Планування, основане на діючому цільовому навантаженні, із заглушенням взаємних перешкод у системі бездротового зв’язку
Номер патенту: 100246
Опубліковано: 10.12.2012
Автори: Самбхвані Шарад Діпек, Моханті Бібху, Чжан Даньлу

Формула / Реферат
1. Спосіб бездротового зв'язку, який полягає в тому, що:
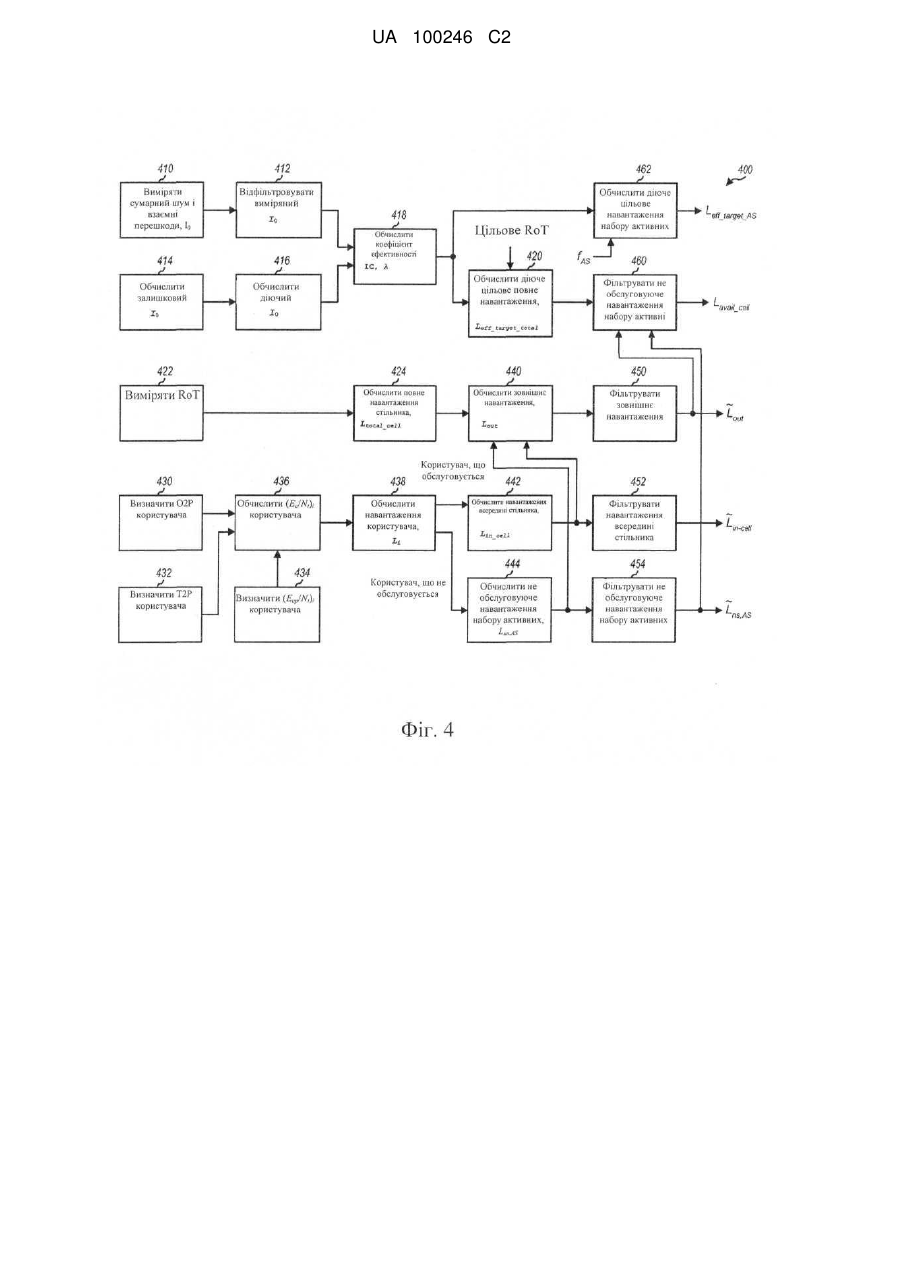
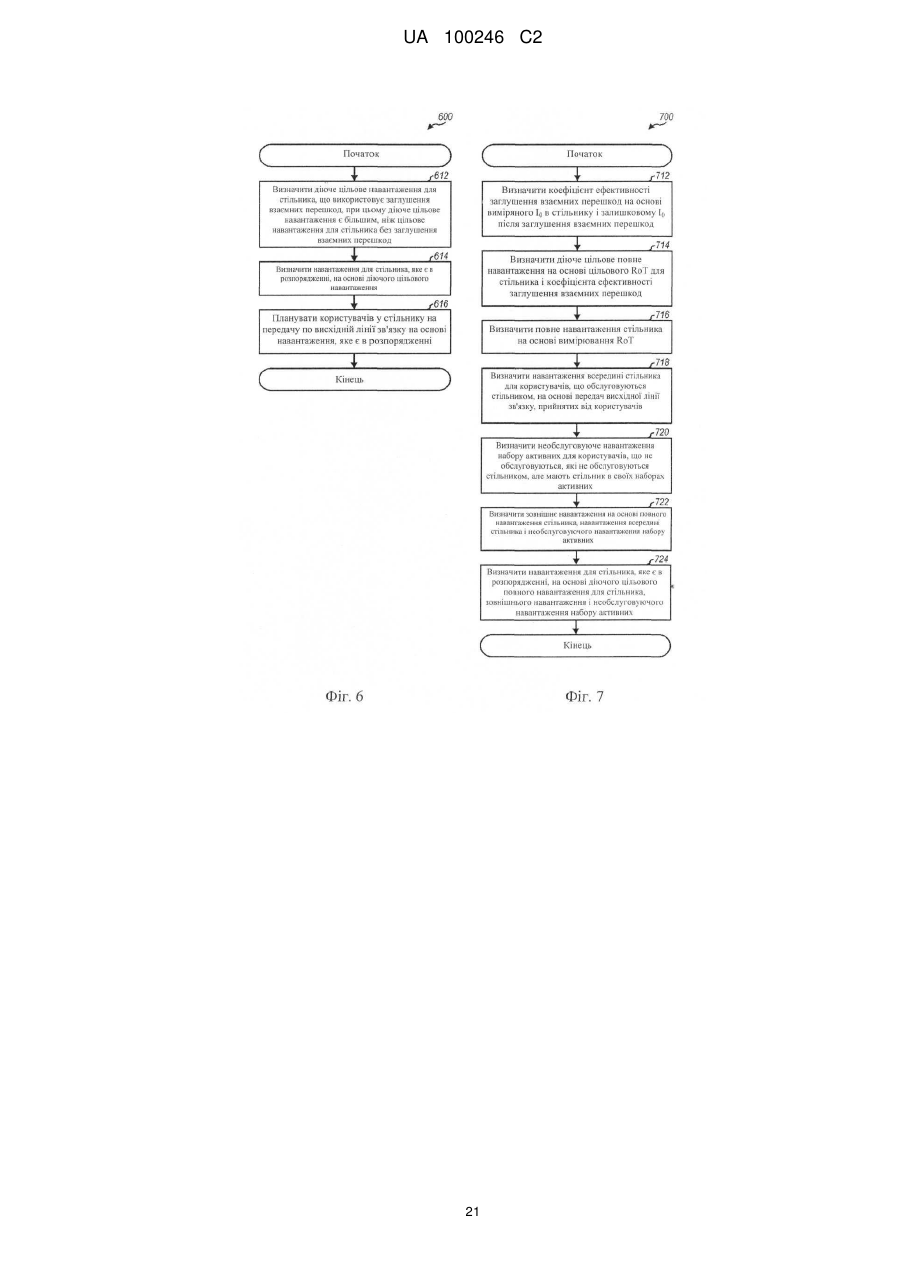
визначають діюче цільове навантаження для стільника, що використовує заглушення взаємних перешкод, при цьому діюче цільове навантаження є вищим, ніж цільове навантаження для згаданого стільника без заглушення взаємних перешкод;
визначають навантаження для згаданого стільника, що є в розпорядженні, на основі діючого цільового навантаження; і
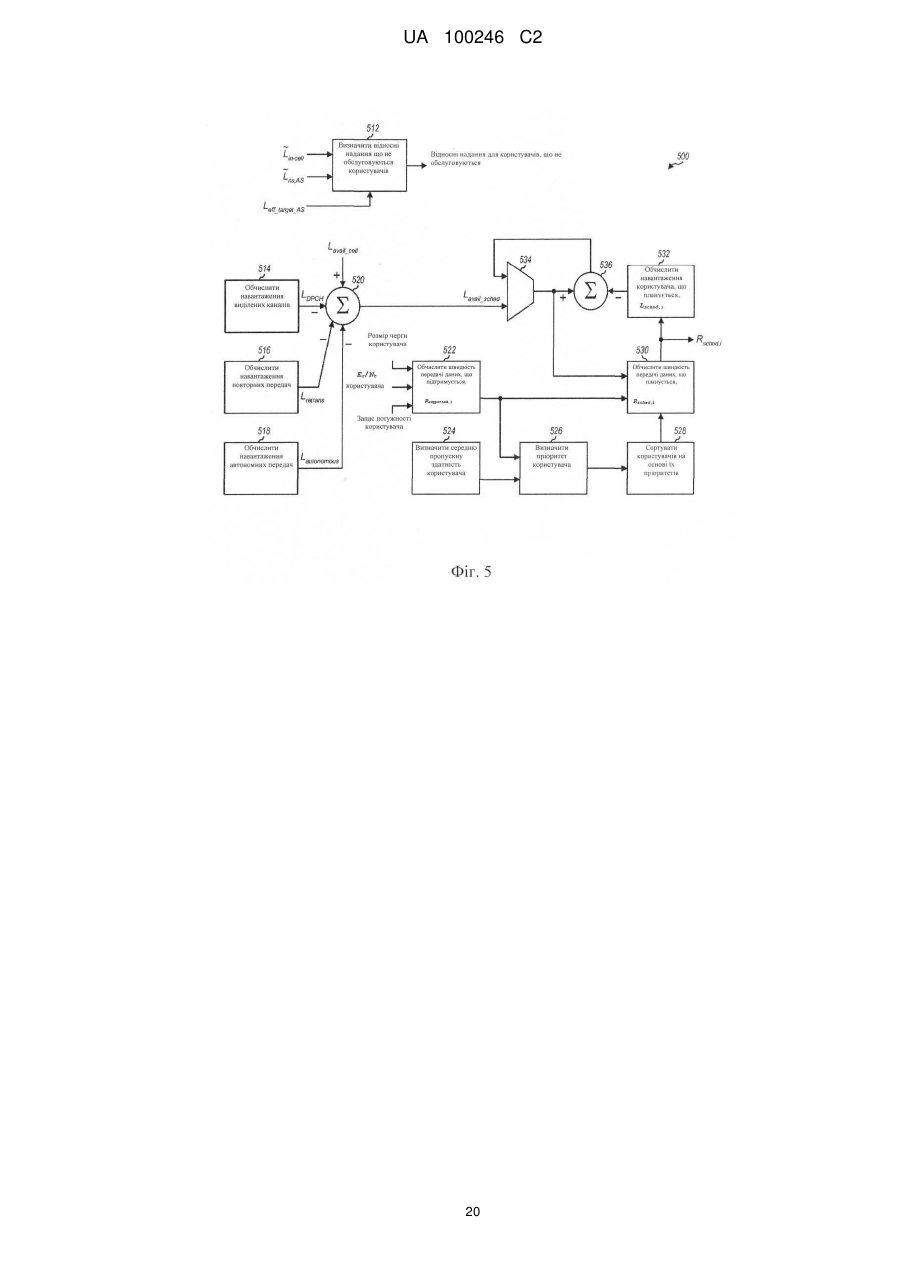
планують користувачів в згаданому стільнику на передачу по висхідній лінії зв'язку на основі навантаження, що є в розпорядженні,
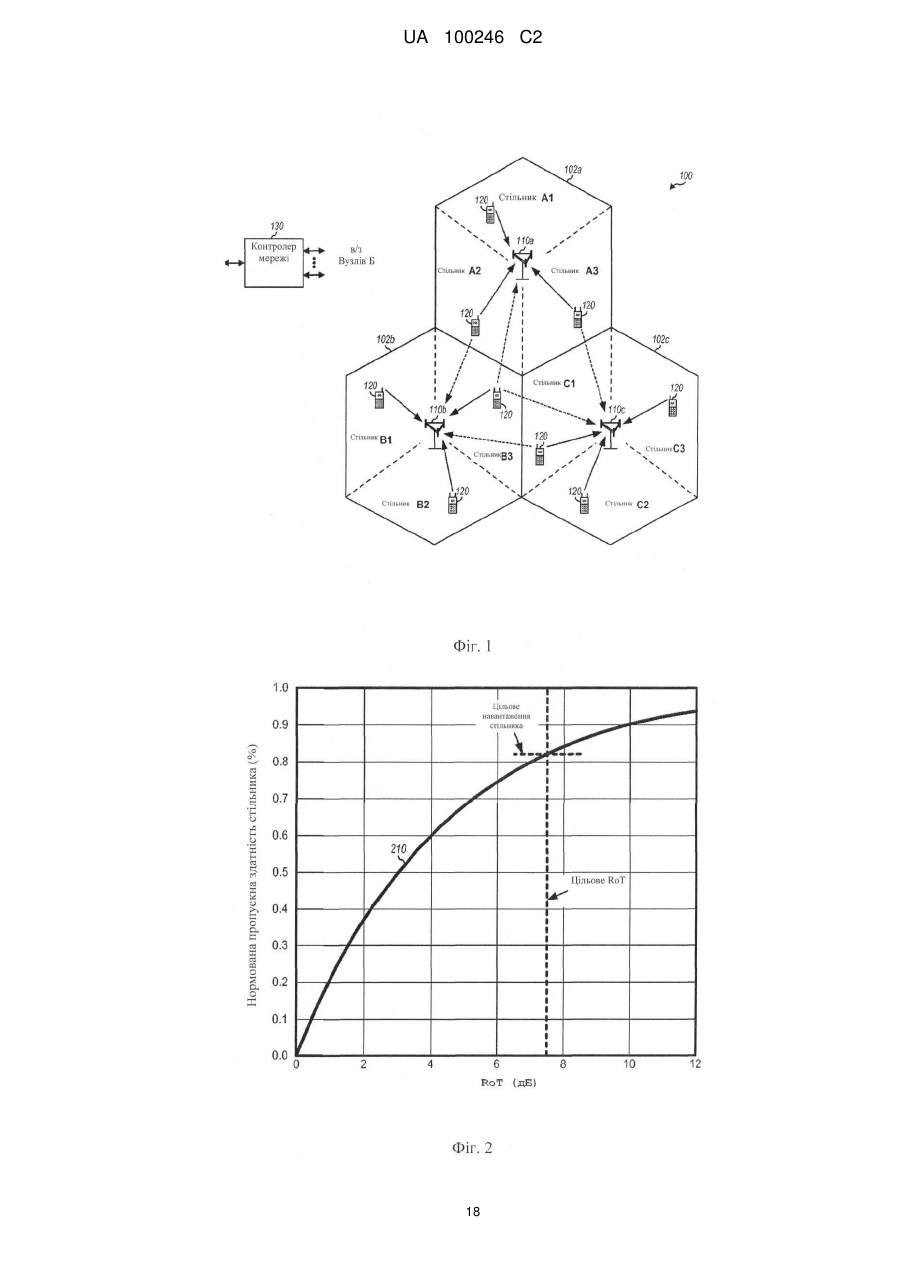
причому визначення діючого цільового навантаження полягає в тому, що визначають діюче цільове навантаження на основі цільового перевищення рівня теплового шуму (RoT) для згаданого стільника і коефіцієнта ефективності заглушення взаємних перешкод.
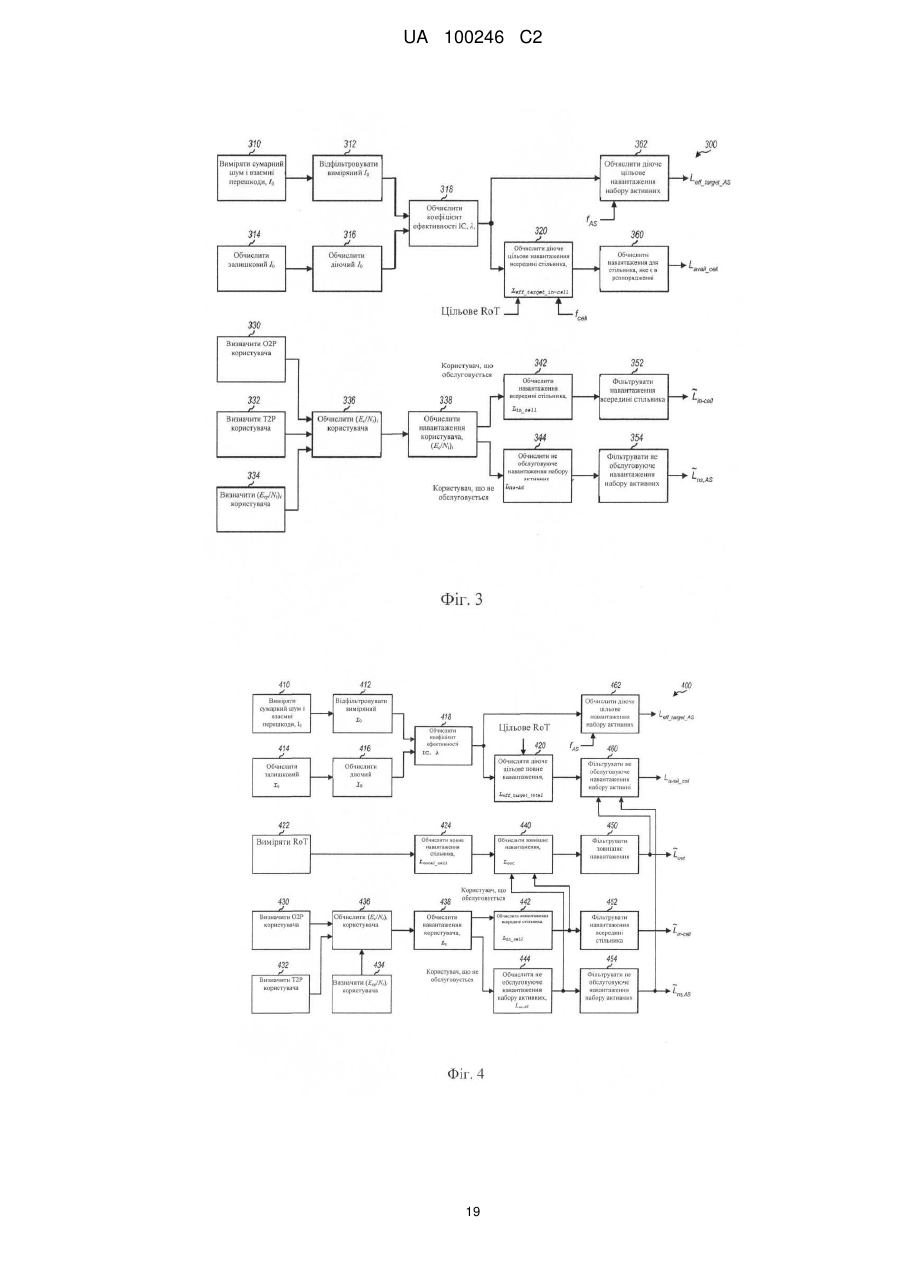
2. Спосіб за п. 1, який додатково полягає в тому, що:
вимірюють сумарні шум і взаємні перешкоди в згаданому стільнику без заглушення взаємних перешкод;
визначають залишкові шум і взаємні перешкоди в згаданому стільнику після заглушення взаємних перешкод; і
визначають коефіцієнт ефективності заглушення взаємних перешкод на основі виміряного сумарного шуму і взаємних перешкод, а також залишкового шуму і взаємних перешкод.
3. Спосіб за п. 2, в якому визначення коефіцієнта ефективності заглушення взаємних перешкод полягає в тому, що
фільтрують виміряні сумарний шум і взаємні перешкоди для одержання фільтрованого шуму і взаємних перешкод,
фільтрують залишкові шум і взаємні перешкоди для одержання діючого шуму і взаємних перешкод, і
визначають коефіцієнт ефективності заглушення взаємних перешкод на основі відношення діючого шуму і взаємних перешкод до фільтрованого шуму і взаємних перешкод.
4. Спосіб за п. 1, в якому визначення навантаження, що є в розпорядженні, полягає в тому, що визначають навантаження для згаданого стільника, що є в розпорядженні, додатково, на основі навантаження всередині стільника для користувачів, що обслуговуються згаданим стільником.
5. Спосіб за п. 4, який додатково полягає в тому, що:
визначають навантаження кожного користувача, що обслуговується згаданим стільником; і
визначають навантаження всередині стільника на основі навантажень всіх користувачів, що обслуговуються згаданим стільником.
6. Спосіб за п. 5, в якому визначення навантаження кожного користувача, що обслуговується згаданим стільником, полягає в тому, що
визначають відношення енергії пілот-сигналу на символ псевдошумової послідовності до сумарного шуму у користувача,
визначають відношення повної енергії на символ псевдошумової послідовності до сумарного шуму у користувача на основі відношення енергії пілот-сигналу на символ псевдошумової послідовності до сумарного шуму і щонайменше одного з відношення трафіку до пілот-сигналу (Т2Р) і відношення службових сигналів до пілот-сигналу (О2Р) для користувача, і
визначають навантаження користувача на основі відношення повної енергії на символ псевдошумової послідовності до сумарного шуму у користувача.
7. Спосіб за п. 1, в якому діюче цільове навантаження для згаданого стільника є діючим цільовим навантаженням всередині стільника для користувачів, що обслуговуються згаданим стільником, при цьому, визначення діючого цільового навантаження полягає в тому, що визначають діюче цільове навантаження всередині стільника на основі цільового перевищення рівня теплового шуму (RoT) для згаданого стільника, f-коефіцієнта стільника і коефіцієнта ефективності заглушення взаємних перешкод, і в якому, визначення навантаження, що є в розпорядженні, полягає в тому, що визначають навантаження для згаданого стільника, що є в розпорядженні, на основі діючого цільового навантаження всередині стільника, f-коефіцієнта стільника і навантаження всередині стільника для користувачів, що обслуговуються згаданим стільником.
8. Пристрій для бездротового зв'язку, який містить:
засіб для визначення діючого цільового навантаження для стільника, що використовує заглушення взаємних перешкод, при цьому діюче цільове навантаження є вищим, ніж цільове навантаження для згаданого стільника без заглушення взаємних перешкод;
засіб для визначення навантаження для згаданого стільника, що є в розпорядженні, на основі діючого цільового навантаження; і
засіб для планування користувачів в згаданому стільнику на передачу по висхідній лінії зв'язку на основі навантаження, що є в розпорядженні,
причому пристрій виконаний з можливістю визначення діючого цільового навантаження на основі цільового перевищення рівня теплового шуму (RoT) для згаданого стільника і коефіцієнта ефективності заглушення взаємних перешкод.
9. Спосіб бездротового зв'язку, який полягає в тому, що:
визначають залишкові шум і взаємні перешкоди в стільнику після виконання заглушення взаємних перешкод; і
планують користувачів в згаданому стільнику на передачу по висхідній лінії зв'язку на основі залишкових шуму і взаємних перешкод.
10. Спосіб за п. 9, який додатково полягає в тому, що:
вимірюють сумарний шум і взаємні перешкоди в згаданому стільнику без заглушення взаємних перешкод, і
в якому планування користувачів полягає в тому, що планують користувачів, додатково, на основі виміряних сумарного шуму і взаємних перешкод.
11. Спосіб за п. 10, який додатково полягає в тому, що:
фільтрують виміряні сумарний шум і взаємні перешкоди для одержання фільтрованого шуму і взаємних перешкод;
фільтрують залишкові шум і взаємні перешкоди для одержання діючого шуму і взаємних перешкод; і
визначають коефіцієнт ефективності заглушення взаємних перешкод на основі діючого шуму і взаємних перешкод, а також фільтрованого шумуі взаємних перешкод, і
в якому планування користувачів полягає в тому, що планують користувачів, додатково, на основі коефіцієнта ефективності заглушення взаємних перешкод.
12. Спосіб бездротового зв'язку, який полягає в тому, що:
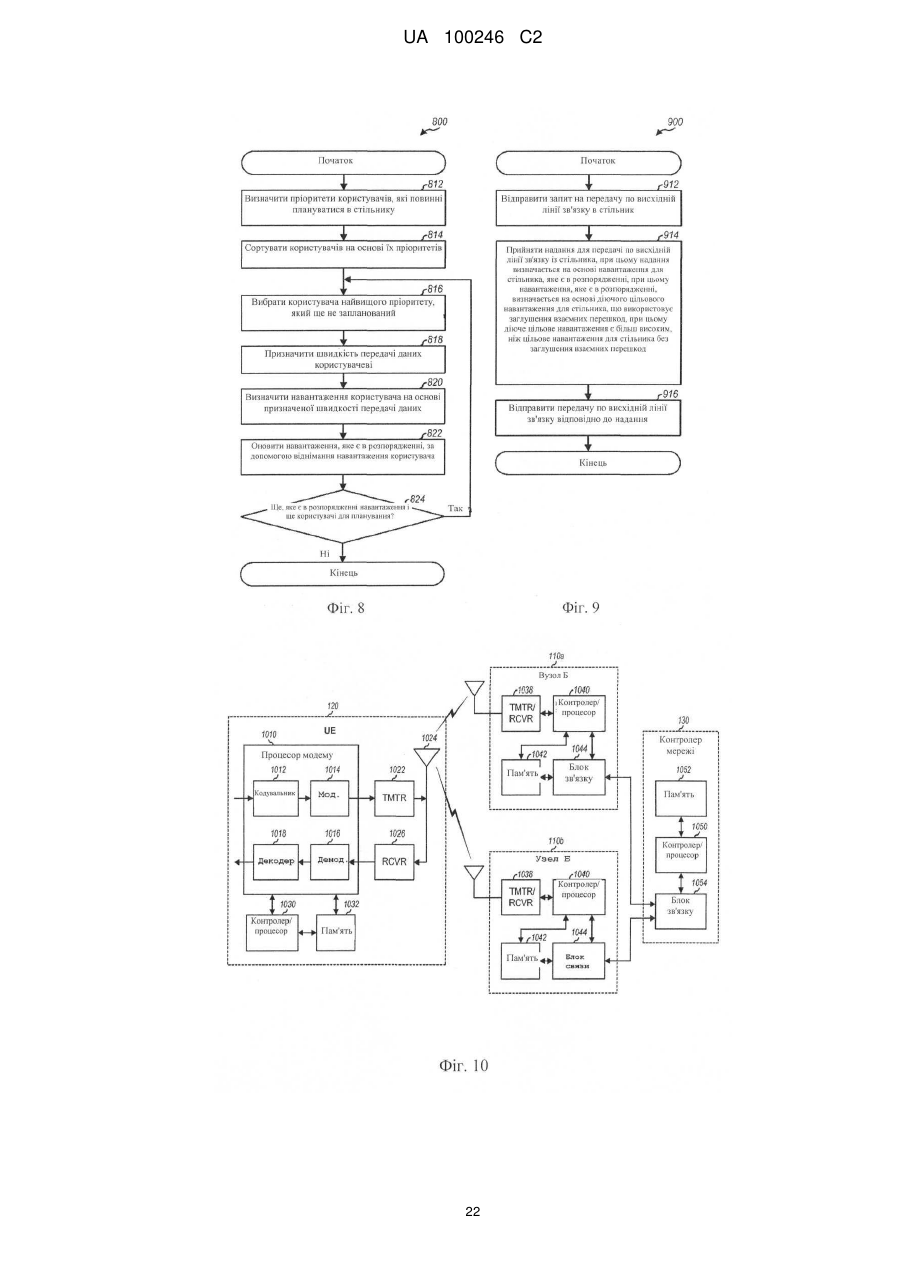
відправляють запит на передачу по висхідній лінії зв'язку в стільник;
приймають надання для передачі по висхідній лінії зв'язку зі згаданого стільника, при цьому надання визначають на основі навантаження для згаданого стільника, що є в розпорядженні, при цьому навантаження, що є в розпорядженні, визначають на основі діючого цільового навантаження для згаданого стільника, що використовує заглушення взаємних перешкод, і при цьому діюче цільове навантаження є вищим, ніж цільове навантаження для згаданого стільника без заглушення взаємних перешкод, причому діюче цільове навантаження визначають на основі цільового перевищення рівня теплового шуму (RoT) для згаданого стільника і коефіцієнта ефективності заглушення взаємних перешкод; і
відправляють передачу по висхідній лінії зв'язку згідно з наданням.
13. Спосіб за п. 12, який додатково полягає в тому, що:
відправляють щонайменше один виділений канал в згаданий стільник, при цьому, навантаження, що є в розпорядженні, визначають, додатково, на основі навантаження, обумовленого виділеними каналами користувачів, що обслуговуються згаданим стільником.
14. Машиночитаний носій, що містить збережені на ньому коди, які, при виконанні комп'ютером, приписують комп'ютеру виконувати спосіб за будь-яким з пп. 1-7.
15. Машиночитаний носій, який містить збережені на ньому коди, які, при виконанні комп'ютером, приписують комп'ютеру виконувати спосіб за будь-яким з пп. 9-11.
16. Машиночитаний носій, який містить збережені на ньому коди, які, при виконанні комп'ютером, приписують комп'ютеру виконувати спосіб за будь-яким з пп. 12 або 13.
Текст
Реферат: Описані технології для планування користувачів на передачу по висхідній лінії зв'язку в системі бездротового зв'язку. Стільник може виконувати заглушення взаємних перешкод для передач висхідної лінії зв'язку і може спостерігати більш низькі діючі шум і взаємні перешкоди внаслідок заглушення взаємних перешкод. Більш низькі діючі шум і взаємні перешкоди можуть надавати стільнику можливість працювати з більш високим діючим цільовим навантаженням, яке може підтримувати більш високу загальну пропускну здатність для стільника. В одній з конструкцій, діюче цільове навантаження для стільника, що використовує заглушення взаємних перешкод, може визначатися, наприклад на основі цільового перевищення рівня теплового шуму (RoT) для стільника і коефіцієнта ефективності заглушення взаємних перешкод. Навантаження для стільника, яке є в розпорядженні, може визначатися на основі діючого цільового навантаження, яке може бути вищим, ніж цільове навантаження для стільника без заглушення взаємних перешкод. Користувачі в стільнику, в такому випадку, можуть плануватися на передачу по висхідній лінії зв'язку на основі навантаження, яке є в розпорядженні. UA 100246 C2 (12) UA 100246 C2 UA 100246 C2 5 10 15 20 25 30 35 40 45 50 55 60 Дана заявка на патент заявляє пріоритет за попередньою заявкою США під порядковим № 60/975,853, поданою 28 вересня 2007 року, переуступленою її правонаступнику і явним чином включеною в матеріали даної заявки за допомогою посилання. Галузь техніки Дане розкриття в цілому належить до зв'язку, а більш точно, до технологій для планування користувачів у системі бездротового зв’язку. Рівень техніки Системи бездротового зв’язку широко застосовуються для надання різних послуг зв'язку, таких як мова, відео, пакетні дані, обмін повідомленнями, широкомовлення, тощо. Ці системи можуть бути системами множинного доступу, що допускають підтримку численних користувачів за допомогою спільного використання системних ресурсів, які є в розпорядженні. Приклади таких систем множинного доступу включають в себе системи множинного доступу з кодовим розділенням каналів (CDMA), системи множинного доступу з часовим розділенням каналів (TDMA), системи множинного доступу з частотним розділенням каналів (FDMA), системи FDMA з ортогональним розділенням (OFDMA) і системи FDMA на одиночній несучій (SC-FDMA). У системі зв'язку CDMA, численне користувацьке обладнання (UE) в цей час може здійснювати передачу по висхідній лінії зв'язку на Вузол Б. Передача з кожного UE діє як взаємна перешкода на передачі з інших UE на Вузлі Б. Якість прийнятого сигналу даного UE може залежати від різних факторів, таких як величина потужності передачі, що використовується UE, втрати в тракті передачі з UE на Вузол Б, величини взаємних перешкод, що спостерігаються Вузлом Б, тощо. Якість прийнятого сигналу UE може бути поліпшена підвищенням потужності передачі UE. Однак, більш висока потужність передачі UE збільшувала б взаємні перешкоди у відношенні інших UE, кожному з яких може знадобитися збільшувати свою потужність передачі, для того щоб підтримувати необхідну якість прийнятого сигналу для такого UE. UE можуть бути періодично активними на висхідній лінії зв'язку і можуть здійснювати передачу спорадично будь-який раз, коли є дані для відправлення. UE можуть плануватися для передачі по висхідній лінії зв'язку будь-який раз, коли вони мають дані для відправлення. Планування може бути таким, що створює складну задачу внаслідок взаємних перешкод між передачами висхідної лінії зв'язку з різних UE. Cуть винаходу У матеріалах даної заявки описані технології для планування користувачів на передачу по висхідній лінії зв'язку в системі бездротового зв’язку. Стільник може виконувати заглушення взаємних перешкод для передач висхідної лінії зв'язку, для того щоб поліпшувати робочі характеристики. Стільник може оцінювати взаємні перешкоди, зумовлені передачами висхідної лінії зв'язку, які приймаються стільником, і може віднімати оцінені взаємні перешкоди з прийнятого сигналу. Стільник може спостерігати більш низькі діючі шум і взаємні перешкоди внаслідок заглушення взаємних перешкод. Більш низькі діючі шум і взаємні перешкоди можуть надавати стільнику можливість працювати з більш високим діючим цільовим навантаженням, яке може підтримувати більш високу загальну пропускну здатність для стільника. В одній з конструкцій, діюче цільове навантаження для стільника, який використовує заглушення взаємних перешкод, наприклад, може визначатися на основі цільового перевищення рівня теплового шуму (RoT) для стільника і коефіцієнта ефективності заглушення взаємних перешкод. Навантаження для стільника, яке є в розпорядженні, може визначатися на основі діючого цільового навантаження, яке може бути вище, ніж цільове навантаження для стільника без заглушення взаємних перешкод. Користувачі в стільнику можуть плануватися на передачу по висхідній лінії зв'язку на основі навантаження, яке є в розпорядженні. В одній з конструкцій, користувачі можуть плануватися, один користувач за раз, на основі їх пріоритетів. Швидкість передачі даних може призначатися користувачеві на основі запасу потужності і розміру черги користувача. Навантаження користувача може визначатися на основі призначеної швидкості передачі даних та іншої істотної інформації. Навантаження, яке є в розпорядженні, може оновлюватися за допомогою віднімання навантаження користувача. Інший користувач може плануватися подібним чином, на основі оновленого навантаження, яке є в розпорядженні. Різні аспекти та ознаки розкриття нижче описані більш детально. Короткий опис креслень Фіг.1 показує систему бездротового зв’язку. Фіг.2 показує графік нормованої пропускної здатності стільника залежно від RoT. Фіг.3 показує структурну схему блока для обчислення різних навантажень для основаного на навантаженні планування із заглушенням взаємних перешкод. 1 UA 100246 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг.4 показує структурну схему блока для обчислення різних навантажень для основаного на RoT плануванні із заглушенням взаємних перешкод. Фіг.5 показує структурну схему блока для планування користувачів на висхідній лінії зв'язку. Фіг.6 показує послідовність операцій для планування користувачів у стільнику. Фіг.7 показує послідовність операцій для визначення навантаження для стільника, яке є в розпорядженні. Фіг.8 показує послідовність операцій для планування користувачів на основі навантаження, яке є в розпорядженні. Фіг.9 показує послідовність операцій, що виконується UE для передачі висхідної лінії зв'язку. Фіг.10 показує структурну схему UE, два Вузли Б і контролер мережі. Докладний опис Технології, описані в матеріалах даної заявки, можуть використовуватися для різних систем бездротового зв’язку, таких як системи CDMA, TDMA, FDMA, OFDMA, SC-FDMA та інші системи. Терміни «система» та «мережа» часто використовуються взаємозамінно. Система CDMA може реалізовувати технологію радіозв'язку, таку як універсальний наземний радіодоступ (UTRA), cdma2000, тощо. UTRA включає в себе широкосмуговий CDMA (W-CDMA) та інші варіанти CDMA. cdma2000 покриває стандарти IS-2000, IS-95 та IS-856 (Північноамериканські стандарти стільникового зв'язку). Система TDMA може реалізовувати технологію радіозв'язку, таку як глобальна система мобільного зв'язку (GSM). Система OFDMA може реалізовувати технологію радіозв'язку, таку як розвинений UTRA (E-UTRA), Надширокосмуговий мобільний зв'язок (UMB), стандарт IEEE 802.20, стандарт IEEE 802.16 (WiMAX), стандарт 802.11 (WiFi), Flash-OFDM®, тощо. UTRA та E-UTRA є частиною Універсальної системи мобільних телекомунікацій (UMTS). Довгостроковий розвиток (LTE) 3GPP є планованим випуском UMTS, який використовує EUTRA. UTRA, E-UTRA, UMTS, LTE та GSM описані в документах від організації, що іменується «Проект партнерства 3-ого покоління» (3GPP). cdma2000 та UMB описані в документах від організації, що іменується «Проект 2 партнерства 3-ого покоління» (3GPP2). Ці різні технології і стандарти радіозв'язку відомі в даній галузі техніки. Для розуміння, деякі аспекти технологій описані нижче для UMTS, і термінологія UMTS використовується в більшій частині опису, наведеного нижче. Фіг.1 показує систему 100 бездротового зв’язку, яка може бути універсальною наземною мережею радіодоступу (UTRAN) в UMTS. Система 100 може включати в себе будь-яку кількість Вузлів Б 110. Вузол Б може бути стаціонарною станцією, яка підтримує зв'язок з UE і також може вказуватися посиланням як розвинений Вузол Б (eNB), базова станція, точка доступу, тощо. Кожний Вузол Б 110 забезпечує покриття зв'язку для конкретної географічної зони 102 і підтримує зв'язок для UE, розташованих в межах зони покриття. Зона покриття Вузла Б може поділятися на численні (наприклад, три) менші зони, і кожна менша зона може обслуговуватися відповідною підсистемою Вузла Б. У 3GPP, термін «стільник» може вказувати посиланням на найменшу зону покриття Вузла Б і/або підсистему Вузла Б, обслуговуючу цю зону покриття, залежно від контексту, в якому використовується термін. У 3GPP2, термін «сектор» може вказувати посиланням на найменшу зону покриття базової станції і/або підсистему базової станції, обслуговуючу цю зону покриття. Для розуміння, поняття стільника 3GPP використовується в описі, наведеному нижче. У прикладі, показаному на фіг.1, Вузол Б 110a обслуговує стільники A1, A2 та A3, Вузол Б 110b обслуговує стільники B1, B2 та B3, а Вузол В 110c обслуговує стільники C1, C2 та C3. Контролер 130 мережі може приєднуватися до Вузлів Б 110 і забезпечує координування і керування цими Вузлами Б. Контролер 130 мережі може бути одиночною мережною сутністю або сукупністю мережних сутностей. UE 120 можуть бути розосереджені по всій системі, і кожне UE може бути стаціонарним або мобільним. UE також може вказуватися посиланням як мобільна станція, термінал, термінал доступу, абонентський вузол, станція, тощо. UE може бути стільниковим телефоном, персональним цифровим секретарем (PDA), пристроєм бездротового зв’язку, кишеньковим пристроєм, бездротовим модемом, дорожнім комп'ютером, тощо. UE може підтримувати зв'язок з Вузлом Б через низхідну лінію зв'язку і висхідну лінію зв'язку. Низхідна лінія зв'язку (або пряма лінія зв'язку) вказує посиланням на лінію зв'язку з Вузла Б на UE, а висхідна лінія зв'язку (або зворотна лінія зв'язку) вказує посиланням на лінію зв'язку з UE на Вузол Б. Для розуміння, фіг.1 показує тільки передачі висхідної лінії зв'язку з UE 120 на Вузли Б 110. На фіг.1, суцільна лінія з одиночною стрілкою вказує передачу висхідної лінії зв'язку на обслуговуючий стільник, а пунктирна лінія з одиночною стрілкою вказує передачу висхідної лінії зв'язку на необслуговуючий стільник. Терміни «UE» і «користувач» в матеріалах даної заявки використовуються взаємозамінно. 2 UA 100246 C2 5 10 15 20 25 30 35 40 45 50 55 60 Редакція 6 3GPP, і пізніші, підтримують високошвидкісний пакетний доступ по висхідній лінії зв'язку (HSUPA), який є набором каналів і процедур, які дають можливість високошвидкісної передачі пакетних даних по висхідній лінії зв'язку. Що стосується HSUPA, користувач може відправляти повідомлення інформації плануванні (SI), яке містить в собі інформацію про розмір черги і запас потужності для користувача. Ця інформація може перетворюватися в максимальну швидкість передачі даних, яка може підтримуватися користувачем на висхідній лінії зв'язку. Планувальник може планувати користувача на передачу по висхідній лінії зв'язку і може відправляти надання по каналу абсолютного надання E-DCH (E-AGCH) або каналу відносного надання E-DCH (E-RGCH) користувачеві. Користувач може мати набір активних, який містить в собі обслуговуючу стільник і нуль або більше необслуговуючих стільників. Обслуговуючий стільник може відправляти (i) абсолютне надання по E-AGCH для вказівки величини потужності передачі, яку користувач може використовувати для передачі по висхідній лінії зв'язку, або (ii) відносне надання по E-RGCH для вказівки зміни від поточного надання, наприклад, збільшення або зменшення поточного надання на деяку величину. Кожний небслуговуючий стільник може відстежувати користувача і може відправляти відносне надання тільки для зменшення поточного надання. HSUPA підтримує гібридний автоматичний запит на повторну передачу (HARQ) по висхідній лінії зв'язку. Що стосується HARQ, користувач може відправляти передачу пакета в обслуговуючий стільник і може відправляти нуль або більше повторних передач пакета доти, доки підтвердження (ACK) не прийняте для пакета, або не була відправлена максимальна кількість повторних передач, або пакет не припинений з деякої іншої причини. Повторна передача чекаючого пакета має більш високий пріоритет, ніж передача нового пакета, в HSUPA. Чекаючий пакет є пакетом, який був відправлений, але декодований з помилкою. Як показано на фіг.1, кожний стільник може приймати передачі від користувачів, що обслуговуються таким стільником, а також передачі від користувачів, що не обслуговуються стільником. Сукупні взаємні перешкоди, що спостерігаються в кожному стільнику, складаються з (1) внутрішньостільникових взаємних перешкод від користувачів в межах одного і того самого стільника і (2) міжстільникових взаємних перешкод від користувачів в інших стільниках. Внутрішньостільникові взаємні перешкоди і міжстільникові взаємні перешкоди мають великий вплив на робочі характеристики і можуть враховуватися при плануванні користувачів, як описано нижче. На висхідній лінії зв'язку в системі 100, передача від кожного користувача діє як взаємні перешкоди на передачі від інших користувачів. Звідси, коли новий користувач запланований у висхідній лінії зв'язку, передача від цього користувача збільшує взаємні перешкоди для інших користувачів. Величина взаємних перешкод, викликаних новим користувачем, може бути такою, щозалежить від різних факторів, таких як величина потужності передачі, що використовується користувачем, втрат в тракті передачі від користувача в стільник, тощо. Щоб боротися з підвищеними взаємними перешкодами, кожний користувач, що залишився, може збільшувати свою потужність передачі, що може додатково збільшувати взаємні перешкоди в стільнику. По мірі того, як додається більша кількість користувачів, іншим активним користувачам може знадобитися збільшувати свою потужність передачі, і сукупні взаємні перешкоди в стільнику можуть збільшуватися. У деякий момент, користувачі більше не можуть додаватися. Таким чином, система може обмежуватися взаємними перешкодами у висхідній лінії зв'язку. Фіг.2 показує графік 210 нормованої пропускної здатності стільника залежно від RoT для висхідної лінії зв'язку. RoT є відношенням сумарного шуму і взаємних перешкод (I 0) до теплового шуму (N0) в стільнику. Нормована пропускна здатність стільника є сумарною пропускною здатністю всіх користувачів на висхідній лінії зв'язку, поділеній на максимальну сумарну пропускну здатність. Як показано на фіг.2, пропускна здатність стільника збільшується на більший відсоток при низькому RoT і асимптотично доходить до максимального значення при високому RoT. RoT є основним показником навантаження на висхідну лінію зв'язку. RoT може підтримуватися нижче визначеного заданого рівня, для того щоб уникнути нестійкості системи. RoT може змінюватися залежно від кількості користувачів, що плануються на висхідній лінії зв'язку, і швидкостей передачі даних користувачів, що плануються. Стільник може обробляти передачі висхідної лінії зв'язку із заглушенням взаємних перешкод, для того щоб поліпшувати робочі характеристики. Взагалі, стільник може виконувати заглушення взаємних перешкод для каналів пілот-сигналів, каналів керування і/або каналів даних, що відправляються користувачами. Для заглушення взаємних перешкод каналу даних від користувача, стільник може обробляти прийнятий сигнал, що містить в собі канал даних, для одержання декодованих даних для користувача. Стільник потім може обробляти декодовані 3 UA 100246 C2 5 10 15 20 25 дані таким самим чином, як користувач, для одержання сигналу даних, відправленого користувачем. Стільник може пропускати сигнал даних через оцінку каналу для користувача, щоб одержувати оцінку взаємних перешкод, зумовлених сигналом даних від користувача. Стільник потім може віднімати оцінені взаємні перешкоди з прийнятого сигналу для одержання підданого заглушенню взаємних перешкод сигналу. Стільник може обробляти підданий заглушенню взаємних перешкод сигнал для відновлення інших каналів даних, відправлених тим самим користувачем або іншим користувачем. Взагалі, стільник може намагатися заглушувати взаємні перешкоди, зумовлені будь-яким сигналом, відправленим по висхідній лінії зв'язку. Стільник може заглушувати взаємні перешкоди, зумовлені пілот-сигналом, керуючою інформацією і/або даними, для того щоб знижувати взаємні перешкоди в прийнятому сигналі. Пілот-сигналом є дані, які апріорі відомі як передавачу, так і приймачу. Керуюча інформація також може вказуватися посиланням як службова інформація, сигналізація, тощо. Стільник може виводити оцінку каналу на основі пілот-сигналу і може заглушувати взаємні перешкоди, зумовлені пілот-сигналом, з використанням оцінки каналу. Стільник може заглушувати взаємні перешкоди, зумовлені керуючою інформацією і/або даними, до або після декодування. За допомогою заглушення взаємних перешкод в прийнятому сигналі, більш висока швидкість передачі даних може використовуватися для каналу даних і/або може відправлятися більша кількість каналів даних. У аспекті, користувачі можуть плануватися на передачу по висхідній лінії зв'язку, беручи до уваги заглушення взаємних перешкод в стільнику. Стільник може виконувати заглушення взаємних перешкод і може спостерігати більш низький діючий I 0 внаслідок заглушення взаємних перешкод. Більш низький діючий I0 може надавати стільнику можливість працювати з більш високим діючим цільовим навантаженням, яке може підтримувати більш високу загальну пропускну здатність для стільника. Відношення повної енергії на символ псевдошумової послідовності до сумарного шуму, (Ec/Nt)i, для даного користувача i в даному стільнику, може бути виражено як: (Ec / Nt )i (Ecp / Nt )i (l O2Pi T2Pi ), 30 35 40 45 Li 50 гâíÿííÿ 1 де Ecp – енергія на символ псевдошумової послідовності для пілот-сигналу, Ec – повна енергія на символ псевдошумової послідовності для даних,службових сигналів або даних і пілот-сигналу, Nt – сумарний шум і взаємні перешкоди, що спостерігаються користувачем i, O2Pi – відношення службових сигналів до пілот-сигналу для користувача i, і T2Pi – відношення трафіку до пілот-сигналу для користувача i. Відношення енергії пілот-сигналу на символ псевдошумової послідовності до сумарного шуму, (Ecp/Nt)i, для користувача i може оцінюватися на основі пілот-сигналу, переданого користувачем i по висхідній лінії зв'язку. Користувач i може передавати керуючу інформацію на рівні потужності, визначеному згідно з O2Pi, і може передавати дані на рівні потужності, визначеному згідно з T2Pi. O2Pi – відношення рівня потужності керування до рівня потужності пілот-сигналу, а T2Pi – відношення рівня потужності даних до рівня потужності пілот-сигналу. Рівень потужності пілот-сигналу може настроюватися за допомогою регулювання потужності для досягнення необхідного рівня робочих характеристик, наприклад, цільової частоти появи помилок пакетів (PER). Відношення O2Pi та T2Pi можуть бути відомі або можуть визначатися для користувача i. (Ecp/Nt)i для користувача i, в такому випадку, може обчислюватися на основі оціненого (Ecp/Nt)i і відомих O2Pi та T2Pi. Навантаження користувача i може бути виражене як: (E c )i (E c / Nt )i I0 1 (E c / Nt )i гâíÿííÿ 2 де (Ec)i – повна енергія на символ псевдошумової послідовності для користувача i, а Li – навантаження користувача i. Друга рівність в рівнянні (2) може бути одержане діленням (E c)i на (Nt)i для одержання (Ec/Nt)i як в чисельнику, так і в знаменнику. (Ec/Nt)i потім може оцінюватися і використовуватися для обчислення Li. Сумарний шум і взаємні перешкоди, I0, що спостерігаються стільником, можуть бути виражені як: I0 (E c )i N0 (Nt )i (E c )i , гâíÿííÿ 3 i 55 де N0 – тепловий шум, що спостерігається стільником, і (Nt)i – сумарний шум і взаємні перешкоди, що спостерігаються користувачем i. Передача висхідної лінії зв'язку від користувача i може оброблятися багатовідвідним когерентним приймачем або компенсатором в стільнику. Що стосується багатовідвідного 4 UA 100246 C2 5 10 когерентного приймача, один або більше каналів рознесеного прийому можуть призначатися користувачеві i, і кожний канал рознесеного прийому може обробляти різний сигнальний тракт для користувача i. В цьому випадку, (Ec/Nt)i може оцінюватися кожним призначеним каналом рознесеного прийому, навантаження для кожного каналу рознесеного прийому може обчислюватися на основі оціненого (Ec/Nt)i, як показано в рівнянні (2), а навантаження для всіх призначених каналів рознесеного прийому можуть підсумовуватися для одержання навантаження Li користувача i. Що стосується компенсатора, навантаження Li користувача i може обчислюватися на основі вирівнювання навантажень, визначеного для компенсатора. Навантаження всіх користувачів, що обслуговуються стільником, Lin_cell, може бути виражене як: Lincell L , гâíÿííÿ 4 i iCell 15 де Cell – набір всіх користувачів, що обслуговуються стільником. Lin_cell також може вказуватися посиланням як навантаження всередині стільника. Навантаження всіх користувачів, що не обслуговуються стільником, але які мають стільник в своїх наборах активних, Lns,AS, може бути виражене як: L ns, AS 20 25 Li, i Cell iActiveSet гâíÿííÿ 5 де ActiveSet – набір всіх користувачів, що мають стільник в своїх наборах активних. L ns,AS також може вказуватися посиланням як не обслуговуюче навантаження набору активних. Користувач, що не обслуговується, є користувачем, який не обслуговується стільником, але містить стільник в своєму наборі активних. Стільник може мати безпосереднє керування над навантаженнями користувачів, що обслуговуються таким стільником, наприклад, за допомогою абсолютних і відносних надавань цим користувачам. Стільник може мати опосередковане керування над навантаженнями користувачів, що не обслуговуються, наприклад, за допомогою знижувальних відносних надавань цим користувачам. Lns,AS може обчислюватися окремо, для того щоб визначати, чи потрібно відправляти відносні надання користувачам, що не обслуговуються. Повне навантаження стільника, Lin_cell, може бути виражене як: L total _ cell Lin cell Lns, AS Lout , 30 fcell 35 40 Lns,AS Lout Lincell , гâíÿííÿ 7 f-коефіцієнт стільника, fcell, може бути постійним значенням, визначеним на основі комп'ютерного імітаційного моделювання, емпіричних вимірювань, тощо. Наприклад, f cell, може бути встановлена в 0,65 або деяке інше придатне значення. Користувачі в стільнику можуть плануватися на передачу по висхідній лінії зв'язку, з умови щоб RoT стільника було на заданому рівні, як показано на фіг.2. Це цільове RoT може перетворюватися в цільове повне навантаження, як викладено нижче: L t arg et _ total 1 45 гâíÿííÿ 6 де Lout – навантаження користувачів в інших стільниках і які не містять стільник в своїх наборах активних. Lout також може вказуватися посиланням як зовнішнє навантаження. У першій конструкції, може виконуватися основане на навантаженні планування із заглушенням взаємних перешкод. У цій конструкції, f-коефіцієнт стільника, fcell, може визначатися для стільника і може бути виражений як: 1 (1 fcell ) L t arg et _ in cell , гâíÿííÿ 8 t arg et _ RoT де Ltarget_total – цільове повне навантаження для стільника, а Leff_target_total – цільове навантаження всередині стільника. Цільове навантаження всередині стільника може бути виражене на основі цільового RoT, як викладено нижче: (1 L t arg et _ in cell 1 ) t arg et _ RoT , (1 fcell ) гâíÿííÿ 9 Коефіцієнт ефективності заглушення взаємних перешкод (IC), λ, може бути визначений як: ä³þ÷èé RoT çàãëóøåííÿ ì ïåðåøêîä , гâíÿííÿ 10 ðåàëüíèé RoT 5 UA 100246 C2 5 Коефіцієнт ефективності IC, λ, є відношенням діючих взаємних перешкод із заглушенням взаємних перешкод до реальних взаємних перешкод в стільнику. Коефіцієнт ефективності IC, λ, є рівним або меншим, ніж одиниця, або λ≤1,0, і може оцінюватися, як описано нижче. Використання заглушення взаємних перешкод може надавати стільнику можливість працювати з більш високим діючим цільовим RoT, яке може поліпшувати загальну пропускну здатність для стільника. Коефіцієнт ефективності заглушення взаємних перешкод може бути виражений як: 10 1 L eff _ t arg et _ total 1 L t arg et _ total 1 (1 fcell ) L eff _ t arg et _ in cell 1 (1 fcell ) L t arg et _ in cell , гâíÿííÿ 11 де Leff_target_total – діюче цільове повне навантаження із заглушенням взаємних перешкод, а Leff_target_in-cell – діюче цільове навантаження всередині стільника із заглушенням взаємних перешкод. Діюче цільове навантаження всередині стільника може бути виражене як: 1 L eff _ t arg et _ in cell L t arg et _ in cell (1 ) L t arg et _ in cell , гâíÿííÿ 12 1 f cell 15 20 Як показано в рівнянні (12), діюче цільове навантаження всередині стільника дорівнює цільовому навантаженню всередині стільника плюс коефіцієнт (1-λ)∙(1/(1+fcell)–Leff_target_total), зумовлений заглушенням взаємних перешкод. Діюче цільове навантаження всередині стільника є динамічним значенням, яке є таким, що залежить від коефіцієнта ефективності IC, λ. Користувачі можуть передавати пілот-сигнал по висхідній лінії зв'язку в кожному інтервалі в 0,667 мілісекунд (мс). Lin_cell може обчислюватися в кожному інтервалі, як описано вище. Lin_cell може бути зашумлена і може фільтруватися фільтром з нескінченною імпульсною характеристикою (НІХ, IIR), як викладено нижче: 1 1 ~ ~ Lin cell (n 1) Lin cell (n), Lin cell (n) 1 T Tin cell in cell гâíÿííÿ 13 де Lin_cell(n) - обчислене значення в інтервалі n, ~ Lincell - фільтроване значення в інтервалі n, і 25 Tin-cell – постійна часу, яка визначає величину усереднення. Фільтрація також може бути основана на фільтрі з кінцевою імпульсною характеристикою (КІХ, FIR), фільтрі ковзного середнього, тощо. Навантаження для стільника, яке є в розпорядженні, Lavail_cell, потім може бути визначене як: Lavail _ cell L eff _ t arg et _ in cell , 30 35 40 45 50 гâíÿííÿ 14 Навантаження, яке є в розпорядженні, може розподілятися по користувачах в стільнику, як описано нижче. Фіг.3 показує структурну схему конструкції блока 300 для обчислення навантаження L avail_cell, яке є в розпорядженні, для основаного на навантаженні планування із заглушенням взаємних перешкод. Сумарний шум і взаємні перешкоди, I0, в стільнику можуть вимірюватися в блоці 310 і фільтруватися в блоці 312 для одержання фільтрованого I0, як описано нижче. Фільтрований I0 є фільтрованим варіантом виміряного I0 і може бути більш точною оцінкою реального I0 в стільнику. Залишковий I0 може визначатися в блоці 314 і фільтруватися в блоці 316 для одержання діючого I0, як також описано нижче. Залишковий I0 є сумарним шумом і взаємними перешкодами, що залишилися в стільнику після виконання заглушення взаємних перешкод. Діючий I0 є фільтрованим варіантом залишкового I 0 і може використовуватися для планування. Коефіцієнт ефективності IC, λ, може визначатися в блоці 318 на основі діючого I 0 і фільтрованого I0. Діюче цільове навантаження всередині стільника, Leff_target_in-cell, може обчислюватися в блоці 320 на основі цільового RoT, коефіцієнта ефективності IC, λ, і fкоефіцієнта стільника, fcell, як показано в рівняннях (9) та (12). Для кожного користувача, який має стільник в своєму наборі активних, O2Pi користувача може визначатися в блоці 330, T2Pi користувача може визначатися в блоці 332, а (E cp/Nt)i у користувача може визначатися в блоці 334. (Ec/Nt)i кожного користувача може обчислюватися в блоці 336 на основі (Ecp/Nt)i, O2Pi та T2Pi, наприклад, як показано в рівнянні (1). Навантаження кожного користувача може обчислюватися в блоці 338 на основі (Ec/Nt)i, наприклад, як показано в рівнянні (2). Кожний користувач, який обслуговується стільником, може пересилатися в блок 342, а кожний користувач, що не обслуговується, який має стільник в своєму наборі активних, але який не обслуговується стільником, може пересилатися в блок 344. Навантаження всередині стільника, Lin_cell, може обчислюватися в блоці 342 накопиченням навантажень всіх користувачів, 6 UA 100246 C2 5 що обслуговуються стільником, наприклад, як показано в рівнянні (4). Не обслуговуюче навантаження Lns,AS набору активних може обчислюватися в блоці 344 накопиченням навантажень всіх користувачів, що не обслуговуються, наприклад, як показано в рівнянні (5). Навантаження всередині стільника, Lin_cell, може фільтруватися в блоці 352, наприклад, як показано в рівнянні (13). Не обслуговуюче навантаження L ns,AS набору активних може фільтруватися в блоці 354, наприклад, за допомогою НІХ-фільтра. Навантаження Lavail_cell, яке є в розпорядженні, може обчислюватися в блоці 360 на основі діючого цільового навантаження всередині стільника, Leff_target_in-cell, наприклад, як показано в рівнянні (14). Lavail_cell, ~ Lns , AS 10 можуть використовуватися для планування, як описано нижче. У другій конструкції, може виконуватися основане на RoT планування із заглушенням взаємних перешкод. У цій конструкції, RoT може вимірюватися, як описано нижче. Повне навантаження стільника, Lin_cell, в такому випадку, може обчислюватися на основі виміряного RoT, як викладено нижче: L total _ cell 15 I0 N0 1 1 , I0 RoT гâíÿííÿ 15 Користувачі в стільнику можуть плануватися на передачу по висхідній лінії зв'язку, з умови щоб RoT стільника було на заданому рівні, як показано на фіг.2. Це цільове RoT може перетворюватися в цільове повне навантаження, як показано в рівнянні (8). Діюче цільове повне навантаження може бути виражене як: L eff _ t arg et _ total (1 ) (1 L t arg et _ total ), 20 25 30 ~ Lincell та гâíÿííÿ 16 Як показано в рівнянні (16), діюче цільове повне навантаження рівне цільовому повному навантаженню плюс коефіцієнт (1-λ)∙(1-Ltarget_total), зумовлений заглушенням взаємних перешкод. Діюче цільове повне навантаження є динамічним значенням, яке є таким, що залежить від коефіцієнта ефективності IC, λ. Зовнішнє навантаження може бути обчислене як: Lout L total cell Lns, AS , гâíÿííÿ 17 Користувачі можуть передавати пілот-сигнал по висхідній лінії зв'язку в кожному інтервалі. Lin_cell та Lns,AS можуть обчислюватися в кожному інтервалі, як показано в рівняннях (4) та (5), відповідно. Lin_cell може обчислюватися в кожному інтервалі на основі виміряного RoT, як показано в рівнянні (15). Lout, в такому випадку, може обчислюватися в кожному інтервалі на основі Lin_cell, Lin_cell та Lns,AS, як показано в рівнянні (17). Lin_cell, Lns,AS та Lout можуть бути зашумленими параметрами і можуть фільтруватися за допомогою НІХ-фільтрів, як викладено нижче: 1 ~ 1 ~ Lin _ cell (n 1) L Lin cell (n) 1 (n), гâíÿííÿ 18 Tin _ cell in _ cell Tin _ cell 1 ~ ~ Lns, AS (n 1) 1 L ns, AS (n), гâíÿííÿ 19 Lns, AS (n) 1 Tns, AS Tns, AS 1 1 ~ ~ Lout (n 1) Lout (n) 1 T L out (n), гâíÿííÿ 20 Tout out де Lin_cell(n), Lns,AS(n) та Lout(n) - обчислені значення в інтервалі n, 35 ~ ~ ~ Lincell (n) , Lns , AS (n) та Lout (n) - фільтровані значення в інтервалі n, і Tin-cell, Tns,AS та Tout – постійні часу для Lin_cell, Lns,AS та Lout, відповідно. Навантаження для стільника, яке є в розпорядженні, L avail_cell, в такому випадку, може бути виражене як: ~ ~ L avail _ cell L eff _ t arg et _ total Lout Lns, AS , 40 45 гâíÿííÿ 21 ~ ~ L L де out та ns , AS - поточні фільтровані значення для Lout та Lns,AS, відповідно. Навантаження, яке є в розпорядженні, може розподілятися по користувачах в стільнику, як описано нижче. Фіг.4 показує структурну схему конструкції блока 400 для обчислення навантаження L avail_cell, яке є в розпорядженні, для основаного на RoT планування із заглушенням взаємних перешкод. Сумарний шум і взаємні перешкоди, I0, в стільнику можуть вимірюватися в блоці 410 і фільтруватися в блоці 412 для одержання фільтрованого I 0. Залишковий I0 може визначатися в блоці 414 і фільтруватися в блоці 416 для одержання діючого I0. Коефіцієнт ефективності IC, λ, може визначатися в блоці 418 на основі діючого I 0 і фільтрованого I0. Діюче цільове повне 7 UA 100246 C2 5 10 15 20 навантаження, Leff_target_total, може обчислюватися в блоці 420 на основі цільового RoT і коефіцієнта ефективності IC, λ, як показано в рівняннях (8) та (16). RoT стільника може вимірюватися в блоці 422, як описано нижче. Повне навантаження стільника, Lin_cell, може обчислюватися на основі виміряного RoT в блоці 424, наприклад, як показано в рівнянні (15). Для кожного користувача, який має стільник в своєму наборі активних, O2Pi користувача може визначатися в блоці 430, T2Pi користувача може визначатися в блоці 432, а (E cp/Nt)i у користувача може визначатися в блоці 434. (Ec/Nt)i кожного користувача може обчислюватися в блоці 436 на основі (Ecp/Nt)i, O2Pi та T2Pi. Навантаження кожного користувача може обчислюватися в блоці 438 на основі (Ec/Nt)i. Кожний користувач, який обслуговується стільником, може пересилатися в блок 442, а кожний користувач, що не обслуговується, який має стільник в своєму наборі активних, але який не обслуговується стільником, може пересилатися в блок 444. Навантаження всередині стільника, Lin_cell, може обчислюватися в блоці 442 накопиченням навантажень всіх користувачів, що обслуговуються стільником, і може фільтруватися в блоці 352, наприклад, як показано в рівнянні (18). Не обслуговуюче навантаження набору активних, L ns,AS, може обчислюватися в блоці 444 накопиченням навантажень всіх користувачів, що не обслуговуються, наприклад, як показано в рівнянні (19). Зовнішнє навантаження Lout може обчислюватися в блоці 440 відніманням навантаження всередині стільника, Lin_cell, і не обслуговуючого навантаження набору активних, L ns,AS, з повного навантаження стільника Lns,AS, наприклад, як показано в рівнянні (17). Зовнішнє навантаження Lout може фільтруватися в блоці 450, наприклад, як показано в рівнянні (20). Навантаження Lavail_cell, яке є в розпорядженні, може визначатися в блоці 460 на основі діючого цільового повного 25 навантаження Leff_target_total, фільтрованого зовнішнього фільтрованого не обслуговуючого навантаження набору активних, навантаження ~ Lns , AS ~ Lout , і , наприклад, як ~ ~ L показано в рівнянні (21). Lavail_cell, Lin cell та ns , AS і можуть використовуватися для планування, 30 35 як описано нижче. У конструкції, показаній в рівнянні (21), як Lns,AS, так і Lout, можуть відніматися з діючого цільового повного навантаження Leff_target_total для одержання навантаження Lavail_cell, Lns,AS та Lout, яке є в розпорядженні, можуть розглядатися як повне навантаження всіх користувачів, що не обслуговуються стільником. У ще одній конструкції, навантаження всередині стільника, Lin_cell, може визначатися, наприклад, як показано в рівнянні (4), але не обслуговуюче навантаження набору активних, Lns,AS, не визначається. Зовнішнє навантаження L’out, в такому випадку, може обчислюватися як: L L total _ cell Lin _ cell , out гâíÿííÿ 22 L’out включає в себе як Lns,AS, так і Lout. L’out може фільтруватися (наприклад, за допомогою НІХ-фільтра) для одержання ~ L'out , як викладено нижче: 40 ~ L avail _ cell L eff _ t arg et _ total Lout , 50 гâíÿííÿ 23 Lavail_cell може розподілятися по користувачах в стільнику, як описано нижче. Для обох, основаного на навантаженні планування та основаного на RoT планування, із заглушенням взаємних перешкод, I0 може вимірюватися на основі вхідних відліків з приймача, як викладено нижче: ²0 (n) 45 ~ L'out . Lavail_cell потім може визначатися на основі Leff_target_total та I 2 in 2 n, k Qin n, k , гâíÿííÿ 24 k де Iin(n,k) – синфазний вхідний відлік для періоду k відліків в інтервалі n, де Qin(n,k) – квадратурний вхідний відлік для періоду k відліків в інтервалі n, і I0(n) – виміряний сумарний шум і взаємні перешкоди для інтервалу n. У рівнянні (24), підсумовування може виконуватися по всіх періодах відліків в інтервалі n. I0(n) також може усереднюватися по всіх приймальних антенах. I 0(n) може фільтруватися, як викладено нижче: 1 ~ I (n) 1 0 Tload ~ 1 I (n 1) 0 T load I0 (n), гâíÿííÿ 25 8 UA 100246 C2 де Tload – постійна часу, яка визначає величину усереднення, а ~ I 0 (n) - фільтрований шум і взаємні перешкоди для інтервалу n. Контур автоматичного регулювання посилення (АРУ, AGC) може підтримувати I in Qin на 2 2 ~ 5 постійному значенні, I0,target. У цьому випадку, I0(n) та I 0 (n) обидва можуть встановлюватися в I0,target. Одна або більше ітерацій заглушення взаємних перешкод можуть виконуватися над вхідними відліками, щоб заглушувати взаємні перешкоди, зумовлені пілот-сигналом, керуючою інформацією і/або даними. Залишковий I0 може обчислюватися на основі підданих заглушенню взаємних перешкод відліків після заглушення взаємних перешкод, як викладено нижче: I0,res (n) 10 15 I 25 30 гâíÿííÿ 26 k де где Iic(n,k) – синфазний підданий заглушенню взаємних перешкод відлік для періоду k відліків в інтервалі n, Qin(n,k) – квадратурний підданий заглушенню взаємних перешкод відлік, і I0,res(n) – залишковий шум і взаємні перешкоди для інтервалу n. Кожна ітерація заглушення взаємних перешкод може виконуватися по одному або більше інтервалах. I0,res(n) може оновлюватися для всіх інтервалів, в яких виконується заглушення взаємних перешкод. I0,res(n) також може усереднюватися по всіх приймальних антенах. I 0,res(n) може фільтруватися, як викладено нижче: I0,eff (n) 20 2 2 ic (n, k ) Qic (n, k ) , 1 N I 0,res (n l), гâíÿííÿ 27 l де N - кількість інтервалів, на яких усереднюється I 0,res(n). N може визначатися каналом керування з найгіршим енергетичним запасом лінії зв'язку. Наприклад, N може відповідати тривалості повідомлення, відправленого по каналу з довільним доступом (наприклад, рівній 15 інтервалів) або може бути рівним деякому іншому підходящому значенню. У конструкції, показаній в рівнянні (27), I0,eff(n) одержується на основі фільтра ковзного середнього, працюючого на N інтервалах. В одній з конструкцій, ковзне середнє проходить по N найостанніших інтервалах, що йдуть один за одним, так що ℓ=0, 1, ..., N-1. У ще одній конструкції, ковзне середнє проходить по N найостанніших інтервалах для даного чергування HARQ. Може бути визначене L чергувань HARQ, і кожне чергування HARQ може включати в себе інтервали, які рознесені на L інтервалів. У цій конструкції, ℓ=0, L, ..., L∙(N-1). Фільтрація I0,res(n) також може бути основана на НІХ-фільтрі, КІХ-фільтрі або деякому іншому типі фільтра. Коефіцієнт ефективності IC, λ, може обчислюватися на основі I0,eff та нижче: ~ I 0 , як викладено I ,eff (n) (n) 0~ , гâíÿííÿ 28 I (n) 0 35 Для основаного на RoT планування, RoT стільника може вимірюватися, для того щоб обчислювати повне навантаження Lin_cell стільника. RoT може бути виражений як: RoT 40 45 50 I0 , N0 гâíÿííÿ 29 Сумарний шум і взаємні перешкоди I 0 можуть без великих зусиль вимірюватися, як описано вище. Тепловий шум N0 може вимірюватися декількома способами. В одній з конструкцій, N0 може вимірюватися протягом проміжку мовчання, в якому ніякі користувачі не передають по висхідній лінії зв'язку, і може бути рівним повній потужності сигналу, що приймається в стільнику протягом проміжку мовчання. У ще одній конструкції, повна потужність сигналу, що приймається, в боковій смузі між несучими WCDMA може вимірюватися і використовуватися для оцінки N0. Наприклад, відліки до фільтра формування імпульсів у стільнику можуть перетворюватися швидким перетворенням Фур'є (ШПФ, FFT) для одержання спектральної щільності потужності обох, основної смуги і бокової смуги. N0 в такому випадку може визначатися на основі частини спектральної щільності потужності для бокової смуги. N0 також може вимірюватися іншими способами. У будь-якому випадку, RoT стільника може обчислюватися на основі виміряного I0 і виміряному N0. Для обох, основаного на навантаженні і основаного на RoT, планування із заглушенням взаємних перешкод, користувачі в стільнику можуть плануватися в кожному інтервалі часу 9 UA 100246 C2 5 10 15 20 передачі (TTI) на основі навантаження в стільнику, яке є в розпорядженні. TTI може бути 2 мс або 10 мс для HSUPA. Користувачі в стільнику можуть плануватися різними способами. В одній з конструкцій, навантаження, яке є в розпорядженні, може розподілятися по різних класах або типах передач в наступному порядку: 1. Передачі по виділених каналах, призначених користувачам, 2. Повторні передачі чекаючих даних з HARQ, 3. Передачі, що автономно відправляються користувачами без потреби в плануванні, і 4. Передачі нових даних. Користувачеві можуть бути призначені один або більше виділених каналів для передачі даних, керуючої інформації, пілот-сигналу, тощо. Користувачеві також може бути надана можливість передавати дані в будь-який час, аж до зумовленої автономної швидкості передачі даних, без необхідності плануватися. Ця автономна швидкість передачі даних може заздалегідь конфігуруватися і може використовуватися для відправлення чутливих до затримки даних (наприклад, мовних даних) і/або невеликих обсягів даних. Автономна передача таких даних може скорочувати службові сигнали і запізнення планування. Користувач також може мати чекаючий пакет, який не був правильно декодованим стільником, і може відчувати необхідність у відправленні повторної передачі пакета. Навантаження виділених каналів для всіх користувачів, що обслуговуються стільником, може визначатися на основі (Ecp/Nt)i, а також O2Pi та T2Pi кожного користувача. Користувачі з чекаючими пакетами можуть ідентифікуватися, і може визначатися навантаження повторних передач чекаючих пакетів від цих користувачів. Навантаження автономних передач від користувачів також може визначатися. Навантаження, яке є в розпорядженні, для планування, Lavail_sched, в такому випадку, може бути виражене як: Lavail _ sched Lavail _ cell LDPCH Lretran Lautonomos , 25 30 де LDPCH – навантаження передач по виділених каналах, Lretran – навантаження повторних передач чекаючих пакетів, і Lautonomous – навантаження автономних передач. Навантаження Lavail_sched, яке є в розпорядженні, може розподілятися по користувачах, що запитують передачу по висхідній лінії зв'язку, на основі різних алгоритмів планування. В одному з алгоритмів планування, запитуючі користувачі можуть пріоритезуватися на основі різних факторів, таких як їх швидкості передачі даних, що підтримуються, їх середні пропускні здатності, їх вимоги до якості обслуговування (QoS), тощо. В одній з конструкцій, пріоритет користувача i може бути виражений як: Pr iorityi 35 40 45 50 55 гâíÿííÿ 30 Rsup ported ,i TPi , гâíÿííÿ 31 де Rsupported,i – максимальна швидкість передачі даних, що підтримується, для користувача i, TPi – середня пропускна здатність для користувача i, і Priorityi – пріоритет користувача i. Користувачі також можуть бути пріоритезовані іншими способами і/або на основі інших параметрів. У будь-якому випадку, користувачі можуть сортуватися на основі своїх пріоритетів. Навантаження Lavail_sched, яке є в розпорядженні, потім може розподілятися по відсортованих користувачах, один користувач за раз, починаючи з користувача найвищого пріоритету. Для користувача найвищого пріоритету, який повинен плануватися першим, максимальна швидкість передачі даних, що підтримується, Rsupported,i, для користувача може обчислюватися на основі інформації про розмір черги і запас потужності для користувача. Швидкість передачі даних, Rsched,i, може вибиратися для користувача на основі максимальної швидкості передачі даних, що підтримується, Rsupported,i, і навантаження Lavail_sched, яке є в розпорядженні. Швидкість передачі даних, що планується, є рівною або меншою, ніж максимальна швидкість передачі даних, що підтримується, і, крім того, обмежена навантаженням, яке є в розпорядженні. Навантаження користувача, що планується, Lsched,i, може обчислюватися на основі швидкості передачі даних, що планується, Rsched,i, та (Ecp/Nt)i у користувача. Різні швидкості передачі даних, що підтримуються, можуть бути асоціативно зв'язані з різними значеннями E c/Nt, а звідси, з різними значеннями T2P. Значення T2P для швидкості передачі даних, що планується, може визначатися, наприклад, за допомогою довідкової таблиці. Навантаження користувача, що планується, в такому випадку, може визначатися на основі значення T2P для швидкості передачі даних, що планується, і (Ecp/Nt)i користувача, наприклад, як показано в рівняннях (1) та (2). Навантаження Lavail_sched, яке є в розпорядженні, в такому випадку, може зменшуватися на навантаження Lsched,i користувача, що планується. Наступний користувач найвищого пріоритету може плануватися подібним чином. Послідовність операцій може повторюватися доти, доки не 10 UA 100246 C2 5 10 15 20 25 30 35 40 45 50 були заплановані все запитуючі користувачі, або навантаження L avail_sched, яке є в розпорядженні, не є нульовим або дуже малим. Фіг.5 показує структурну схему конструкції блока 500 для планування користувачів на висхідній лінії зв'язку. Навантаження LDPCH передач по виділених каналах може обчислюватися в блоці 514. Навантаження Lretran повторних передач чекаючих пакетів може обчислюватися в блоці 516. Навантаження Lautonomous автономних передач може обчислюватися в блоці 518. Навантаження виділених каналів, LDPCH, навантаження повторних передач, L retran, і навантаження автономних передач, Lautonomous можуть відніматися з навантаження стільника, Lavail_sched, яке є в розпорядженні, суматором 520 для одержання навантаження L avail_sched, яке є в розпорядженні, для планування користувачів. Для кожного користувача, що запитує передачу по висхідній лінії зв'язку, максимальна швидкість передачі даних, що підтримується, Rsupported,i, може обчислюватися блоком 522 на основі розміру черги, запасу потужності і (Ecp/Nt)i для користувача. Середня пропускна здатність кожного користувача може оновлюватися в блоці 524 будь-який раз, коли планується такий користувач. Пріоритет кожного користувача може визначатися в блоці 526, наприклад, як показано в рівнянні (31). Запитуючі користувачі можуть сортуватися на основі своїх пріоритетів в блоці 528. Після цього, для кожного користувача, який повинен плануватися, швидкість передачі даних, що планується, Rsched,i, може визначатися для користувача блоком 530 на основі максимальної швидкості передачі даних, що підтримується, для користувача і в цей час навантаження, яке є в розпорядженні, з селектора 534. Навантаження Lsched,i користувача, що планується, може визначатися блоком 532 на основі швидкості передачі даних, що планується, та іншої істотної інформації. Селектор 534 видає навантаження Lavail_sched, яке є в розпорядженні, з суматора 520 для першого користувача і видає оновлене навантаження, яке є в розпорядженні, із суматора 536 для кожного подальшого користувача. Суматор 536 віднімає навантаження користувача, що планується, Lsched,i, з навантаження Lavail_sched, яке є в розпорядженні, для оновлення навантаження, яке є в розпорядженні, для користувачів, що залишилися. У ще одному алгоритмі планування, кожному запитуючому користувачеві (або кожному користувачеві, запланованому в попередньому TTI) може призначатися резервна швидкість передачі даних, яка може бути більш низькою, ніж максимальна швидкість передачі даних, що підтримується, для такого користувача. В одній з конструкцій, резервна швидкість передачі даних для кожного користувача може бути однією швидкістю передачі даних нижче останньої запланованої швидкості передачі даних для такого користувача. Навантаження резервних швидкостей передачі даних для всіх користувачів може обчислюватися і відніматися з навантаження Lavail_sched, яке є в розпорядженні. Навантаження, яке є в розпорядженні, що залишилося, в такому випадку, може розподілятися по запитуючих користувачах в стільнику, наприклад, як описано вище. Цей алгоритм планування може гарантувати, що запитуючі користувачі (або користувачі, що раніше плануються,) наділяються щонайменше часткою своїх максимальних швидкостей передачі даних, що підтримуються. Інші схеми планування також можуть використовуватися для розподілу навантаження Lavail_sched, яке є в розпорядженні, по запитуючих користувачах. Наприклад, навантаження, яке є в розпорядженні, може розподілятися на основі схеми циклічного алгоритму, схеми пропорційної рівнодоступності, основаної на повідомленому запасі потужності, схеми пропорційної рівнодоступності, основаної на повідомлених запасі потужності і регулюванні потужності, схеми пропорційної рівнодоступності, основаної на повідомлених запасі потужності та якості сигналу, що приймається по низхідній лінії зв'язку, тощо. Стільник може зменшувати швидкості передачі даних користувачів, що не обслуговуються, які мають стільник в своїх наборах активних, але які не обслуговуються стільником. Цільове навантаження набору активних, LAS,target, може визначатися як мета для обох, навантаження всередині стільника, Lin_cell, і не обслуговуючого навантаження набору активних, L ns,AS. Діюче цільове навантаження набору активних, Leff_target,AS, із заглушенням взаємних перешкод може бути виражене як: 1 L eff _ t arg et _ AS L t arg et _ AS (1 ) L t arg et _ AS , гâíÿííÿ 32 1 f AS 55 де fAS - f-коефіцієнт набору активних, який може бути встановлений в 0,4 або деяке інше підходяще значення. Leff_target_AS визначатися в блоці 362 на фіг.3 або блоці 462 на фіг.4 на основі зумовленої Ltarget_AS, коефіцієнта ефективності IC, λ, та f-коефіцієнта набору активних. В одній з конструкцій, відносні надання для зменшення швидкостей передачі даних користувачів, що не обслуговуються, можуть формуватися блоком 512 на фіг.5, якщо задоволені наступні умови: 11 UA 100246 C2 ~ ~ ~ Lns, AS Lin cell L eff _ t arg et _ AS òà L ns, AS K ns, AS Lin cell , 5 10 15 20 25 30 35 40 45 50 55 60 гâíÿííÿ 33 де Kns,AS – коефіцієнт, що використовується для зменшення швидкостей передачі даних користувачів, що не обслуговуються. У конструкціях, показаних на фіг.3 та 4, не обслуговуюче навантаження Lns,AS набору активних може визначатися окремо і використовуватися для відправлення відносних надавань користувачам, що не обслуговуються. Швидкості передачі даних користувачів, що не обслуговуються, також можуть зменшуватися на основі інших умов і/або параметрів. Фіг.6 показує схему послідовності 600 операцій для планування користувачів у стільнику. Послідовність 600 операцій може виконуватися планувальником, який може бути розташований у Вузлі Б або контролері мережі. Може бути визначене діюче цільове навантаження для стільника, що використовує заглушення взаємних перешкод (етап 612). Діюче цільове навантаження може бути більш високим, ніж цільове навантаження для стільника без заглушення взаємних перешкод і може бути діючим цільовим навантаженням всередині стільника, Leff_target_in-cell, діючим цільовим повним навантаженням, Leff_target_total, тощо. Навантаження для стільника, яке є в розпорядженні, може визначатися на основі діючого цільового навантаження (етап 614). Користувачі в стільнику можуть плануватися на передачу по висхідній лінії зв'язку на основі навантаження, яке є в розпорядженні, (етап 616). Діюче цільове навантаження може визначатися на основі цільового RoT для стільникаі коефіцієнта ефективності заглушення взаємних перешкод. В одній з конструкцій, що стосується основаного на навантаженні планування, діюче цільове навантаження всередині стільника може визначатися на основі цільового RoT для стільника, f-коефіцієнта стільника і коефіцієнта ефективності заглушення взаємних перешкод, як показано на фіг.3 в рівняннях (9) та (12). Навантаження для стільника, яке є в розпорядженні, в такому випадку, може визначатися на основі діючого цільового навантаження всередині стільника, f-коефіцієнта стільника і навантаження всередині стільника для користувачів, що обслуговуються стільником, наприклад, як показано в рівнянні (14). Фіг.7 показує схему послідовності 700 операцій для визначення навантаження для стільника, яке є в розпорядженні, при основаному на RoT плануванні. Послідовність 700 операцій може використовуватися для етапів 612 та 614 на фіг.6. Коефіцієнт ефективності заглушення взаємних перешкод може визначатися на основі (i) виміряного I0 в стільнику без заглушення взаємних перешкод і (ii) залишкового I0 в стільнику після заглушення взаємних перешкод (етап 712). В одній з конструкцій, виміряний I0 може фільтруватися для одержання фільтрованого I0, наприклад, як показано в рівнянні (25). Залишковий I0 може фільтруватися для одержання діючого I0, наприклад, як показано в рівнянні (27). Коефіцієнт ефективності заглушення взаємних перешкод, в такому випадку, може визначатися на основі відношення діючого I 0 до фільтрованого I0, наприклад, як показано в рівнянні (28). Діюче цільове повне навантаження може визначатися на основі цільового RoT для стільника і коефіцієнта ефективності заглушення взаємних перешкод, наприклад, як показано в рівняннях (8) та (16) (етап 714). Повне навантаження стільника може визначатися на основі вимірювання RoT, наприклад, як показано в рівнянні (15) (етап 716). Навантаження всередині стільника для користувачів, що обслуговуються стільником, може визначатися на основі передач висхідної лінії зв'язку, прийнятих від цих користувачів (етап 718). Також може визначатися не обслуговуюче навантаження набору активних для користувачів, що не обслуговуються, які не обслуговуються стільником, але мають стільник в своїх наборах активних (етап 720). Зовнішнє навантаження, в такому випадку, може визначатися на основі повного навантаження стільника, навантаження всередині стільника і не обслуговуючого навантаження набору активних, наприклад, як показано в рівнянні (17) (етап 722). Навантаження для стільника, яке є в розпорядженні, може визначатися на основі діючого цільового повного навантаження для стільника, зовнішнього навантаження і не обслуговуючого навантаження набору активних, наприклад, як показано в рівнянні (21) (етап 724). Повертаючись до фіг.6, в одній із схем етапу 616, навантаження, яке є в розпорядженні, спочатку може розподілятися по передачах по виділених каналах, призначених користувачам, що обслуговуються стільником, повторних передачах чекаючих пакетів від користувачів, що обслуговуються, автономних передачах від користувачів, що обслуговуються і/або інших типах передач, раніше нових передач. Навантаження, зумовлене виділеними каналами, може визначатися і відніматися з навантаження, яке є в розпорядженні. Навантаження, зумовлене повторними передачами, може визначатися і відніматися з навантаження, яке є в розпорядженні. Навантаження, зумовлене автономними передачами, може визначатися і відніматися з навантаження, яке є в розпорядженні. Резервні швидкості передачі даних також можуть призначатися користувачам, що обслуговуються. Навантаження, зумовлене резервними 12 UA 100246 C2 5 10 15 20 25 30 35 40 45 50 55 60 швидкостями передачі даних, може визначатися і відніматися з навантаження, яке є в розпорядженні. Оновлене навантаження, яке є в розпорядженні, потім, може розподілятися по користувачах в стільнику. Фіг.8 показує схему послідовності 800 операцій для планування користувачів на основі навантаження, яке є в розпорядженні. Послідовність 800 операцій може використовуватися для етапу 616 на фіг.6. Пріоритети користувачів, які повинні бути заплановані в стільнику, можуть визначатися, наприклад, як показано в рівнянні (31), або на основі деякого іншого алгоритму (етап 812). Користувачі можуть сортуватися на основі своїх пріоритетів (етап 814). Навантаження, яке є в розпорядженні, потім може розподілятися по відсортованих користувачах, один користувач за раз. Користувач найвищого пріоритету може вибиратися першим (етап 816). Швидкість передачі даних може призначатися користувачеві, наприклад, на основі запасу потужності і розміру черги користувача, навантаження, яке є в розпорядженні, тощо. (етап 818). Навантаження користувача може визначатися на основі призначеної швидкості передачі даних та іншої істотної інформації (етап 820). Навантаження, яке є в розпорядженні, може оновлюватися відніманням навантаження користувача (етап 822). Якщо скільки-небудь навантаження, яке є в розпорядженні, всі ще залишилося, і якщо всі користувачі не були заплановані, як визначено на етапі 824, то послідовність операцій повертається на етап 816 для планування наступного користувача найвищого пріоритету. Інакше, послідовність операцій закінчується. Відносні надання також можуть формуватися для користувачів, що не обслуговуються, які мають стільник в своїх наборах активних. В одній з конструкцій, діюче цільове навантаження набору активних для користувачів, що не обслуговуються, може визначатися, наприклад, як показано в рівнянні (32). Відносні надання для користувачів, що не обслуговуються, можуть формуватися на основі діючого цільового навантаження набору активних, наприклад, як показано в рівнянні (33). Фіг.9 показує схему послідовності 900 операцій, що виконується UE. UE може відправляти запит на передачу по висхідній лінії зв'язку в стільник (етап 912). UE може приймати надання для передачі по висхідній лінії зв'язку із стільника, причому, надання визначається на основі навантаження для стільника, яке є в розпорядженні, (етап 914). Навантаження, яке є в розпорядженні, може визначатися на основі діючого цільового навантаження для стільника, що використовує заглушення взаємних перешкод. Діюче цільове навантаження може бути більш високим, ніж цільове навантаження для стільника без заглушення взаємних перешкод. UE може відправляти передачу по висхідній лінії зв'язку відповідно до надання (етап 916). UE може відправляти щонайменше один виділений канал у стільник. Навантаження, яке є в розпорядженні, може визначатися, крім того, на основі навантаження, зумовленого виділеними каналами всіх користувачів, що обслуговуються стільником. UE може відправляти повторну передачу чекаючого пакета в стільник. Навантаження, яке є в розпорядженні, може визначатися, крім того, на основі навантаження, зумовленого повторними передачами всіх користувачів, що обслуговуються стільником. UE може автономно відправляти передачу в стільник. Навантаження, яке є в розпорядженні, може визначатися, крім того, на основі навантаження, зумовленого автономними передачами всіх користувачів, що обслуговуються стільником. Фіг.10 показує структурну схему конструкції UE 120, яке може бути одним з UE на фіг.1. На висхідній лінії зв'язку, кодувальник 1012 може приймати інформацію даних і керування (наприклад, повідомлення інформації планування або запити планування), які повинні відправлятися за допомогою UE 120 по висхідній лінії зв'язку. Кодувальник 1012 може обробляти (наприклад, форматувати, кодувати і перемежовувати) інформацію даних і керування. Модулятор 1014 (Мод., Mod) може додатково обробляти (наприклад, модулювати, розділяти на окремі канали і скремблювати) кодовану інформацію даних і керування і видавати вихідні відліки. Передавач 1022 (TMTR) може приводити в потрібний стан (наприклад, перетворювати в аналогову форму, фільтрувати, посилювати і перетворювати з підвищенням частоти) вихідні відліки і формувати сигнал прямої лінії зв'язку, який може передаватися через антену 1024 на один або більше Вузлів Б. На низхідній лінії зв'язку, антена 1024 може приймати сигнали низхідної лінії зв'язку, передані одним або більше Вузлами Б. Приймач 1026 (RCVR) може приводити в потрібний стан (наприклад, фільтрувати, посилювати, перетворювати із зниженням частоти і відцифровувати) прийнятий сигнал з антени 1024 і видавати вхідні відліки. Демодулятор 1016 (Демод., Demod) може обробляти (наприклад, дескремблювати, розділяти на окремі канали і демодулювати) вхідні відліки і видавати оцінки символів. Декодер 1018 може додатково обробляти (наприклад, обернено перемежовувати і декодувати) оцінки символів і видавати декодовану інформацію даних і керування (наприклад, абсолютні і відносні надання), 13 UA 100246 C2 5 10 15 20 25 30 35 40 45 50 55 60 що відправляється на UE 120. Кодувальник 1012, модулятор 1014, демодулятор 1016 і декодер 1018 можуть бути реалізовані процесором 1010 модему. Ці блоки можуть виконувати обробку відповідно до технології радіозв'язку (наприклад, W-CDMA), що використовується системою бездротового зв’язку. Контролер/процесор 1030 може керувати роботою різних блоків в UE 120. Контролер/процесор 1030 може реалізовувати послідовність 900 операцій на фіг.9 і/або інші послідовності операцій для технологій, описаних в матеріалах даної заявки. Пам'ять 1032 може зберігати керуючі програми і дані для UE 120. Фіг.10 також показує структурну схему конструкції Вузлів Б 110a та 110b на фіг.1. Вузол Б 110a може підтримувати обслуговуючий стільник для UE 120, а Вузол Б 110b може підтримувати сусідній стільник або не обслуговуючий стільник набору активних для UE 120. У кожному Вузлі Б 110, передавач/приймач 1038 може підтримувати радіозв'язок з UE 120 та іншими UE. Контролер/процесор 1040 може виконувати різні функції для зв'язку з UE. Що стосується передачі висхідної лінії зв'язку, сигнал висхідної лінії зв'язку з UE 120 може прийматися і приводитися в потрібний стан приймачем 1038 і додатково оброблятися контролером/процесором 1040 для відновлення інформації даних і керування висхідної лінії зв'язку, відправленої UE. Що стосується передачі низхідної лінії зв'язку, інформація даних і керування може оброблятися контролером/процесором 1040 і приводитися в потрібний стан передавачем 1038 для формування сигналу низхідної лінії зв'язку, який може передаватися на UE. Пам'ять 1042 може зберігати керуючі програми і дані для Вузла Б. Блок 1044 зв'язку (Зв'язок, Comm) може підтримувати зв'язок з контролером 130 мережі. Фіг.10 також показує структурну схему конструкції контролера 130 мережі. У контролері 130 мережі, контролер/процесор 1050 можуть виконувати різні функції для підтримки служб зв'язку для UE. Пам'ять 1052 може зберігати керуючі програми і дані для контролера 130 мережі. Блок 1054 зв'язку може підтримувати зв'язок з Вузлами Б 110. Планування користувачів може виконуватися Вузлом Б 110a для обслуговуючого стільника, контролера 130 мережі або деякої іншої суті. Контролер/процесор 1040 або 1050 можуть реалізовувати послідовність 600 операцій на фіг.6, послідовність 700 операцій на фіг.7, послідовність 800 операцій на фіг.8, і/або інші послідовності операцій для технологій, описаних в матеріалах даної заявки. Контролер/процесор 1040 або 1050 також можуть реалізовувати блок 300 на фіг.3, блок 400 на фіг.4 і/або блок 500 на фіг.5. Фахівці в даній галузі техніки зрозуміли б, що інформація і сигнали можуть бути представлені з використанням будь-якої з різноманіття різних технологій і методик. Наприклад, дані, команди, директиви, інформація, сигнали, біти, символи і символи псевдошумової послідовності, які можуть вказуватися посиланням протягом всьому вищенаведеного опису, можуть бути представлені напругами, струмами, електромагнітними хвилями, магнітними полями або частинками, оптичними полями або частинками, або будь-якою їх комбінацією. Фахівці, крім того, брали б до уваги, що різні ілюстративні логічні блоки, модулі, схеми та етапи алгоритмів, описані в зв'язку розкриттям в матеріалах даної заявки, можуть бути реалізовані у вигляді електронних апаратних засобів, комп'ютерного програмного забезпечення або комбінацій обох. Щоб зрозуміло проілюструвати цю взаємозамінність апаратних засобів і програмного забезпечення, різні ілюстративні компоненти, блоки, модулі, схеми та етапи були описані вище, як правило, в показниках своїх функціональних можливостей. Чи реалізовані такі функціональні можливості у вигляді апаратних засобів або програмного забезпечення, залежить від конкретного застосування і проектних обмежень, що накладаються на всю систему. Кваліфіковані фахівці можуть реалізувати описані функціональні можливості відмінними способами для кожного конкретного застосування, але такі реалізаційні рішення не повинні інтерпретуватися як такі, що служать причиною виходу з обсягу даного розкриття. Різні ілюстративні логічні блоки, модулі і схеми, описані в зв'язку з розкриттям в матеріалах даної заявки, можуть бути реалізовані або виконуватися за допомогою процесора загального застосування, цифрового сигнального процесора (ЦСП, DSP), спеціалізованої інтегральної схеми (ASIC), програмованої користувачем вентильної матриці (FPGA) або іншого програмованого логічного пристрою, дискретної вентильної або транзисторної логіки, дискретних апаратних компонентів або будь-якої їх комбінації, призначеної для виконання функцій, описаних в матеріалах даної заявки. Процесором загального застосування може бути мікропроцесор, але, в альтернативному варіанті, процесором може бути будь-який традиційний процесор, контролер, мікроконтролер або кінцевий автомат. Процесор також може бути реалізований у вигляді комбінації обчислювальних пристроїв, наприклад, комбінації ЦСП і мікропроцесора, множини мікропроцесорів, одного або більше мікропроцесорів в з'єднанні з ЦСП-ядром, або будь-якої іншої такої конфігурації. 14 UA 100246 C2 5 10 15 20 25 30 35 40 45 50 55 60 Етапи способу або алгоритму, описані в зв'язку з розкриттям в матеріалах даної заявки, можу бути втілені безпосередньо в апаратних засобах, в модулі програмного забезпечення, що виконується процесором, або в комбінації цих двох. Модуль програмного забезпечення може знаходитися в пам'яті ОЗП (RAM, оперативного запам'ятовуючого пристрою), флеш-пам'яті, пам'яті ПЗП (ROM, постійного запам'ятовуючого пристрою), пам'яті СППЗП (EPROM, стираного програмованого ПЗП), пам'яті ЕСППЗУ (EEPROM, електрично стираного програмованого ПЗП), регістрах, на жорсткому диску, знімному диску, CD-ROM (ПЗП на компакт-диску) або будь-якому іншому різновиді запам'ятовуючого носія, відомому в даній галузі техніки. Зразковий запам'ятовуючий носій приєднаний до процесора, з умови щоб процесор міг зчитувати інформацію з і записувати інформацію на запам'ятовуючий носій. В альтернативному варіанті, запам'ятовуючий носій може бути таким, що становить одне ціле з процесором. Процесор і запам'ятовуючий носій можуть знаходитися в ASIC. ASIC може знаходитися в користувацькому терміналі. В альтернативному варіанті, процесор і запам'ятовуючий носій можуть знаходитися, як дискретні компоненти, в користувацькому терміналі. В одній або більше зразкових конструкцій, описані функції можуть бути реалізовані в апаратних засобах, програмному забезпеченні, апаратно-програмних засобах або будь-якій їх комбінації. Якщо реалізовані в програмному забезпеченні, функції можуть зберігатися в або передаватися у вигляді однієї або більше команд або машинної програми на машинозчитуваному носії. Машинозчитувані носії включають в себе як комп'ютерні запам'ятовуючі носії, так і середовище зв'язку, в тому числі, будь-який носій, який сприяє передачі комп'ютерної програми з одного місця в інше. Запам'ятовуючі носії можуть бути будьякими носіями, які є в розпорядженні, до яких може бути здійснений доступ комп'ютером загального застосування або спеціального призначення. Як приклад, а не обмеження, такі машинозчитувані носії можуть містити ОЗП, ПЗП, ЕСППЗП, CD-ROM або інший оптичний дисковий запам'ятовуючий пристрій, магнітний дисковий запам'ятовуючий пристрій або інші магнітні пристрої зберігання даних, або будь-який інший носій, який може використовуватися для перенесення або зберігання необхідного засобу керуючої програми у вигляді команд або структур даних, і до якого може здійснюватися доступ комп'ютером загального застосування або спеціального призначення, або процесором загального застосування або спеціального призначення. До того ж, будь-яке з'єднання, по суті, виражається машинозчитуваним носієм. Наприклад, якщо програмне забезпечення передається з веб-сайта, сервера або іншого віддаленого джерела з використанням коаксіального кабелю, волоконно-оптичного кабелю, витої пари, цифрової абонентської лінії (DSL), або бездротових технологій, таких як інфрачервона, радіочастотна і мікрохвильова, то коаксіальний кабель, волоконно-оптичний кабель, вита пара, DSL або бездротові технології, такі як інфрачервона, радіочастотна і мікрохвильова, включені у визначення носія. Диск і немагнітний диск, як такі, що використовуються в матеріалах даної заявки, включають в себе компакт-диск (CD), лазерний диск, оптичний диск, цифровий багатофункціональний диск (DVD), гнучкий магнітний диск і диск blu-ray, де диски звичайно відтворюють дані магнітним чином, нарівні з тим, що немагнітні диски відтворюють дані оптично за допомогою лазерів. Комбінації наведеного вище також повинні бути включені в обсяг машинозчитуваних носіїв. Попередній опис розкриття наведений, щоб дати будь-якому фахівцеві в даній галузі техніки можливість виготовити або використати розкриття. Різні модифікації відносно розкриття будуть без великих зусиль очевидні фахівцям в даній галузі техніки, а загальні принципи, визначені в матеріалах даної заявки, можуть застосовуватися до інших варіантів, не виходячи з обсягу розкриття. Таким чином, розкриття не вважається обмеженим прикладами і конструкціями, описаними в матеріалах даної заявки, але повинне бути узгодженим, найширшим обсягом, що не суперечить принципам і новітнім ознакам, розкритим в матеріалах даної заявки. Посилальні позиції 100 система бездротового зв’язку 102 географічна зона 110 вузли Б 120 обладнання користувача 130 контролер 1010 процесор 1012 кодувальник 1014 модулятор 1016 демодулятор 1018 декодер 1022 передавач 15 UA 100246 C2 5 1024 передавальна антена 1026 приймач 1030, 1040, 1050 контролер/процесор 1032, 1042, 1052 пам'ять 1038 передавач/приймач 1044, 1054 блок зв’язку ФОРМУЛА ВИНАХОДУ 10 15 20 25 30 35 40 45 50 55 60 1. Спосіб бездротового зв'язку, який полягає в тому, що: визначають діюче цільове навантаження для стільника, що використовує заглушення взаємних перешкод, при цьому діюче цільове навантаження є вищим, ніж цільове навантаження для згаданого стільника без заглушення взаємних перешкод; визначають навантаження для згаданого стільника, що є в розпорядженні, на основі діючого цільового навантаження; і планують користувачів в згаданому стільнику на передачу по висхідній лінії зв'язку на основі навантаження, що є в розпорядженні, причому визначення діючого цільового навантаження полягає в тому, що визначають діюче цільове навантаження на основі цільового перевищення рівня теплового шуму (RoT) для згаданого стільника і коефіцієнта ефективності заглушення взаємних перешкод. 2. Спосіб за п. 1, який додатково полягає в тому, що: вимірюють сумарні шум і взаємні перешкоди в згаданому стільнику без заглушення взаємних перешкод; визначають залишкові шум і взаємні перешкоди в згаданому стільнику після заглушення взаємних перешкод; і визначають коефіцієнт ефективності заглушення взаємних перешкод на основі виміряного сумарного шуму і взаємних перешкод, а також залишкового шуму і взаємних перешкод. 3. Спосіб за п. 2, в якому визначення коефіцієнта ефективності заглушення взаємних перешкод полягає в тому, що фільтрують виміряні сумарний шум і взаємні перешкоди для одержання фільтрованого шуму і взаємних перешкод, фільтрують залишкові шум і взаємні перешкоди для одержання діючого шуму і взаємних перешкод, і визначають коефіцієнт ефективності заглушення взаємних перешкод на основі відношення діючого шуму і взаємних перешкод до фільтрованого шуму і взаємних перешкод. 4. Спосіб за п. 1, в якому визначення навантаження, що є в розпорядженні, полягає в тому, що визначають навантаження для згаданого стільника, що є в розпорядженні, додатково, на основі навантаження всередині стільника для користувачів, що обслуговуються згаданим стільником. 5. Спосіб за п. 4, який додатково полягає в тому, що: визначають навантаження кожного користувача, що обслуговується згаданим стільником; і визначають навантаження всередині стільника на основі навантажень всіх користувачів, що обслуговуються згаданим стільником. 6. Спосіб за п. 5, в якому визначення навантаження кожного користувача, що обслуговується згаданим стільником, полягає в тому, що визначають відношення енергії пілот-сигналу на символ псевдошумової послідовності до сумарного шуму у користувача, визначають відношення повної енергії на символ псевдошумової послідовності до сумарного шуму у користувача на основі відношення енергії пілот-сигналу на символ псевдошумової послідовності до сумарного шуму і щонайменше одного з відношення трафіку до пілот-сигналу (Т2Р) і відношення службових сигналів до пілот-сигналу (О2Р) для користувача, і визначають навантаження користувача на основі відношення повної енергії на символ псевдошумової послідовності до сумарного шуму у користувача. 7. Спосіб за п. 1, в якому діюче цільове навантаження для згаданого стільника є діючим цільовим навантаженням всередині стільника для користувачів, що обслуговуються згаданим стільником, при цьому, визначення діючого цільового навантаження полягає в тому, що визначають діюче цільове навантаження всередині стільника на основі цільового перевищення рівня теплового шуму (RoT) для згаданого стільника, f-коефіцієнта стільника і коефіцієнта ефективності заглушення взаємних перешкод, і в якому визначення навантаження, що є в розпорядженні, полягає в тому, що визначають навантаження для згаданого стільника, що є в розпорядженні, на основі діючого цільового навантаження всередині стільника, f-коефіцієнта 16 UA 100246 C2 5 10 15 20 25 30 35 40 45 50 стільника і навантаження всередині стільника для користувачів, що обслуговуються згаданим стільником. 8. Пристрій для бездротового зв'язку, який містить: засіб для визначення діючого цільового навантаження для стільника, що використовує заглушення взаємних перешкод, при цьому діюче цільове навантаження є вищим, ніж цільове навантаження для згаданого стільника без заглушення взаємних перешкод; засіб для визначення навантаження для згаданого стільника, що є в розпорядженні, на основі діючого цільового навантаження; і засіб для планування користувачів в згаданому стільнику на передачу по висхідній лінії зв'язку на основі навантаження, що є в розпорядженні, причому пристрій виконаний з можливістю визначення діючого цільового навантаження на основі цільового перевищення рівня теплового шуму (RoT) для згаданого стільника і коефіцієнта ефективності заглушення взаємних перешкод. 9. Спосіб бездротового зв'язку, який полягає в тому, що: визначають залишкові шум і взаємні перешкоди в стільнику після виконання заглушення взаємних перешкод; і планують користувачів в згаданому стільнику на передачу по висхідній лінії зв'язку на основі залишкових шуму і взаємних перешкод. 10. Спосіб за п. 9, який додатково полягає в тому, що: вимірюють сумарний шум і взаємні перешкоди в згаданому стільнику без заглушення взаємних перешкод, і в якому планування користувачів полягає в тому, що планують користувачів, додатково, на основі виміряних сумарного шуму і взаємних перешкод. 11. Спосіб за п. 10, який додатково полягає в тому, що: фільтрують виміряні сумарний шум і взаємні перешкоди для одержання фільтрованого шуму і взаємних перешкод; фільтрують залишкові шум і взаємні перешкоди для одержання діючого шуму і взаємних перешкод; і визначають коефіцієнт ефективності заглушення взаємних перешкод на основі діючого шуму і взаємних перешкод, а також фільтрованого шуму і взаємних перешкод, і в якому планування користувачів полягає в тому, що планують користувачів, додатково, на основі коефіцієнта ефективності заглушення взаємних перешкод. 12. Спосіб бездротового зв'язку, який полягає в тому, що: відправляють запит на передачу по висхідній лінії зв'язку в стільник; приймають надання для передачі по висхідній лінії зв'язку зі згаданого стільника, при цьому надання визначають на основі навантаження для згаданого стільника, що є в розпорядженні, при цьому навантаження, що є в розпорядженні, визначають на основі діючого цільового навантаження для згаданого стільника, що використовує заглушення взаємних перешкод, і при цьому діюче цільове навантаження є вищим, ніж цільове навантаження для згаданого стільника без заглушення взаємних перешкод, причому діюче цільове навантаження визначають на основі цільового перевищення рівня теплового шуму (RoT) для згаданого стільника і коефіцієнта ефективності заглушення взаємних перешкод; і відправляють передачу по висхідній лінії зв'язку згідно з наданням. 13. Спосіб за п. 12, який додатково полягає в тому, що: відправляють щонайменше один виділений канал в згаданий стільник, при цьому, навантаження, що є в розпорядженні, визначають, додатково, на основі навантаження, обумовленого виділеними каналами користувачів, що обслуговуються згаданим стільником. 14. Машиночитаний носій, що містить збережені на ньому коди, які, при виконанні комп'ютером, приписують комп'ютеру виконувати спосіб за будь-яким з пп. 1-7. 15. Машиночитаний носій, який містить збережені на ньому коди, які, при виконанні комп'ютером, приписують комп'ютеру виконувати спосіб за будь-яким з пп. 9-11. 16. Машиночитаний носій, який містить збережені на ньому коди, які, при виконанні комп'ютером, приписують комп'ютеру виконувати спосіб за будь-яким з пп. 12 або 13. 17 UA 100246 C2 18 UA 100246 C2 19 UA 100246 C2 20 UA 100246 C2 21 UA 100246 C2 22 UA 100246 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 23
ДивитисяДодаткова інформація
Назва патенту англійськоюScheduling based on effective target load with interference cancellation in wireless communication system
Автори англійськоюZhang, Danlu, Mohanty, Bibhu, Sambhwani, Sharad Deepak
Назва патенту російськоюПланирование, основанное на действующей целевой нагрузке, с заглушением взаимных помех в системе беспроводной связи
Автори російськоюЧжан Даньлу, Моханти Бибху, Самбхвани Шарад Дипек
МПК / Мітки
МПК: H04W 72/00, H04W 16/10, H04W 16/14
Мітки: навантаженні, діючому, бездротового, зв'язку, цільовому, взаємних, системі, заглушенням, планування, основане, перешкод
Код посилання
<a href="https://ua.patents.su/25-100246-planuvannya-osnovane-na-diyuchomu-cilovomu-navantazhenni-iz-zaglushennyam-vzaehmnikh-pereshkod-u-sistemi-bezdrotovogo-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Планування, основане на діючому цільовому навантаженні, із заглушенням взаємних перешкод у системі бездротового зв’язку</a>
М’яка передача обслуговування із заглушенням перешкод у системі безпровідного зв’язку зі стрибкоподібним перестроюванням частоти
Номер патенту: 90451
Опубліковано: 11.05.2010
Автор: Агравал Авніш
МПК: H04B 7/00
Мітки: перешкод, безпровідного, заглушенням, м'яка, передача, системі, обслуговування, зв'язку, частоти, перестроюванням, стрибкоподібним
Формула / Реферат:
1. Спосіб прийому передач даних в системі безпровідного зв'язку, який полягає в тому, щоодержують прийняті символи для щонайменше однієї передачі даних в щонайменше одному первинному каналі трафіку від щонайменше одного первинного термінала і для щонайменше однієї передачі даних в щонайменше одному вторинному каналі трафіку від щонайменше одного вторинного термінала, при цьому щонайменше один первинний канал трафіку є ортогональним...
Оцінка шуму і взаємних перешкод у системі ofdm
Номер патенту: 90655
Опубліковано: 25.05.2010
Автори: Агравал Авніш, Сутівонг Арак, Наджиб Айман Фавзі
МПК: H04J 11/00
Мітки: перешкод, системі, оцінка, взаємних, шуму
Формула / Реферат:
1. Спосіб оцінки шуму у системі множинного доступу з ортогональним частотним розділенням сигналів (OFDM), спосіб включає в себе етапи, на яких:приймають символи OFDM; ірозпізнають прийняту потужність у смузі частот невиділеної допоміжної несучої частоти.2. Спосіб за п. 1, який також містить етап, на якому усереднюють прийняту потужність за допомогою щонайменше одного раніше збереженого вимірювання потужності для смуги...
Постійне ослаблення перешкод в системі бездротового зв’язку
Номер патенту: 96377
Опубліковано: 25.10.2011
Автори: Кхандекар Аамод, Паланкі Раві, Бхушан Нага
МПК: H04W 28/06, H04W 28/00
Мітки: бездротового, постійне, системі, зв'язку, перешкод, ослаблення
Формула / Реферат:
1. Спосіб бездротового зв'язку, який включає етап, на якомувідправляють запит для зменшення перешкод щонайменше однієї станції, що здійснює перешкоди, причому запит є дійсним протягом періоду часу, що охоплює множину періодів відповіді, кожна станція, що здійснює перешкоди, має можливість схвалити або відхилити запит в кожному періоді відповіді.2. Спосіб за п. 1, який додатково включає етап, на якомуформують запит таким...
Нульові пілот-сигнали для виконання оцінки перешкод в системі бездротового зв’язку
Номер патенту: 96539
Опубліковано: 10.11.2011
Автори: Горохов Алєксєй Ю., Кхандекар Аамод Д., Цзи Тінфан, Бхушан Нага, Борран Мохаммад Дж., Агравал Авніш
МПК: H04W 72/00
Мітки: нульові, перешкод, системі, виконання, оцінки, зв'язку, бездротового, пілот-сигнали
Формула / Реферат:
1. Спосіб підтримки оцінки перешкод в мережі бездротового зв'язку, що включає:визначення ресурсів для передачі нульового пілот-сигналу чарункою в кластері чарунок; іпередачу нульового пілот-сигналу на згаданих ресурсах чарункою, щоб дозволити користувацьким терміналам (UE) оцінювати позакластерні перешкоди, що містять перешкоди від чарунок, що не належать їх кластеру.2. Спосіб за п. 1, в якому кожній чарунці в кластері...
Спосіб (варіанти) і пристрій (варіанти) для використання індикації завантаження для зменшення перешкод в системі бездротового зв’язку
Номер патенту: 98979
Опубліковано: 10.07.2012
Автори: Кхандекар Аамод, Цзи Тінфан, Агравал Авніш
МПК: H04W 72/00
Мітки: бездротового, спосіб, зв'язку, зменшення, завантаження, пристрій, варіанти, використання, системі, перешкод, індикації
Формула / Реферат:
1. Спосіб бездротового зв'язку, який включає етапи:прийом індикації навантаження в преамбулі кадру від базової станції; і визначення, чи виконувати зменшення перешкод, на основі індикації навантаження від базової станції.2. Спосіб за п. 1, в якому визначення, чи виконувати зменшення перешкод, містить визначення, чи одержувати зарезервовані ресурси, що мають зменшену перешкоду, на основі індикації навантаження.3....
Попередній патент: Рідка форма г-ксф
Наступний патент: Конструкція бойлера
Випадковий патент: Мастилоуловлювач потужних електричних машин