіннєпроводом (або транспортером) висівної секції від центра сівалки (які переважно містяться в конфігураційний даних, що обговорювалися на ФІГ. 7) з використанням співвідношення: Sr=Sc+wDr Команда R числа обертів дозатора може бути розрахована на основі індивідуальної швидкості секції з використанням наступного рівняння: , де: Коефіцієнт Дозатора = кількість отворів для насіння в насіннєвому диску 534, а Міжрядна відстань = поперечна відстань між висівними секціями 500. На стадії 830 модуль 200 керування множини секцій переважно передає команду числа обертів дозатора, визначену для кожного модуля 300 приводу, у відповідний модуль приводу за допомогою шини 250 секції мережі 130 секції. У варіантах здійснення, в яких шина 250 секції містить шину локальної мережі контролерів, модуль 200 керування множини секцій переважно передає групу даних в шину секції, що має поле ідентифікатора, яке уточнює модуль 300 приводу (наприклад, модуль 300-2), і поле даних, яке містить команду числа обертів дозатора для вказаного модуля приводу. На стадії 835 модуль 300 приводу переважно порівнює команду R числа обертів дозатора з виміряним числом обертів дозатора. Модуль 300 приводу переважно розраховує число обертів дозатора, що вимірюється, з використанням часу між імпульсами кодувальника, які отримуються від кодувальника 576 двигуна. На стадії 840 модуль 300 приводу переважно регулює напругу, що використовується для приведення в дію дозатора 530 для того, щоб відрегулювати виміряне число обертів дозатора ближче до команди R числа обертів дозатора. На стадії 845 кожний датчик насіння посилає імпульси насіння у відповідний модуль 200 керування множини секцій. У варіантах здійснення, що містять насіннєпровід 532, кожний датчик 508 насіння переважно посилає імпульси насіння у відповідний модуль 200 керування множини секцій за допомогою двоточкових електричних з'єднань. У варіантах здійснення, що містять насіннєпровід 532, імпульси насіння переважно містять сигнальні імпульси, що мають максимальні значення, які перевищують заздалегідь задане порогове значення. У деяких варіантах здійснення, що містять висівний транспортер 580, кожний датчик 582 насіння переважно посилає імпульси насіння у відповідний модуль 200 керування множини секцій за допомогою шини 250 знаряддя мережі 130 секції. У варіантах здійснення, що містять висівний 6 UA 113660 C2 5 10 15 20 25 30 35 40 45 50 55 60 транспортер 580, імпульси насіння містять сигнальні імпульси, які відрізняються на заздалегідь задане порогове значення від сигнальних імпульсів, що викликаються проходженням пластин транспортера. Альтернативні способи визначення насіння у висівному транспортері 580 описані в даному документі пізніше. На стадії 850 модуль 200 керування множини секцій переважно розраховує щільність висіву, відділення насіння і відстань між насінинами на кожній висівній секції 500 всередині мережі 130 секції з використанням швидкості Sr секції і імпульсів насіння, що передаються з кожної висівної секції всередині мережі секції. На стадії 855 багаторядний модуль 200 передає значення щільності висіву, відділення і відстаней в центральний процесор 120 за допомогою шини 150 знаряддя мережі 130 знаряддя. На стадії 860 центральний процесор 120 переважно передає значення щільності висіву, відділення і відстаней в контролюючий пристрій 110 за допомогою шини 150 знаряддя мережі 135 знаряддя. Робота - керування модулем транспортера Повертаючись до ФІГ. 9, система 100 керування переважно керує кожним модулем 400 транспортера згідно зі способом 900. На стадіях 910-920 система 100 керування переважно проходить такі ж стадії, які описані відносно стадій 810-820 способу 800. На стадії 925 кожний модуль 200 керування множини секцій переважно визначає команду швидкості транспортера для кожного модуля 400 транспортера всередині мережі 130 секції. Команду швидкості транспортера переважно вибирають таким чином, що лінійна швидкість пластин, які рухаються вниз по транспортеру, приблизно дорівнює специфічній для секції швидкості Sr; наприклад, команда числа обертів двигуна транспортера переважно дорівнює специфічній для секції швидкості Sr, помноженій на заздалегідь задану константу. На стадії 930 модуль 200 керування множини секцій переважно передає команди швидкості окремих транспортерів в кожний відповідний модуль 400 транспортера за допомогою шини 250 секції мережі 130 секції. На стадії 935 модуль 400 транспортера переважно порівнює команду швидкості транспортера з виміряною швидкістю транспортера. У деяких варіантах здійснення швидкість транспортера вимірюють з використанням часу між імпульсами пластин, зумовленими проходженням пластинами транспортера оптичного датчика 584. В інших варіантах здійснення швидкість транспортера вимірюють з використанням часу між імпульсами кодувальника, що приймаються від кодувальника 597 двигуна транспортера. На стадії 940 модуль 400 транспортера переважно регулює напругу, що використовується для приведення в дію двигуна 590 транспортера, для того, щоб відрегулювати виміряне число обертів дозатора ближче до команди швидкості транспортера. На стадіях 945-960 модуль 400 транспортера переважно виконує такі ж стадії 845-860, які описані в даному документі відносно способу 800, більш конкретно — ті стадії, які описані для варіантів здійснення, що містять транспортер 580. Способи відправки насіння У варіантах здійснення, що містять висівний транспортер 580, система 100 керування переважно виконана з можливістю підрахунку насіння, насіння з часовою міткою, і визначення норми висіву на основі сигналів, що генеруються першим і другим оптичними датчиками 582, 584. Потрібно мати на увазі, що при нормальній роботі перший оптичний датчик 582 визначає як насіння, так і пластини транспортера, коли насіння з дозатора 530 опускається по транспортеру 580, в той час, як другий оптичний датчик 584 визначає тільки пластини транспортера, коли вони повертаються у верхню частину транспортера після розміщення насіння. Форма і розмір пластин в транспортері 580 переважно по суті узгоджуються. Із посиланням на ФІГ. 17, контролюючий пристрій 110 (або в деяких варіантах здійснення центральний процесор 120) переважно виконані з можливістю здійснення способу 1700 визначення насіння. На стадії 1710 контролюючий пристрій 110 переважно приймає сигнали як від першого оптичного датчика 582, так і від другого оптичного датчика 584 протягом періоду вимірювання. Сигнал 1810 першого оптичного датчика (в якому при проходженні або пластин, або насіння збільшується амплітуда) і сигнал 1820 другого оптичного датчика (в якому амплітуда збільшується при проходженні пластин) проілюстровані на наведеному для прикладу багатосигнальному графіку 1800 на ФІГ. 18. На стадії 1715 система 100 керування переважно змінює швидкість транспортера під час періоду вимірювання таким чином, що довжина сигнальних імпульсів, зумовлена стрічками, має таку ж довжину (як найкраще проілюстровано якщо розглядати імпульси з шириною, що змінюється, в сигналі 1820 датчика). На стадії 1720 контролюючий пристрій 110 переважно прикладає часовий зсув Ts (наприклад, часовий зсув Ts, проілюстрований на ФІГ. 18) до сигналу 1820 другого оптичного датчика, приводячи в результаті до зсунутого у часі сигналу 1820' датчика. Часовий зсув Ts пов'язаний зі швидкістю транспортера і переважно розраховується таким чином: 7 UA 113660 C2 5 10 15 20 25 30 35 40 45 50 55 Ts=kTf, де: Tf= Середній час між пластинами, що виявляються другим оптичним датчиком 258 k= постійне значення, що переважно визначається як описано нижче. Значення k пов'язане з геометрією транспортера і оптичного датчика, і в деяких варіантах здійснення визначається таким чином: , де: Ds= Лінійна відстань проходу між першим і другим оптичними датчиками Df= Відстань між пластинами DEC(х) повертає десяткову частину х (наприклад, DEC(105,2)=0,2). У інших варіантах здійснення контролюючий пристрій 110 переважно емпірично розраховує k на стадії налаштування в той час, як насіння не висівається за допомогою проганяння транспортера 580 з постійною швидкістю і визначення значень Tf і Ts; без насіння на стрічці значення Ts може бути визначене за допомогою вимірювання часу між імпульсом пластини в першому оптичному датчику 582 і найближчим наступним за ним імпульсом пластини у другому оптичному датчику 584. У інших варіантах здійснення датчики 582, 584 розташовані на відносній відстані Ds, що дорівнює цілому числу, кратному Df, так що не потрібен часовий зсув або близький до нуля часовий зсув. Продовжуючи з посиланням на спосіб 1700 ФІГ. 17, на стадії 1725 контролюючий пристрій 110 переважно віднімає зсунутий у часі сигнал 1820' другого оптичного датчика від сигналу 1810 першого оптичного датчика, внаслідок чого виходить скоректований по пластині сигнал 1830 (див. ФІГ. 18), який корелює з сигналом з сигналу першого оптичного датчика, при цьому по суті усуваються сигнальні імпульси, зумовлені пластинами транспортера. На стадії 1730 контролюючий пристрій 110 переважно порівнює імпульси 1832 в скоректованому по пластині сигналі 1830 з одним або більше пороговими значеннями достовірності імпульсів насіння (наприклад, з пороговим значенням мінімальної амплітуди і з пороговим значенням мінімального періоду); контролюючий пристрій переважно ідентифікує кожний імпульс, що перевищує порогові значення достовірності імпульсів насіння, як достовірну подію насіння. На стадії 1735 контролюючий пристрій 110 переважно додає ідентифіковану подію насіння до підрахунку насіння. На стадії 1740 контролюючий пристрій 110 переважно зберігає кількість насіння; норму висіву (наприклад, кількість насіння протягом заздалегідь заданого періоду часу); час, пов'язаний з подією насіння, кількістю насіння або нормою висіву; і GPS, пов'язану з подією насіння, кількістю насіння або нормою висіву в пам'яті для картування, відображення і збереження даних. Альтернативні варіанти здійснення - Мережі Єдиних Секцій У альтернативній системі 100''' керування, проілюстрованій на ФІГ. 16, кожна з множини мереж 132 секцій містить модуль 202 керування єдиної секції, встановлений на одній з висівних секцій 500, шину 250 секції, модуль 300 приводу, окремо встановлений на тій же самій висівній секції 500, і модуль 400 транспортера, окремо встановлений на тій же самій висівній секції 500. Модуль 202 керування єдиної секції переважно містить еквівалентні складові елементи з модулем 200 керування множини секцій, за винятком того, що чіп 206 перетворення сигналу притискного зусилля, допоміжний вхід 208 датчика насіння і генератор 210 PWM електромагніта притискного зусилля знаходяться в електричному сполученні тільки з одним з відповідних пристроїв, встановлених на тій же самій висівній секції 500. Додатково, в альтернативній системі 100''' керування шина 250 секції знаходиться в електричному сполученні з єдиним модулем 300 приводу і єдиним модулем 400 транспортера, а також з модулем 202 керування єдиної секції. В інших варіантах здійснення два дозатори 530 насіння встановлені на єдиній висівній секції 500, як описано в попередній заявці на патент США № 61/838,141. У подібних варіантах здійснення модуль 300 приводу функціонально сполучений з кожним дозатором 530 насіння. На ФІГ. 19 проілюстрована мережа 132' секції, що має два модулі 300 приводів. Мережа 132' секції переважно містить модуль 202 керування єдиної секції, шину 250 секції, перший модуль 300а приводу (переважно встановлений на висівній секції 500), другий модуль 300b приводу (переважно встановлений на висівній секції 500), модуль 400 транспортера, вхідний контролер 307 і джерело 309 живлення ідентифікації. Перший модуль 300а приводу і другий модуль 300b приводу, що містить складові елементи апаратного забезпечення і програмного забезпечення, переважно є по суті ідентичними. Модуль 202 керування єдиної секції, перший модуль 300а приводу, другий модуль 300b приводу і модуль 250 транспортера переважно знаходяться в 8 UA 113660 C2 5 10 15 20 25 30 35 40 45 50 55 електричному сполученні з шиною 250 секції. Модуль 202 керування єдиної секції переважно знаходиться в електричному сполученні з шиною 150 знаряддя одного з варіантів здійснення системи керування, описаних в даному документі. Перший модуль 300а приводу переважно знаходиться в електричному сполученні з джерелом 309 живлення ідентифікації і вхідним контролером 307. Перший модуль 300а приводу переважно знаходиться в електричному сполученні з вхідним контролером 307 за допомогою електричної лінії 311. Джерело 309 живлення ідентифікації переважно подає сигнал низької напруги в перший модуль 300а приводу і може містити двоточкове з'єднання з джерелом живлення, що містить відносно великий резистор. Вхідним контролером 307 переважно є контролер смуги і/або норми, виконаний з можливістю відключення і/або зміни норми внесення сільськогосподарських матеріалів, що вносяться, таких, як (без обмеження) рідке добриво, сухе добриво, рідкий інсектицид або сухий інсектицид. Під час встановлювальної фази роботи мережі 132' секції, перший модуль 300а приводу приймає сигнал від джерела 309 живлення ідентифікації і посилає відповідний ідентифікаційний сигнал в контролюючий пристрій 110 (і/або центральний процесор 120), ідентифікуючи себе, як перший модуль 300а приводу. Надалі, контролюючий пристрій 110 (і/або центральний процесор 120) переважно посилає команди в перший модуль 300а приводу і зберігає дані, отримані від першого модуля 300а приводу на основі ідентифікаційного сигналу. Під час польової роботи мережі 132' секції, контролюючий пристрій 110 визначає, який дозатор 530 насіння повинен висівати за допомогою порівняння інформації про положення, отриманої від приймача 166 GPS з картою внесення. Потім контролюючий пристрій 110 переважно подає модулю 202 керування єдиної секції команду послати необхідну норму висіву в модуль приводу, пов'язаний з дозатором 530, який повинен висівати, наприклад, перший модуль 300а приводу. У варіантах здійснення, в яких вхідний контролер 307 являє собою контролер смуги, виконаний з можливістю включення або виключення сухого або рідкого сільськогосподарського матеріалу, що вноситься, перший модуль 300а приводу переважно посилає у вхідний контролер сигнал команди, подаючи вхідному контролеру команду виключення відповідного матеріалу, що вноситься, наприклад, за допомогою перекриття клапана. У варіантах здійснення, що містять тільки єдиний дозатор 530 насіння і єдиний модуль 300 приводу, що взаємодіє з кожною висівною секцією, модуль 300 приводу передає по лінії 311 у вхідний контролер 307 перший сигнал (наприклад, високий сигнал), коли модуль приводу подає дозатору насіння команду висіву, і передає другий сигнал (наприклад, низький сигнал) або не подає сигнал, коли модуль приводу не подає дозатору насіння команду висіву. Лінія 311 переважно виконана з можливістю електричної взаємодії з будь-яким з множини вхідних контролерів, наприклад, за рахунок вміщення стандартного електричного конектора. Перший і другий сигнал переважно вибирають з відповідністю командам смуги, розпізнаваним будь-яким з множини вхідних контролерів таким чином, що вхідний контролер 307 виключає сільськогосподарський матеріал, що вноситься, коли дозатор 530 насіння не висіває і включає сільськогосподарський матеріал, що вноситься, коли дозатор 530 насіння висіває. У варіантах здійснення, в яких вхідний контролер 307 являє собою контролер смуги, і в яких кожна висівна секція містить два дозатори 530 насіння і взаємодіючі модулі 300, 300b приводів, перший модуль 300а приводу переважно приймає сигнал від шини 250 секції (що переважно генерується або модулем 202 керування єдиної секції, або другим модулем 300b приводу), показуючи, чи подає другий модуль приводу своєму взаємодіючому дозатору 530 насіння команду висіву. Потім перший модуль 300а приводу визначає, чи подає перший модуль 300а, або 300b приводи команду висіву якому-небудь з дозаторів 530 насіння. Якщо жоден з модулів 300a, 300b приводів не подає якому-небудь дозатору насіння команду висіву, перший модуль 300а приводу переважно посилає перший сигнал у вхідний контролер 307 за допомогою лінії 311. Вхідний контролер 307 переважно виконаний з можливістю виключення сільськогосподарського матеріалу (наприклад, за допомогою перекриття клапана), що вноситься, при отриманні першого сигналу. Якщо який-небудь з модулів 300a, 300b приводів подає якому-небудь дозатору насіння команду висіву, перший модуль 300а приводу переважно посилає у вхідний контролер 307 другий сигнал (або в деяких варіантах здійснення не посилає сигнал) таким чином, що вхідний контролер не відключає сільськогосподарський матеріал, що вноситься. У варіантах здійснення, в яких вхідний контролер 307 являє собою контролер норми, виконаний з можливістю зміни норми внесення сухого або рідкого сільськогосподарського матеріалу, що вноситься, контролюючий пристрій 110 (і/або центральний процесор 120) 9 UA 113660 C2 5 10 15 переважно визначає необхідну норму внесення сільськогосподарського матеріалу, що вноситься, і передає у вхідний контролер відповідний сигнал. Складові елементи, описані в даному документі, які знаходяться в електричному сполученні, можуть знаходитися в інформаційному сполученні (наприклад, з можливістю передачі інформації, включаючи аналогові і/або цифрові сигнали) за допомогою будь-якого відповідного пристрою або пристроїв, включаючи безпровідні комунікаційні пристрої (наприклад, радіопередавачі і приймачі). Вищевикладений опис представлений для того, щоб дозволити фахівцеві в даній галузі техніки створити і застосувати винахід і представлений в контексті патентної заявки і її вимог. Різні модифікації до переважного варіанта здійснення пристрою, і загальні принципи і ознаки системи і способів, описаних в даному описі, будуть повністю очевидні фахівцям в даній галузі техніки. Таким чином, запропонований винахід не повинен обмежуватися варіантами здійснення пристрою, системи і способів, описаних вище і проілюстрованих на фігурах креслень, а повинен відповідати найбільш широкому об'єму правових домагань, що узгоджується з суттю і об'ємом правових домагань прикладеної формули винаходу. ФОРМУЛА ВИНАХОДУ 20 25 30 35 40 45 50 55 60 1. Система моніторингу для сільськогосподарського знаряддя з множиною висівних секцій, яка містить: дозатор насіння; висівний транспортер, який має передню сторону і задню сторону, при цьому вказаний висівний транспортер виконаний з можливістю приймання насіння з вказаного дозатора насіння і містить стрічку, яка має множину пластин, виконаних з можливістю переміщення вказаного насіння, при цьому вказаний висівний транспортер виконаний з можливістю направлення вказаного насіння вниз по вказаній передній стороні вказаного висівного транспортера до нижнього кінця вказаного висівного транспортера і вивільнення вказаного насіння з вказаного нижнього кінця, причому вказані пластини підіймаються по вказаній задній стороні без вказаного насіння; перший датчик насіння, встановлений на вказаній передній стороні вказаного транспортера і виконаний з можливістю визначення присутності насіння і пластин, що опускаються по вказаній передній стороні вказаного висівного транспортера; двигун, виконаний з можливістю приведення в дію вказаного висівного транспортера; датчик швидкості, виконаний з можливістю вимірювання швидкості руху висівної секції, зв'язаної з вказаним висівним транспортером; другий датчик насіння, встановлений на вказаній задній стороні вказаного висівного транспортера і виконаний з можливістю визначення присутності пластин, що підіймаються по вказаній задній стороні вказаного висівного транспортера; і контролюючий пристрій, який містить процесор, при цьому вказаний контролюючий пристрій знаходиться в інформаційному сполученні з вказаним двигуном, вказаним датчиком швидкості, вказаним першим датчиком насіння і вказаним другим датчиком насіння, причому вказаний контролюючий пристрій визначає необхідне число обертів двигуна для збігу швидкості вивільнення насіння з вказаною швидкістю руху, і при цьому вказаний контролюючий пристрій подає вказаному двигуну команду зміни фактичного числа обертів вказаного двигуна до вказаного необхідного числа обертів двигуна. 2. Система моніторингу за п. 1, в якій вказаний перший датчик насіння являє собою оптичний датчик, і вказаний другий датчик насіння являє собою оптичний датчик. 3. Система моніторингу за п. 1, в якій вказаний контролюючий пристрій виконаний з можливістю реєстрації першого сигналу, що генерується вказаним першим датчиком насіння, і другого сигналу, що генерується вказаним другим датчиком насіння. 4. Система моніторингу за п. 3, в якій вказаний контролюючий пристрій виконаний з можливістю генерування скоректованого сигналу на основі вказаного першого сигналу і вказаного другого сигналу. 5. Система моніторингу за п. 3, в якій вказаний контролюючий пристрій виконаний з можливістю віднімання від амплітуди частини першого сигналу вказаного першого сигналу на основі амплітуди частини другого сигналу вказаного другого сигналу, при цьому вказаний контролюючий пристрій виконаний з можливістю накладення часового зсуву на вказаний другий сигнал. 6. Система моніторингу за п. 3, в якій вказаний перший сигнал містить частину імпульсу насіння і частину імпульсу пластини, при цьому вказаний контролюючий пристрій виконаний з можливістю проведення відмінності між вказаною частиною імпульсу насіння і вказаною 10 UA 113660 C2 5 10 15 20 25 30 35 40 45 50 частиною імпульсу пластини за допомогою порівняння вказаного першого сигналу з вказаним другим сигналом. 7. Система моніторингу за п. 6, в якій вказаний контролюючий пристрій виконаний з можливістю ідентифікації вказаної частини імпульсу насіння на основі синхронізації імпульсу пластини у вказаному другому сигналі. 8. Спосіб моніторингу сільськогосподарського знаряддя, який включає: приймання насіння у верхню частину висівного транспортера, що містить стрічку з множиною пластин; переміщення насіння між вказаними пластинами з верхньої частини вказаного висівного транспортера в нижню частину вказаного висівного транспортера; вивільнення насіння з вказаної нижньої частини вказаного висівного транспортера; при цьому перший датчик визначає проходження як вказаним насінням, так і вказаними пластинами першого місцеположення в міру того, як вказане насіння і вказані пластини проходять з вказаної верхньої частини вказаного висівного транспортера до вказаної нижньої частини вказаного висівного транспортера, причому вказаний перший датчик встановлений в першій частині вказаного висівного транспортера, а вказані пластини проходять через вказану першу частину по суті в напрямку вниз і переміщують насіння по суті в напрямку вниз через вказану першу частину; і при цьому другий датчик визначає проходження вказаними пластинами другого місцеположення в міру того, як вказані пластини проходять з вказаної нижньої частини вказаного висівного транспортера до вказаної верхньої частини вказаного висівного транспортера після того, як вказане насіння вивільняється з вказаних пластин, причому вказаний другий датчик встановлений у другій частині вказаного висівного транспортера, при цьому вказані пластини проходять через вказану другу частину по суті в напрямку вгору і не переміщують насіння через вказану другу частину. 9. Спосіб за п. 8, який додатково включає: проведення відмінності між насінням і пластинами у вказаному першому місцеположенні на основі часу, в який пластини визначаються у вказаному другому місцеположенні. 10. Спосіб за п. 9, в якому стадію проведення відмінності між насінням і пластинами виконують за допомогою: генерування вихідного сигналу насіння, що свідчить про проходження насіння і пластин мимо вказаного першого місцеположення; генерування сигналу пластин, що свідчить про проходження пластин мимо вказаного другого місцеположення; і ідентифікації імпульсу насіння у вказаному вихідному сигналі насіння на основі вказаного сигналу пластин. 11. Спосіб за п. 10, в якому стадію ідентифікації імпульсу насіння у вказаному вихідному сигналі насіння на основі вказаного сигналу пластин виконують за допомогою: накладення часового зсуву на один з вказаного сигналу пластин і вказаного вихідного сигналу насіння; ідентифікації частин проходження пластин вказаного вихідного сигналу насіння за допомогою порівняння вказаного сигналу пластин з вказаним вихідним сигналом насіння; і ідентифікації частин проходження насіння вказаного вихідного сигналу насіння за допомогою порівняння частин, відмінних від вказаних частин проходження пластин, з пороговим значенням події насіння. 12. Спосіб за п. 11, в якому вказаний часовий зсув співвіднесений з часом між імпульсом у вказаному вихідному сигналі насіння і безпосередньо подальшим імпульсом у вказаному сигналі пластини. 13. Спосіб за п. 9, який додатково включає: накладення зміни швидкості на робочу швидкість вказаного висівного транспортера. 14. Спосіб за п. 13, який додатково включає: визначення швидкості руху вказаного висівного транспортера, при цьому вказана зміна швидкості основана на вказаній швидкості руху. 15. Спосіб за п. 14, в якому вказаною швидкістю руху є конкретна швидкість висівної секції. 11 UA 113660 C2 12 UA 113660 C2 13 UA 113660 C2 14 UA 113660 C2 15 UA 113660 C2 16 UA 113660 C2 17 UA 113660 C2 18 UA 113660 C2 19 UA 113660 C2 20 UA 113660 C2 21 UA 113660 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 22
ДивитисяДодаткова інформація
Назва патенту англійськоюSystems, methods and apparatus for multi-row agricultural implement control and monitoring
Автори англійськоюBaurer, Phil, Sauder, Tim, Stoller, Jason, Sauder, Derek, Hodel, Jeremy
Автори російськоюБорер Фил, Саудер Тим, Столлер Джэйсон, Саудэр Дэрэк, Ходэл Джэрэми
МПК / Мітки
МПК: A01C 7/18, G01V 8/10, G06M 7/02, A01C 7/20
Мітки: сільськогосподарського, багаторядного, моніторингу, знаряддя, керування, спосіб, система
Код посилання
<a href="https://ua.patents.su/24-113660-sistema-ta-sposib-dlya-keruvannya-i-monitoringu-bagatoryadnogo-silskogospodarskogo-znaryaddya.html" target="_blank" rel="follow" title="База патентів України">Система та спосіб для керування і моніторингу багаторядного сільськогосподарського знаряддя</a>
Сільськогосподарське знаряддя і спосіб експлуатації сільськогосподарського знаряддя
Номер патенту: 90855
Опубліковано: 10.06.2010
Автор: Маєр Бредлі Дж
МПК: A61C 7/00, B65G 67/02
Мітки: сільськогосподарське, спосіб, знаряддя, сільськогосподарського, експлуатації
Формула / Реферат:
1. Сільськогосподарське знаряддя, що містить раму, щонайменше один бак для матеріалу, установлений на рамі щонайменше перший важіль, з'єднаний з можливістю повороту з рамою, транспортер, з'єднаний з щонайменше першим важелем для транспортування матеріалу, і гідравлічну позиційну систему, з'єднану з транспортером, для переміщення транспортера в щонайменше двох напрямках в вибране одне з багатьох заданих положень, яке відрізняється тим, що...
Система регулювання підйому робочих інструментів сільськогосподарського знаряддя
Номер патенту: 57598
Опубліковано: 16.06.2003
Автори: Паркер Пол Девід, Нунан Джеймс Томас, Пейн Девід Алан
МПК: A01B 63/00, A01B 63/10
Мітки: знаряддя, сільськогосподарського, робочих, інструментів, підйому, регулювання, система
Формула / Реферат:
1. Система регулювання підйому робочих інструментів сільськогосподарського знаряддя, що включає поперечну раму для кріплення інструментів з передньою і задньою частинами, пристосованого для руху уперед по поверхні землі за допомогою буксирувального транспорту і забезпеченому множиною поперечно розміщених підіймальних вузлів для підняття і опускання рами відносно землі, в якому система регулювання підйому містить гідравлічні циліндри, з'єднані...
Система керування потоком повітря всередині системи дозування сільськогосподарського продукту
Номер патенту: 110665
Опубліковано: 25.01.2016
Автор: Ковальчук Тревор Лоуренс
МПК: A01C 7/08, B65G 53/04, A01C 7/20
Мітки: керування, продукту, системі, дозування, система, сільськогосподарського, повітря, потоком
Формула / Реферат:
1. Система розподілу сільськогосподарського продукту, що містить: систему переміщення повітря, яка має повітродувку, виконану з можливістю забезпечення струменя повітря для переміщення дозованого продукту до пристрою розподілу, причому система переміщення повітря встановлена на пневматичному возику; і схему керування, встановлену на сільськогосподарському транспортному засобі і виконану з можливістю регулювання швидкості повітродувки...
Копіювальне колесо для сільськогосподарського знаряддя та сільськогосподарське знаряддя
Номер патенту: 106197
Опубліковано: 11.08.2014
Автори: Кассіді Скотт, Маріман Натан Алберт, Аронова Поліна
МПК: B60C 7/00, A01C 5/06, A01C 7/20
Мітки: сільськогосподарського, колесо, копіювальне, знаряддя, сільськогосподарське
Формула / Реферат:
1. Копіювальне колесо для сільськогосподарського знаряддя, яке містить:обід, що має зовнішнє коло йшину, змонтовану на зовнішньому колі, причому шина містить зовнішню оболонку, виготовлену з першого еластичного матеріалу, й внутрішнє осердя, виготовлене з іншого другого еластичного матеріалу, причому перший еластичний матеріал твердіший за другий еластичний матеріал, причому внутрішнє осердя встановлене безпосередньо на...
Двосторонній рамний шарнір для сільськогосподарського знаряддя
Номер патенту: 108625
Опубліковано: 25.05.2015
Автор: Пейлен Нельсон
МПК: A01B 73/00
Мітки: знаряддя, рамний, сільськогосподарського, двосторонній, шарнір
Формула / Реферат:
1. Шарнір, який містить першу і другу вісь повороту, причому згадана перша вісь повороту передбачена для шарнірного з'єднання першої секції із загаданим шарніром, причому згадана друга вісь повороту передбачена для шарнірного з'єднання другої секції із згаданим шарніром, при цьому згадана друга секція виконана з можливістю повертання навколо згаданої першої осі повороту для складання згаданої другої секції відносно згаданої першої секції, і...
Попередній патент: Аустенітний сталевий сплав з високою тривалою міцністю та стійкістю проти окислення та корозії при підвищених робочих температурах та виріб, виготовлений з такого сплаву
Наступний патент: Спосіб розділення емульсії типу “масло у воді” за допомогою катіонного співполімера на основі вінілімідазолію
Випадковий патент: Гербіцидні сполуки і гербііцидні композиції на їх основі