Система безпровідного зв’язку з конфігурованою довжиною циклічного префікса
Номер патенту: 102074
Опубліковано: 10.06.2013
Автори: Муралі Рамасвамі, Малладі Дурга П., Агравал Авніш, Мантраваді Ашок, Стамоуліс Анастасіос
Формула / Реферат
1. Пристрій зв'язку, що містить
контролер для визначення очікуваних зон покриття для множини передач, які повинні передаватися в множині часових інтервалів, і для вибору довжин циклічного префікса для множини передач на основі метрики робочої характеристики; і
модулятор для обробки множини передач на основі вибраних довжин циклічного префікса.
2. Пристрій за п. 1, в якому контролер визначає метрику робочої характеристики й вибирає довжини циклічного префікса в кожному часовому інтервалі заздалегідь визначеної тривалості.
3. Пристрій за п. 1, в якому метрика робочої характеристики є відношенням сигналу до шуму й перешкоди.
4. Пристрій за п. 1, в якому контролер вибирає довжину циклічного префікса з множини довжин циклічного префікса для кожної з множини передач на основі метрики робочої характеристики для передачі.
5. Пристрій за п. 1, в якому контролер вибирає довжини циклічного префікса для множини передач додатково на основі пілот-сигналу, мультиплексованого із частотним розділенням (FDM), переданого з множиною передач.
6. Пристрій за п. 1, в якому контролер вибирає пілот-сигнал зі зсувом з множини пілот-сигналів зі зсувами, причому модулятор додатково обробляє вибраний пілот-сигнал зі зсувом.
7. Пристрій за п. 6, в якому пілот-сигнал зі зсувом циклічно змінюється по множині піддіапазонів.
8. Пристрій за п. 6, в якому пілот-сигнал зі зсувом вибирається на основі метрики.
9. Пристрій за п. 6, в якому пілот-сигнал зі зсувом вибирається на основі очікуваних зон покриття.
10. Пристрій за п. 7, в якому множини піддіапазонів рівномірно розподілені.
11. Пристрій зв'язку, що містить
засіб для визначення очікуваних зон покриття для множини передач, які повинні передаватися в множині часових інтервалів, і для вибору довжин циклічного префікса для множини передач на основі метрики робочої характеристики; і
засіб для обробки множини передач на основі вибраних довжин циклічного префікса.
12. Пристрій за п. 11, що додатково містить засіб для визначення метрики робочої характеристики й вибору довжин циклічного префікса в кожному часовому інтервалі заздалегідь визначеної тривалості.
13. Пристрій за п. 11, в якому метрика робочої характеристики є відношенням сигналу до шуму й перешкоди.
14. Пристрій за п. 11, в якому засіб для визначення вибирає довжину циклічного префікса з множини довжин циклічного префікса для кожної з множини передач на основі метрики робочої характеристики для передачі.
15. Пристрій за п. 11, в якому засіб для визначення вибирає довжини циклічного префікса для множини передач додатково на основі пілот-сигналу, мультиплексованого із частотним розділенням (FDM), переданого з множиною передач.
16. Пристрій за п. 11, в якому засіб для визначення вибирає пілот-сигнал зі зсувом з множини пілот-сигналів зі зсувами, причому модулятор додатково обробляє вибраний пілот-сигнал зі зсувом.
17. Пристрій за п. 16, в якому пілот-сигнал зі зсувом циклічно змінюється по множині піддіапазонів.
18. Пристрій за п. 16, в якому пілот-сигнал зі зсувом вибирається на основі метрики.
19. Пристрій за п. 16, в якому пілот-сигнал зі зсувом вибирається на основі очікуваних зон покриття.
20. Пристрій за п. 17, в якому множини піддіапазонів рівномірно розподілені.
21. Спосіб зв'язку, що містить
визначення очікуваних зон покриття для множини передач, які повинні передаватися в множині часових інтервалів, і вибір довжин циклічного префікса для множини передач на основі метрики робочої характеристики; і
обробку множини передач на основі вибраних довжин циклічного префікса.
22. Спосіб за п. 21, який додатково містить визначення метрики робочої характеристики й вибір довжин циклічного префікса в кожному часовому інтервалі заздалегідь визначеної тривалості.
23. Спосіб за п. 21, в якому метрика робочої характеристики є відношенням сигналу до шуму й перешкоди.
24. Спосіб за п. 21, який додатково містить вибір довжини циклічного префікса з множини довжин циклічного префікса для кожної з множини передач на основі метрики робочої характеристики для передачі.
25. Спосіб за п. 21, який додатково містить вибір довжин циклічного префікса для множини передач додатково на основі пілот-сигналу, мультиплексованого із частотним розділенням (FDM), переданого з множиною передач.
26. Спосіб за п. 21, який додатково містить вибір пілот-сигналу зі зсувом з множини пілот-сигналів зі зсувами, причому модулятор додатково обробляє вибраний пілот-сигнал зі зсувом.
27. Спосіб за п. 26, в якому пілот-сигнал зі зсувом циклічно змінюється по множині піддіапазонів.
28. Спосіб за п. 26, в якому пілот-сигнал зі зсувом вибирається на основі метрики.
29. Спосіб за п. 26, в якому пілот-сигнал зі зсувом вибирається на основі очікуваних зон покриття.
30. Спосіб за п. 27, в якому множини піддіапазонів рівномірно розподілені.
31. Машиночитаний носій, який містить:
код для спонукання комп'ютера визначати очікувані зони покриття для множини передач, які повинні передаватися в множині часових інтервалів, і для вибору довжин циклічного префікса для множини передач на основі метрики робочої характеристики; і
код для спонукання комп'ютера обробляти множину передач на основі вибраних довжин циклічного префікса.
32. Машиночитаний носій за п. 31, який додатково містить код для визначення метрики робочої характеристики й вибору довжин циклічного префікса в кожному часовому інтервалі заздалегідь визначеної тривалості.
33. Машиночитаний носій за п. 31, в якому метрика робочої характеристики є відношенням сигналу до шуму й перешкоди.
34. Машиночитаний носій за п. 31, який додатково містить код для вибору довжини циклічного префікса з множини довжин циклічного префікса для кожної з множини передач на основі метрики робочої характеристики для передачі.
35. Машиночитаний носій за п. 31, який додатково містить код для вибору довжин циклічного префікса для множини передач додатково на основі пілот-сигналу, мультиплексованого із частотним розділенням (FDM), переданого з множиною передач.
36. Машиночитаний носій за п. 31, який додатково містить код для вибору пілот-сигналу зі зсувом з множини пілот-сигналів зі зсувами, причому модулятор додатково обробляє вибраний пілот-сигнал зі зсувом.
37. Машиночитаний носій за п. 36, причому пілот-сигнал зі зсувом циклічно змінюється по множині піддіапазонів.
38. Машиночитаний носій за п. 36, причому пілот-сигнал зі зсувом вибирається на основі метрики.
39. Машиночитаний носій за п. 36, причому пілот-сигнал зі зсувом вибирається на основі очікуваних зон покриття.
40. Машиночитаний носій за п. 37, причому множини піддіапазонів рівномірно розподілені.
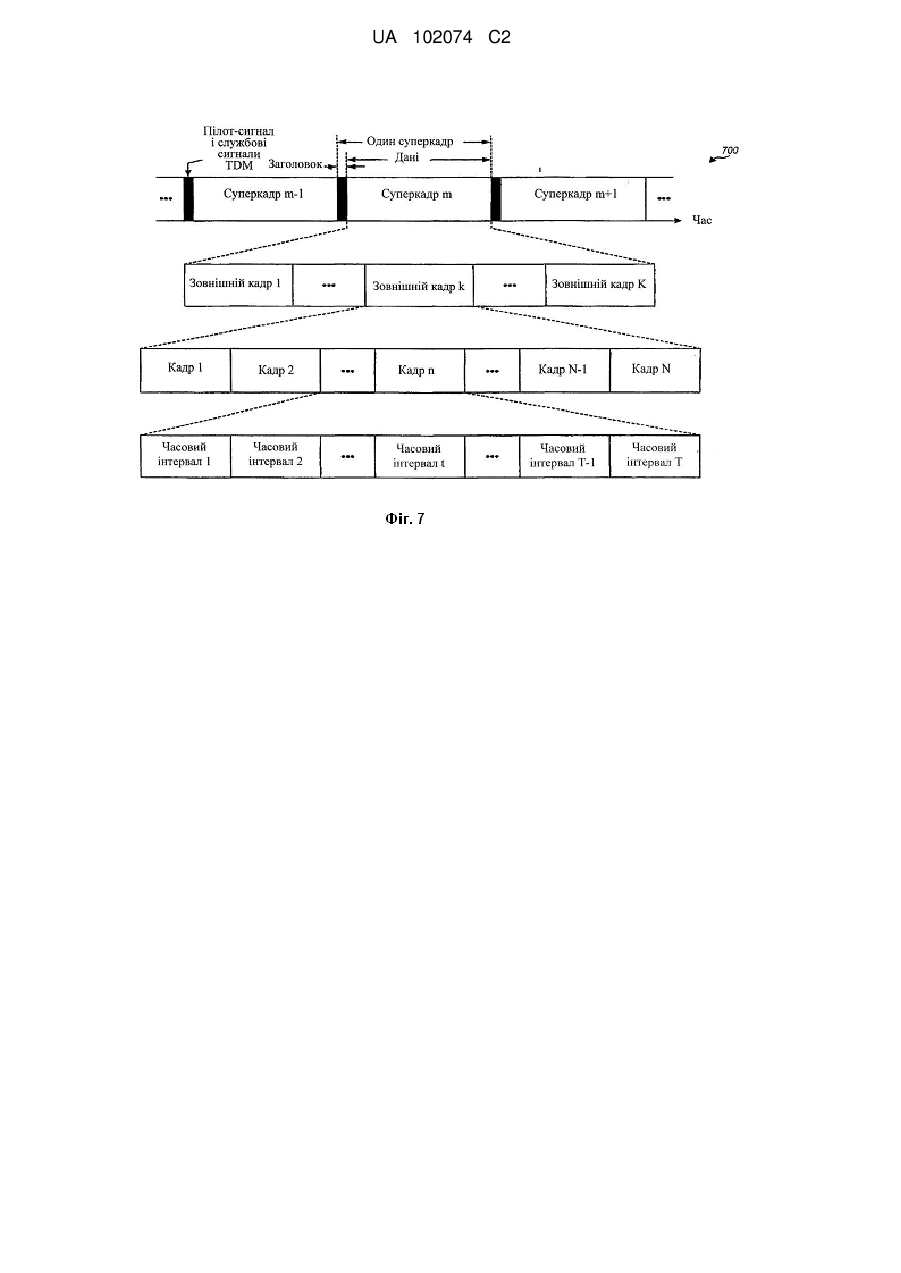
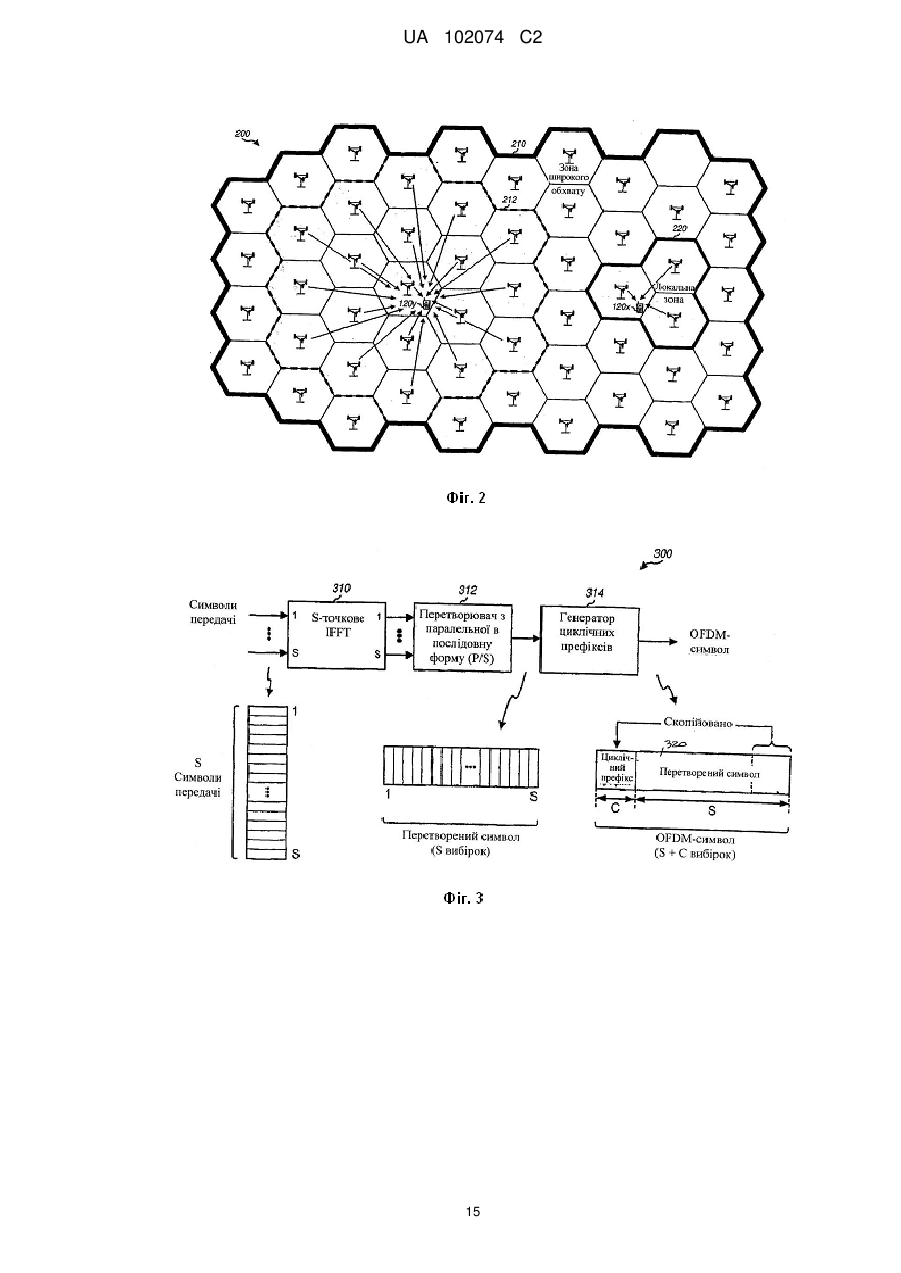
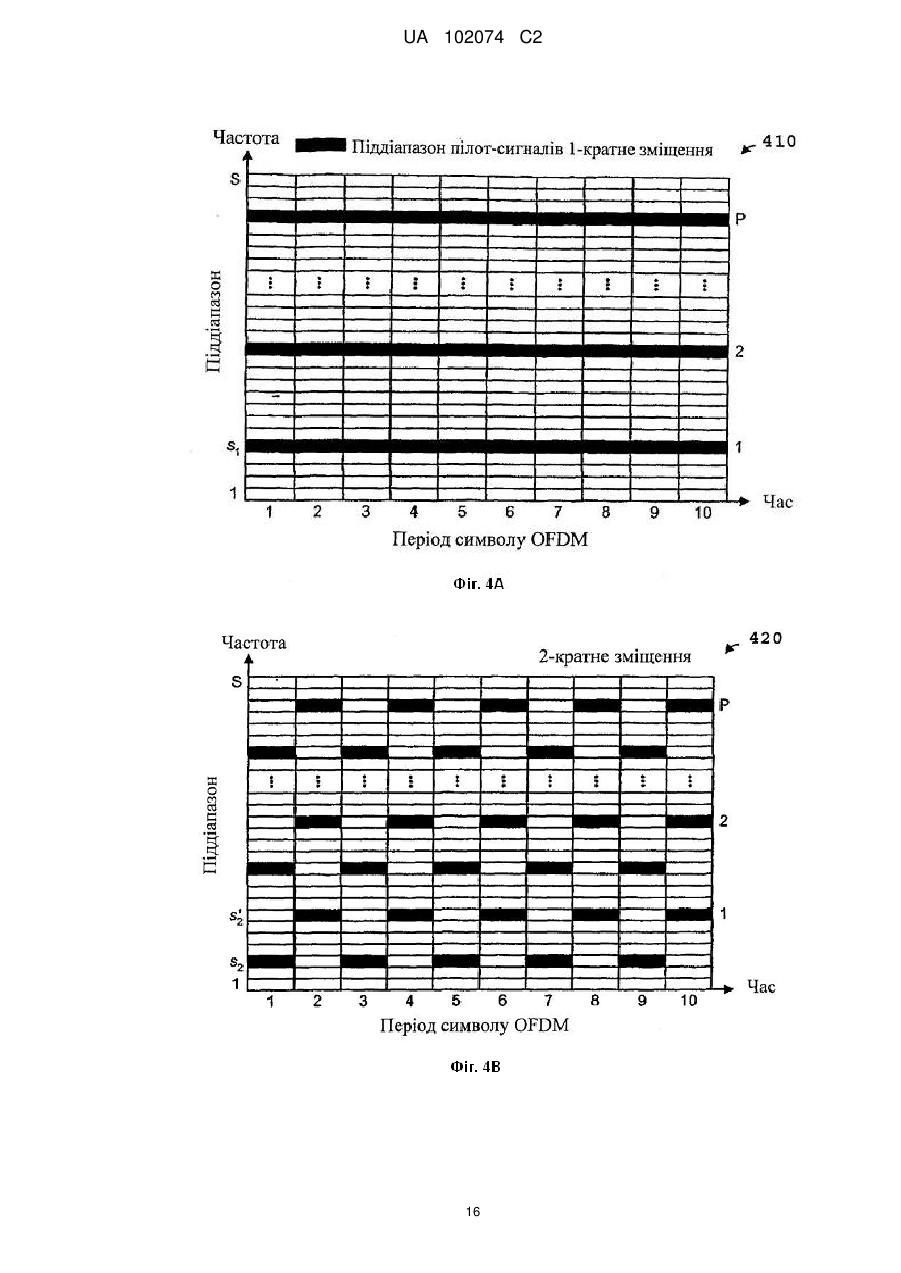
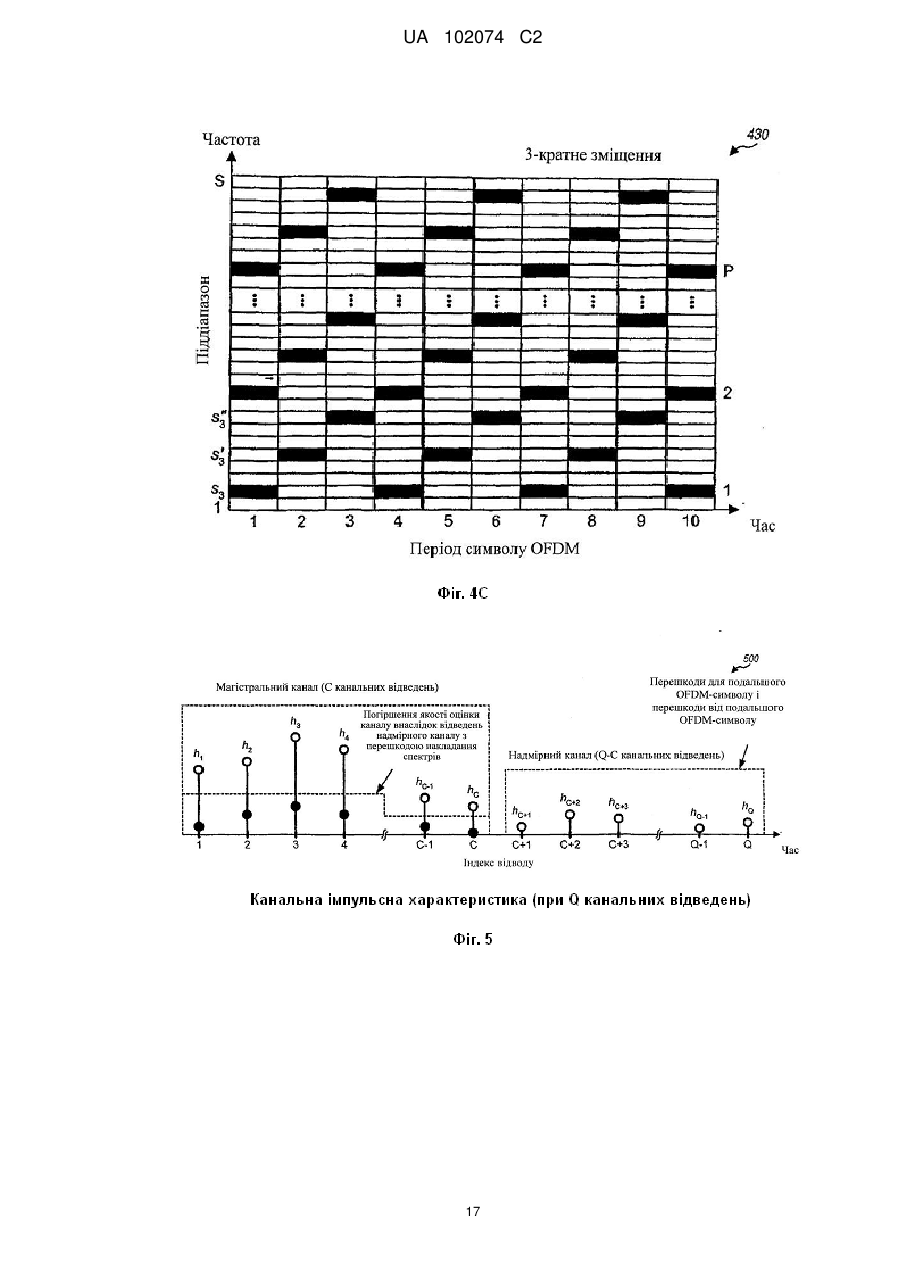
Текст
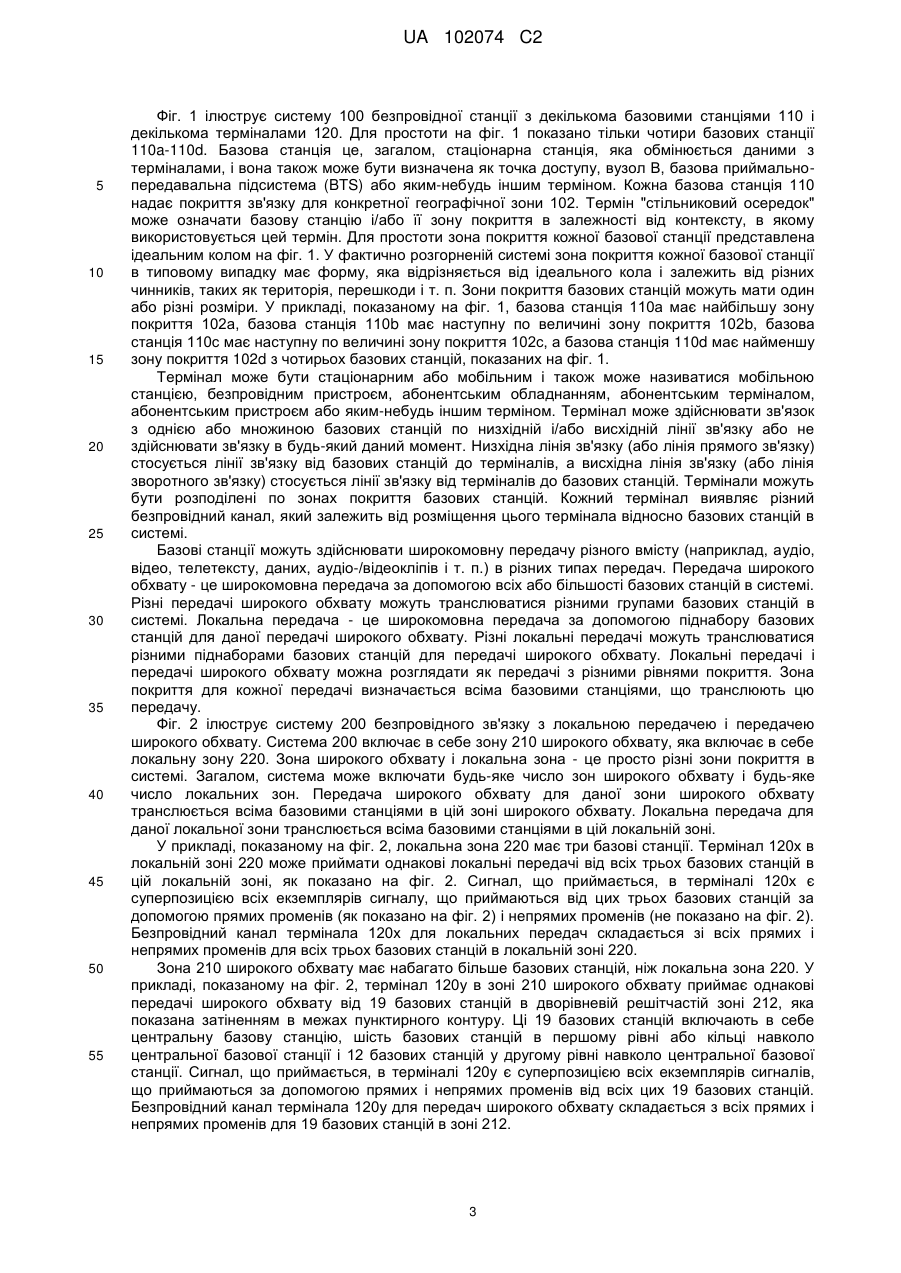
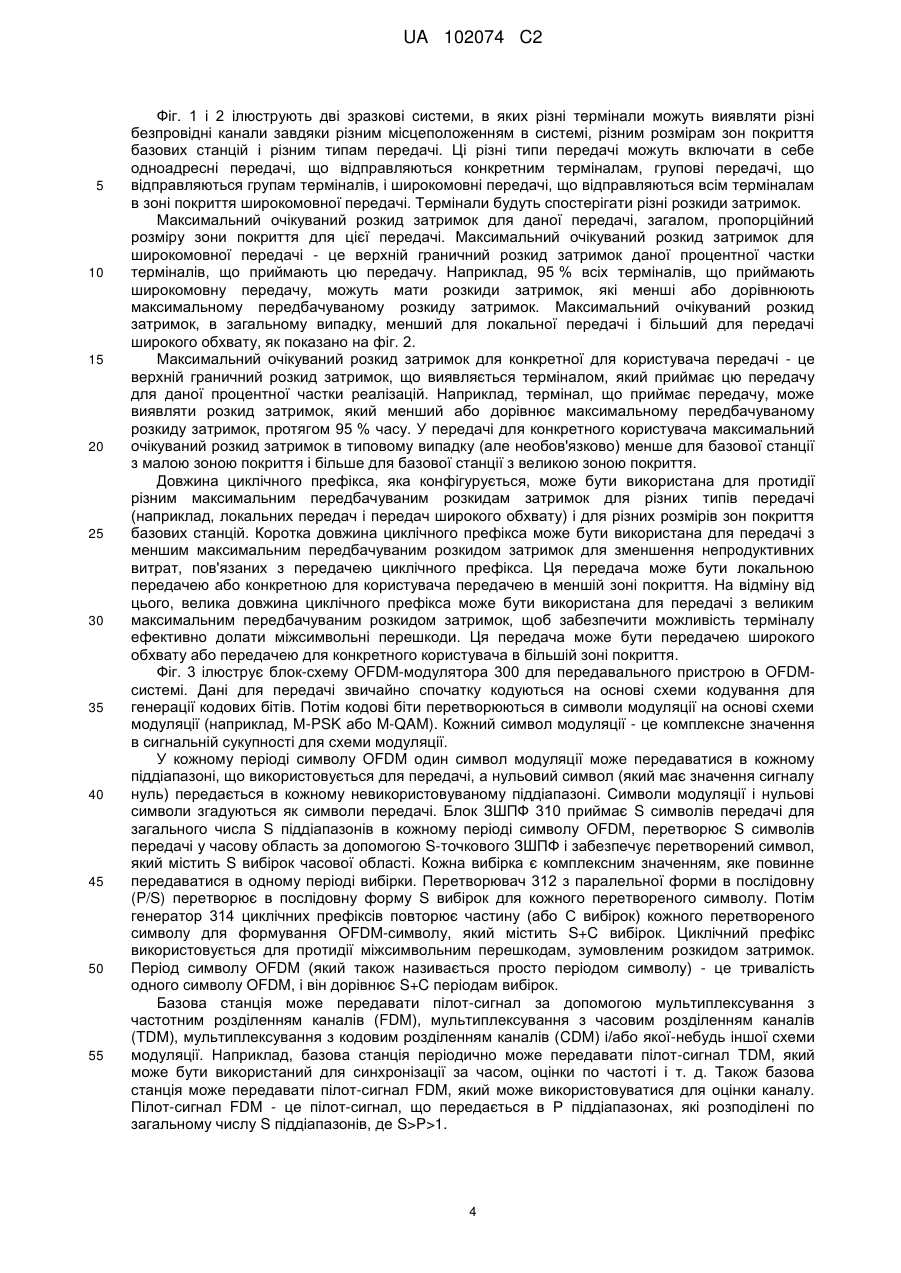
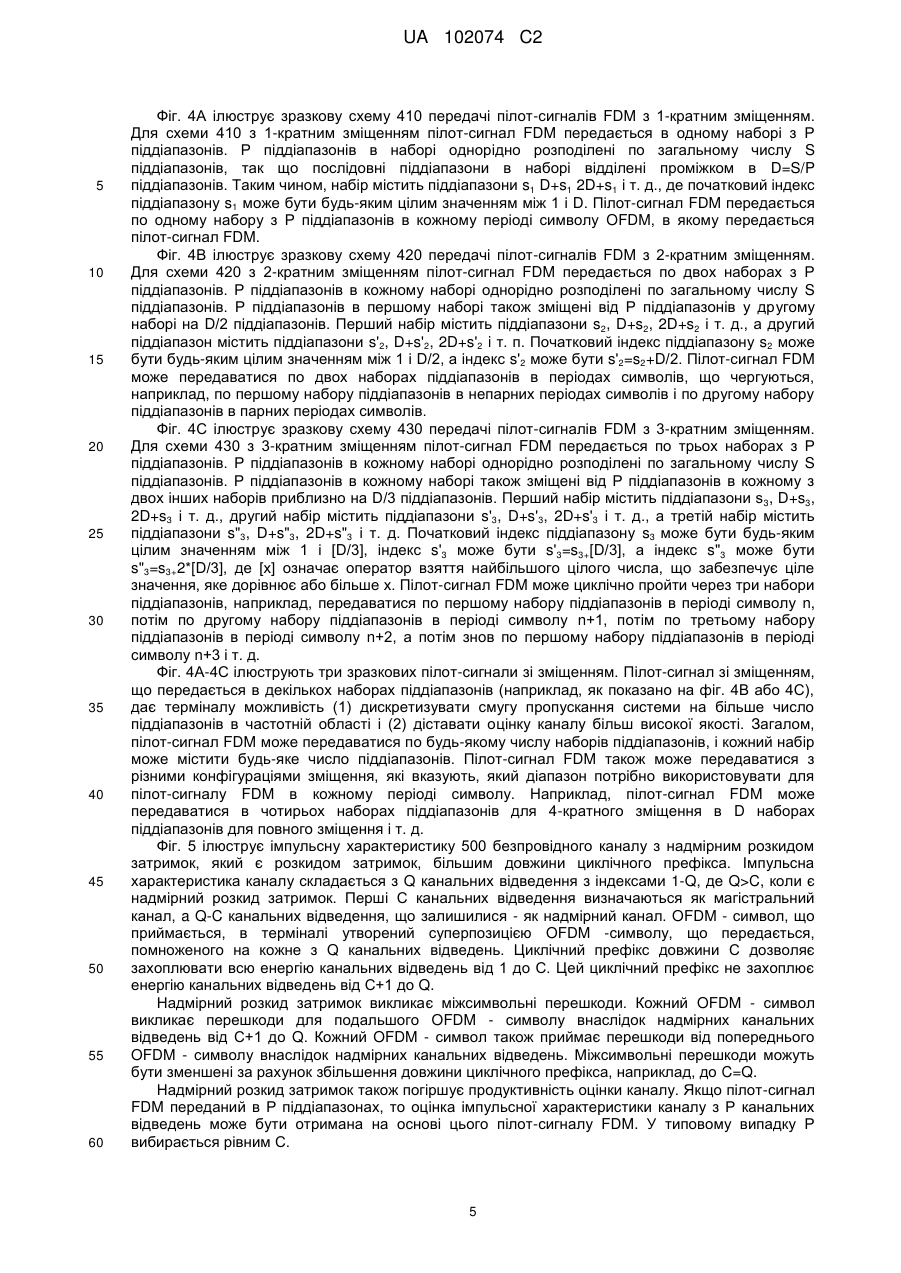
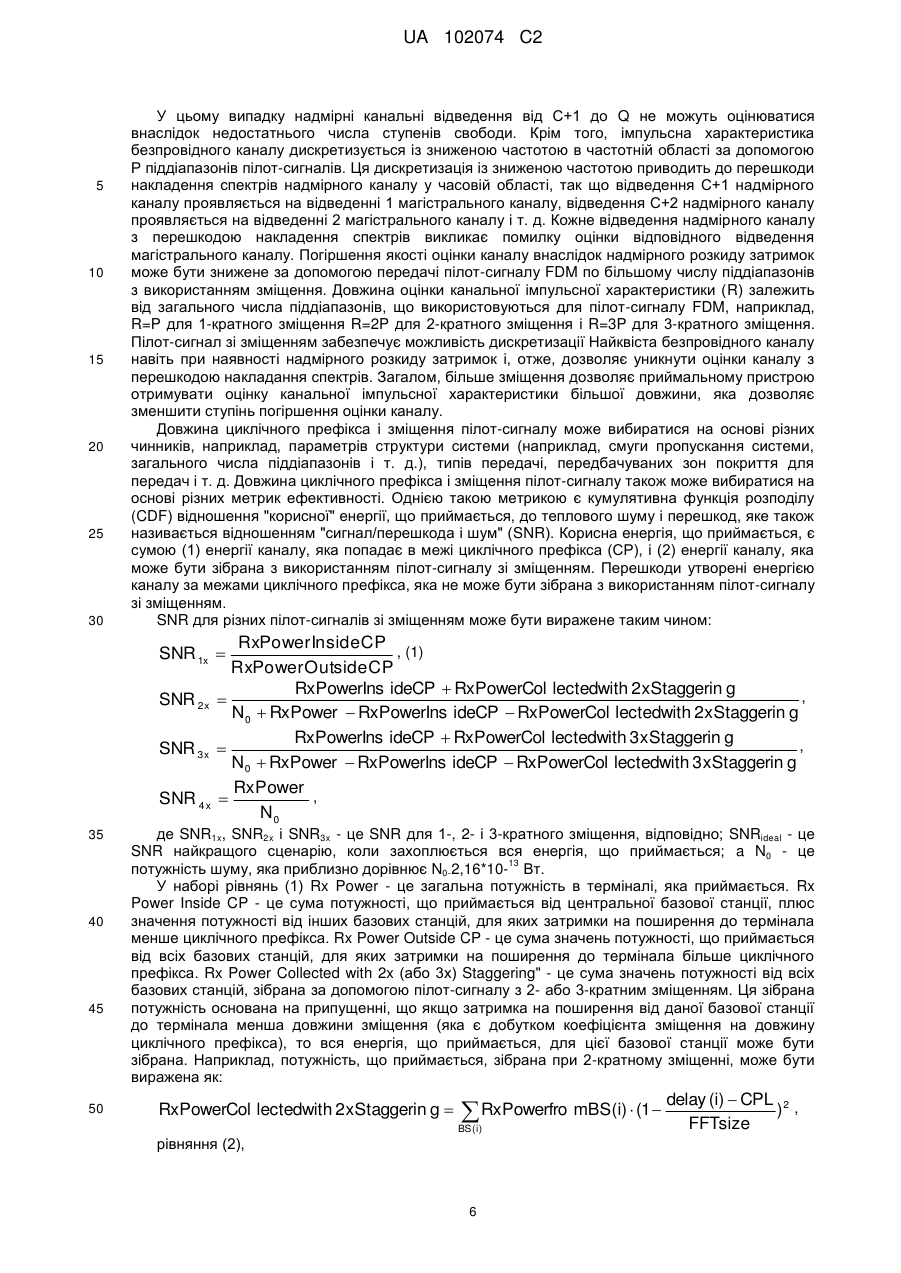
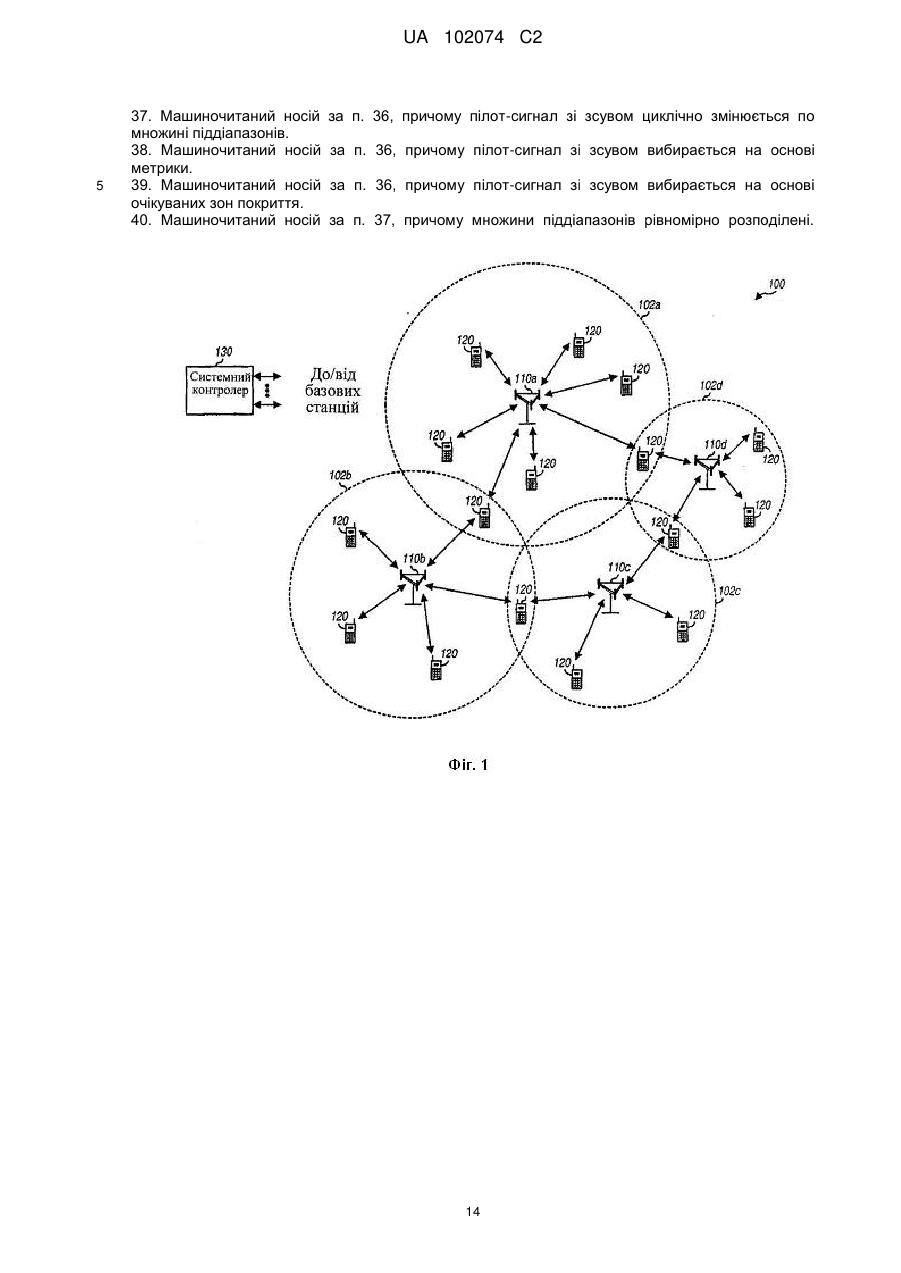
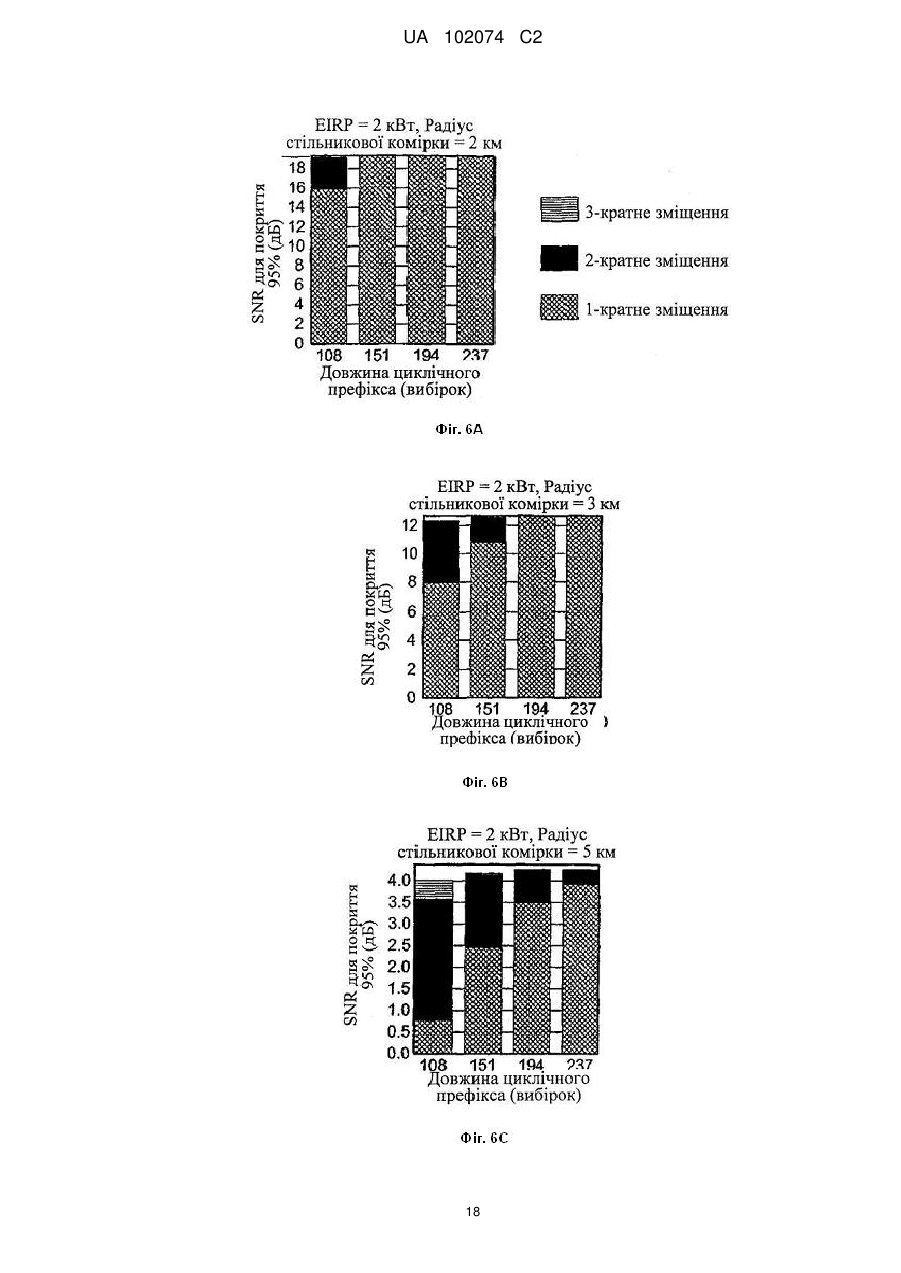
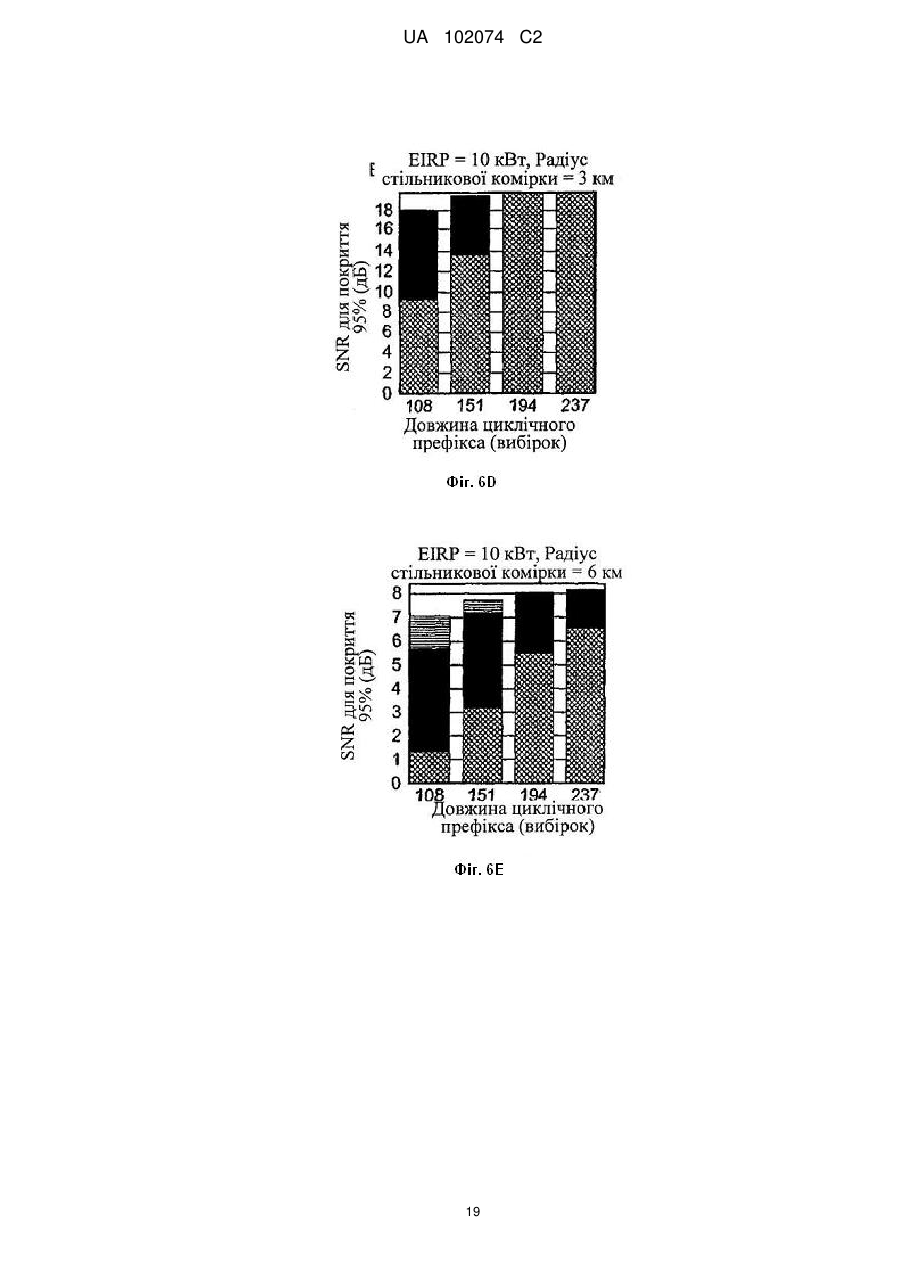
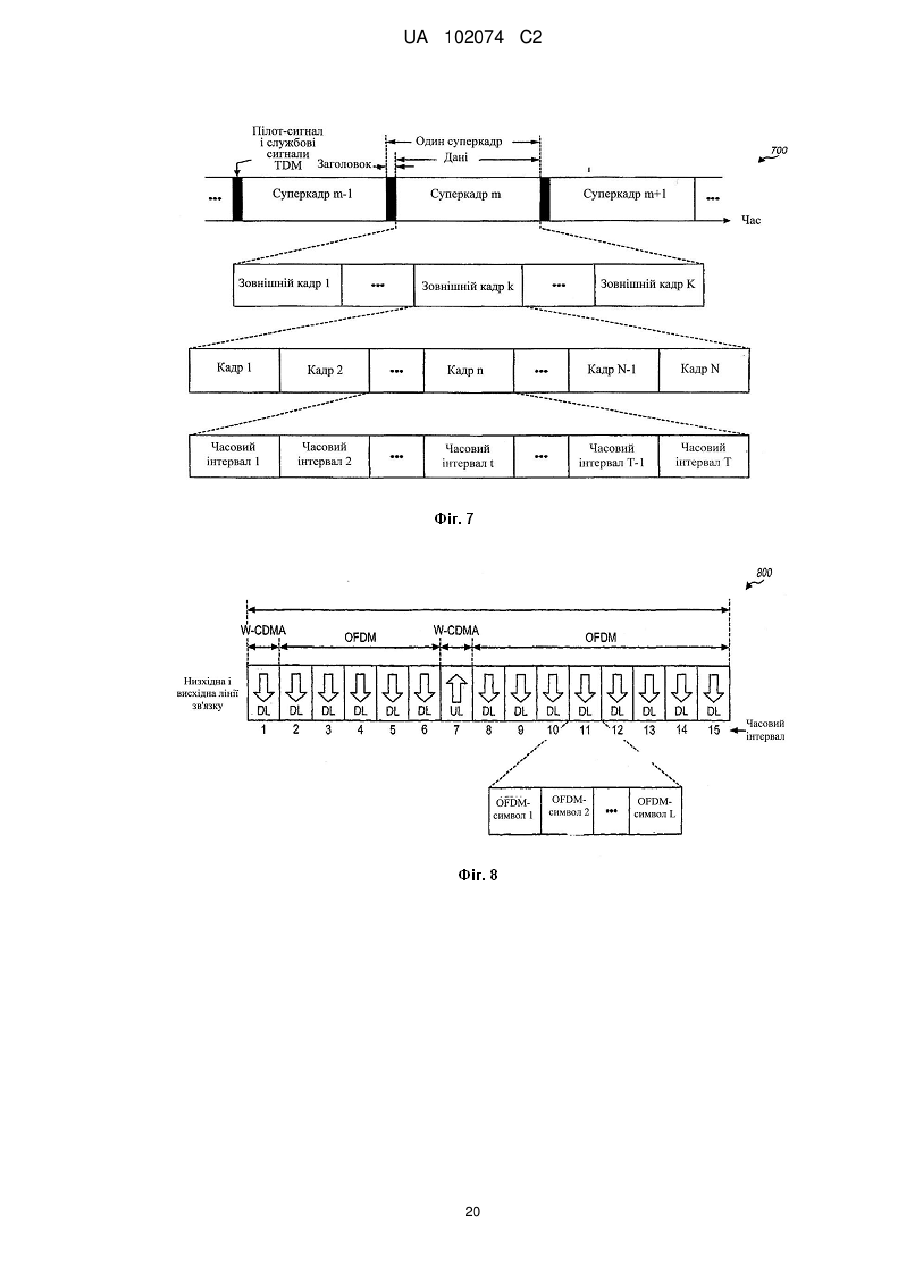
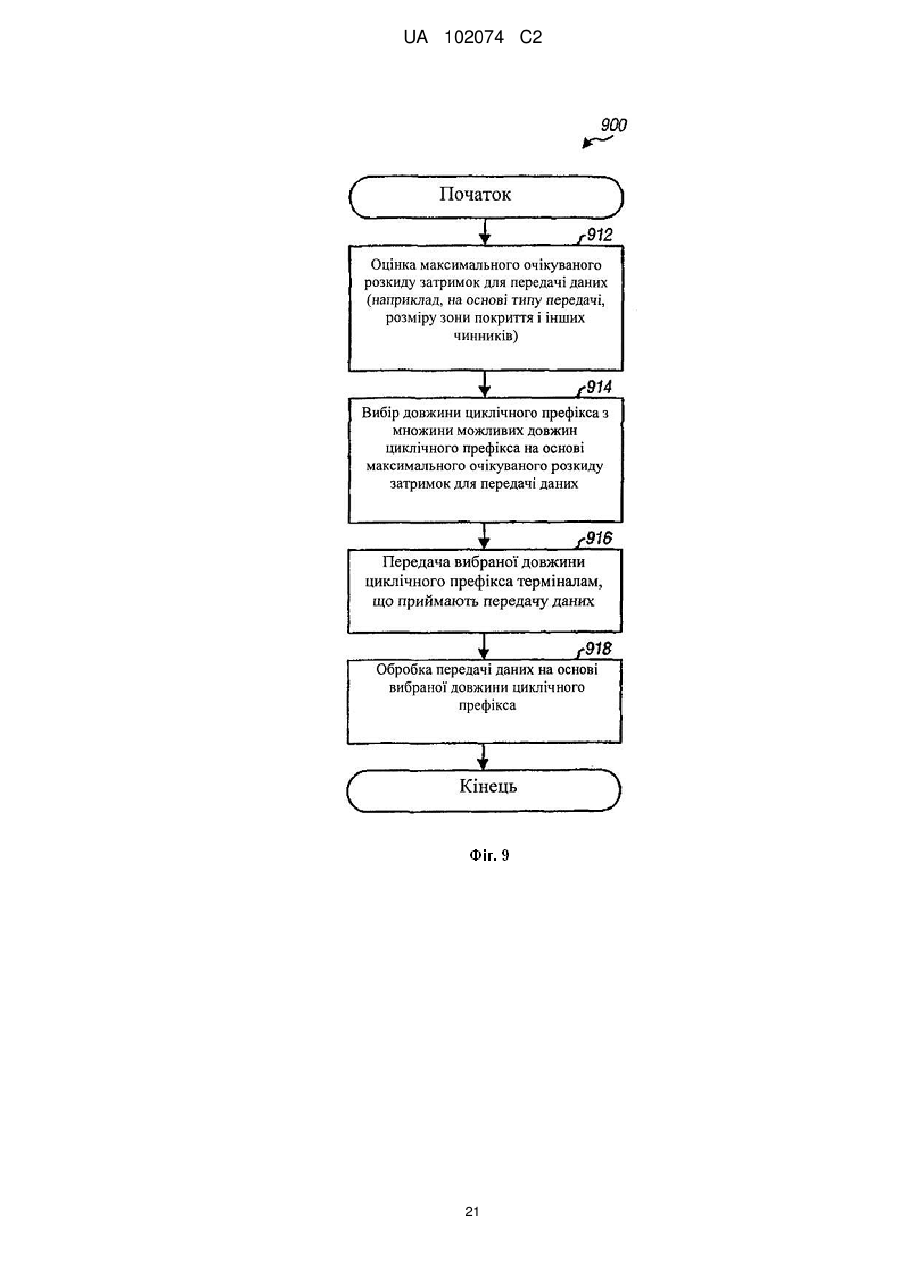
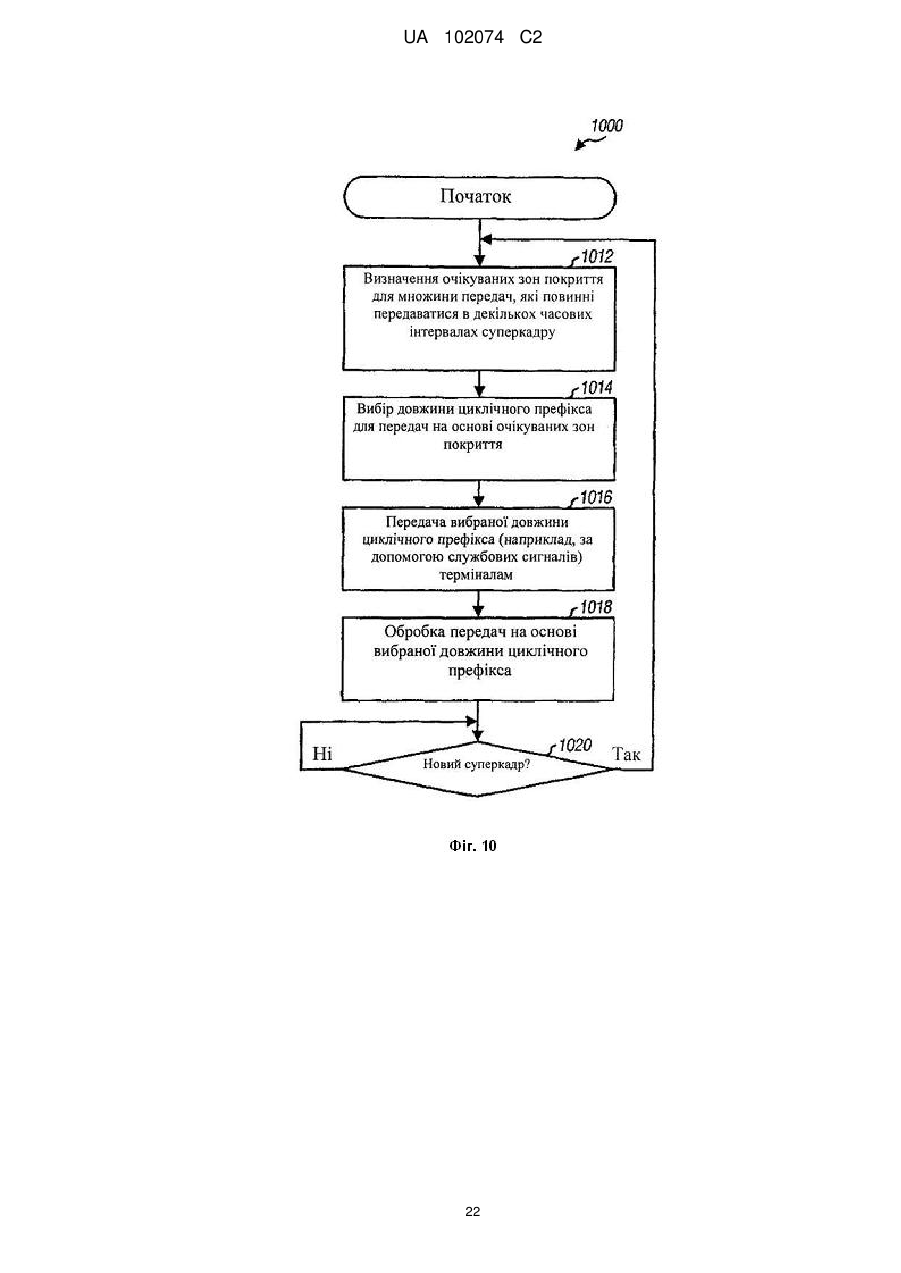
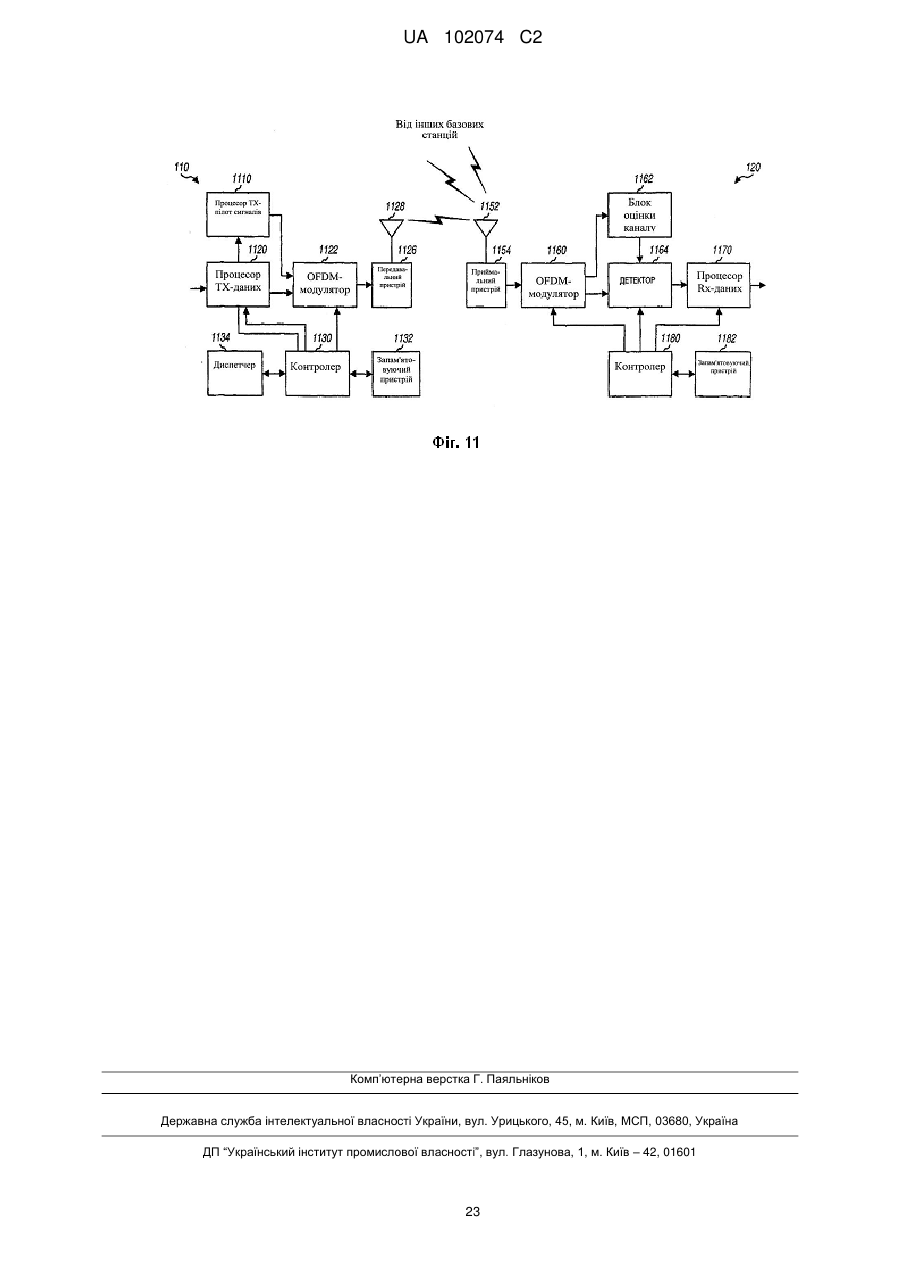
Реферат: Для передачі даних способом, що дозволяє знизити негативний вплив розкиду затримок, спочатку визначаються очікувані зони покриття для множини передач, які повинні передаватися в декількох часових інтервалах. Довжина циклічного префікса для цих передач вибирається на основі очікуваних зон покриття. Довжина циклічного префікса для кожної передачі може вибиратися з набору дозволених довжин циклічного префікса на основі очікуваної зони покриття цієї передачі, зсуву пілот-сигналу, використовуваного для передачі, і т. д. Наприклад, менша довжина циклічного префікса може вибиратися для кожної локальної передачі, і більша довжина префікса може вибиратися для кожної передачі широкого охоплення. Вибрана довжина циклічного префікса може передаватися терміналам. Передачі обробляються (наприклад, виконується OFDM-модуляція) на основі вибраної довжини циклічного префікса. Довжина циклічного префікса може вибиратися періодично, наприклад, у кожному суперкадрі. UA 102074 C2 (12) UA 102074 C2 UA 102074 C2 5 10 15 20 25 30 35 40 45 50 55 60 Дана Заявка на патент заявляє пріоритет Попередньої заявки № 60/577083, озаглавленої "FLO-TDD Physical Layer", зареєстрованої 4 червня 2004 року і переуступленої правонаступнику даної заявки і включеної в неї за допомогою посилання. Даний винахід стосується систем зв'язку, і більш конкретно, способів передачі даних в системі безпровідного зв'язку. Системи безпровідного зв'язку широко використовуються для надання різних послуг зв'язку, наприклад, мовної передачі пакетних даних, широкомовної передачі мультимедійних даних, текстових повідомлень і т. п. Ці системи можуть використовувати мультиплексування з ортогональним частотним розділенням сигналів (OFDM), яке є методом модуляції з множиною несучих, який дозволяє забезпечувати хорошу продуктивність в багатьох безпровідних середовищах. OFDM розбиває загальну ширину смуги системи на множину (S) ортогональних частотних піддіапазонів. Ці піддіапазони також називаються тонами, піднесучими, елементами дозволу і частотними каналами. У OFDM кожний піддіапазон пов'язаний з відповідною несучою, яка може бути модульована даними. До S символів модуляції можна передавати по S піддіапазонах в кожному періоді символів OFDM. До передачі символи модуляції перетворюються у часову область за допомогою S-точкового зворотного швидкого перетворення Фур'є (ЗШПФ) для генерування перетвореного символу, який містить S вибірок часової області. Ключовим атрибутом OFDM є можливість протидіяти розкиду затримок, що є переважаючим феноменом в наземній системі зв'язку. Розкид затримок безпровідного каналу - це часовий інтервал або тривалість імпульсної характеристики безпровідного каналу. Цей розкид затримок також є різницею між першим і останнім екземпляром сигналу (або багатопроменевим поширенням) в приймальному пристрої для сигналу, що передається за допомогою безпровідного каналу передавальним пристроєм. Ці екземпляри сигналу можуть проходити через прямий промінь/промені прямої видимості і непрямі/перевідбиті промені, сформовані перешкодами в навколишньому середовищі. Сигнал, що приймається, в приймальному пристрої є суперпозицією всіх екземплярів сигналу, які приходять. Розкид затримок викликає міжсимвольні перешкоди (ISI), які є феноменом, при якому кожний символ в сигналі, що приймається, діє як спотворення для одного або більшої кількості наступних символів в сигналі, що приймається. Це спотворення ISI знижує продуктивність, впливаючи на здатність приймального пристрою коректно виявляти символи, які приймаються. Розкиду затримок можна успішно протидіяти за допомогою OFDM за рахунок повторення кожного перетвореного символу для формування символу OFDM. Частина, що повторюється, називається циклічним префіксом або захисним інтервалом. Довжина циклічного префікса дорівнює числу вибірок, які повторюються для кожного перетвореного символу. Довжина циклічного префікса визначає величину розкиду затримок, якому можна протидіяти за допомогою OFDM. Велика довжина циклічного префікса дозволяє протидіяти більшому розкиду затримок. Довжина циклічного префікса звичайно встановлюється на основі максимального очікуваного розкиду затримок для даного процента (наприклад, 95 %) приймальних пристроїв в системі. Оскільки циклічний префікс представляє додаткові непродуктивні витрати для кожного символу OFDM, бажано мати по можливості більш коротку довжину циклічного префікса для зниження непродуктивних витрат. Отже, в даній галузі техніки існує потреба в способах зниження негативного впливу розкиду затримок при зменшенні непродуктивних витрат. Заявлені способи передачі даних, що дозволяють знизити негативний вплив розкиду затримок. Ці способи можуть використовуватися для різних типів передачі (наприклад, передача для конкретного користувача, групова і широкомовна передача) і для різних послуг (наприклад, послуга поліпшеної широкомовної і групової передачі (E-MBMS)). Згідно з варіантом здійснення винаходу, описаний пристрій, який включає в себе контролер і модулятор. Контролер визначає передбачувані зони покриття для множини передач, які повинні здійснюватися в декількох часових інтервалах, і вибирає довжину циклічного префікса для цих передач на основі передбачуваних зон покриття. Модулятор обробляє (наприклад, виконує OFDM-модуляцію) передачі на основі вибраної довжини циклічного префікса. Згідно з іншим варіантом здійснення, передбачений спосіб, в якому визначаються зони покриття для множини передач, здійснюваних у множині часових інтервалів. Довжини циклічного префікса для цих передач вибираються на основі передбачуваних зон покриття. Передачі обробляються на основі вибраних довжин циклічного префікса. Згідно з ще одним варіантом здійснення, описується пристрій, який включає в себе засіб визначення передбачуваних зон покриття для множини передач, які повинні здійснюватися у множині часових інтервалів, засіб вибору довжин циклічного префікса для цих передач на 1 UA 102074 C2 5 10 15 20 25 30 35 40 45 50 55 основі передбачуваних зон покриття і засіб обробки передачі на основі вибраних довжин циклічного префікса. Згідно з ще одним варіантом здійснення, передбачений спосіб, в якому довжина циклічного префікса вибирається з множини довжин циклічного префікса для передачі даних на основі максимального передбачуваного розкиду затримок для передачі даних. Передача даних обробляється на основі вибраної довжини циклічного префікса. Згідно з іншим варіантом здійснення винаходу, описаний пристрій, який включає в себе контролер і демодулятор. Контролер приймає сигналізацію для щонайменше однієї довжини циклічного префікса для щонайменше однієї передачі, відправленої щонайменше в одному часовому інтервалі. Щонайменше одна довжина циклічного префікса вибирається на основі передбачуваної зони покриття для щонайменше однієї передачі. Демодулятор приймає і обробляє (наприклад, виконує OFDM - демодуляцію) щонайменше одну передачу на основі щонайменше однієї довжини циклічного префікса. Згідно з ще одним варіантом здійснення, передбачений спосіб, в якому сигнали, що передаються, приймаються щонайменше для однієї довжини циклічного префікса, вибираної для щонайменше однієї передачі, здійснюваної щонайменше в одному часовому інтервалі. Щонайменше одна передача обробляється на основі щонайменше однієї довжини циклічного префікса. Згідно з ще одним варіантом здійснення, описується пристрій, який включає в себе засіб прийому сигналів, що передаються, щонайменше для однієї довжини циклічного префікса, вибираної для щонайменше однієї передачі, здійснюваної щонайменше в одному часовому інтервалі, і засіб обробки щонайменше однієї передачі на основі щонайменше однієї довжини циклічного префікса. Далі детально описані різні аспекти і варіанти здійснення винаходу. Короткий опис креслень Фіг. 1 ілюструє систему з базовими станціями, що мають різні розміри зон покриття. Фіг. 2 ілюструє систему з локальною і глобальною передачею. Фіг. 3 ілюструє OFDM-модулятор. Фіг. 4А, 4В і 4С ілюструють пілот-сигнал з 1-кратним, 2-кратним і 3-кратним зміщенням, відповідно. Фіг. 5 ілюструє імпульсну характеристику каналу з надмірним розкидом затримок. Фіг. 6А-6Е ілюструє відношення сигнал/шуми (SNR) для 95 % покриття при різних значеннях потужності ефективного ізотропного випромінювача (EIRP), радіуса стільникового осередку, довжини циклічного префікса і пілот-сигналів зі зміщенням. Фіг. 7 ілюструє 3-рівневу структуру суперкадру для передачі даних, пілот-сигналів і службових сигналів. Фіг. 8 ілюструє структуру кадру для системи TDD з W-CDMA і OFDM. Фіг. 9 і 10 ілюструє два процеси для передачі даних таким чином, щоб пом'якшити негативний вплив розкиду затримок. Фіг. 11 ілюструє блок-схему базової станції і термінала. Докладний опис винаходу Слово "зразковий" використовується в даному документі в значенні "служить як приклад, окремий випадок або ілюстрація". Будь-який варіант здійснення, описаний в даному документі як "зразковий", необов'язково повинен бути витлумачений як переважний або вигідний в порівнянні з іншими варіантами здійснення. Описані в даному документі способи передачі можуть бути використані для різних систем зв'язку, які використовують різні методи радіозв'язку, такі як OFDM, FDMA з перемежовуванням (IFDMA) (який також називається розподіленим FDMA), локалізований FDMA (LFDMA) (який також називається вузькосмуговим FDMA або класичним FDMA), W-CDMA, cdma2000 і інші методи модуляції. OFDM, IFDMA і LFDMA - це методи радіозв'язку з множиною несучих, які ефективно розділяють загальну ширину смуги системи на множину (S) ортогональних частотних піддіапазонів. OFDM передає символи модуляції в частотній області по всіх або піднабору з S піддіапазонів. IFDMA передає символи модуляції у часовій області по піддіапазонах, які рівномірно розподілені по S піддіапазонах. LFDMA передає символи модуляції у часовій області і, в типовому випадку, по сусідніх піддіапазонах. Застосування OFDM для одноадресної, групової і широкомовної передачі також може розглядатися як різні методи радіозв'язку. Наведений вище перелік методів радіозв'язку не є повним, і способи передачі також можуть бути використані для інших методів радіозв'язку, не згаданих вище. Для простоти способи передачі описуються нижче для OFDM. 2 UA 102074 C2 5 10 15 20 25 30 35 40 45 50 55 Фіг. 1 ілюструє систему 100 безпровідної станції з декількома базовими станціями 110 і декількома терміналами 120. Для простоти на фіг. 1 показано тільки чотири базових станції 110a-110d. Базова станція це, загалом, стаціонарна станція, яка обмінюється даними з терміналами, і вона також може бути визначена як точка доступу, вузол В, базова приймальнопередавальна підсистема (BTS) або яким-небудь іншим терміном. Кожна базова станція 110 надає покриття зв'язку для конкретної географічної зони 102. Термін "стільниковий осередок" може означати базову станцію і/або її зону покриття в залежності від контексту, в якому використовується цей термін. Для простоти зона покриття кожної базової станції представлена ідеальним колом на фіг. 1. У фактично розгорненій системі зона покриття кожної базової станції в типовому випадку має форму, яка відрізняється від ідеального кола і залежить від різних чинників, таких як територія, перешкоди і т. п. Зони покриття базових станцій можуть мати один або різні розміри. У прикладі, показаному на фіг. 1, базова станція 110а має найбільшу зону покриття 102а, базова станція 110b має наступну по величині зону покриття 102b, базова станція 110с має наступну по величині зону покриття 102с, а базова станція 110d має найменшу зону покриття 102d з чотирьох базових станцій, показаних на фіг. 1. Термінал може бути стаціонарним або мобільним і також може називатися мобільною станцією, безпровідним пристроєм, абонентським обладнанням, абонентським терміналом, абонентським пристроєм або яким-небудь іншим терміном. Термінал може здійснювати зв'язок з однією або множиною базових станцій по низхідній і/або висхідній лінії зв'язку або не здійснювати зв'язку в будь-який даний момент. Низхідна лінія зв'язку (або лінія прямого зв'язку) стосується лінії зв'язку від базових станцій до терміналів, а висхідна лінія зв'язку (або лінія зворотного зв'язку) стосується лінії зв'язку від терміналів до базових станцій. Термінали можуть бути розподілені по зонах покриття базових станцій. Кожний термінал виявляє різний безпровідний канал, який залежить від розміщення цього термінала відносно базових станцій в системі. Базові станції можуть здійснювати широкомовну передачу різного вмісту (наприклад, аудіо, відео, телетексту, даних, аудіо-/відеокліпів і т. п.) в різних типах передач. Передача широкого обхвату - це широкомовна передача за допомогою всіх або більшості базових станцій в системі. Різні передачі широкого обхвату можуть транслюватися різними групами базових станцій в системі. Локальна передача - це широкомовна передача за допомогою піднабору базових станцій для даної передачі широкого обхвату. Різні локальні передачі можуть транслюватися різними піднаборами базових станцій для передачі широкого обхвату. Локальні передачі і передачі широкого обхвату можна розглядати як передачі з різними рівнями покриття. Зона покриття для кожної передачі визначається всіма базовими станціями, що транслюють цю передачу. Фіг. 2 ілюструє систему 200 безпровідного зв'язку з локальною передачею і передачею широкого обхвату. Система 200 включає в себе зону 210 широкого обхвату, яка включає в себе локальну зону 220. Зона широкого обхвату і локальна зона - це просто різні зони покриття в системі. Загалом, система може включати будь-яке число зон широкого обхвату і будь-яке число локальних зон. Передача широкого обхвату для даної зони широкого обхвату транслюється всіма базовими станціями в цій зоні широкого обхвату. Локальна передача для даної локальної зони транслюється всіма базовими станціями в цій локальній зоні. У прикладі, показаному на фіг. 2, локальна зона 220 має три базові станції. Термінал 120х в локальній зоні 220 може приймати однакові локальні передачі від всіх трьох базових станцій в цій локальній зоні, як показано на фіг. 2. Сигнал, що приймається, в терміналі 120х є суперпозицією всіх екземплярів сигналу, що приймаються від цих трьох базових станцій за допомогою прямих променів (як показано на фіг. 2) і непрямих променів (не показано на фіг. 2). Безпровідний канал термінала 120х для локальних передач складається зі всіх прямих і непрямих променів для всіх трьох базових станцій в локальній зоні 220. Зона 210 широкого обхвату має набагато більше базових станцій, ніж локальна зона 220. У прикладі, показаному на фіг. 2, термінал 120у в зоні 210 широкого обхвату приймає однакові передачі широкого обхвату від 19 базових станцій в дворівневій решітчастій зоні 212, яка показана затіненням в межах пунктирного контуру. Ці 19 базових станцій включають в себе центральну базову станцію, шість базових станцій в першому рівні або кільці навколо центральної базової станції і 12 базових станцій у другому рівні навколо центральної базової станції. Сигнал, що приймається, в терміналі 120у є суперпозицією всіх екземплярів сигналів, що приймаються за допомогою прямих і непрямих променів від всіх цих 19 базових станцій. Безпровідний канал термінала 120у для передач широкого обхвату складається з всіх прямих і непрямих променів для 19 базових станцій в зоні 212. 3 UA 102074 C2 5 10 15 20 25 30 35 40 45 50 55 Фіг. 1 і 2 ілюструють дві зразкові системи, в яких різні термінали можуть виявляти різні безпровідні канали завдяки різним місцеположенням в системі, різним розмірам зон покриття базових станцій і різним типам передачі. Ці різні типи передачі можуть включати в себе одноадресні передачі, що відправляються конкретним терміналам, групові передачі, що відправляються групам терміналів, і широкомовні передачі, що відправляються всім терміналам в зоні покриття широкомовної передачі. Термінали будуть спостерігати різні розкиди затримок. Максимальний очікуваний розкид затримок для даної передачі, загалом, пропорційний розміру зони покриття для цієї передачі. Максимальний очікуваний розкид затримок для широкомовної передачі - це верхній граничний розкид затримок даної процентної частки терміналів, що приймають цю передачу. Наприклад, 95 % всіх терміналів, що приймають широкомовну передачу, можуть мати розкиди затримок, які менші або дорівнюють максимальному передбачуваному розкиду затримок. Максимальний очікуваний розкид затримок, в загальному випадку, менший для локальної передачі і більший для передачі широкого обхвату, як показано на фіг. 2. Максимальний очікуваний розкид затримок для конкретної для користувача передачі - це верхній граничний розкид затримок, що виявляється терміналом, який приймає цю передачу для даної процентної частки реалізацій. Наприклад, термінал, що приймає передачу, може виявляти розкид затримок, який менший або дорівнює максимальному передбачуваному розкиду затримок, протягом 95 % часу. У передачі для конкретного користувача максимальний очікуваний розкид затримок в типовому випадку (але необов'язково) менше для базової станції з малою зоною покриття і більше для базової станції з великою зоною покриття. Довжина циклічного префікса, яка конфігурується, може бути використана для протидії різним максимальним передбачуваним розкидам затримок для різних типів передачі (наприклад, локальних передач і передач широкого обхвату) і для різних розмірів зон покриття базових станцій. Коротка довжина циклічного префікса може бути використана для передачі з меншим максимальним передбачуваним розкидом затримок для зменшення непродуктивних витрат, пов'язаних з передачею циклічного префікса. Ця передача може бути локальною передачею або конкретною для користувача передачею в меншій зоні покриття. На відміну від цього, велика довжина циклічного префікса може бути використана для передачі з великим максимальним передбачуваним розкидом затримок, щоб забезпечити можливість терміналу ефективно долати міжсимвольні перешкоди. Ця передача може бути передачею широкого обхвату або передачею для конкретного користувача в більшій зоні покриття. Фіг. 3 ілюструє блок-схему OFDM-модулятора 300 для передавального пристрою в OFDMсистемі. Дані для передачі звичайно спочатку кодуються на основі схеми кодування для генерації кодових бітів. Потім кодові біти перетворюються в символи модуляції на основі схеми модуляції (наприклад, М-PSK або M-QAM). Кожний символ модуляції - це комплексне значення в сигнальній сукупності для схеми модуляції. У кожному періоді символу OFDM один символ модуляції може передаватися в кожному піддіапазоні, що використовується для передачі, а нульовий символ (який має значення сигналу нуль) передається в кожному невикористовуваному піддіапазоні. Символи модуляції і нульові символи згадуються як символи передачі. Блок ЗШПФ 310 приймає S символів передачі для загального числа S піддіапазонів в кожному періоді символу OFDM, перетворює S символів передачі у часову область за допомогою S-точкового ЗШПФ і забезпечує перетворений символ, який містить S вибірок часової області. Кожна вибірка є комплексним значенням, яке повинне передаватися в одному періоді вибірки. Перетворювач 312 з паралельної форми в послідовну (P/S) перетворює в послідовну форму S вибірок для кожного перетвореного символу. Потім генератор 314 циклічних префіксів повторює частину (або С вибірок) кожного перетвореного символу для формування OFDM-символу, який містить S+C вибірок. Циклічний префікс використовується для протидії міжсимвольним перешкодам, зумовленим розкидом затримок. Період символу OFDM (який також називається просто періодом символу) - це тривалість одного символу OFDM, і він дорівнює S+C періодам вибірок. Базова станція може передавати пілот-сигнал за допомогою мультиплексування з частотним розділенням каналів (FDM), мультиплексування з часовим розділенням каналів (TDM), мультиплексування з кодовим розділенням каналів (CDM) і/або якої-небудь іншої схеми модуляції. Наприклад, базова станція періодично може передавати пілот-сигнал TDM, який може бути використаний для синхронізації за часом, оцінки по частоті і т. д. Також базова станція може передавати пілот-сигнал FDM, який може використовуватися для оцінки каналу. Пілот-сигнал FDM - це пілот-сигнал, що передається в Р піддіапазонах, які розподілені по загальному числу S піддіапазонів, де S>P>1. 4 UA 102074 C2 5 10 15 20 25 30 35 40 45 50 55 60 Фіг. 4А ілюструє зразкову схему 410 передачі пілот-сигналів FDM з 1-кратним зміщенням. Для схеми 410 з 1-кратним зміщенням пілот-сигнал FDM передається в одному наборі з Р піддіапазонів. Р піддіапазонів в наборі однорідно розподілені по загальному числу S піддіапазонів, так що послідовні піддіапазони в наборі відділені проміжком в D=S/P піддіапазонів. Таким чином, набір містить піддіапазони s1 D+s1 2D+s1 і т. д., де початковий індекс піддіапазону s1 може бути будь-яким цілим значенням між 1 і D. Пілот-сигнал FDM передається по одному набору з Р піддіапазонів в кожному періоді символу OFDM, в якому передається пілот-сигнал FDM. Фіг. 4В ілюструє зразкову схему 420 передачі пілот-сигналів FDM з 2-кратним зміщенням. Для схеми 420 з 2-кратним зміщенням пілот-сигнал FDM передається по двох наборах з Р піддіапазонів. Р піддіапазонів в кожному наборі однорідно розподілені по загальному числу S піддіапазонів. Р піддіапазонів в першому наборі також зміщені від Р піддіапазонів у другому наборі на D/2 піддіапазонів. Перший набір містить піддіапазони s2, D+s2, 2D+s2 і т. д., а другий піддіапазон містить піддіапазони s'2, D+s'2, 2D+s'2 i т. п. Початковий індекс піддіапазону s2 може бути будь-яким цілим значенням між 1 і D/2, а індекс s'2 може бути s'2=s2+D/2. Пілот-сигнал FDM може передаватися по двох наборах піддіапазонів в періодах символів, що чергуються, наприклад, по першому набору піддіапазонів в непарних періодах символів і по другому набору піддіапазонів в парних періодах символів. Фіг. 4С ілюструє зразкову схему 430 передачі пілот-сигналів FDM з 3-кратним зміщенням. Для схеми 430 з 3-кратним зміщенням пілот-сигнал FDM передається по трьох наборах з Р піддіапазонів. Р піддіапазонів в кожному наборі однорідно розподілені по загальному числу S піддіапазонів. Р піддіапазонів в кожному наборі також зміщені від Р піддіапазонів в кожному з двох інших наборів приблизно на D/3 піддіапазонів. Перший набір містить піддіапазони s 3, D+s3, 2D+s3 і т. д., другий набір містить піддіапазони s'3, D+s'3, 2D+s'3 і т. д., а третій набір містить піддіапазони s"3, D+s"3, 2D+s"3 і т. д. Початковий індекс піддіапазону s3 може бути будь-яким цілим значенням між 1 і [D/3], індекс s'3 може бути s'3=s3+[D/3], а індекс s"3 може бути s"3=s3+2*[D/3], де [х] означає оператор взяття найбільшого цілого числа, що забезпечує ціле значення, яке дорівнює або більше х. Пілот-сигнал FDM може циклічно пройти через три набори піддіапазонів, наприклад, передаватися по першому набору піддіапазонів в періоді символу n, потім по другому набору піддіапазонів в періоді символу n+1, потім по третьому набору піддіапазонів в періоді символу n+2, а потім знов по першому набору піддіапазонів в періоді символу n+3 і т. д. Фіг. 4А-4С ілюструють три зразкових пілот-сигнали зі зміщенням. Пілот-сигнал зі зміщенням, що передається в декількох наборах піддіапазонів (наприклад, як показано на фіг. 4В або 4С), дає терміналу можливість (1) дискретизувати смугу пропускання системи на більше число піддіапазонів в частотній області і (2) діставати оцінку каналу більш високої якості. Загалом, пілот-сигнал FDM може передаватися по будь-якому числу наборів піддіапазонів, і кожний набір може містити будь-яке число піддіапазонів. Пілот-сигнал FDM також може передаватися з різними конфігураціями зміщення, які вказують, який діапазон потрібно використовувати для пілот-сигналу FDM в кожному періоді символу. Наприклад, пілот-сигнал FDM може передаватися в чотирьох наборах піддіапазонів для 4-кратного зміщення в D наборах піддіапазонів для повного зміщення і т. д. Фіг. 5 ілюструє імпульсну характеристику 500 безпровідного каналу з надмірним розкидом затримок, який є розкидом затримок, більшим довжини циклічного префікса. Імпульсна характеристика каналу складається з Q канальних відведення з індексами 1-Q, де Q>C, коли є надмірний розкид затримок. Перші С канальних відведення визначаються як магістральний канал, a Q-C канальних відведення, що залишилися - як надмірний канал. OFDM - символ, що приймається, в терміналі утворений суперпозицією OFDM -символу, що передається, помноженого на кожне з Q канальних відведень. Циклічний префікс довжини С дозволяє захоплювати всю енергію канальних відведень від 1 до С. Цей циклічний префікс не захоплює енергію канальних відведень від С+1 до Q. Надмірний розкид затримок викликає міжсимвольні перешкоди. Кожний OFDM - символ викликає перешкоди для подальшого OFDM - символу внаслідок надмірних канальних відведень від С+1 до Q. Кожний OFDM - символ також приймає перешкоди від попереднього OFDM - символу внаслідок надмірних канальних відведень. Міжсимвольні перешкоди можуть бути зменшені за рахунок збільшення довжини циклічного префікса, наприклад, до C=Q. Надмірний розкид затримок також погіршує продуктивність оцінки каналу. Якщо пілот-сигнал FDM переданий в Р піддіапазонах, то оцінка імпульсної характеристики каналу з Р канальних відведень може бути отримана на основі цього пілот-сигналу FDM. У типовому випадку Р вибирається рівним С. 5 UA 102074 C2 5 10 15 20 25 30 У цьому випадку надмірні канальні відведення від С+1 до Q не можуть оцінюватися внаслідок недостатнього числа ступенів свободи. Крім того, імпульсна характеристика безпровідного каналу дискретизується із зниженою частотою в частотній області за допомогою Р піддіапазонів пілот-сигналів. Ця дискретизація із зниженою частотою приводить до перешкоди накладення спектрів надмірного каналу у часовій області, так що відведення С+1 надмірного каналу проявляється на відведенні 1 магістрального каналу, відведення С+2 надмірного каналу проявляється на відведенні 2 магістрального каналу і т. д. Кожне відведення надмірного каналу з перешкодою накладення спектрів викликає помилку оцінки відповідного відведення магістрального каналу. Погіршення якості оцінки каналу внаслідок надмірного розкиду затримок може бути знижене за допомогою передачі пілот-сигналу FDM по більшому числу піддіапазонів з використанням зміщення. Довжина оцінки канальної імпульсної характеристики (R) залежить від загального числа піддіапазонів, що використовуються для пілот-сигналу FDM, наприклад, R=P для 1-кратного зміщення R=2P для 2-кратного зміщення і R=3P для 3-кратного зміщення. Пілот-сигнал зі зміщенням забезпечує можливість дискретизації Найквіста безпровідного каналу навіть при наявності надмірного розкиду затримок і, отже, дозволяє уникнути оцінки каналу з перешкодою накладання спектрів. Загалом, більше зміщення дозволяє приймальному пристрою отримувати оцінку канальної імпульсної характеристики більшої довжини, яка дозволяє зменшити ступінь погіршення оцінки каналу. Довжина циклічного префікса і зміщення пілот-сигналу може вибиратися на основі різних чинників, наприклад, параметрів структури системи (наприклад, смуги пропускання системи, загального числа піддіапазонів і т. д.), типів передачі, передбачуваних зон покриття для передач і т. д. Довжина циклічного префікса і зміщення пілот-сигналу також може вибиратися на основі різних метрик ефективності. Однією такою метрикою є кумулятивна функція розподілу (CDF) відношення "корисної" енергії, що приймається, до теплового шуму і перешкод, яке також називається відношенням "сигнал/перешкода і шум" (SNR). Корисна енергія, що приймається, є сумою (1) енергії каналу, яка попадає в межі циклічного префікса (СР), і (2) енергії каналу, яка може бути зібрана з використанням пілот-сигналу зі зміщенням. Перешкоди утворені енергією каналу за межами циклічного префікса, яка не може бути зібрана з використанням пілот-сигналу зі зміщенням. SNR для різних пілот-сигналів зі зміщенням може бути виражене таким чином: RxPowerInsideCP , (1) RxPowerOutsideCP RxPowerIns ideCP RxPowerCol lectedwith 2xStaggerin g , N0 RxPower RxPowerIns ideCP RxPowerCol lectedwith 2xStaggerin g RxPowerIns ideCP RxPowerCol lectedwith 3 xStaggerin g , N0 RxPower RxPowerIns ideCP RxPowerCol lectedwith 3 xStaggerin g RxPower , N0 SNR 1x SNR 2 x SNR 3 x SNR 4 x 35 40 45 50 де SNR1x, SNR2x і SNR3x - це SNR для 1-, 2- і 3-кратного зміщення, відповідно; SNRideal - це SNR найкращого сценарію, коли захоплюється вся енергія, що приймається; a N0 - це 13 потужність шуму, яка приблизно дорівнює N0-2,16*10- Вт. У наборі рівнянь (1) Rx Power - це загальна потужність в терміналі, яка приймається. Rx Power Inside CP - це сума потужності, що приймається від центральної базової станції, плюс значення потужності від інших базових станцій, для яких затримки на поширення до термінала менше циклічного префікса. Rx Power Outside CP - це сума значень потужності, що приймається від всіх базових станцій, для яких затримки на поширення до термінала більше циклічного префікса. Rx Power Collected with 2x (або 3х) Staggering" - це сума значень потужності від всіх базових станцій, зібрана за допомогою пілот-сигналу з 2- або 3-кратним зміщенням. Ця зібрана потужність основана на припущенні, що якщо затримка на поширення від даної базової станції до термінала менша довжини зміщення (яка є добутком коефіцієнта зміщення на довжину циклічного префікса), то вся енергія, що приймається, для цієї базової станції може бути зібрана. Наприклад, потужність, що приймається, зібрана при 2-кратному зміщенні, може бути виражена як: RxPowerCol lectedwith 2xStaggerin g RxPowerfro mBS(i) (1 BS ( i ) рівняння (2), 6 delay (i) CPL 2 , ) FFTsize UA 102074 C2 5 де delay(i) - це затримка на поширення від базової станції І, a CPL - це довжина циклічного префікса. Підсумовування в рівнянні (2) здійснюється для всіх базових станцій із затримками на поширення меншими або рівними довжині 2-кратного зміщення, або в два рази перевищуючими довжину циклічного префікса. У наборі рівнянь (1) SNR1x, SNR2x, SNR3x і SNRideal - це випадкові змінні, які залежать від місцеположення термінала в системі. Ці випадкові змінні можна оцінити за допомогою математичного моделювання для зразкової системи з 19-стільниковою 2-рівневою решітчастою структурою, наприклад, як показано затіненою областю 212 в глобальній зоні 210 на фіг. 2. Табл. 1 перелічує деякі параметри, що використовуються для математичного моделювання. 10 Таблиця 1 Параметр Частота дискретизації Період дискретизації Загальне число піддіапазонів Число захисних піддіапазонів Число використовуваних піддіапазонів Число піддіапазонів пілот-сигналів Довжина циклічного префікса Тривалість циклічного префікса Тривалість вікна Загальна тривалість символу OFDM 15 20 25 30 35 Символ fs Ts S G U P с Tcp Тw TOFDM Ts=1/fs U=K-G Tcp=C∙Ts TW =W∙TS TOFDM=(S+C+W)∙Ts Значення 5,4 МГц 185,19 нс 1024 136 888 128 108 вибірок 20 мкc 4,074 мкc 213,71 мкc Математичне моделювання виконувалося для значень потужності ефективного ізотропного випромінювача (EIRP) в 2 кВт і 10 кВт, що відповідає потужності передачі в 53 дБ мВт і 60 дБ мВт, відповідно, при посиленні передавальної антени, яке дорівнює 10 дБ. Моделювання також виконувалося для різних радіусів стільникового осередку. Моделювання виконувалося для довжин циклічного префікса в 108, 154, 194 і 237 вибірок, що відповідає 20 мкc, 29 мкc, 36 мкc і 44 мкc, відповідно, для зразкової системи, показаної в табл. 1. Для кожної різної комбінації EIRP, радіуса стільникового осередку і довжини циклічного префікса моделювання виконувалося при великому числі реалізацій в різних розміщеннях зони покриття центральної базової станції в 2-рівневій структурі. Затінення відрізняється для кожної реалізації і визначається на основі випадкової змінної затінення. SNR1x, SNR2x, SNR3x і SNRideal визначаються для кожної реалізації. Для простоти багатопроменеве поширення при моделюванні не враховується. Потужність, що приймається в терміналі від кожної базової станції, являє собою потужність, що приймається за допомогою прямого променя. Вона дорівнює потужності, що передається від цієї базової станції, за вирахуванням втрат на трасі поширення дБ. Загальна потужність, що приймається в терміналі, дорівнює сумі потужностей, що приймаються для всіх базових станцій в 2-рівневій структурі. CDF виходить для кожної з чотирьох випадкових змінних SNR1x, SNR2x, SNR3x і SNRideal на основі значень SNR, отриманих для всіх реалізацій цієї випадкової змінної. Метрика ефективності "SNR для покриття у 95 %" використовується для кількісної оцінки ефективності кожної випадкової змінної. Величина SNR для покриття в 95 %, дорівнює γ для даної випадкової змінної означає, що 95 % реалізацій цієї випадкової змінної досягають значення SNR рівного у або краще. Наприклад, параметр SNR для покриття 95 % для випадкової змінної SNRideal може бути виражений як: Pr SNR ideal SNR 95 % 0,95 , (3) ideal де 95 % SNR ideal , - це SNR для покриття 95 % для випадкової змінної SNRideal, а Рr (х) означає імовірність виникнення х. Наступне співвідношення можна встановити для чотирьох випадкових змінних: SNR 95 % SNR 95 % SNR 95 % SNR ideal . (4) 1x 2x 3x 40 Різниця в значеннях SNR для покриття 95 % чотирьох випадкових змінних вказує, (1) чи є даний циклічний префікс достатньо довгим і (2) чи отримані які-небудь поліпшення за рахунок зміщення пілот-сигналу. Фіг. 6А-6Е ілюструють результати математичного моделювання. Одне креслення передбачене для кожної окремої комбінації EIRP і радіуса стільникової комірки, яка 7 UA 102074 C2 моделювалася. Кожний рисунок включає в себе чотири стовпчасті діаграми для чотирьох різних довжин циклічного префікса. Кожна стовпчаста діаграма ілюструє SNR для покриття 95 % для кожної з трьох випадкових змінних SNR1x, SNR2x і SNR3x для конкретної комбінації EIRP, радіуса стільникової комірки і довжини циклічного префікса. У кожній стовпчастій діаграмі SNR для 5 покриття 95 % випадкової змінної SNR1x (тобто SNR 95 % ) - це значення SNR, відповідне верху 1x прямокутника з перехресною штриховкою, SNR для покриття 95 % випадкової змінної SNR2x (тобто SNR 95 % ) - це значення SNR, відповідне верху зачорненого прямокутника, а значення 2x SNR для покриття 95 % випадкової змінної SNR3x (тобто SNR 95 % ) - це значення SNR, 3x відповідне верху прямокутника з горизонтальною штриховкою. На 10 максимальне значення для вертикальної осі відповідає кожному кресленні 95 % SNR ideal який є SNR для покриття 95 %, якщо циклічний префікс має достатню довжину для захоплення енергії, що приймається. На кожній стовпчастій діаграмі зачорненого прямокутника немає, якщо SNR 95 % SNR 95 % , 2x 1x і горизонтально заштрихованого прямокутника немає, якщо SNR 95 % SNR 95 % . Висота зачорненого прямокутника вказує величину поліпшення, що 3x 2x 15 20 25 30 досягається при 2-кратному зміщенні в порівнянні з 1-кратним зміщенням. Висота горизонтально заштрихованого прямокутника вказує величину поліпшення, що досягається при 3-кратному зміщенні в порівнянні з 2-кратним зміщенням. Спільна висота зачорненого прямокутника і горизонтально заштрихованого прямокутника вказує величину поліпшення, що досягається при 3-кратному зміщенні в порівнянні з 1-кратним зміщенням. Відсутність зачорненого прямокутника вказує відсутність поліпшення при 2-кратному зміщенні. Відсутність горизонтально заштрихованого прямокутника вказує відсутність поліпшення при 3-кратному зміщенні. Для даного зміщення пілот-сигналу поліпшення в SNR з більшою довжиною циклічного префікса представлене за допомогою зміни висоти прямокутників для цього зміщення пілот-сигналу по чотирьох стовпчастих діаграмах на даному рисунку. Наприклад, поліпшення SNR при великих довжинах циклічного префікса для 1-кратного зміщення представлене змінами висоти прямокутників з перехресною штриховкою по чотирьох стовпчастих діаграмах. Фіг. 6А, 6В і 6С показують SNR для покриття 95 % при EIRP 2 кВт і радіусах стільникових осередків 2 км, 3 км і 5 км, відповідно. Стовпчасті діаграми на цих рисунках показують, що (1) велика довжина циклічного префікса підвищує ефективність для радіусів стільникових комірок 4 км і 5 км і (2) 2-кратне або 3-кратне зміщення каналів повинне бути використане для досягнення SNR 95 % . ideal 35 Фіг. 6D і 6Е показують SNR для покриття 95 % при EIRP в 10 кВт і радіуса стільникових осередків 3 км і 6 км, відповідно, стовпчасті діаграми на цих кресленнях вказують, що (1) циклічний префікс може бути збільшений приблизно з 108 вибірок (20 мкс) до 151 вибірки (29 мкс) при радіусі стільникової комірки приблизно 3 км, і (2) довжина циклічного префікса у 108 вибірок має певні втрати відносно 40 45 50 SNR 95 % навіть при 3-кратному зміщенні. ideal Результати моделювання, показані на фіг. 6А-6Е, наведені для конкретної структури системи, конкретної моделі поширення і конкретної структури приймального пристрою. Різні результати можуть бути отримані при різних структурах і різних моделях. Загалом, розкид затримок зростає по мірі збільшення радіуса стільникової комірки, і більша довжина циклічного префікса може використовуватися для більшого розкиду затримок, щоб поліпшувати SNR. Зміщення пілот-сигналу підвищує ефективність в багатьох випадках. Фіг. 7 ілюструє зразкову 4-рівневу структуру 700 суперкадру, який може використовуватися для передачі даних, пілот-сигналів і службових сигналів. Вісь часу передачі ділиться на суперкадри, причому кожний суперкадр має попередньо визначену тривалість, наприклад, одну секунду. Для показаного на фіг. 7 варіантf здійснення кожний суперкадр включає в себе (1) поле заголовка пілот-сигналів TDM і службової/керуючої інформації і (2) поле даних для даних трафіка і пілот-сигналів FDM. Пілот-сигнал TDM може використовуватися для синхронізації (наприклад, виявлення суперкадрів, оцінки частоти помилок і досягнення синхронізації). Пілотсигнали TDM і FDM можуть використовуватися для оцінки каналу. Службова інформація для кожного суперкадру дозволяє передавати різні параметри передач в цьому суперкадрі (наприклад, довжини циклічних префіксів, що використовуються при різних передачах, таких як локальні передачі і передачі широкого обхвату). Поле даних кожного суперкадру розділяється 8 UA 102074 C2 5 10 15 20 25 30 35 40 45 50 55 на K зовнішніх кадрів рівного розміру для спрощення передачі даних, при цьому K>1. Кожний зовнішній кадр розділяється на N кадрів, і кожний кадр додатково розділяється на Т часових інтервалів, де N>1 і Т>1. Суперкадр, зовнішній кадр і часовий інтервал також можуть означатися іншими термінами. Описані в даному документі способи передачі також можуть застосовуватися в системах, які використовують множину методів радіозв'язку. Наприклад, ці способи можуть застосовуватися в системі, яка використовує (1) метод радіозв'язку з розширеним спектром, такий як W-CDMA, cdma2000 або який-небудь інший варіант множинного доступу з кодовим розділенням каналів і прямим розширенням спектра (DS-CDMA) для мовних і пакетних даних (2) і метод радіозв'язку з множиною несучих, таких як OFDM для даних широкомовної передачі. Фіг. 8 ілюструє зразкову структуру 800 кадру для системи дуплекса з часовим розділенням каналів (TDD), яка підтримує W-CDMA і OFDM. Часова лінія передачі ділиться на кадри. Кожний кадр має тривалість 10 і додатково ділиться на 15 часових інтервалів, яким призначаються індекси від 1 до 15. Кожний часовий інтервал має тривалість 0,667 мс і включає в себе 2560 кодових елементів. Кожний кодовий елемент має тривалість 0,26 мкс при ширині смуги системи 3,84 МГц. У прикладі, показаному на фіг. 8, часовий інтервал 1 використовується для інтервалу WCDMA низхідної лінії зв'язку, часові інтервали 2-6 використовуються для інтервалів OFDM низхідної лінії зв'язку, часовий інтервал 7 використовується для інтервалу W-CDMA висхідної лінії зв'язку, а часові інтервали 8-15 використовуються для інтервалів OFDM низхідної лінії зв'язку. Для кожного інтервалу W-CDMA дані одного або більшої кількості фізичних каналів можуть розділятися по каналах з різними ортогональними (наприклад, OVSF) послідовностями, спектрально розширятися за допомогою кодів скремблювання, об'єднуватися у часовій області і передаватися у всьому часовому інтервалі. Для кожного інтервалу OFDM низхідної лінії зв'язку L OFDM - символів можуть генеруватися для даних, які повинні передаватися в цьому часовому інтервалі, при цьому L>1. Наприклад, L=3 OFDM - символів можуть передаватися в кожному інтервалі OFDM низхідної лінії зв'язку, і кожний OFDM - символ може генеруватися на основі параметрів структури, показаних в табл. 1, і вибраної довжини циклічного префікса. Для системи дуплекса з частотним розділенням каналів (FDD), яка підтримує W-CDMA і OFDM, низхідна і висхідна лінії зв'язку передаються одночасно по окремих смугах частот. Кожний часовий інтервал в низхідній лінії зв'язку може використовуватися для W-CDMA або OFDM. Структура 800 кадру на фіг. 8 може бути вбудована в структуру 700 суперкадру на фіг. 7. Наприклад, кожний супер кадр може включати в себе чотири зовнішніх кадри (K=4), кожний зовнішній кадр може включати в себе 32 кадри (N=32), а кожний кадр може включати в себе 15 часових інтервалів (Т=15). Якщо кожний кадр має тривалість 10 мс, то кожний зовнішній кадр має тривалість 320 мс, а кожний суперкадр має тривалість приблизно 1,28 секунди. Фіг. 7 і 8 ілюструють зразкові структури суперкадру і кадру. Описані способи можуть використовуватися для інших систем і структур суперкадру і кадру. Для кожного часового інтервалу, що використовується при широкомовній передачі, зона покриття передачі, здійснюваної в цьому часовому інтервалі, залежить від числа сусідніх базових станцій, які здійснюють ту ж передачу. Якщо множина сусідніх станцій виконує одну передачу, то передача може вважатися призначеною для одночастотної мережі (SFN), термінал може приймати передачу від множини базових станцій і зона покриття для передачі буде великою. На відміну від цього, якщо одна або декілька базових станцій здійснюють дану передачу, то зона покриття передачі буде невеликою. Довжина циклічного префікса, яка конфігурується, може вибиратися декількома способами. У варіанті здійснення довжини циклічного префікса для різних передач вибираються на основі очікуваних зон покриття цих передач. Очікувана зона покриття передачі - це зона, в якій термінал може приймати дану передачу при певній мінімальній якості сигналу або вище. Очікувана зона покриття і максимальний очікуваний розкид затримок пов'язані так, що велика очікувана зона покриття відповідає більшому максимальному очікуваному розкиду затримок. Більша довжина циклічного префікса може вибиратися для (1) широкомовної передачі, здійснюваної множиною сусідніх базових станцій, або (2) передачі, призначеної для конкретного користувача базовою станцією, що передається з великою зоною покриття. Довжини циклічного префікса можуть вибиратися на основі доступної інформації про розгортання базових станцій в системі і інформації про диспетчеризацію здійснюваних передач. У іншому варіанті здійснення довжина циклічного префікса може вибиратися для кожної окремої передачі на основі очікуваної зони покриття цієї передачі. У всіх варіантах здійснення вибрані довжини циклічного 9 UA 102074 C2 5 10 15 20 25 30 35 40 45 50 55 60 префікса можуть передаватися терміналам за допомогою службових сигналів або якого-небудь іншого засобу. Довжина циклічного префікса, яка конфігурується, може бути статичною, напівстатичною або динамічною. Довжина циклічного префікса для локальних передач і передач широкого обхвату може бути статичною або напівстатичною, наприклад, якщо ці передачі здійснюються в стаціонарні або відносно статичні часові інтервали. Довжина циклічного префікса також може вибиратися динамічно на основі змін в локальній передачі широкого обхвату. Наприклад, в кожному суперкадрі довжина циклічного префікса може вибиратися для кожного часового інтервалу суперкадру на основі зони покриття передачі, здійснюваної в цьому часовому інтервалі. Більша довжина циклічного префікса може вибиратися для кожного часового інтервалу з передачею, що має більшу зону покриття. Менша довжина циклічного префікса може вибиратися для кожного часового інтервалу з передачею, що має меншу зону покриття. У системі може використовуватися стаціонарний або пілот-сигнал, що конфігурується зі зміщенням. Стаціонарний пілот-сигнал зі зміщенням може вибиратися на основі структури системи і передбачуваних робочих характеристик. Пілот-сигнал, що конфігурується, зі зміщенням може вибиратися з декількох пілот-сигналів зі зміщенням (наприклад, 1-, 2-, 3кратного і т. д.) на основі передбачуваних зон покриття або максимальних очікуваних розкидів затримок для здійснюваних передач. Наприклад, менше зміщення пілот-сигналу може використовуватися для локальної передачі з меншою зоною покриття, і більше зміщення пілотсигналу може використовуватися для передачі широкого обхвату з більшою зоною покриття. Фіг. 9 ілюструє процес 900 передачі даних таким чином, щоб знизити негативний вплив розкиду затримок. Спочатку оцінюється максимальний очікуваний розкид затримок для передачі даних на основі типу передачі даних, розміру зони покриття передачі даних і/або інших чинників (етап 912). Передача даних може бути широкомовною передачею, передачею для конкретного користувача або якою-небудь іншою передачею. Тип передачі може бути локальним, широкого обхвату і т. д. Довжина циклічного префікса вибирається з декількох можливих довжин циклічного префікса на основі максимального очікуваного розкиду затримок для передачі даних (етап 914). Наприклад, менша довжина циклічного префікса може вибиратися, якщо передача даних є локальною передачею, і більша довжина циклічного префікса може вибиратися, якщо передача даних є передачею широкого обхвату. Менша довжина циклічного префікса також може вибиратися, якщо передача даних має меншу зону покриття, і більша довжина циклічного префікса може вибиратися, якщо передача даних має більшу зону покриття. Вибрана довжина циклічного префікса може передаватися терміналам, що приймають передачу даних (етап 916). Передача даних обробляється на основі вибраної довжини циклічного префікса (етап 918). Кожний OFDM-символ, сформований для передачі даних, включає в себе циклічний префікс вибраної довжини. Фіг. 10 ілюструє процес 1000 передачі даних таким чином, щоб знизити негативний шкідливий вплив розкиду затримок. Процес 1000 може використовуватися, наприклад, зі структурами суперкадру і кадру, показаними на фіг. 7 і 8. Спочатку визначаються очікувані зони покриття для множини передач, які повинні здійснюватися в декількох часових інтервалах суперкадру (етап 1012). Довжина циклічного префікса для цих передач вибирається на основі очікуваних зон покриття (етап 1014). Довжина циклічного префікса для кожної передачі може вибиратися з набору дозволених довжин циклічного префікса на основі очікуваної зони покриття цієї передачі зміщення пілот-сигналу, що використовується для передачі, і т. д. Наприклад, менша довжина циклічного префікса може вибиратися для кожної локальної передачі, і велика довжина префікса може вибиратися для кожної передачі широкого обхвату. Вибрані довжини циклічного префікса можуть передаватися терміналам, наприклад, в блоці службових сигналів суперкадру (етап 1016). Передачі обробляються на основі вибраної довжини циклічного префікса (етап 1018). OFDM-символи генеруються для кожної передачі на основі довжини циклічного префікса, вибраній для цієї передачі. Процес 1000 може виконуватися періодично, наприклад, в кожному суперкадрі. У цьому випадку виконується визначення того, чи був початий новий суперкадр (етап 1020). Якщо відповідь "Так", то процес повертається до етапу 1012, щоб вибрати довжини циклічного префікса для передач, які повинні передаватися в новому суперкадрі. Довжини циклічного префікса також можуть вибиратися у часових інтервалах, відмінних від кожного суперкадру. Фіг. 11 ілюструє блок-схему однієї базової станції 110 і одного термінала 120. У базовій станції 110 процесор 1110 пілот-сигналів передачі (ТХ) генерує пілот-сигнал TDM і пілот-сигнал FDM на основі вибраного зміщення пілот-сигналу. Процесор 1120 ТХ - даних обробляє 10 UA 102074 C2 5 10 15 20 25 30 35 40 45 50 55 60 (наприклад, кодує, перемежовує і виконує символьне перетворення) даних трафіка і генерує символи даних, які є символами модуляції даних трафіку. OFDM - модулятор 1122 виконує OFDM - модуляцію даних і символів пілот-сигналу (наприклад, як показано на фіг. 3) і генерує OFDM-символи, які мають вибрані довжини циклічного префікса. Передавальний пристрій (TMTR) 1126 перетворює (наприклад, перетворює в аналогову форму, фільтрує, посилює і перетворює з підвищенням частоти) OFDM-символи і генерує модульований сигнал, який передається антеною 1128. У терміналі 120 антена 1152 приймає модульовані сигнали, що передаються базовою станцією 110 і іншими базовими станціями в системі. Приймальний пристрій (RCVR) 1154 перетворює, оцифровує і обробляє сигнал, що приймається, з антени 1152 і забезпечує потік вхідних вибірок. OFDM-демодулятор 1160 виконує OFDM-демодуляцію вхідних вибірок (наприклад, комплементарну до OFDM-модуляції, показаної на фіг. 3), і видає прийняті символи пілот-сигналу в блок 1162 оцінки каналу і символи даних в детектор 1164. Блок 1162 оцінки каналу дістає оцінку канальної імпульсної характеристики і/або оцінку канальної частотної характеристики на основі прийнятих символів пілот-сигналу. Детектор 1164 виконує виявлення (наприклад, вирівнювання) символів даних, що приймаються за допомогою оцінки каналу з блока 1162 оцінки каналу і видає оцінки символів даних, які є оцінками символів даних, які передаються. Процесор 1170 даних прийому (RX) обробляє (наприклад, виконує зворотне символьне перетворення, зворотне перемежовування і декодування) оцінки символів даних і видає декодовані дані. Загалом, обробка в терміналі 120 є комплементарною по відношенню до обробки в базовій станції 110. Контролери 1130 і 1180 керують роботою базової станції 110 і термінала 120, відповідно. Запам'ятовуючі пристрої 1132 і 1182 зберігають програмний код і дані, що використовується контролерами 1130 і 1180, відповідно. Контролер 1130 і/або блок 1134 диспетчеризації виконує диспетчеризацію передачі по низхідній лінії зв'язку і виділяє системні ресурси (наприклад, часові інтервали) призначеним передачам. Описані в даному документі способи передачі можуть використовуватися для передачі по низхідній лінії зв'язку, як описано вище. Ці способи також можуть використовуватися для передачі по висхідній лінії зв'язку. Описані в даному документі способи передачі можуть бути реалізовані різними засобами. Наприклад, ціспособи можуть бути реалізовані в апаратних засобах, програмному забезпеченні або їх поєднанні. При реалізації в апаратних засобах процесори, що використовуються для вибору параметрів (наприклад, довжини циклічного префікса і/або зміщення пілот-сигналів), що конфігуруються, і процесори, які використовуються для обробки даних, можуть бути такі, що реалізовують в одній або більше спеціалізованих інтегральних схемах (ASIC), процесорах цифрових сигналів (DSP), що передаються, пристроях цифрової обробки сигналів (DSPD), програмованих логічних пристроях (PLD), програмованих користувачем матричних БІС (FPGA), процесорах, контролерах, мікроконтролерах, мікропроцесорах, електронних пристроях, інших електронних блоках, призначених для виконання описаних функцій, або їх поєднанні. Процесори, що використовуються для прийому передачі, також можуть бути реалізовані в одній або більше ASIC, DSP, процесорах, електронних пристроях і т. д. При реалізації в програмному забезпеченні способи можуть бути реалізовані за допомогою модулів (наприклад, процедур, функцій і т. п.), які виконують описані в даному документі функції. Програмні коди можуть бути збережені в запам'ятовуючому пристрої (наприклад, в запам'ятовуючому пристрої 1132 або 1182 на фіг. 11) і виконуватися процесором (наприклад, контролером 1130 і 1180). Запам'ятовуючий пристрій може бути реалізований в процесорі або зовнішнім чином по відношенню до процесора, причому у другому випадку він може бути пов'язаний з процесором за допомогою різних засобів, відомих в даній галузі техніки. Попередній опис розкритих варіантів здійснення наданий для того, щоб дати можливість будь-якому фахівцеві в даній галузі техніки створювати або використовувати даний винахід. Різні модифікації в цих варіантах здійснення повинні бути очевидними для фахівців в даній галузі техніки, а описані в даному документі загальні принципи можуть бути застосовані до інших варіантів здійснення без відступу від суті і об'єму винаходу. Таким чином, даний винахід не обмежується описаними варіантами здійснення, а повинен відповідати найширшому об'єму, узгодженому з розкритими принципами і новими ознаками. Перелік посилальних позицій 130 Системний контролер 310 S-точкове IFFT 312 Перетворювач з паралельної в послідовну форму (P/S) 314 Генератор циклічних префіксів 11 UA 102074 C2 5 10 15 20 25 912 Оцінка максимального очікуваного розкиду затримок для передачі даних (наприклад, на основі типу передачі, розміру зони покриття і інших чинників) 914 Вибір довжини циклічного префікса з множини можливих довжин циклічного префікса на основі максимального очікуваного розкиду затримок для передачі даних 916 Передача вибраної довжини циклічного префікса терміналам, що приймають передачу даних 918 Обробка передачі даних на основі вибраної довжини циклічного префікса 1012 Визначення очікуваних зон покриття для множини передач, які повинні передаватися в декількох часових інтервалах суперкадру 1014 Вибір довжини циклічного префікса для передач на основі очікуваних зон покриття 1016 Передача вибраної довжини циклічного префікса (наприклад, за допомогою службових сигналів) терміналам 1018 Обробка передач на основі вибраної довжини циклічного префікса 1020 Новий суперкадр? 1110 Процесор ТХ-пілот-сигналів 1120 Процесор ТХ-даних 1122, 1160 OFDM-модулятор 1126 Передавальний пристрій 1130, 1180 Контролер 1132, 1182 Запам'ятовуючий пристрій 1134 Диспетчер 1154 Приймальний пристрій 1160 OFDM-демодулятор 1162 Блок оцінки каналу 1164 Детектор 1170 Процесор Rx-даних ФОРМУЛА ВИНАХОДУ 30 35 40 45 50 55 1. Пристрій зв'язку, що містить контролер для визначення очікуваних зон покриття для множини передач, які повинні передаватися в множині часових інтервалів, і для вибору довжин циклічного префікса для множини передач на основі метрики робочої характеристики; і модулятор для обробки множини передач на основі вибраних довжин циклічного префікса. 2. Пристрій за п. 1, в якому контролер визначає метрику робочої характеристики й вибирає довжини циклічного префікса в кожному часовому інтервалі заздалегідь визначеної тривалості. 3. Пристрій за п. 1, в якому метрика робочої характеристики є відношенням сигналу до шуму й перешкоди. 4. Пристрій за п. 1, в якому контролер вибирає довжину циклічного префікса з множини довжин циклічного префікса для кожної з множини передач на основі метрики робочої характеристики для передачі. 5. Пристрій за п. 1, в якому контролер вибирає довжини циклічного префікса для множини передач додатково на основі пілот-сигналу, мультиплексованого із частотним розділенням (FDM), переданого з множиною передач. 6. Пристрій за п. 1, в якому контролер вибирає пілот-сигнал зі зсувом з множини пілот-сигналів зі зсувами, причому модулятор додатково обробляє вибраний пілот-сигнал зі зсувом. 7. Пристрій за п. 6, в якому пілот-сигнал зі зсувом циклічно змінюється по множині піддіапазонів. 8. Пристрій за п. 6, в якому пілот-сигнал зі зсувом вибирається на основі метрики. 9. Пристрій за п. 6, в якому пілот-сигнал зі зсувом вибирається на основі очікуваних зон покриття. 10. Пристрій за п. 7, в якому множини піддіапазонів рівномірно розподілені. 11. Пристрій зв'язку, що містить засіб для визначення очікуваних зон покриття для множини передач, які повинні передаватися в множині часових інтервалів, і для вибору довжин циклічного префікса для множини передач на основі метрики робочої характеристики; і засіб для обробки множини передач на основі вибраних довжин циклічного префікса. 12. Пристрій за п. 11, що додатково містить засіб для визначення метрики робочої характеристики й вибору довжин циклічного префікса в кожному часовому інтервалі заздалегідь визначеної тривалості. 12 UA 102074 C2 5 10 15 20 25 30 35 40 45 50 55 13. Пристрій за п. 11, в якому метрика робочої характеристики є відношенням сигналу до шуму й перешкоди. 14. Пристрій за п. 11, в якому засіб для визначення вибирає довжину циклічного префікса з множини довжин циклічного префікса для кожної з множини передач на основі метрики робочої характеристики для передачі. 15. Пристрій за п. 11, в якому засіб для визначення вибирає довжини циклічного префікса для множини передач додатково на основі пілот-сигналу, мультиплексованого із частотним розділенням (FDM), переданого з множиною передач. 16. Пристрій за п. 11, в якому засіб для визначення вибирає пілот-сигнал зі зсувом з множини пілот-сигналів зі зсувами, причому модулятор додатково обробляє вибраний пілот-сигнал зі зсувом. 17. Пристрій за п. 16, в якому пілот-сигнал зі зсувом циклічно змінюється по множині піддіапазонів. 18. Пристрій за п. 16, в якому пілот-сигнал зі зсувом вибирається на основі метрики. 19. Пристрій за п. 16, в якому пілот-сигнал зі зсувом вибирається на основі очікуваних зон покриття. 20. Пристрій за п. 17, в якому множини піддіапазонів рівномірно розподілені. 21. Спосіб зв'язку, що містить визначення очікуваних зон покриття для множини передач, які повинні передаватися в множині часових інтервалів, і вибір довжин циклічного префікса для множини передач на основі метрики робочої характеристики; і обробку множини передач на основі вибраних довжин циклічного префікса. 22. Спосіб за п. 21, який додатково містить визначення метрики робочої характеристики й вибір довжин циклічного префікса в кожному часовому інтервалі заздалегідь визначеної тривалості. 23. Спосіб за п. 21, в якому метрика робочої характеристики є відношенням сигналу до шуму й перешкоди. 24. Спосіб за п. 21, який додатково містить вибір довжини циклічного префікса з множини довжин циклічного префікса для кожної з множини передач на основі метрики робочої характеристики для передачі. 25. Спосіб за п. 21, який додатково містить вибір довжин циклічного префікса для множини передач додатково на основі пілот-сигналу, мультиплексованого із частотним розділенням (FDM), переданого з множиною передач. 26. Спосіб за п. 21, який додатково містить вибір пілот-сигналу зі зсувом з множини пілотсигналів зі зсувами, причому модулятор додатково обробляє вибраний пілот-сигнал зі зсувом. 27. Спосіб за п. 26, в якому пілот-сигнал зі зсувом циклічно змінюється по множині піддіапазонів. 28. Спосіб за п. 26, в якому пілот-сигнал зі зсувом вибирається на основі метрики. 29. Спосіб за п. 26, в якому пілот-сигнал зі зсувом вибирається на основі очікуваних зон покриття. 30. Спосіб за п. 27, в якому множини піддіапазонів рівномірно розподілені. 31. Машиночитаний носій, який містить: код для спонукання комп'ютера визначати очікувані зони покриття для множини передач, які повинні передаватися в множині часових інтервалів, і для вибору довжин циклічного префікса для множини передач на основі метрики робочої характеристики; і код для спонукання комп'ютера обробляти множину передач на основі вибраних довжин циклічного префікса. 32. Машиночитаний носій за п. 31, який додатково містить код для визначення метрики робочої характеристики й вибору довжин циклічного префікса в кожному часовому інтервалі заздалегідь визначеної тривалості. 33. Машиночитаний носій за п. 31, в якому метрика робочої характеристики є відношенням сигналу до шуму й перешкоди. 34. Машиночитаний носій за п. 31, який додатково містить код для вибору довжини циклічного префікса з множини довжин циклічного префікса для кожної з множини передач на основі метрики робочої характеристики для передачі. 35. Машиночитаний носій за п. 31, який додатково містить код для вибору довжин циклічного префікса для множини передач додатково на основі пілот-сигналу, мультиплексованого із частотним розділенням (FDM), переданого з множиною передач. 36. Машиночитаний носій за п. 31, який додатково містить код для вибору пілот-сигналу зі зсувом з множини пілот-сигналів зі зсувами, причому модулятор додатково обробляє вибраний пілот-сигнал зі зсувом. 13 UA 102074 C2 5 37. Машиночитаний носій множині піддіапазонів. 38. Машиночитаний носій метрики. 39. Машиночитаний носій очікуваних зон покриття. 40. Машиночитаний носій за п. 36, причому пілот-сигнал зі зсувом циклічно змінюється по за п. 36, причому пілот-сигнал зі зсувом вибирається на основі за п. 36, причому пілот-сигнал зі зсувом вибирається на основі за п. 37, причому множини піддіапазонів рівномірно розподілені. 14 UA 102074 C2 15 UA 102074 C2 16 UA 102074 C2 17 UA 102074 C2 18 UA 102074 C2 19 UA 102074 C2 20 UA 102074 C2 21 UA 102074 C2 22 UA 102074 C2 Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 23
ДивитисяДодаткова інформація
Назва патенту англійськоюWireless communication system with configurable cyclic prefix length
Автори англійськоюAgrawal, Avneesh, Malladi Durga P, Stamoulis Anastasios, Mantravadi, Ashok, Murali Ramasvami
Назва патенту російськоюСистема беспроводной связи с конфигурированной длиной циклического префикса
Автори російськоюАгравал Авниш, Маллади Дурга П., Стамулис Анастасиос, Мантравади Ашок, Мурали Рамасвами
МПК / Мітки
МПК: H04L 5/02, H04L 27/26
Мітки: зв'язку, циклічного, префікса, безпровідного, довжиною, система, конфігурованою
Код посилання
<a href="https://ua.patents.su/25-102074-sistema-bezprovidnogo-zvyazku-z-konfigurovanoyu-dovzhinoyu-ciklichnogo-prefiksa.html" target="_blank" rel="follow" title="База патентів України">Система безпровідного зв’язку з конфігурованою довжиною циклічного префікса</a>
Система безпровідного зв’язку з конфігурованою довжиною циклічного префікса
Номер патенту: 91510
Опубліковано: 10.08.2010
Автори: Стамоуліс Анастасіос, Муралі Рамасвамі, Малладі Дурга П., Мантраваді Ашок, Агравал Авніш
МПК: H04L 27/26
Мітки: безпровідного, конфігурованою, зв'язку, циклічного, довжиною, система, префікса
Формула / Реферат:
1. Пристрій для передачі даних в системі безпровідного зв'язку, який міститьконтролер для визначення очікуваних зон покриття для множини передач, які повинні передаватися у множині часових інтервалів, і вибору довжини циклічного префікса для множини передач на основі очікуваних зон покриття, причому контролер визначає, чи є кожна з множини передач локальною передачею або передачею широкого охоплення; імодулятор для обробки...
Пристрій для адаптивної зміни тривалості циклічного префікса ofdm-символу при формуванні ofdm-сигналів
Номер патенту: 76901
Опубліковано: 25.01.2013
Автори: Конахович Георгій Филимонович, Одарченко Роман Сергійович, Голубничий Олексій Георгійович
МПК: H04J 11/00
Мітки: ofdm-символу, зміни, пристрій, циклічного, префікса, адаптивної, тривалості, ofdm-сигналів, формуванні
Формула / Реферат:
Пристрій для адаптивної зміни тривалості циклічного префікса OFDM-символу при формуванні OFDM-сигналів, який містить антенний пристрій, до виходу якого під'єднано вимірювач потужності прийнятих радіосигналів, до якого під'єднано накопичувач інформації про потужності прийнятих сигналів, до якого під'єднано розв'язувальний пристрій, після дії якого відбувається визначення оптимальної тривалості циклічного префікса OFDM-символу, який...
Спосіб адаптивної зміни тривалості циклічного префікса ofdm-символа при формуванні ofdm-сигналів
Номер патенту: 76902
Опубліковано: 25.01.2013
Автори: Голубничий Олексій Георгійович, Конахович Георгій Филимонович, Одарченко Роман Сергійович
МПК: H04J 11/00
Мітки: адаптивної, префікса, тривалості, формуванні, циклічного, спосіб, ofdm-символа, зміни, ofdm-сигналів
Формула / Реферат:
Спосіб адаптивної зміни тривалості циклічного префіксаOFDM-символа при формуванні OFDM-сигналів, який складається з послідовних операцій приймання радіосигналу, вимірювання рівня його потужності, обчислення різниці між максимальним та мінімальним рівнем радіосигналу, розрахунок часу багатопроменевості та його порівняння із можливою тривалістю циклічного префікса символа OFDM-сигналу та вибір оптимальної її тривалості, який відрізняється тим,...
Спосіб одночасної передачі сукупності типів даних та спосіб прийому передачі, мультиплексованої з розділенням часу у системі безпровідного звязку, а також передавальний та приймальний вузли такої системи
Номер патенту: 74396
Опубліковано: 15.12.2005
Автори: Вілленеґґер Серж, Ландбі Стайн А.
МПК: H04J 4/00, H04B 7/26, H04J 13/00, H04L 27/00
Мітки: приймальний, часу, передачі, розділенням, системі, такої, прийому, безпровідного, передавальний, вузлі, даних, зв'язку, також, сукупності, спосіб, мультиплексованої, одночасної, типів
Формула / Реферат:
1. Спосіб одночасної передачі сукупності типів даних у системі безпровідного зв'язку, який включає:- прийом і обробку першого типу даних згідно з першою схемою обробки сигналу для генерування першого корисного навантаження,- прийом і обробку другого типу даних згідно з другою схемою обробки сигналу для генерування другого корисного навантаження,- визначення у інтервалі передачі першої частини, призначеної для передачі...
Система безпровідного зв’язку (варіанти), спосіб та система для встановлення безпровідного зв’язку
Номер патенту: 83468
Опубліковано: 25.07.2008
Автори: Скотт Кліфтон Е., Хекман Скотт
МПК: H04B 1/38
Мітки: система, зв'язку, безпровідного, варіанти, встановлення, спосіб
Формула / Реферат:
1. Система безпровідного зв'язку, що містить: щонайменше один процесор передачі даних; щонайменше одну енергонезалежну пам'ять, постійно доступну для процесора передачі даних; і логіку, яка виконується процесором переважно для отримання забезпечуючої інформації із знімного модуля ідентифікації користувача, операційно з'єднаного з процесором, або отримання забезпечуючої інформації з енергонезалежної пам'яті.2. Система за п. 1, в якій...
Попередній патент: Поліпшення властивостей органічних сполук або характеристик, пов’язаних з органічними сполуками
Наступний патент: Композиція та способи застосування антитіл до склеростину
Випадковий патент: Спосіб профілактики ранніх проявів постоваріектомічного синдрому у хворих на рак ендометрія