Система регулювання підйому робочих інструментів сільськогосподарського знаряддя
Номер патенту: 57598
Опубліковано: 16.06.2003
Автори: Паркер Пол Девід, Нунан Джеймс Томас, Пейн Девід Алан
Формула / Реферат
1. Система регулювання підйому робочих інструментів сільськогосподарського знаряддя, що включає поперечну раму для кріплення інструментів з передньою і задньою частинами, пристосованого для руху уперед по поверхні землі за допомогою буксирувального транспорту і забезпеченому множиною поперечно розміщених підіймальних вузлів для підняття і опускання рами відносно землі, в якому система регулювання підйому містить гідравлічні циліндри, з'єднані з підіймальними вузлами, і вузол регулювальних клапанів, сполучений з гідравлічними циліндрами і з джерелом гідравлічної рідини під тиском, з вибірковою дією регулювальних клапанів для висунення і втягування гідравлічних циліндрів підіймальних вузлів підняття і опускання рами, яка відрізняється тим, що вона забезпечена перетворювальними елементами, що реагують на спрацювання підіймальних вузлів і що виробляють вихідні сигнали в залежності від положення рами, і електронним блоком управління, сполученим з системою регулювальних клапанів і перетворювачами і чутливим до вихідних сигналів перетворювача, що забезпечує можливість роздільного впливання на гідравлічні циліндри для приведення рами в задане положення відносно землі.
2. Система регулювання підйому по п. 1, яка відрізняється тим, що блок регулювальних клапанів включає електрогідравлічний клапан, встановлений між джерелом тиску і кожним з циліндрів.
3. Система регулювання підйому по п. 2, яка відрізняється тим, що електрогідравлічний клапан являє собою двопозиційний клапан.
4. Система регулювання підйому по п. 2, яка відрізняється тим, що електрогідравлічний клапан являє собою пропорційний клапан для регулювання потоку рідини в залежності від вихідних сигналів перетворювачів.
5. Система регулювання підйому по п. 1, яка відрізняється тим, що перетворювальні елементи включають перетворювач, що виробляє напруження в залежності від величини висунення циліндра.
6. Система регулювання підйому по п. 1, яка відрізняється тим, що перетворювальні елементи включають перетворювач, що виробляє напруження в залежності від розташування частини підіймальних вузлів.
7. Система регулювання підйому по п. 1, яка відрізняється тим, що блок управління включає регулювальний орган зміщення для підтримки вибраних частин рами в різних положеннях один відносно одного.
8. Система регулювання підйому по п. 7, яка відрізняється тим, що підіймальні вузли включають перший і другий підіймальні вузли, розміщені спереду і позаду, а регулювальний орган зміщення забезпечує регулювання передньої частини рами відносно задньої частини.
9. Система регулювання підйому по п. 7, яка відрізняється тим, що рама включає центральну секцію і флангову секцію, приєднані до центральної секції з можливістю повороту, а регулювальний орган зміщення настроєний таким чином, щоб змінювати робоче заглиблення флангової секції.
10. Система регулювання підйому по п. 7, яка відрізняється тим, що вона включає регулювальний орган нахилу для регулювання передньої частини рами відносно задньої частини рами.
11. Система регулювання підйому по п. 1, яка відрізняється тим, що вона включає перший регулювальний орган заглиблення і проміжний регулювальний орган заглиблення, де перший регулювальний орган заглиблення призначений для вибору нормального робочого заглиблення, а проміжний регулювальний орган заглиблення призначений для вибору другого зміщення заглиблення від нормального робочого заглиблення.
12. Система регулювання підйому по п. 1, яка відрізняється тим, що регулювальні органи заглиблення мають фіксовані положення.
13. Система регулювання підйому по п. 10, яка відрізняється тим, що вона включає регулювальний орган рівня для регулювання рівня однієї з сторін рами відносно протилежної сторони рами.
14. Система регулювання підйому по п. 1, яка відрізняється тим, що вона включає регулювальний орган нахилу для зміни глибини заглиблення інструментів, що підтримуються передньою частиною, відносно глибини заглиблення інструментів, що підтримуються задньою частиною.
15. Система регулювання підйому по п. 1, яка відрізняється тим, що вона включає регулювальний орган прив'язки до нуля для установки еталонного рівня глибини заглиблення інструментів, встановлених на рамі.
16. Система регулювання підйому по п. 1, яка відрізняється тим, що вона включає регулювальний орган прив'язки до рівня для установки горизонтального положення рами.
17. Система регулювання підйому по п. 16, яка відрізняється тим, що вона включає операторський регулювальний орган для установки положення, зміщеного від горизонтального положення рами.
18. Система регулювання підйому робочих інструментів сільськогосподарського знаряддя, пристосованого для руху уперед по поверхні землі і що включає поперечну раму, підтримуючу ґрунтообробні інструменти, і підіймальні вузли, встановлені на рамі, і вибірково переміщувані для підняття і опускання інструментів між піднятими транспортними положеннями і опущеними робочими положеннями, а також для зміни положення ґрунтообробних інструментів, коли ґрунтообробні інструменти знаходяться в робочому положенні, де підіймальні вузли включають окремі гідравлічні циліндри, в якому система регулювання підйому містить блок електрогідравлічних клапанів, сполучений з гідравлічними циліндрами, і джерело гідравлічної рідини під тиском, що вибірково приєднується до блока електрогідравлічних клапанів, яка відрізняється тим, що вона забезпечена перетворювальними елементами, зв'язаними з циліндрами і виробляючими перетворювальні сигнали в залежності від положення кожного з підіймальних вузлів, операторський блок управління (ОБУ) для виробки сигналів бажаних положень, блок управління знаряддям (БУЗ), який містить введення, сполучені з перетворювачами і з ОБУ, і відведення, з'єднані з блоком електрогідравлічних клапанів, де БУЗ чутливий до сигналів перетворювача і сигналів бажаних положень для регулювання стану клапанів, що дає можливість роздільно регулювати гідравлічні циліндри і підтримувати інструменти в бажаних положеннях відносно землі, і де ОБУ включає регулювальні органи для виборчої зміни положення інструментів, суміжних з одним з підіймальних вузлів, незалежно від положення інструментів, суміжних з іншими підіймальними вузлами.
19. Система регулювання підйому по п. 18, яка відрізняється тим, що ОБУ включає регулювальний орган прив'язки до рівня для передачі на БУЗ сигналу еталонного рівня, а також включає регулювальний орган зміщення для регулювання вертикального положення поперечно розміщених інструментів відносно положення інструментів на еталонному рівні.
20. Система регулювання підйому по п. 18, яка відрізняється тим, що підіймальні вузли зміщені в подовжньому напрямі один відносно одного, а також включає регулювальний орган нахилу, що передає на БУЗ сигнал зміщення для виборчої зміни регулювання окремих циліндрів з метою нахилу інструментів в подовжньому напрямі.
Текст
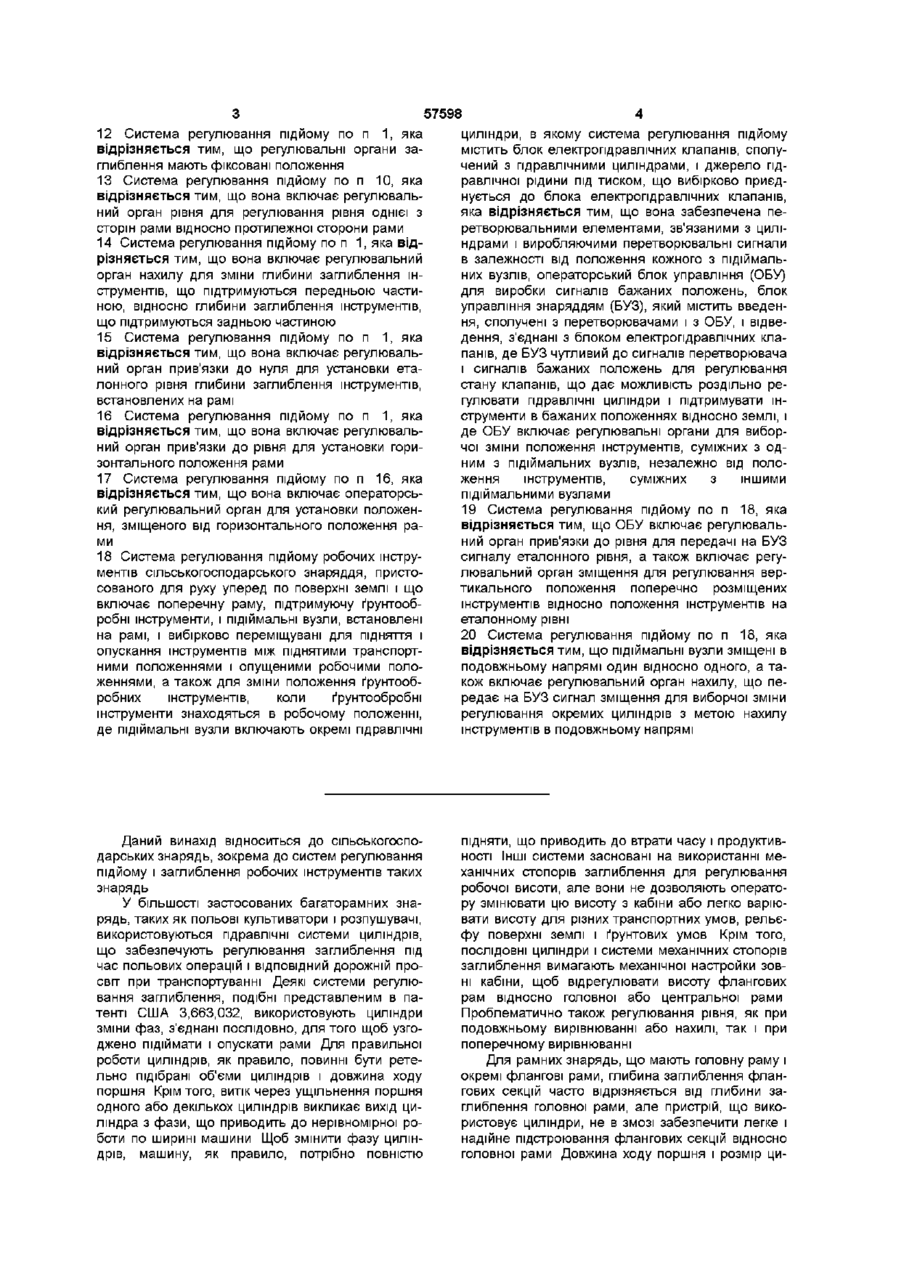
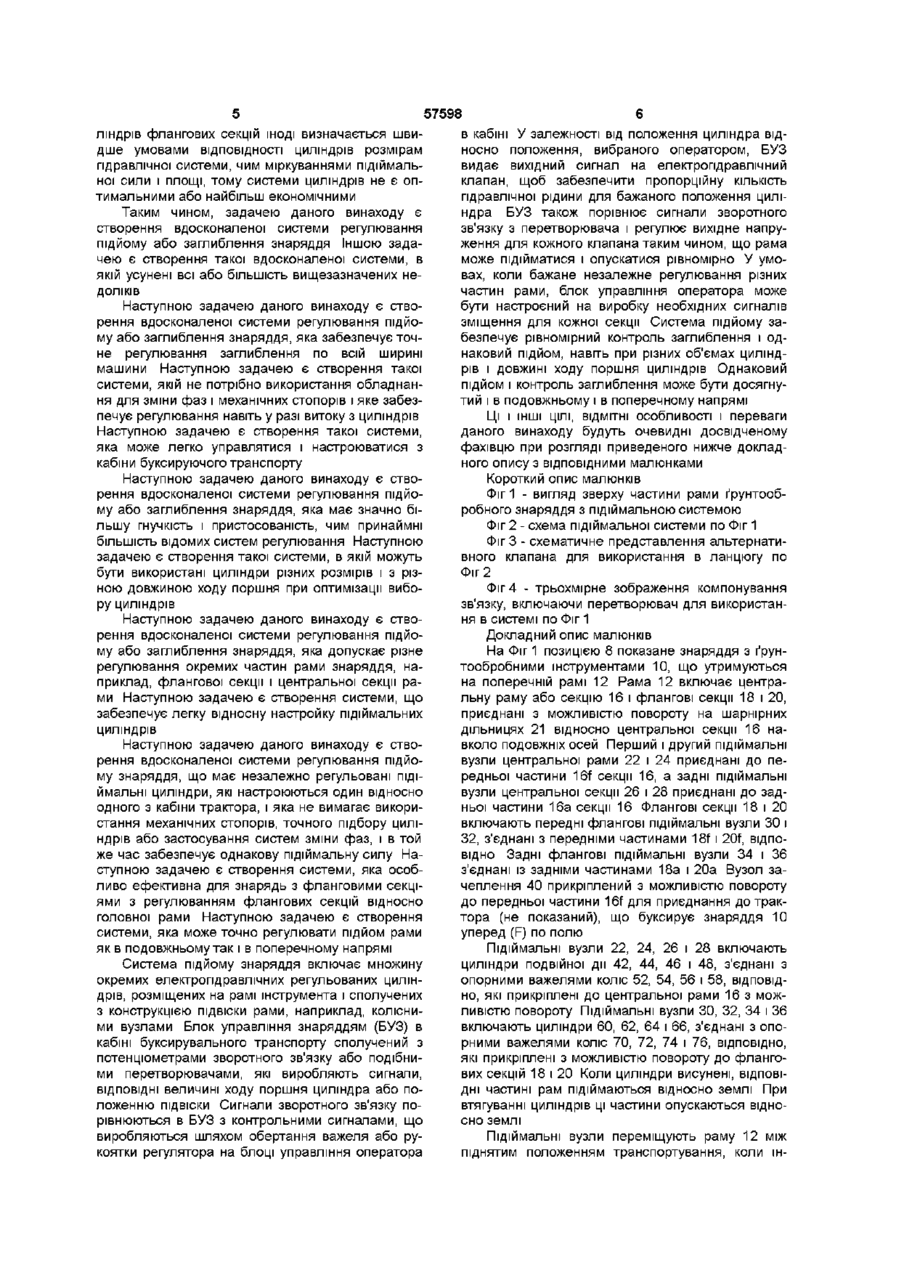
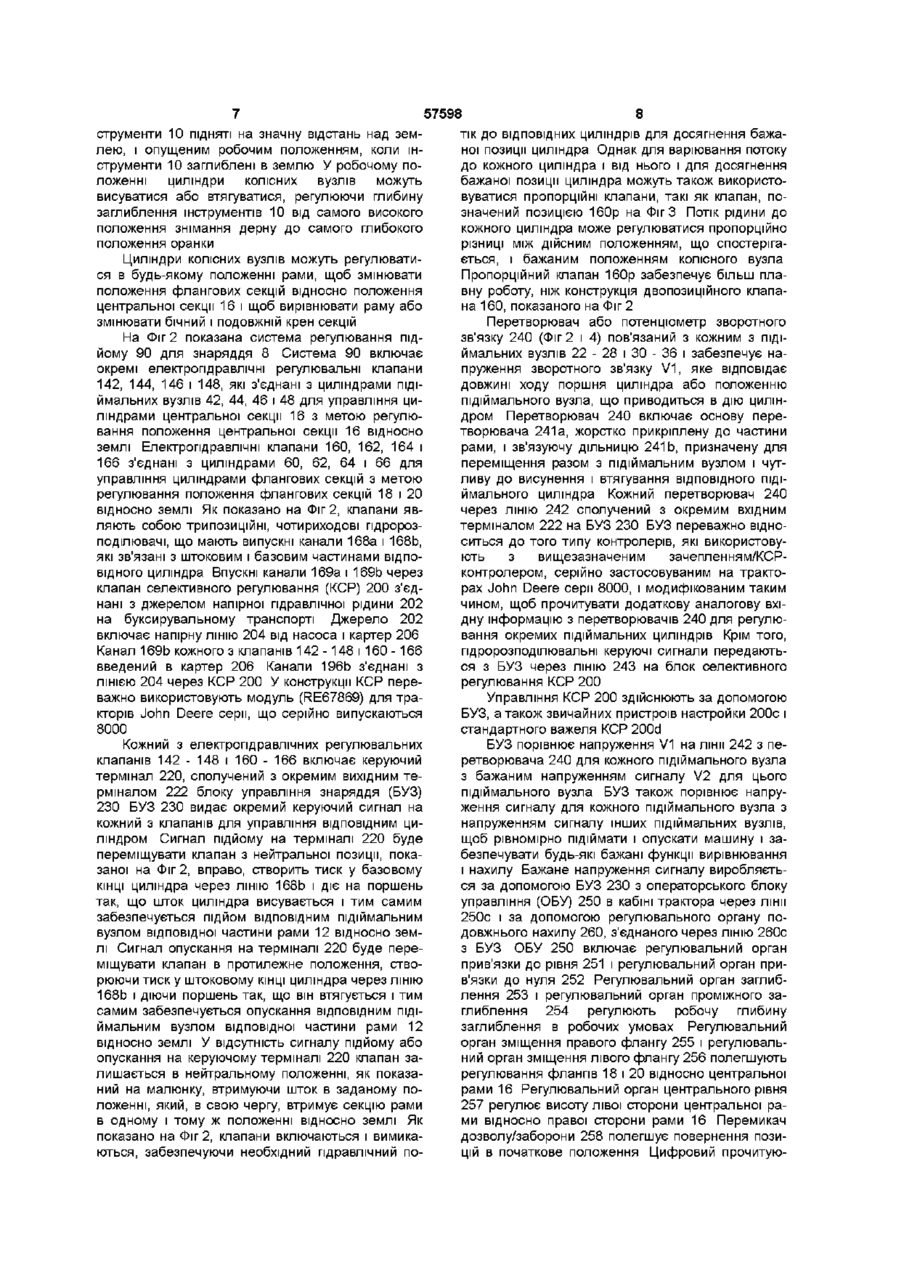
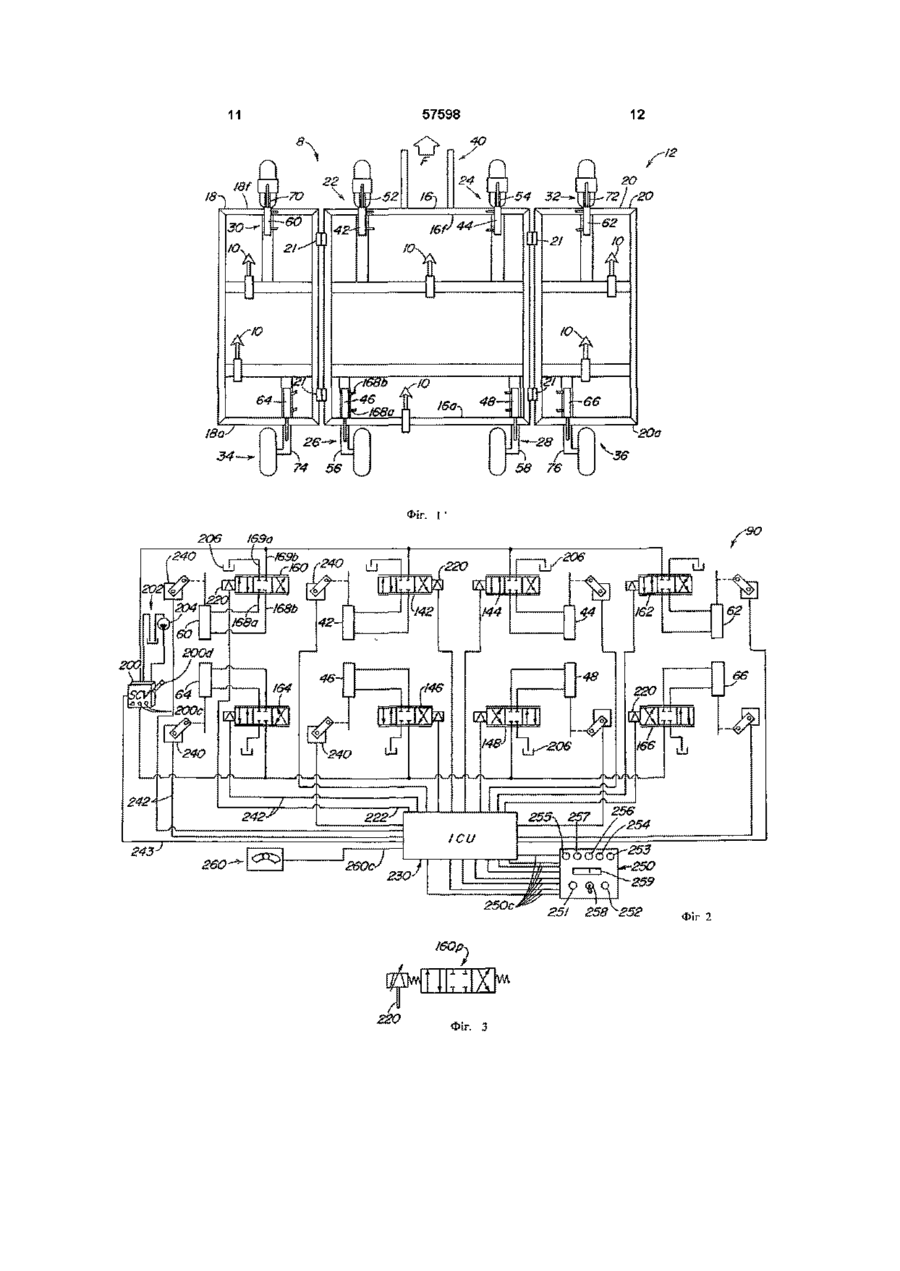
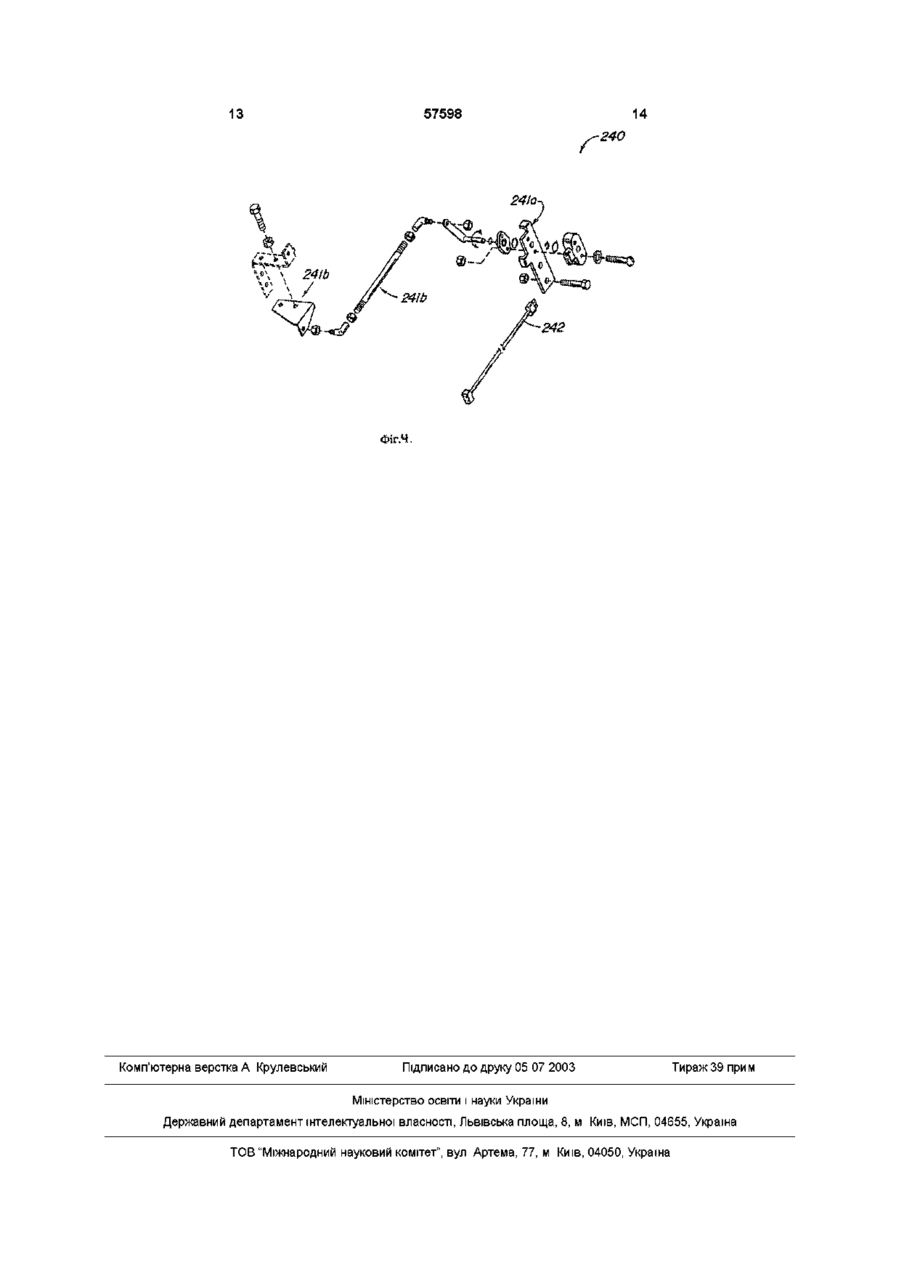
1 Система регулювання підйому робочих інструментів сільськогосподарського знаряддя, що включає поперечну раму для кріплення інструментів з передньою і задньою частинами, пристосованого для руху уперед по поверхні землі за допомогою буксирувального транспорту і забезпеченому множиною поперечно розміщених підіймальних вузлів для підняття і опускання рами відносно землі, в якому система регулювання підйому містить гідравлічні циліндри, з'єднані з підіймальними вузлами, і вузол регулювальних клапанів, сполучений з гідравлічними циліндрами і з джерелом гідравлічної рідини під тиском, з вибірковою дією регулювальних клапанів для висунення і втягування гідравлічних циліндрів підіймальних вузлів підняття і опускання рами, яка відрізняється тим, що вона забезпечена перетворювальними елементами, що реагують на спрацювання підіймальних вузлів і що виробляють ВИХІДНІ сигнали в залежності від положення рами, і електронним блоком управління, сполученим з системою регулювальних клапанів і перетворювачами і чутливим до вихідних сигналів перетворювача, що забезпечує можливість роздільного впливання на гідравлічні циліндри для приведення рами в задане положення відносно землі 2 Система регулювання підйому по п 1, яка відрізняється тим, що блок регулювальних клапанів включає електрогідравлічний клапан, встановлений між джерелом тиску і кожним з циліндрів 3 Система регулювання підйому по п 2, яка від різняється тим, що електрогідравлічний клапан являє собою двопозиційний клапан 4 Система регулювання підйому по п 2, яка відрізняється тим, що електрогідравлічний клапан являє собою пропорційний клапан для регулювання потоку рідини в залежності від вихідних сигналів перетворювачів 5 Система регулювання підйому по п 1, яка відрізняється тим, що перетворювальні елементи включають перетворювач, що виробляє напруження в залежності від величини висунення циліндра 6 Система регулювання підйому по п 1, яка відрізняється тим, що перетворювальні елементи включають перетворювач, що виробляє напруження в залежності від розташування частини підіймальних вузлів 7 Система регулювання підйому по п 1, яка відрізняється тим, що блок управління включає регулювальний орган зміщення для підтримки вибраних частин рами в різних положеннях один О ВІДНОСНО ОДНОГО 8 Система регулювання підйому по п 7, яка відрізняється тим, що підіймальні вузли включають перший і другий підіймальні вузли, розміщені спереду і позаду, а регулювальний орган зміщення забезпечує регулювання передньої частини рами відносно задньої частини 9 Система регулювання підйому по п 7, яка відрізняється тим, що рама включає центральну секцію і флангову секцію, приєднані до центральної секції з можливістю повороту, а регулювальний орган зміщення настроєний таким чином, щоб змінювати робоче заглиблення флангової секції 10 Система регулювання підйому по п 7, яка відрізняється тим, що вона включає регулювальний орган нахилу для регулювання передньої частини рами відносно задньої частини рами 11 Система регулювання підйому по п 1, яка відрізняється тим, що вона включає перший регулювальний орган заглиблення і проміжний регулювальний орган заглиблення, де перший регулювальний орган заглиблення призначений для вибору нормального робочого заглиблення, а проміжний регулювальний орган заглиблення призначений для вибору другого зміщення заглиблення від нормального робочого заглиблення 00 ю ю 57598 12 Система регулювання підйому по п 1, яка відрізняється тим, що регулювальні органи заглиблення мають фіксовані положення 13 Система регулювання підйому по п 10, яка відрізняється тим, що вона включає регулювальний орган рівня для регулювання рівня однієї з сторін рами відносно протилежної сторони рами 14 Система регулювання підйому по п 1, яка відрізняється тим, що вона включає регулювальний орган нахилу для зміни глибини заглиблення інструментів, що підтримуються передньою частиною, відносно глибини заглиблення інструментів, що підтримуються задньою частиною 15 Система регулювання підйому по п 1, яка відрізняється тим, що вона включає регулювальний орган прив'язки до нуля для установки еталонного рівня глибини заглиблення інструментів, встановлених на рамі 16 Система регулювання підйому по п 1, яка відрізняється тим, що вона включає регулювальний орган прив'язки до рівня для установки горизонтального положення рами 17 Система регулювання підйому по п 16, яка відрізняється тим, що вона включає операторський регулювальний орган для установки положення, зміщеного від горизонтального положення рами 18 Система регулювання підйому робочих інструментів сільськогосподарського знаряддя, пристосованого для руху уперед по поверхні землі і що включає поперечну раму, підтримуючу ґрунтообробні інструменти, і підіймальні вузли, встановлені на рамі, і вибірково переміщувані для підняття і опускання інструментів між піднятими транспортними положеннями і опущеними робочими положеннями, а також для зміни положення ґрунтообробних інструментів, коли ґрунтообробні інструменти знаходяться в робочому положенні, де підіймальні вузли включають окремі гідравлічні 19 Система регулювання підйому по п 18, яка відрізняється тим, що ОБУ включає регулювальний орган прив'язки до рівня для передачі на БУЗ сигналу еталонного рівня, а також включає регулювальний орган зміщення для регулювання вертикального положення поперечно розміщених інструментів відносно положення інструментів на еталонному рівні 20 Система регулювання підйому по п 18, яка відрізняється тим, що підіймальні вузли зміщені в подовжньому напрямі один відносно одного, а також включає регулювальний орган нахилу, що передає на БУЗ сигнал зміщення для виборчої зміни регулювання окремих циліндрів з метою нахилу інструментів в подовжньому напрямі Даний винахід відноситься до сільськогосподарських знарядь, зокрема до систем регулювання підйому і заглиблення робочих інструментів таких знарядь У більшості застосованих багаторамних знарядь, таких як польові культиватори і розпушувачі, використовуються гідравлічні системи циліндрів, що забезпечують регулювання заглиблення під час польових операцій і ВІДПОВІДНИЙ дорожній просвіт при транспортуванні Деякі системи регулювання заглиблення, подібні представленим в патенті США 3,663,032, використовують циліндри зміни фаз, з'єднані послідовно, для того щоб узгоджено підіймати і опускати рами Для правильної роботи циліндрів, як правило, повинні бути ретельно підібрані об'єми циліндрів і довжина ходу поршня Крім того, витік через ущільнення поршня одного або декількох циліндрів викликає вихід циліндра з фази, що приводить до нерівномірної роботи по ширині машини Щоб змінити фазу циліндрів, машину, як правило, потрібно повністю підняти, що приводить до втрати часу і продуктивності Інші системи засновані на використанні механічних стопорів заглиблення для регулювання робочої висоти, але вони не дозволяють оператору змінювати цю висоту з кабіни або легко варіювати висоту для різних транспортних умов, рельєфу поверхні землі і ґрунтових умов Крім того, ПОСЛІДОВНІ циліндри і системи механічних стопорів заглиблення вимагають механічної настройки зовні кабіни, щоб відрегулювати висоту флангових рам відносно головної або центральної рами Проблематично також регулювання рівня, як при подовжньому вирівнюванні або нахилі, так і при поперечному вирівнюванні Для рамних знарядь, що мають головну раму і окремі флангові рами, глибина заглиблення флангових секцій часто відрізняється від глибини заглиблення головної рами, але пристрій, що використовує циліндри, не в змозі забезпечити легке і надійне підстроювання флангових секцій відносно головної рами Довжина ходу поршня і розмір ци циліндри, в якому система регулювання підйому містить блок електрогідравлічних клапанів, сполучений з гідравлічними циліндрами, і джерело гідравлічної рідини під тиском, що вибірково приєднується до блока електрогідравлічних клапанів, яка відрізняється тим, що вона забезпечена перетворювальними елементами, зв'язаними з циліндрами і виробляючими перетворювальні сигнали в залежності від положення кожного з підіймальних вузлів, операторський блок управління (ОБУ) для виробки сигналів бажаних положень, блок управління знаряддям (БУЗ), який містить введення, сполучені з перетворювачами і з ОБУ, і відведення, з'єднані з блоком електрогідравлічних клапанів, де БУЗ чутливий до сигналів перетворювача і сигналів бажаних положень для регулювання стану клапанів, що дає можливість роздільно регулювати гідравлічні циліндри і підтримувати інструменти в бажаних положеннях відносно землі, і де ОБУ включає регулювальні органи для виборчої зміни положення інструментів, суміжних з одним з підіймальних вузлів, незалежно від положення інструментів, суміжних з іншими підіймальними вузлами 57598 ліндрів флангових секцій ІНОДІ визначається швидше умовами ВІДПОВІДНОСТІ циліндрів розмірам гідравлічної системи, чим міркуваннями підіймальної сили і площі, тому системи циліндрів не є оптимальними або найбільш економічними Таким чином, задачею даного винаходу є створення вдосконаленої системи регулювання підйому або заглиблення знаряддя Іншою задачею є створення такої вдосконаленої системи, в якій усунені всі або більшість вищезазначених недоліків Наступною задачею даного винаходу є створення вдосконаленої системи регулювання підйому або заглиблення знаряддя, яка забезпечує точне регулювання заглиблення по всій ширині машини Наступною задачею є створення такої системи, якій не потрібно використання обладнання для зміни фаз і механічних стопорів і яке забезпечує регулювання навіть у разі витоку з циліндрів Наступною задачею є створення такої системи, яка може легко управлятися і настроюватися з кабіни буксируючого транспорту Наступною задачею даного винаходу є створення вдосконаленої системи регулювання підйому або заглиблення знаряддя, яка має значно більшу гнучкість і пристосованість, чим принаймні більшість відомих систем регулювання Наступною задачею є створення такої системи, в якій можуть бути використані циліндри різних розмірів і з різною довжиною ходу поршня при оптимізацм вибору циліндрів Наступною задачею даного винаходу є створення вдосконаленої системи регулювання підйому або заглиблення знаряддя, яка допускає різне регулювання окремих частин рами знаряддя, наприклад, флангової секції і центральної секції рами Наступною задачею є створення системи, що забезпечує легку відносну настройку підіймальних циліндрів Наступною задачею даного винаходу є створення вдосконаленої системи регулювання підйому знаряддя, що має незалежно регульовані підіймальні циліндри, які настроюються один відносно одного з кабіни трактора, і яка не вимагає використання механічних стопорів, точного підбору циліндрів або застосування систем зміни фаз, і в той же час забезпечує однакову підіймальну силу Наступною задачею є створення системи, яка особливо ефективна для знарядь з фланговими секціями з регулюванням флангових секцій відносно головної рами Наступною задачею є створення системи, яка може точно регулювати підйом рами як в подовжньому так і в поперечному напрямі Система підйому знаряддя включає множину окремих електрогідравлічних регульованих циліндрів, розміщених на рамі інструмента і сполучених з конструкцією ПІДВІСКИ рами, наприклад, колісними вузлами Блок управління знаряддям (БУЗ) в кабіні буксирувального транспорту сполучений з потенціометрами зворотного зв'язку або подібними перетворювачами, які виробляють сигнали, ВІДПОВІДНІ величині ходу поршня циліндра або положенню ПІДВІСКИ Сигнали зворотного зв'язку порівнюються в БУЗ з контрольними сигналами, що виробляються шляхом обертання важеля або рукоятки регулятора на блоці управління оператора в кабіні У залежності від положення циліндра відносно положення, вибраного оператором, БУЗ видає вихідний сигнал на електрогідравлічний клапан, щоб забезпечити пропорційну КІЛЬКІСТЬ гідравлічної рідини для бажаного положення циліндра БУЗ також порівнює сигнали зворотного зв'язку з перетворювача і регулює вихідне напруження для кожного клапана таким чином, що рама може підійматися і опускатися рівномірно У умовах, коли бажане незалежне регулювання різних частин рами, блок управління оператора може бути настроєний на виробку необхідних сигналів зміщення для кожної секції Система підйому забезпечує рівномірний контроль заглиблення і однаковий підйом, навіть при різних об'ємах циліндрів і довжині ходу поршня циліндрів Однаковий підйом і контроль заглиблення може бути досягнутий і в подовжньому і в поперечному напрямі Ці І ІНШІ ЦІЛІ, ВІДМІТНІ особливості і переваги даного винаходу будуть очевидні досвідченому фахівцю при розгляді приведеного нижче докладного опису з ВІДПОВІДНИМИ малюнками Короткий опис малюнків Фіг 1 - вигляд зверху частини рами ґрунтообробного знаряддя з підіймальною системою Фіг 2 - схема підіймальної системи по Фіг 1 Фіг 3 - схематичне представлення альтернативного клапана для використання в ланцюгу по Фіг 2 Фіг 4 - трьохмірне зображення компонування зв'язку, включаючи перетворювач для використання в системі по Фіг 1 Докладний опис малюнків На Фіг 1 позицією 8 показане знаряддя з ґрунтообробними інструментами 10, що утримуються на поперечній рамі 12 Рама 12 включає центральну раму або секцію 16 і флангові секції 18 і 20, приєднані з можливістю повороту на шарнірних дільницях 21 відносно центральної секції 16 навколо подовжніх осей Перший і другий підіймальні вузли центральної рами 22 і 24 приєднані до передньої частини 16f секції 16, а задні підіймальні вузли центральної секції 26 і 28 приєднані до задньої частини 16а секції 16 Флангові секції 18 і 20 включають передні флангові підіймальні вузли ЗО і 32, з'єднані з передніми частинами 18f і 20f, ВІДПОВІДНО Задні флангові підіймальні вузли 34 і 36 з'єднані із задніми частинами 18а і 20а Вузол зачеплення 40 прикріплений з можливістю повороту до передньої частини 16f для приєднання до трактора (не показаний), що буксирує знаряддя 10 уперед (F) по полю Підіймальні вузли 22, 24, 26 і 28 включають циліндри подвійної дії 42, 44, 46 і 48, з'єднані з опорними важелями коліс 52, 54, 56 і 58, ВІДПОВІДНО, ЯКІ прикріплені до центральної рами 16 з можливістю повороту Підіймальні вузли ЗО, 32, 34 і 36 включають циліндри 60, 62, 64 і 66, з'єднані з опорними важелями коліс 70, 72, 74 і 76, ВІДПОВІДНО, ЯКІ прикріплені з можливістю повороту до флангових секцій 18 і 20 Коли циліндри висунені, ВІДПОВІДНІ частині рам підіймаються відносно землі При втягуванні циліндрів ці частини опускаються відносно землі Підіймальні вузли переміщують раму 12 між піднятим положенням транспортування, коли ш 57598 струменти 10 ПІДНЯТІ на значну відстань над землею, і опущеним робочим положенням, коли інструменти 10 заглиблені в землю У робочому положенні циліндри колісних вузлів можуть висуватися або втягуватися, регулюючи глибину заглиблення інструментів 10 від самого високого положення знімання дерну до самого глибокого положення оранки Циліндри колісних вузлів можуть регулюватися в будь-якому положенні рами, щоб змінювати положення флангових секцій відносно положення центральної секції 16 і щоб вирівнювати раму або змінювати бічний і подовжній крен секцій На Фіг 2 показана система регулювання підйому 90 для знаряддя 8 Система 90 включає окремі електрогідравлічні регулювальні клапани 142, 144, 146 і 148, які з'єднані з циліндрами підіймальних вузлів 42, 44, 46 і 48 для управління циліндрами центральної секції 16 з метою регулювання положення центральної секції 16 відносно землі Електрогідравлічні клапани 160, 162, 164 і 166 з'єднані з циліндрами 60, 62, 64 і 66 для управління циліндрами флангових секцій з метою регулювання положення флангових секцій 18 і 20 відносно землі Як показано на Фіг 2, клапани являють собою трипозиційні, чотириходові пдророзподілювачі, що мають випускні канали 168а і 168Ь, які зв'язані з штоковим і базовим частинами ВІДПОВІДНОГО циліндра Впускні канали 169а і 169Ь через клапан селективного регулювання (КСР) 200 з'єднані з джерелом напірної гідравлічної рідини 202 на буксирувальному транспорті Джерело 202 включає напірну ЛІНІЮ 204 від насоса і картер 206 Канал 169Ь кожного з клапанів 142 -148 і 160 -166 введений в картер 206 Канали 196Ь з'єднані з ЛІНІЄЮ 204 через КСР 200 У конструкції КСР переважно використовують модуль (RE67869) для тракторів John Deere серії, що серійно випускаються 8000 Кожний з електрогідравлічних регулювальних клапанів 142 - 148 і 160 - 166 включає керуючий термінал 220, сполучений з окремим вихідним терміналом 222 блоку управління знаряддя (БУЗ) 230 БУЗ 230 видає окремий керуючий сигнал на кожний з клапанів для управління ВІДПОВІДНИМ циліндром Сигнал підйому на терміналі 220 буде переміщувати клапан з нейтральної позиції, показаної на Фіг 2, вправо, створить тиск у базовому КІНЦІ циліндра через ЛІНІЮ 168Ь І ДІЄ на поршень так, що шток циліндра висувається і тим самим забезпечується підйом ВІДПОВІДНИМ підіймальним вузлом відповідної частини рами 12 відносно землі Сигнал опускання на терміналі 220 буде переміщувати клапан в протилежне положення, створюючи тиск у штоковому КІНЦІ циліндра через ЛІНІЮ 168Ь і діючи поршень так, що він втягується і тим самим забезпечується опускання ВІДПОВІДНИМ підіймальним вузлом відповідної частини рами 12 відносно землі У відсутність сигналу підйому або опускання на керуючому терміналі 220 клапан залишається в нейтральному положенні, як показаний на малюнку, втримуючи шток в заданому положенні, який, в свою чергу, втримує секцію рами в одному і тому ж положенні відносно землі Як показано на Фіг 2, клапани включаються і вимикаються, забезпечуючи необхідний гідравлічний по 8 тік до ВІДПОВІДНИХ циліндрів для досягнення бажаної позиції циліндра Однак для варіювання потоку до кожного циліндра і від нього і для досягнення бажаної позиції циліндра можуть також використовуватися пропорційні клапани, такі як клапан, позначений позицією 160р на Фіг 3 Потік рідини до кожного циліндра може регулюватися пропорційно різниці між дійсним положенням, що спостерігається, і бажаним положенням колісного вузла Пропорційний клапан 160р забезпечує більш плавну роботу, ніж конструкція двопозиційного клапана 160, показаного на Фіг 2 Перетворювач або потенціометр зворотного зв'язку 240 (Фіг 2 і 4) пов'язаний з кожним з підіймальних вузлів 22 - 28 і ЗО - 36 і забезпечує напруження зворотного зв'язку V1, яке відповідає довжині ходу поршня циліндра або положенню підіймального вузла, що приводиться в дію циліндром Перетворювач 240 включає основу перетворювача 241а, жорстко прикріплену до частини рами, і зв'язуючу дільницю 241Ь, призначену для переміщення разом з підіймальним вузлом і чутливу до висунення і втягування ВІДПОВІДНОГО підіймального циліндра Кожний перетворювач 240 через ЛІНІЮ 242 сполучений з окремим вхідним терміналом 222 на БУЗ 230 БУЗ переважно відноситься до того типу контролерів, які використовують з вищезазначеним зачепленням/КСРконтролером, серійно застосовуваним на тракторах John Deere серп 8000, і модифікованим таким чином, щоб прочитувати додаткову аналогову вхідну інформацію з перетворювачів 240 для регулювання окремих підіймальних циліндрів Крім того, пдророзподілювальні керуючі сигнали передаються з БУЗ через ЛІНІЮ 243 на блок селективного регулювання КСР 200 Управління КСР 200 здійснюють за допомогою БУЗ, а також звичайних пристроїв настройки 200с і стандартного важеля КСР 200d БУЗ порівнює напруження V1 на лінії 242 з перетворювача 240 для кожного підіймального вузла з бажаним напруженням сигналу V2 для цього підіймального вузла БУЗ також порівнює напруження сигналу для кожного підіймального вузла з напруженням сигналу інших підіймальних вузлів, щоб рівномірно підіймати і опускати машину і забезпечувати будь-які бажані функції вирівнювання і нахилу Бажане напруження сигналу виробляється за допомогою БУЗ 230 з операторського блоку управління (ОБУ) 250 в кабіні трактора через лінії 250с і за допомогою регулювального органу подовжнього нахилу 260, з'єднаного через ЛІНІЮ 260С з БУЗ ОБУ 250 включає регулювальний орган прив'язки до рівня 251 і регулювальний орган прив'язки до нуля 252 Регулювальний орган заглиблення 253 і регулювальний орган проміжного заглиблення 254 регулюють робочу глибину заглиблення в робочих умовах Регулювальний орган зміщення правого флангу 255 і регулювальний орган зміщення лівого флангу 256 полегшують регулювання флангів 18 і 20 відносно центральної рами 16 Регулювальний орган центрального рівня 257 регулює висоту лівої сторони центральної рами відносно правої сторони рами 16 Перемикач дозволу/заборони 258 полегшує повернення позицій в початкове положення Цифровий прочитую 57598 чий пристрій 259 забезпечує індикацію заглиблення, вибраного регулювальним органом 253 Регулювальні органи заглиблення переважно включають ЗМІННІ резистори з поворотними рукоятками, які мають фіксовані положення для різних робочих умов і для зручного повернення на заздалегідь вибрані установки рівня після використання функції регулювання зміщення Регулювальний орган нахилу 260 виробляє напруження зміщення для бажаного положення передніх колісних вузлів відносно задніх колісних вузлів з метою легкого регулювання подовжнього нахилу рами 12 Наприклад, може бути бажано, щоб передні інструменти 10 працювали на ІНШІЙ глибині, ніж задні інструменти, особливо, коли спереду і позаду знаряддя встановлені різні комплекти інструментів Нахил також може бути бажаний під час транспортування для кращого дорожнього просвіту Може бути приведений в дію проміжний регулювальний орган 254, що переміщує раму 12 в положення, в якому інструменти 10 стикаються лише з поверхнею грунту, наприклад, для видалення СЛІДІВ шин, без глибокої оранки, або при повороті, коли інструменти 10 не повинні повністю відриватися від землі Проміжний регулювальний орган також корисний в тому випадку, коли знаряддя пересувається по нерівному рельєфу, наприклад, через яри або водотоки Під час роботи, після того як оператор прикріпив знаряддя 8 до трактора і приєднав гідравлічні лінії між знаряддям і трактором, приводиться вдію схема КСР і знаряддя виводиться на горизонтальну поверхню Важіль КСР пересувається в положення, що підіймає диски від землі, а потім важіль переводиться в плаваюче положення, так щоб дискові вузли стикалися з поверхнею землі Потім оператор натискає регулювальний орган прив'язки до рівня 251, щоб встановити еталонні рівні напруження від перетворювачів 240, ВІДПОВІДНІ еталонному положенню рівня Після ЦЬОГО знаряддя підіймається і буксирується до поля, де рама 12 опускається, поки інструменти 10 не увійдуть в контакт з поверхнею Натискається регулювальний орган прив'язки до нуля 252, щоб встановити нульовий еталонний рівень для конкретних польових умов Потім оператор повертає рукоятку регулювального органу заглиблення 253 доти, поки цифровий прочитуючий пристрій 259 не покаже бажану робочу глибину Спочатку зміщення правого і лівого флангів 255 і 256 і регулювального органу центрального рівня 257 встановлюються в фіксовані положення для роботи на заданому рівні Приводиться в дію важіль КСР, і КОЛІСНІ вузли знаряддя опускають раму 12 під управлінням БУЗ 230 БУЗ отримує сигнали напруження від перетворювача і управляє окремими електрогідравлічними клапанами, щоб втягнути циліндри, забезпе 10 чуючи пониження рівня Коли знаряддя 8 працює на полі, регулювальні органи флангів 255 і 256 можуть бути здвинуті зі своїх зафіксованих положень, щоб виробити напруження зміщення для підняття або опускання флангових секцій 18 або 20 незалежно від центральної секції 16, з метою поліпшення регулювання рівня Якщо по якійнебудь причині одна сторона центральної секції 16 працює на іншому рівні, ніж протилежна сторона, може бути переміщений регулювальний орган рівня 257, щоб виробити напруження зміщення для зміни положень колісних вузлів 22, 46 відносно вузлів 24, 48 в напрямі, що вирівнює секцію Якщо оператор бажає змінити робочу глибину задніх інструментів 10 відносно передніх інструментів 10, він просто використовує регулювальний орган 260, щоб виробити напруження зміщення для перетворювачів 240 для передніх колісних вузлів 22, 24, ЗО, 32 відносно перетворювачів для задніх вузлів 26, 28, 34, 36 Якщо бажана проміжна настройка заглиблення, наприклад, під час поворотів або при проходженні водотока, оператор просто вводить в дію регулювальний орган проміжного заглиблення 254 Для регулювальних органів заглиблення 253 і 254 також може бути передбачено декілька фіксованих положень для установки легко вибираних робочих глибин при різних умовах Щоб підняти знаряддя 8, оператор вибирає функцію підйому на КСР 200, і система зворотного зв'язку забезпечує висунення циліндрів погоджено один з одним для підйому знаряддя в горизонтальне положення У піднятому положенні може бути використаний регулювальний орган нахилу 260 для поліпшення стабільності і дорожнього просвіту при транспортуванні Регулювальний орган дозволу/заборони 258 забезпечує скидання еталонного рівня і його перевизначення для нормальної роботи КСР без регулювальних органів заглиблення і зміщення Хоч на малюнку показані ВІСІМ КОЛІСНИХ вузлів, дана система може використовуватися з різною КІЛЬКІСТЮ колісних вузлів і циліндрів Наприклад, для деяких знарядь може бути бажано мати тільки пару колісних вузлів на центральній рамі 16 і один колісний вузол на кожному фланзі Крім того, якщо не потрібно регулювання подовжнього нахилу з кабіни трактора, то можуть використовуватися механічні зв'язки для управління вузлом задніх коліс з вузла передніх коліс БУЗ 230 і перетворювачі 220 легко можуть пристосовуватися під різні циліндри з різною довжиною ходу поршня і різні підіймальні КОЛІСНІ вузли З опису переважного варіанту здійснення винаходу очевидно, що в ньому можуть бути виконані різні модифікації, не відступаючі від принципів винаходу, які визначаються приведеною нижче формулою винаходу Фіг. 2О6 12 57598 11 1 • І69а 243 25! т т X Фіг. З 258^252 ф і г 2 57598 13 14 -240 241а Фіг.Ч. Комп'ютерна верстка А Крулевський Підписано до друку 05 07 2003 Тираж39 прим Міністерство освіти і науки України Державний департамент інтелектуальної власності, Львівська площа, 8, м Київ, МСП, 04655, Україна ТОВ "Міжнародний науковий комітет", вул Артема, 77, м Київ, 04050, Україна
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem to regulate raising working tools of an agricultural implement
Назва патенту російськоюСистема регулирования подъема рабочих инструментов сельскохозяйственного орудия
МПК / Мітки
МПК: A01B 63/00, A01B 63/10
Мітки: інструментів, знаряддя, підйому, робочих, сільськогосподарського, система, регулювання
Код посилання
<a href="https://ua.patents.su/7-57598-sistema-regulyuvannya-pidjjomu-robochikh-instrumentiv-silskogospodarskogo-znaryaddya.html" target="_blank" rel="follow" title="База патентів України">Система регулювання підйому робочих інструментів сільськогосподарського знаряддя</a>
Зубець для сільськогосподарського землеобробного знаряддя та сільськогосподарська машина
Номер патенту: 46096
Опубліковано: 15.05.2002
Автор: Шевеланн Магне
МПК: A01B 35/24
Мітки: машина, сільськогосподарського, зубець, знаряддя, землеобробного, сільськогосподарська
Формула / Реферат:
1. Зубець (100) для сільськогосподарського землеобробного знаряддя (20), який має монтажну частину (120) на верхньому кінці зубця для монтажу зубця консольно на частині рами знаряддя, стрижневу частину (101), що простягається донизу від монтажної частини (120), який відрізняється тим, що має наконечник (106) зубця, змонтований на нижньому кінці стрижневої частини (101), причому наконечник (106) зубця має розрізаючий ніж (107), який...
Спосіб та система підйому об’єкта, що знаходиться під водою
Номер патенту: 51882
Опубліковано: 16.12.2002
Автор: Міндолін Сергій Олександрович
МПК: B63C 7/00, B63C 7/04, B63C 7/06
Мітки: підйому, знаходиться, система, об'єкта, спосіб, водою
Формула / Реферат:
1. Спосіб підйому об'єкта, що знаходиться під водою, який полягає в створенні підіймальної сили за допомогою принаймні одного основного плавучого підйомного засобу, з'єднаного принаймні одним силовим зв'язком з об'єктом, що знаходиться під водою, та принаймні одного додаткового відривного підводного підйомного засобу, з'єднаного принаймні одним силовим зв'язком з об'єктом, що знаходиться під водою, або з основним плавучим підйомним засобом,...
Система для підйому затонулих суден
Номер патенту: 13095
Опубліковано: 28.02.1997
Автор: Філіпчук Степан Павлович
МПК: B63C 7/08
Мітки: підйому, система, затонулих, суден
Формула / Реферат:
(57) 1. Система для подъема затонувших судов, содержащая самоходный понтон с грузозахватными органами для взаимодействия с затонувшим судном, выполненными с возможностью изменения своей длины и расположенными попарно на бортах корпуса понтона, отличающаяся тем, что каждый грузозахватный орган выполнен в виде телескопической балки и гибкого элемента, который кинематически связан с последней посредством зубчато-реечной передачи и выполнен с...
Спосіб регулювання профілю робочих валків безперервного тонколистового стану гарячої прокатки
Номер патенту: 32161
Опубліковано: 15.12.2000
Автори: Путнокі Олександр Юліусович, Мовшович Вілорд Соломонович, Яланський Вячеслав Петрович, Штехно Олег Миколайович, Піховкін Микола Миколайович, Тилик Василь Трохимович, Коваль Сергій Миколайович, Солтан Станіслав Леонідович
МПК: B21B 37/00
Мітки: профілю, тонколистового, валків, прокатки, робочих, спосіб, регулювання, гарячої, стану, безперервного
Текст:
...я клітей зусилля противигину досягло граничного значення І у регулюванні приймають участь дві КЛІТІ , то кожна з них відпрацьовує 1/2 відхилення. Необхідна величина зміни зусилля противигину у останньої КЛІТІ Є наймень-шою, що дозволяє використовувати у кожному відокремленому циклі регулюванню найменьшу частину обмеженого діапазону регулювання противигину, а це дає можливість найбільш раціонально використовувати ресурс найбільш елективної у...
Спосіб регулювання тиску в робочих просторах печей двухванного агрегату з одним спільним вертикалом
Номер патенту: 1391
Опубліковано: 25.03.1994
Автори: Дорофєєв Володимир Миколайович, Фролов Володимир Миколайович, Кущенко Олександр Іванович, Дворядкін Борис Олександрович, Соломін Геннадій Васильович, Петров Олександр Володимирович, Скороход Микола Михайлович, Поживанов Олесандр Михайлович
МПК: F27B 3/00
Мітки: тиску, спільним, двухванного, спосіб, агрегату, одним, печей, вертикалом, просторах, регулювання, робочих
Формула / Реферат:
Способ регулирования давления в рабочих пространствах печей двухванного агрегата с одним общим вертикалом. преимущественно с горелкой, установленной по оси вертикала, включающий измерение давлений в плавильных ваннах, изменение расхода газа через горелку, отличающийся тем, что определяют разность /, / между...
Попередній патент: Пристрій гідроударний двосторонній
Наступний патент: Комплекс кобальту (ііі) з полідентатними основами шифу , що має протипухлинну активність
Випадковий патент: Біологічно активний засіб, який має адаптогенну властивість