Спосіб визначення кутів орієнтації лінії візування та пристрій для його здійснення
Номер патенту: 99021
Опубліковано: 10.07.2012
Автори: Черняк Сергій Іванович, Плита Олександр Андрійович, Жук Володимир Леонідович, Кадочніков Сергій Михайлович
Формула / Реферат
1. Спосіб визначення кутів орієнтації лінії візування нашоломною системою цілевказування і індикації, яка побудована на основі двох оптико-електронних скануючих блоків, електронного блока і нашоломного візирного пристрою з трьома випромінювачами I1, I2, І3, розміщеними на лицевому боці шолома у вигляді рівнобедреного, з основою I1I2, трикутника в площині I1I2І3, вектор нормалі до якої паралельний лінії візування, причому випромінювач I2 розміщений в лівій, а I1 - в правій частинах лицевого боку шолома, що включає формування кожним скануючим блоком вузького вертикального миттєвого поля зору і сканування ним внутрішньокабінного простору, формування трьох послідовностей імпульсів струму для живлення трьох випромінювачів нашоломного візирного пристрою, випромінювання трьох послідовностей імпульсів інфрачервоного кольору при проходженні миттєвого поля зору скануючих блоків енергетичних центрів випромінювання (ЕЦВ) кожного випромінювача і формування первинних складових кутів цілевказування, який відрізняється тим, що в нашоломний візирний пристрій додатково вводять два випромінювачі І4,I5 і розміщують випромінювач І4 на правій, a I5 - на лівій по відношенню до лінії візування боках шолома, причому випромінювач І4 лежить в площині І1І3І4, яка повернута навколо прямої з розміщеними на ній випромінювачами І1, І3 відносно площини І1І2І3 на кут ![]() і вектор нормалі до якої не паралельний лінії візування, а випромінювач І5 лежить в площині І2І3I5, яка повернута навколо прямої з розміщеними на ній випромінювачами І2, І3 відносно площини І1І2I3 на кут
і вектор нормалі до якої не паралельний лінії візування, а випромінювач І5 лежить в площині І2І3I5, яка повернута навколо прямої з розміщеними на ній випромінювачами І2, І3 відносно площини І1І2I3 на кут ![]() і вектор нормалі до якої не паралельний лінії візування, при цьому визначають пеленги на випромінювачі І1, І2, I3 і при відсутності пеленга на випромінювач І1 (при великих азимутальних кутах розвороту лінії візування вправо) відключають лінію живлення від випромінювача І1 і підключають її до випромінювача I5 та обчислюють пеленги на випромінювачі І2, І3, I5, а у випадку відсутності пеленга на випромінювач І2 (при великих азимутальних кутах розвороту лінії візування вліво) відключають лінію живлення від випромінювача І2 і підключають її до випромінювача І4 та обчислюють пеленги на випромінювачі І1, І3, I4, далі по обчислених пеленгах визначають координати ЕЦВ кожного із запеленгованих випромінювачів і при наявності пеленгів на випромінювачі І1, І3, I4 переносять зображення з перерахуванням координат ЕЦВ запеленгованого випромінювача I4 в площину І1І2I3 шляхом математичного, з використанням теорії обертання, повороту площини І1І3I4 навколо прямої з розміщеними на ній випромінювачами І1, І3 на кут мінус
і вектор нормалі до якої не паралельний лінії візування, при цьому визначають пеленги на випромінювачі І1, І2, I3 і при відсутності пеленга на випромінювач І1 (при великих азимутальних кутах розвороту лінії візування вправо) відключають лінію живлення від випромінювача І1 і підключають її до випромінювача I5 та обчислюють пеленги на випромінювачі І2, І3, I5, а у випадку відсутності пеленга на випромінювач І2 (при великих азимутальних кутах розвороту лінії візування вліво) відключають лінію живлення від випромінювача І2 і підключають її до випромінювача І4 та обчислюють пеленги на випромінювачі І1, І3, I4, далі по обчислених пеленгах визначають координати ЕЦВ кожного із запеленгованих випромінювачів і при наявності пеленгів на випромінювачі І1, І3, I4 переносять зображення з перерахуванням координат ЕЦВ запеленгованого випромінювача I4 в площину І1І2I3 шляхом математичного, з використанням теорії обертання, повороту площини І1І3I4 навколо прямої з розміщеними на ній випромінювачами І1, І3 на кут мінус ![]() , а у випадку наявності пеленгів на випромінювачі І2, І3, I5, переносять зображення з перерахуванням координат ЕЦВ запеленгованого випромінювача І5 в площину І1,І2,I3 шляхом математичного, з використанням теорії обертання, повороту площини І2І3I5 навколо прямої з розміщеними на ній випромінювачами І2, І3 на кут мінус
, а у випадку наявності пеленгів на випромінювачі І2, І3, I5, переносять зображення з перерахуванням координат ЕЦВ запеленгованого випромінювача І5 в площину І1,І2,I3 шляхом математичного, з використанням теорії обертання, повороту площини І2І3I5 навколо прямої з розміщеними на ній випромінювачами І2, І3 на кут мінус ![]() , після чого визначають, в залежності від групи запеленгованих випромінювачів, вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів І1, І2, I3, або вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів І1, I3 та точку з перерахованими в площину І1, І2, I3 координатами ЕЦВ запеленгованого випромінювача І4, чи вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів І2, І3 та точку з перерахованими в площину І1І2I3 координатами ЕЦВ запеленгованого випромінювача І5, причому в кожному із трьох випадків кожний із обчислених векторів нормалі паралельний лінії візування, а при відсутності пеленга на випромінювач І5 при підключеній до нього лінії живлення, відключають лінію живлення від випромінювача І5 і підключають її до випромінювача І1 та визначають вектор нормалі до площини I1 І2 І3, а у випадку відсутності пеленга на випромінювач І4 при підключеній до нього лінії живлення, відключають лінію живлення від випромінювача І4 і підключають її до випромінювача І2. та визначають вектор нормалі до площини І1І2I3 і, в залежності від обчисленого вектора нормалі, визначають кути орієнтації лінії візування.
, після чого визначають, в залежності від групи запеленгованих випромінювачів, вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів І1, І2, I3, або вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів І1, I3 та точку з перерахованими в площину І1, І2, I3 координатами ЕЦВ запеленгованого випромінювача І4, чи вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів І2, І3 та точку з перерахованими в площину І1І2I3 координатами ЕЦВ запеленгованого випромінювача І5, причому в кожному із трьох випадків кожний із обчислених векторів нормалі паралельний лінії візування, а при відсутності пеленга на випромінювач І5 при підключеній до нього лінії живлення, відключають лінію живлення від випромінювача І5 і підключають її до випромінювача І1 та визначають вектор нормалі до площини I1 І2 І3, а у випадку відсутності пеленга на випромінювач І4 при підключеній до нього лінії живлення, відключають лінію живлення від випромінювача І4 і підключають її до випромінювача І2. та визначають вектор нормалі до площини І1І2I3 і, в залежності від обчисленого вектора нормалі, визначають кути орієнтації лінії візування.
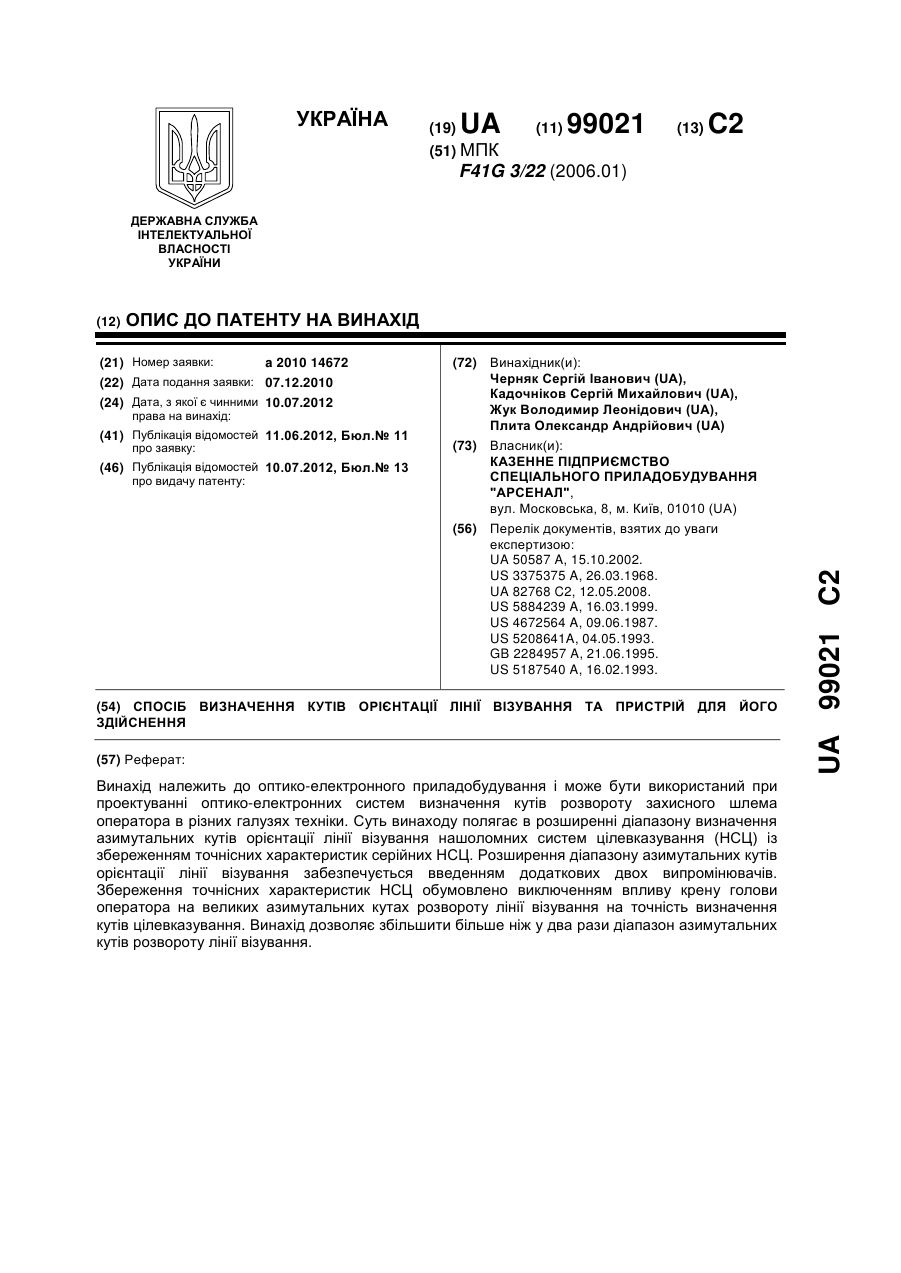
2. Пристрій визначення кутів орієнтації лінії візування, що містить нашоломний візирний пристрій з трьома випромінювачами, перший і другий оптико-електронні скануючі блоки, що задають базову систему координат, і електронний блок, при цьому виходи першого і другого скануючих блоків з'єднані відповідно з першим і другим входами електронного блока, перший вихід електронного блока з'єднаний з першим входом нашоломного візирного пристрою, який відрізняється тим, що в нього додатково введені блок обчислень і комутатор, а в нашоломний візирний пристрій додатково введені два випромінювачі, при цьому другий вихід електронного блока з'єднаний з другим входом комутатора, перший вхід комутатора з'єднаний з першим виходом блока обчислень, вихід комутатора з'єднаний з другим входом нашоломного візирного пристрою, два оптико-електронні скануючі блоки оптично сполучені з нашоломним візирним пристроєм, а другий вихід блока обчислень є виходом пристрою.
Текст
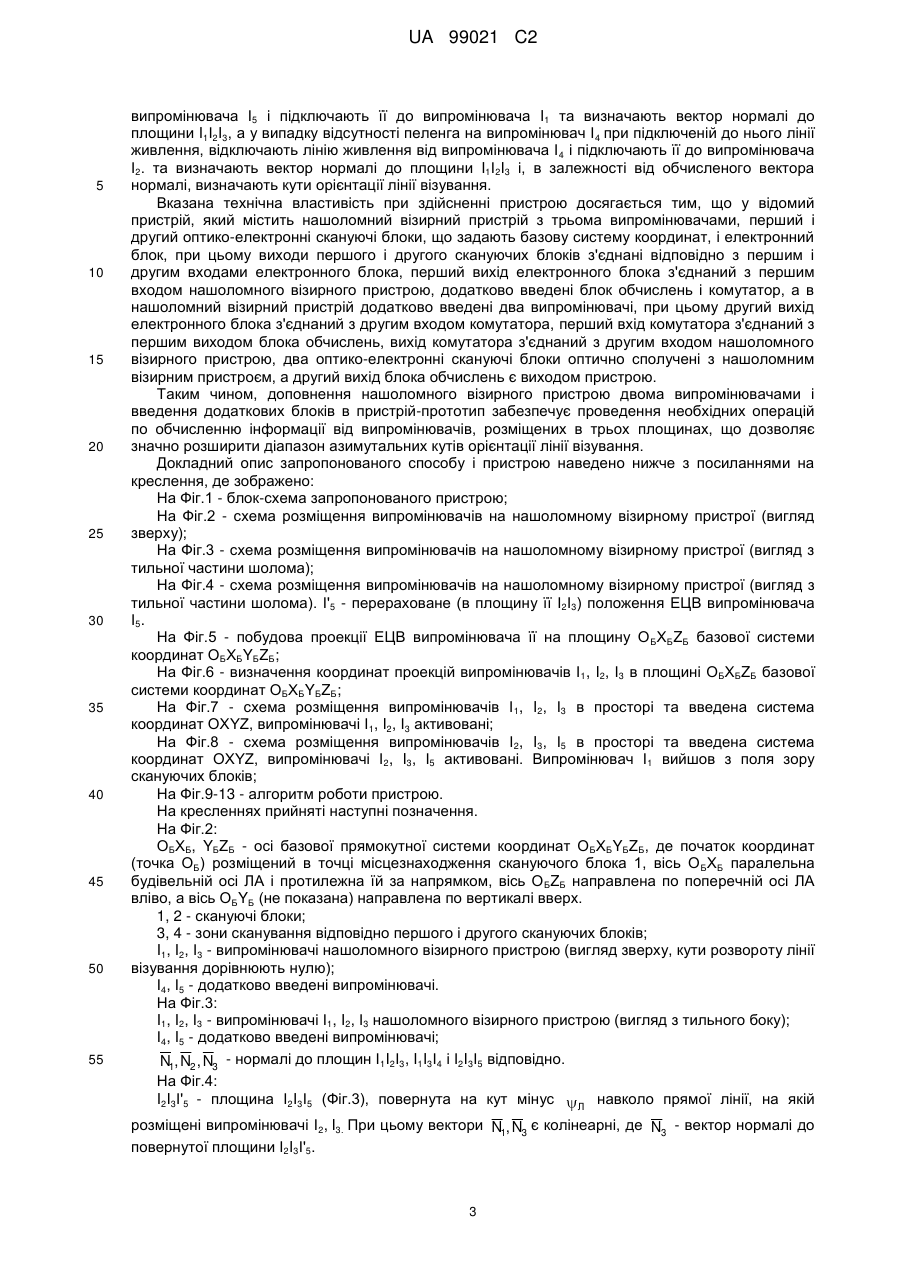
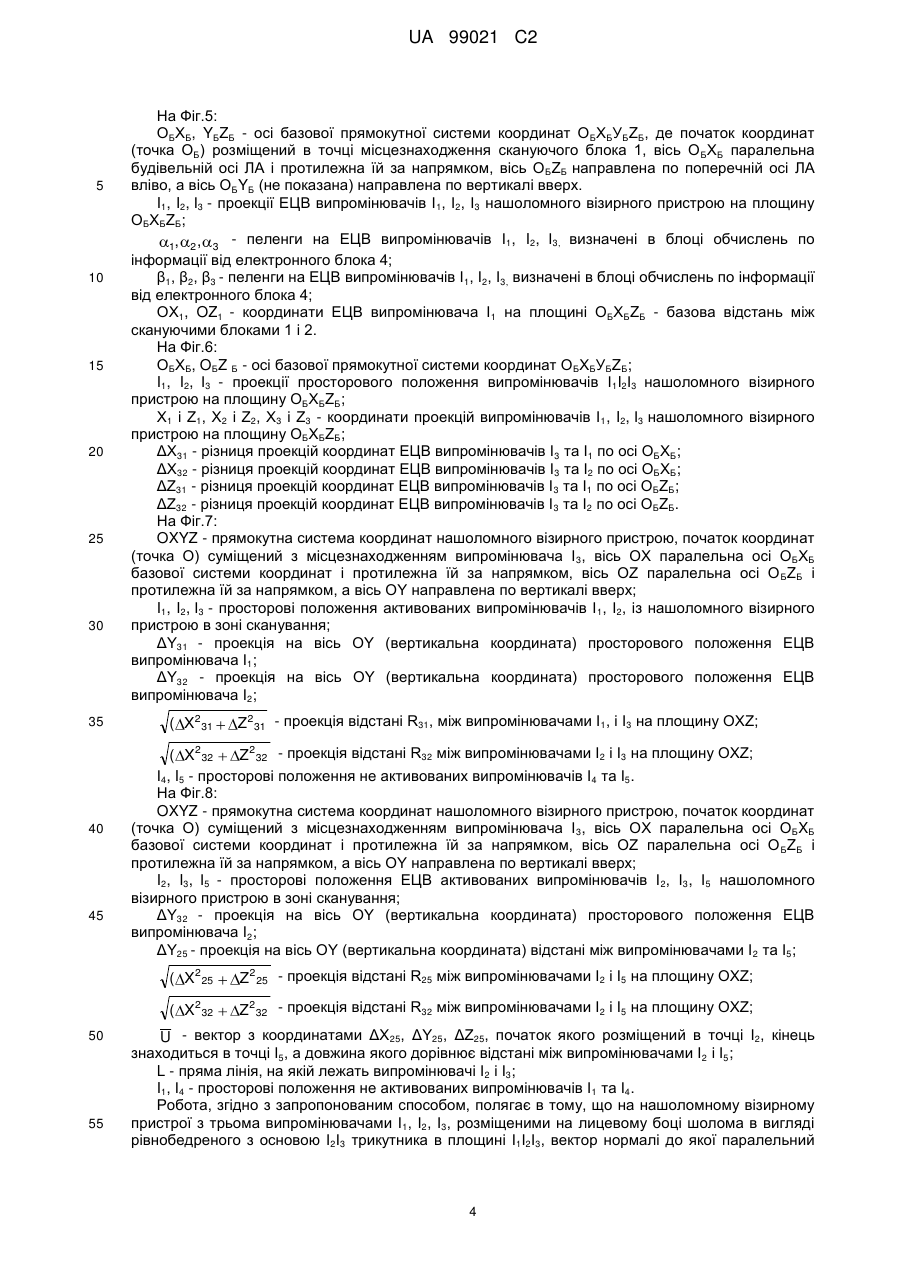
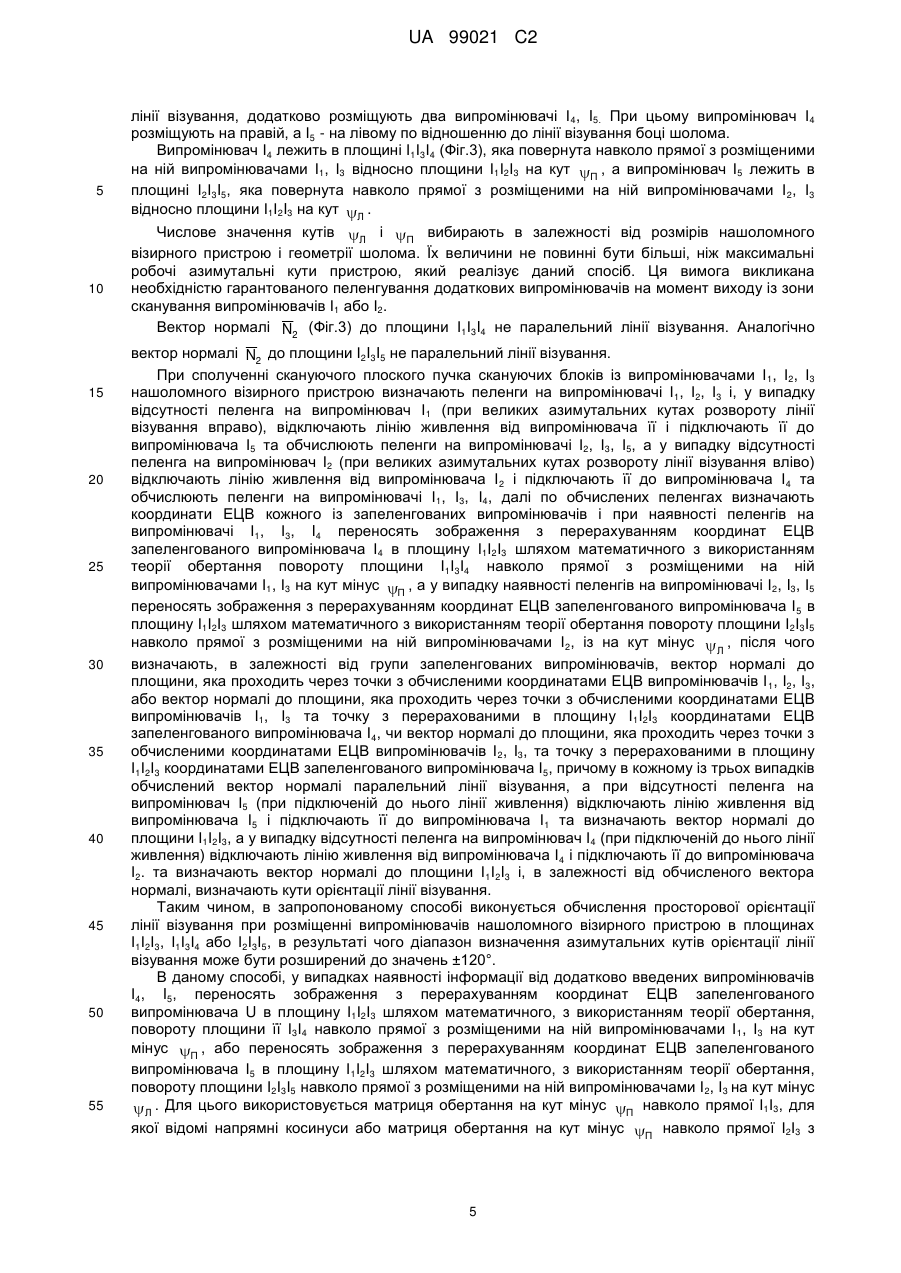
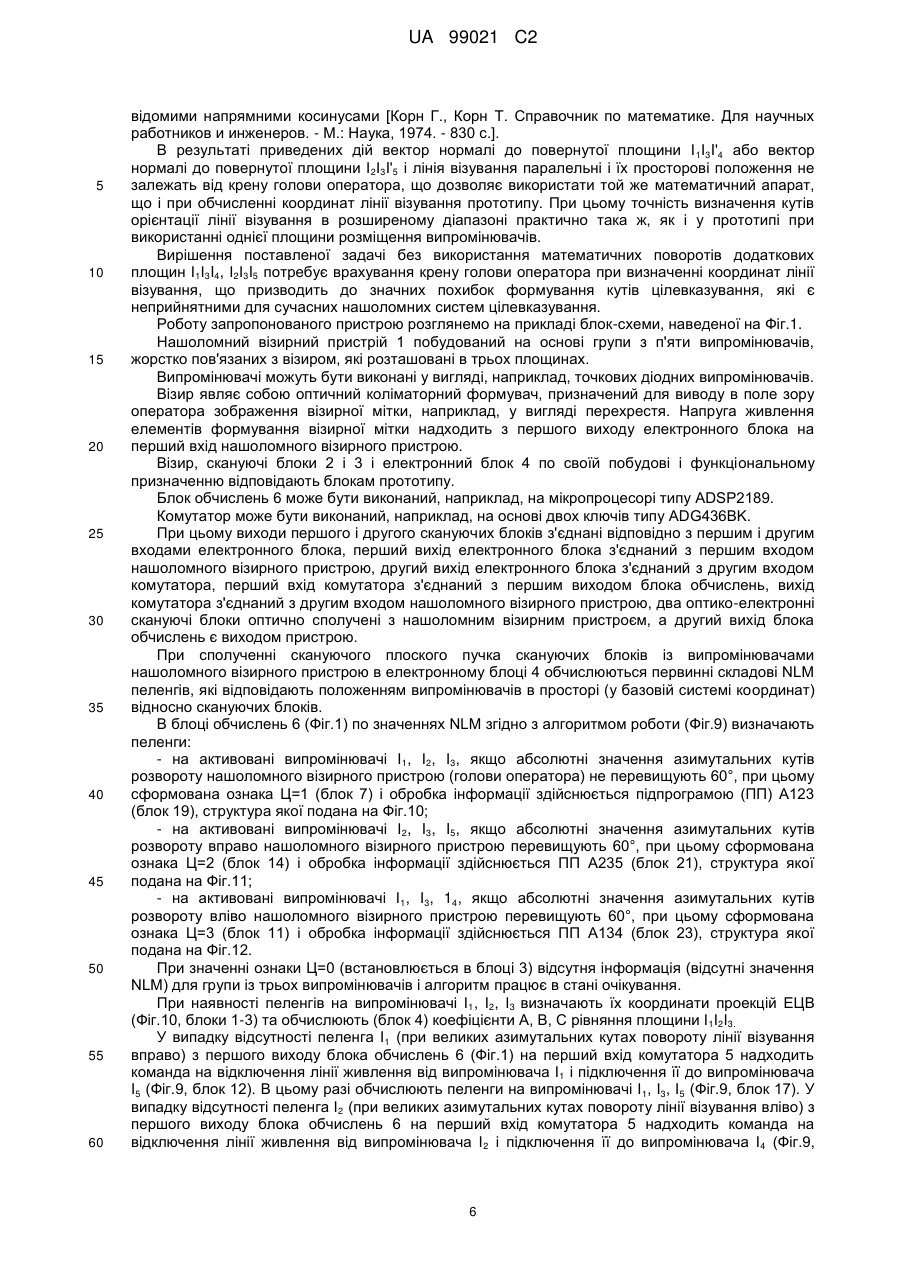
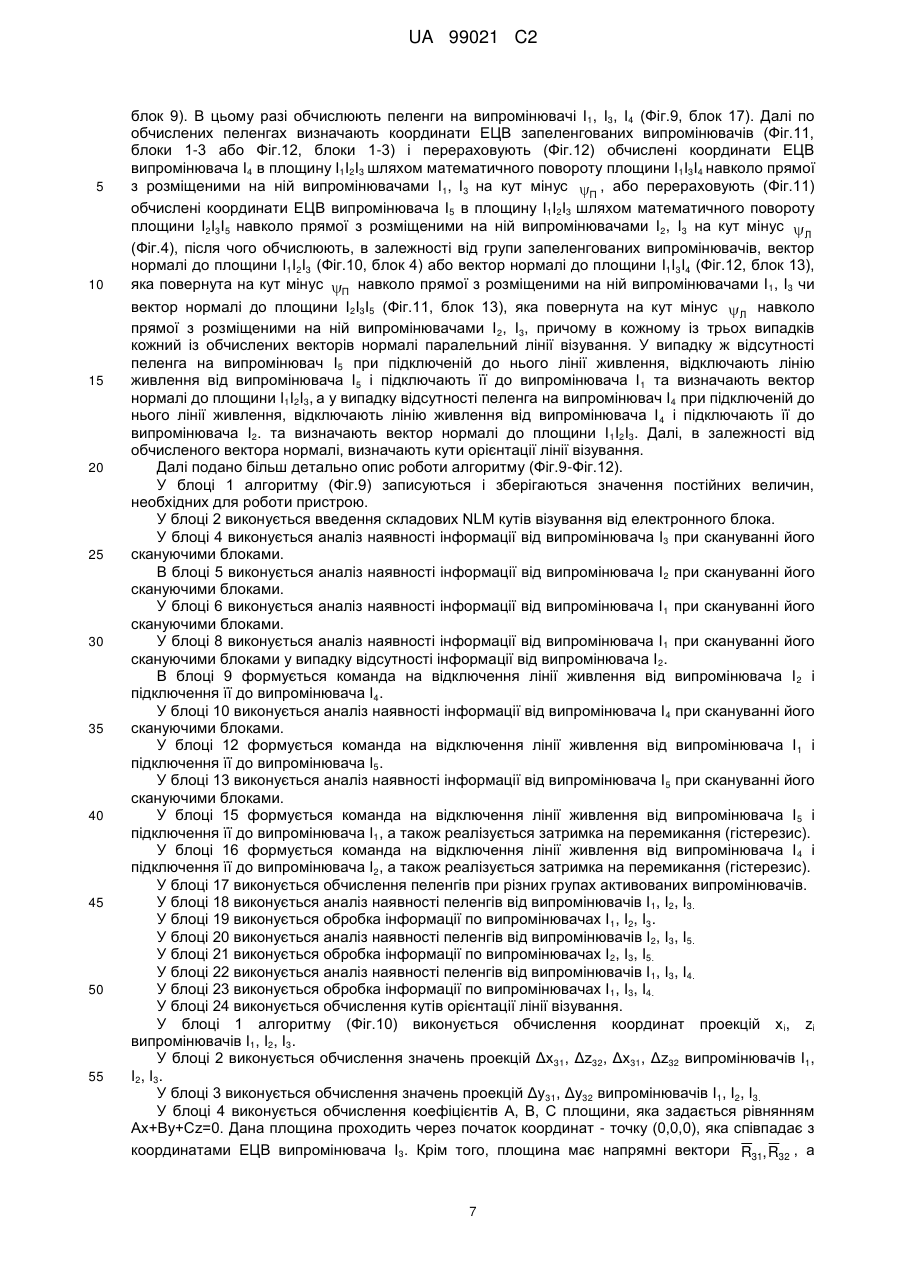
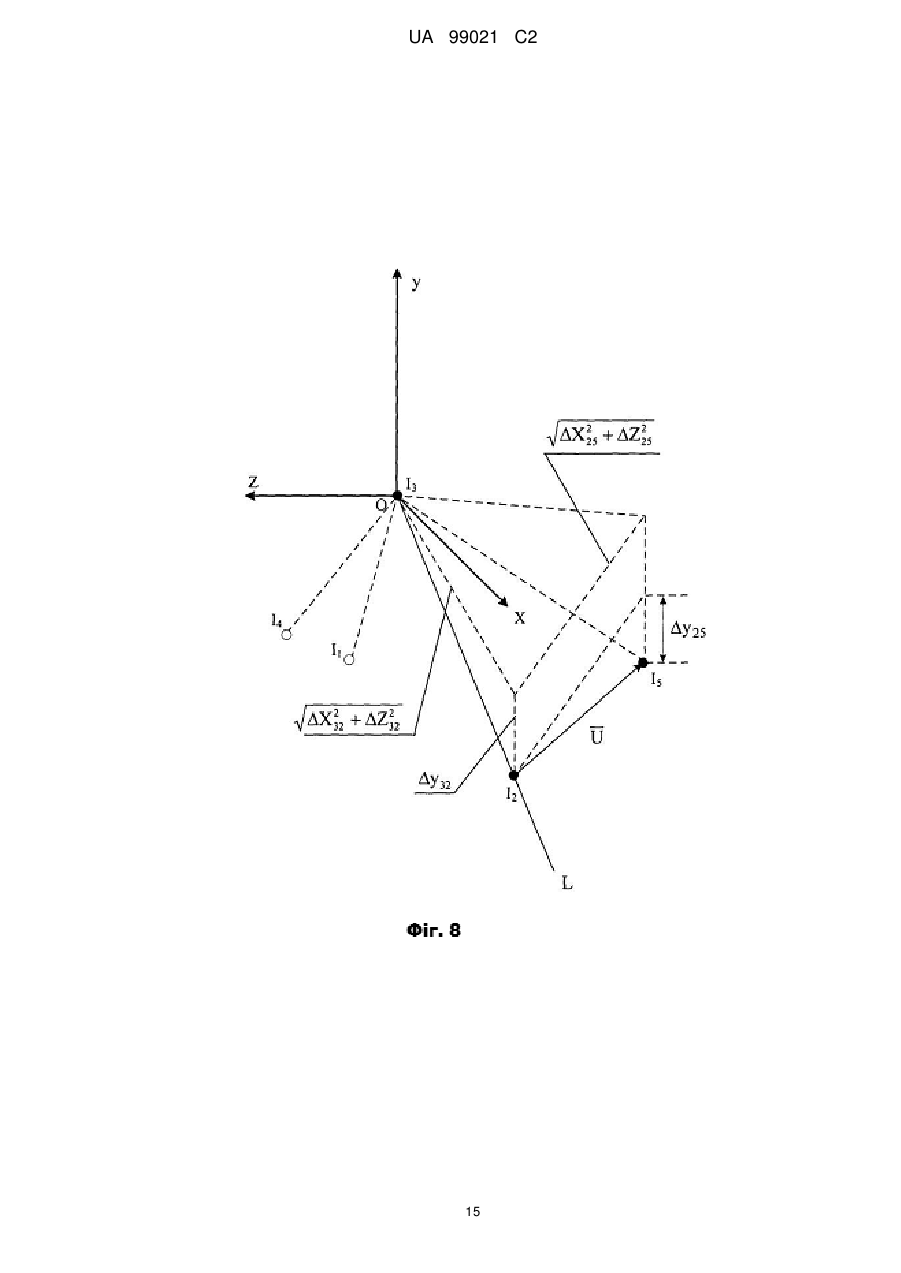
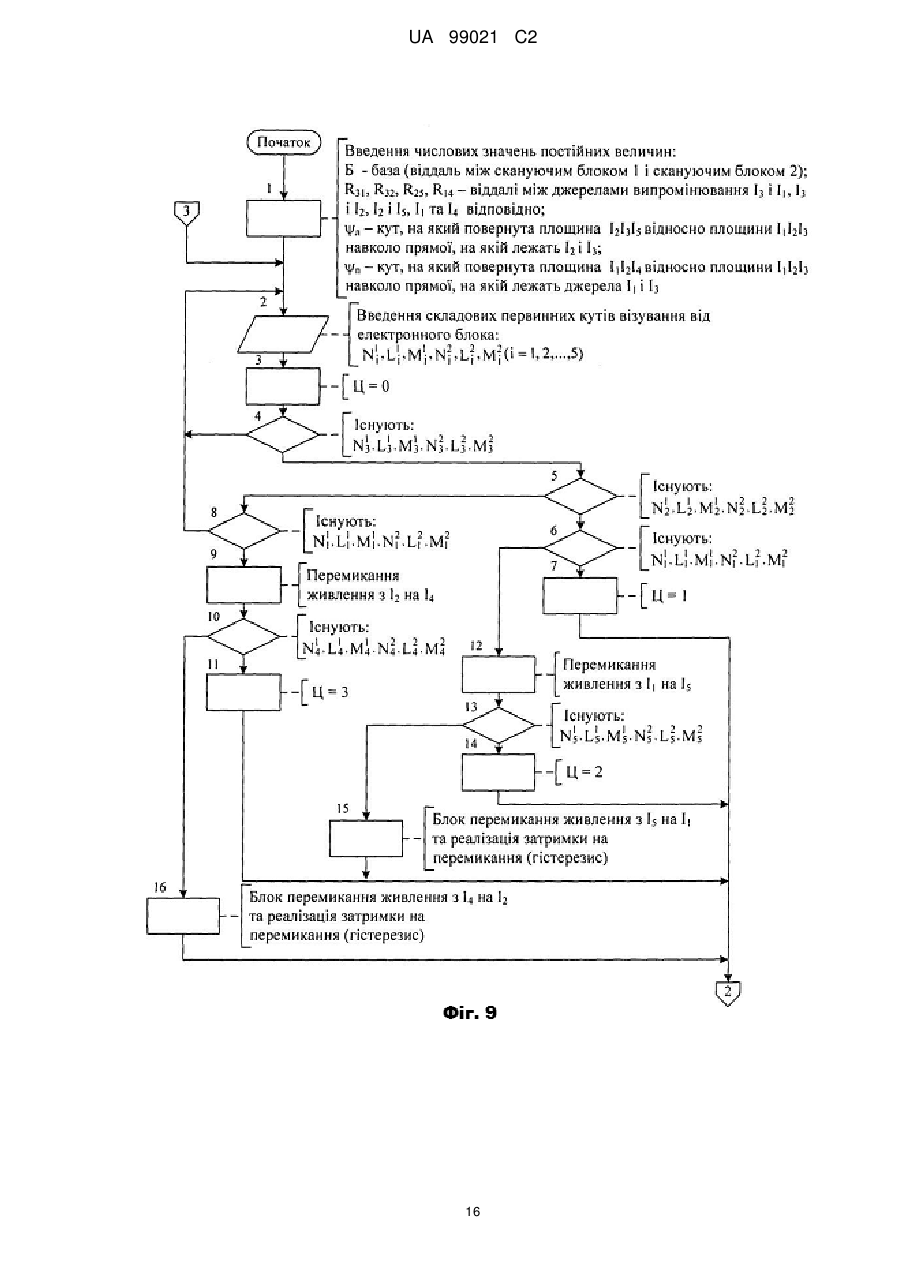
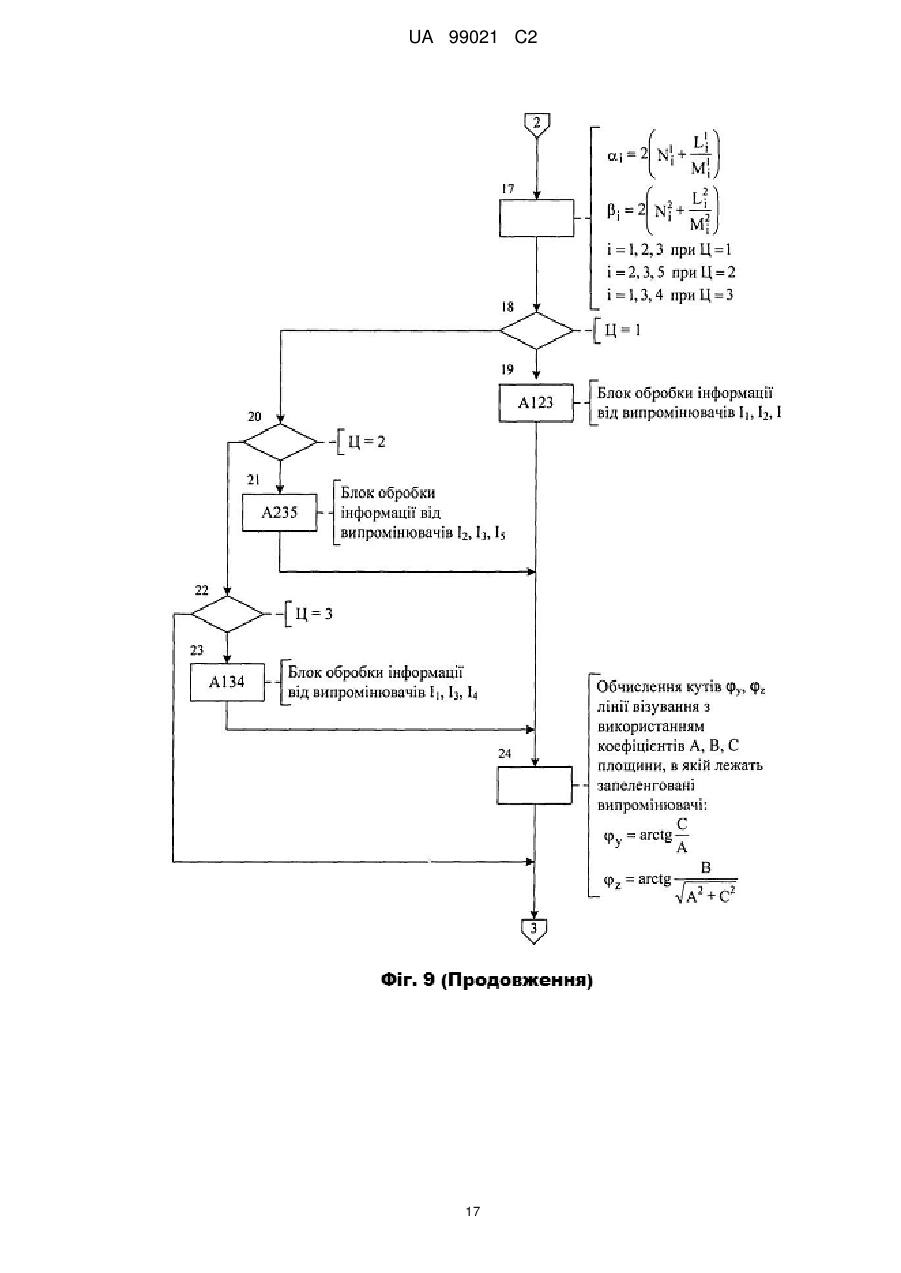
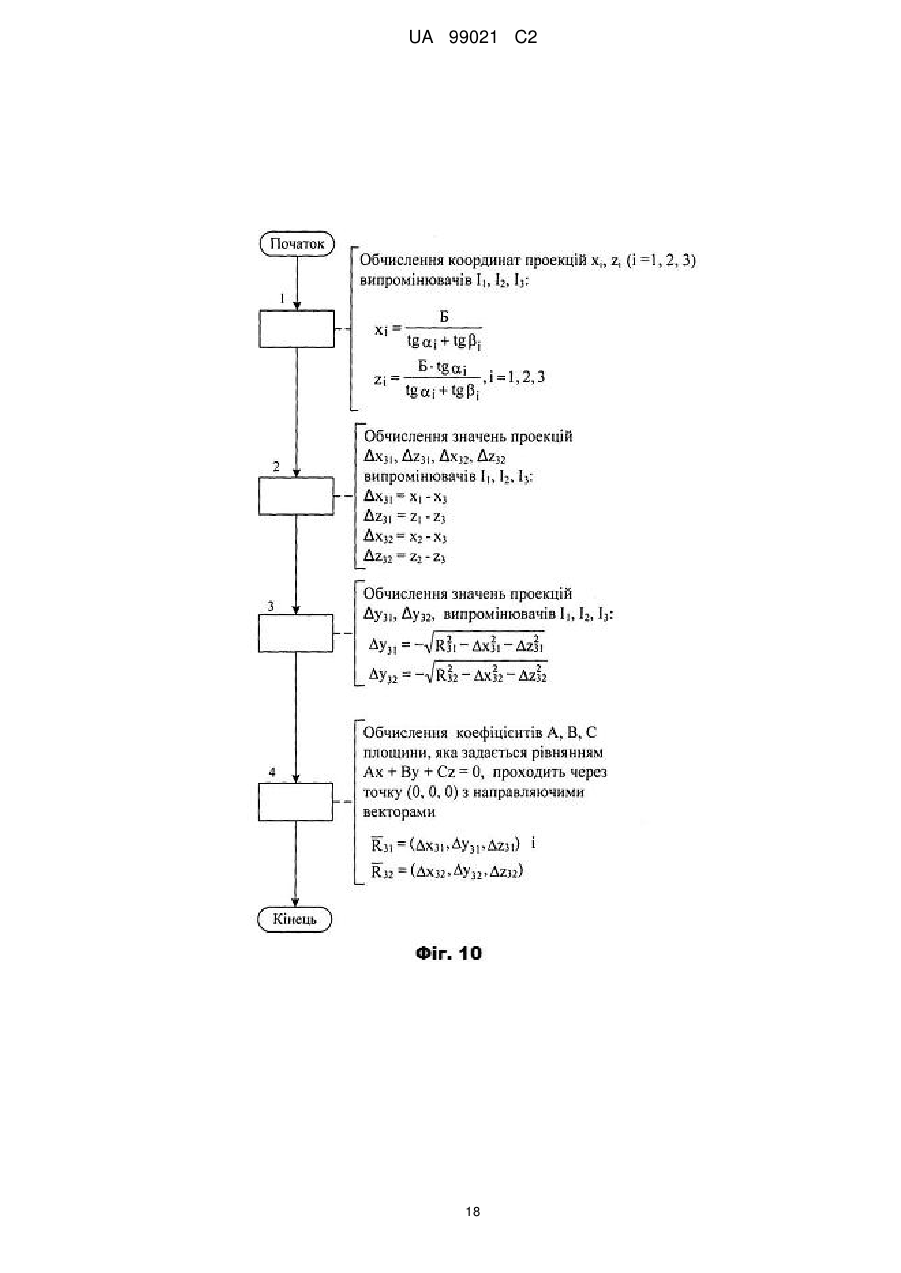
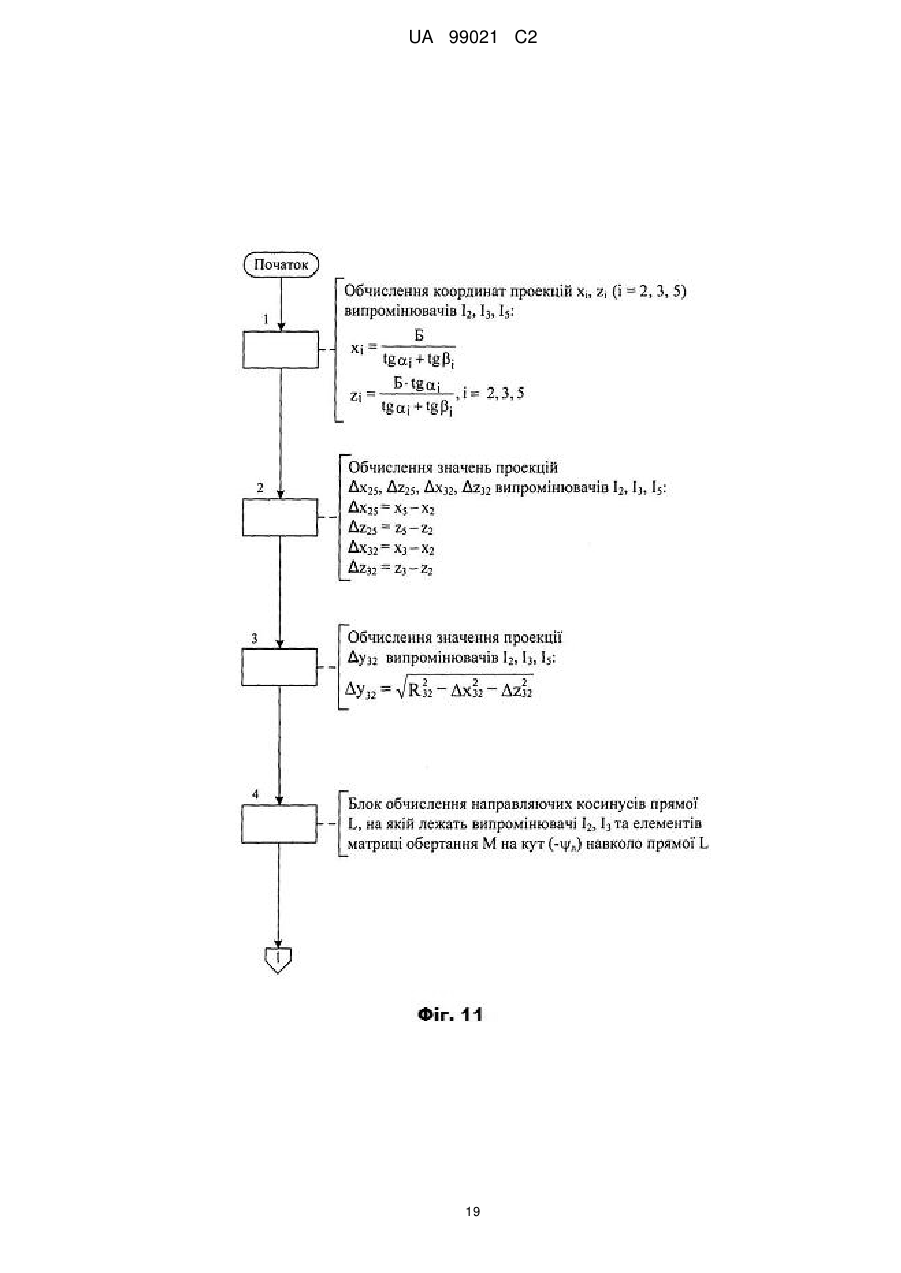
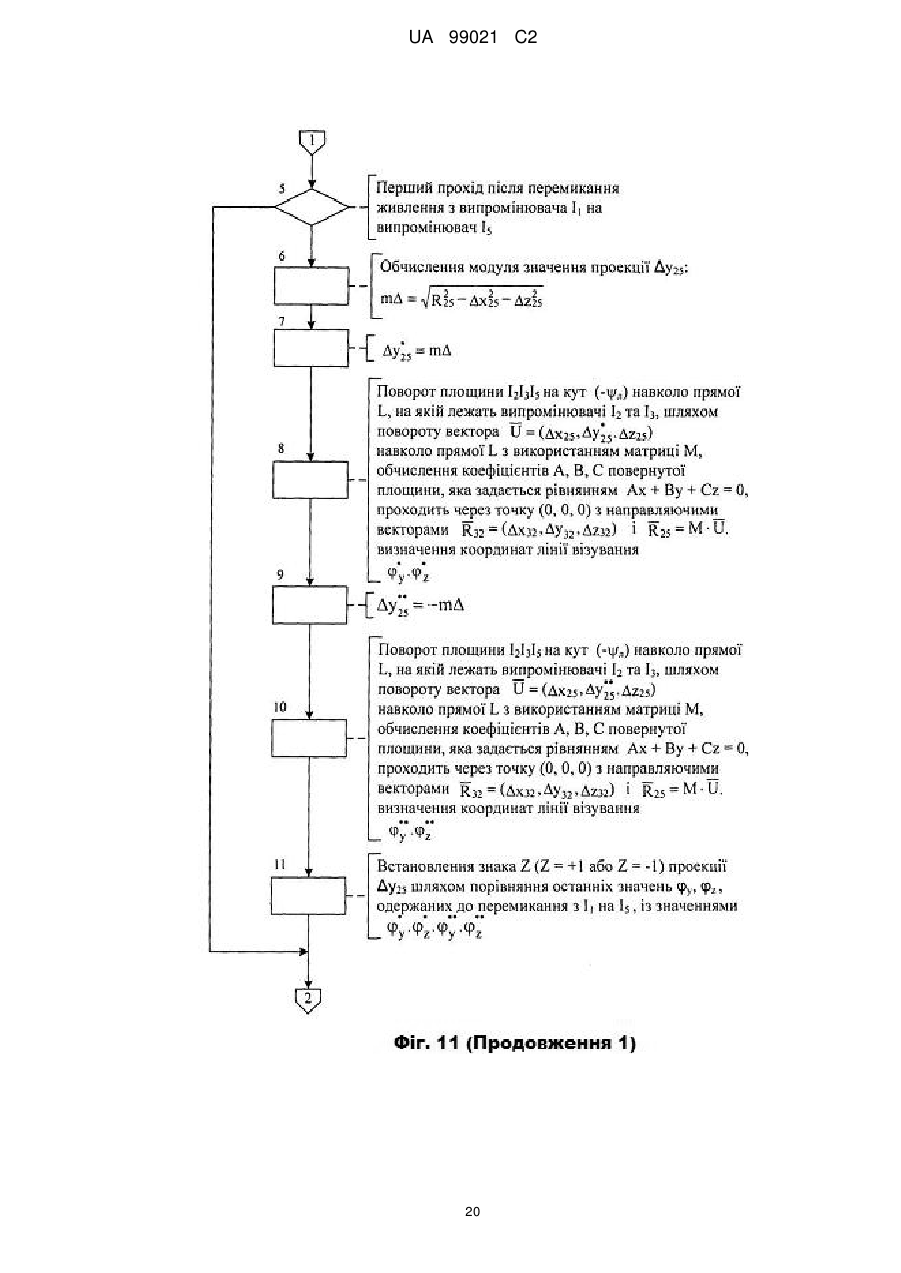
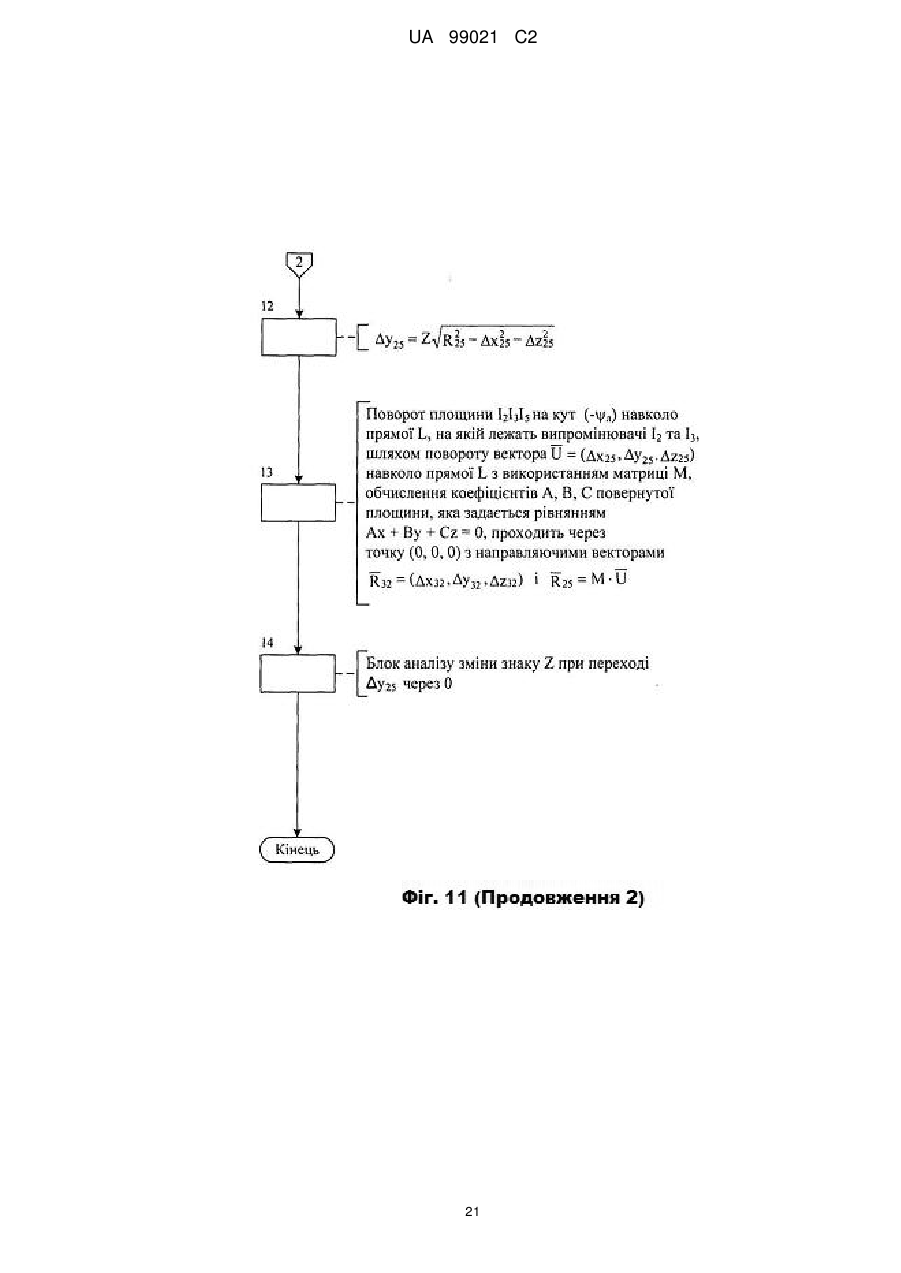
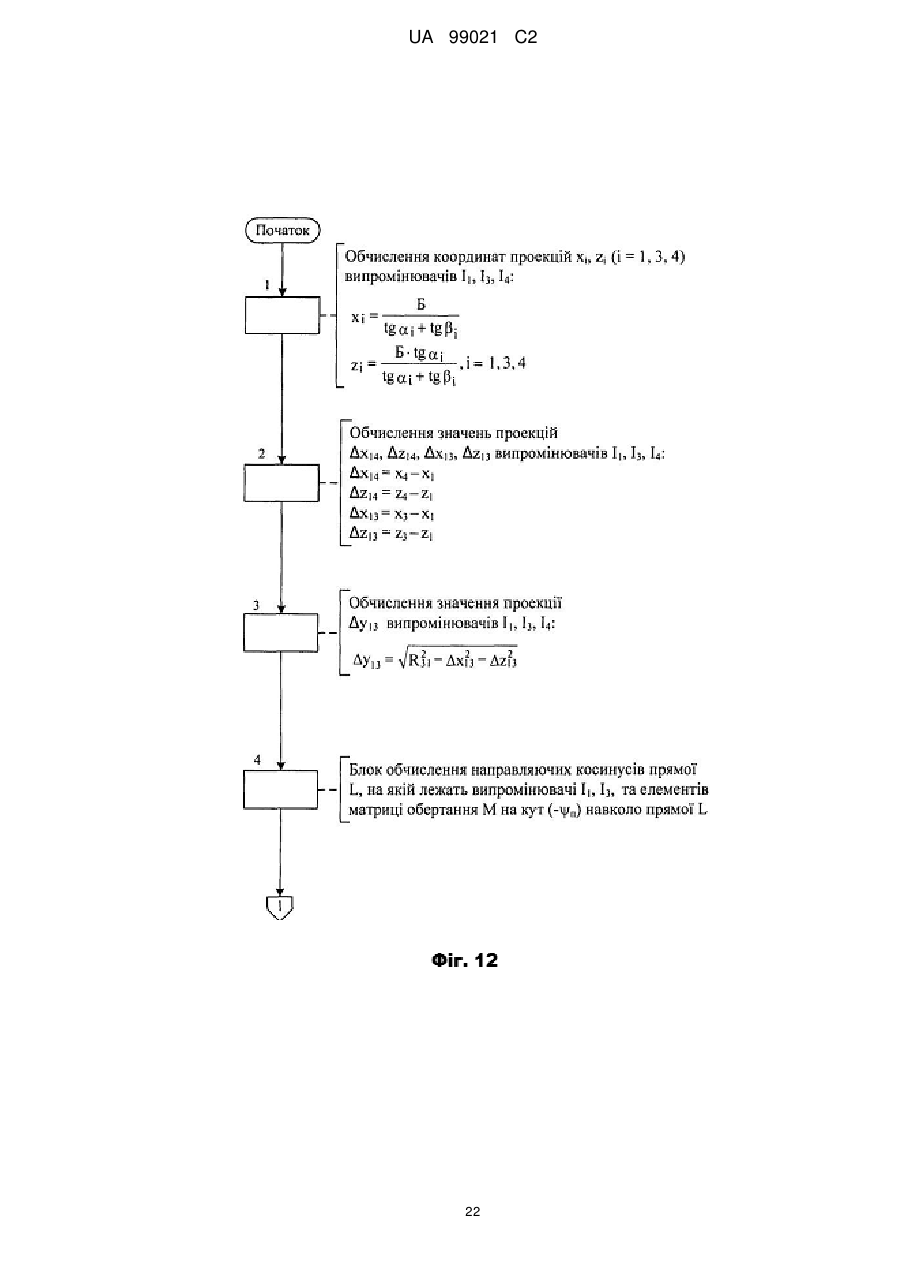
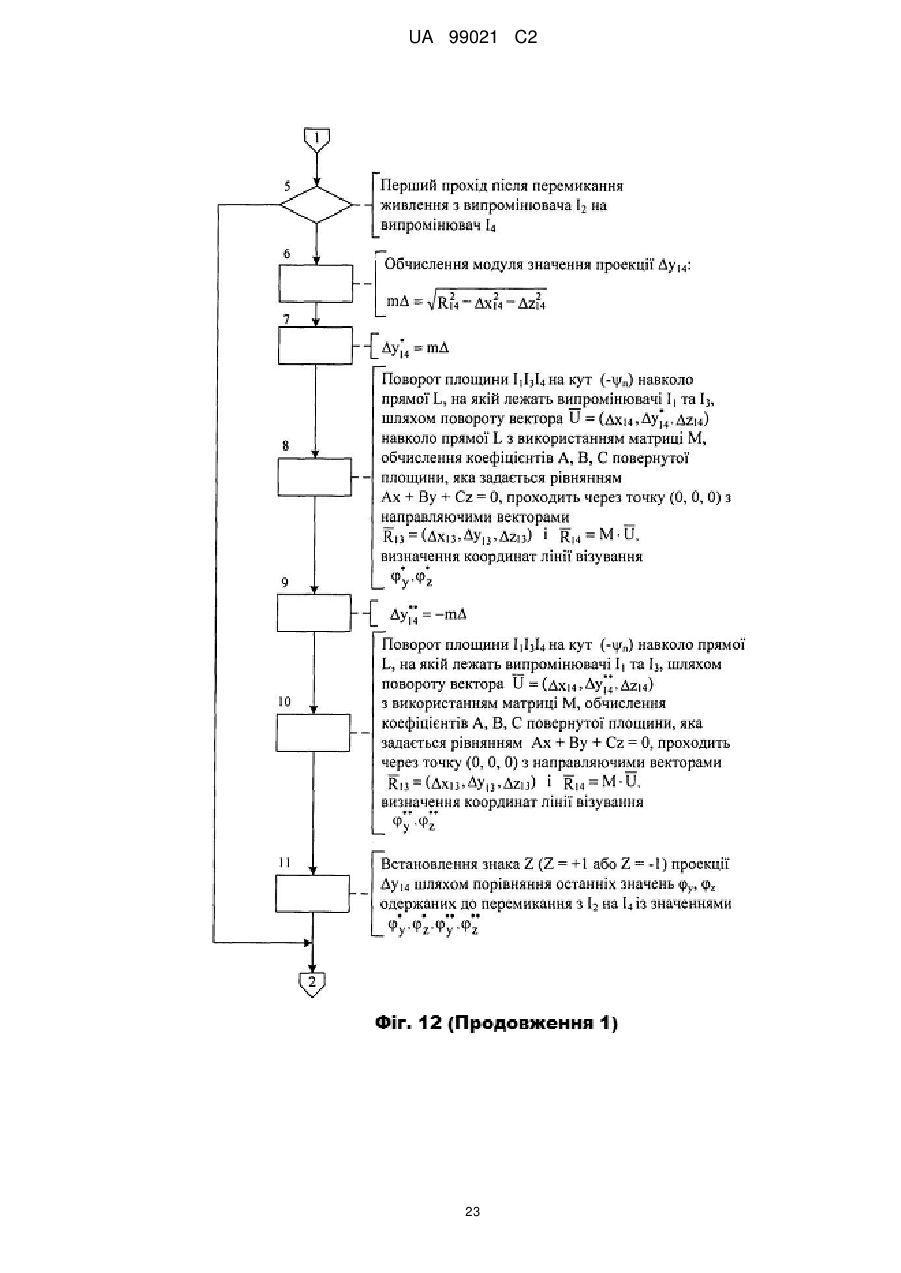
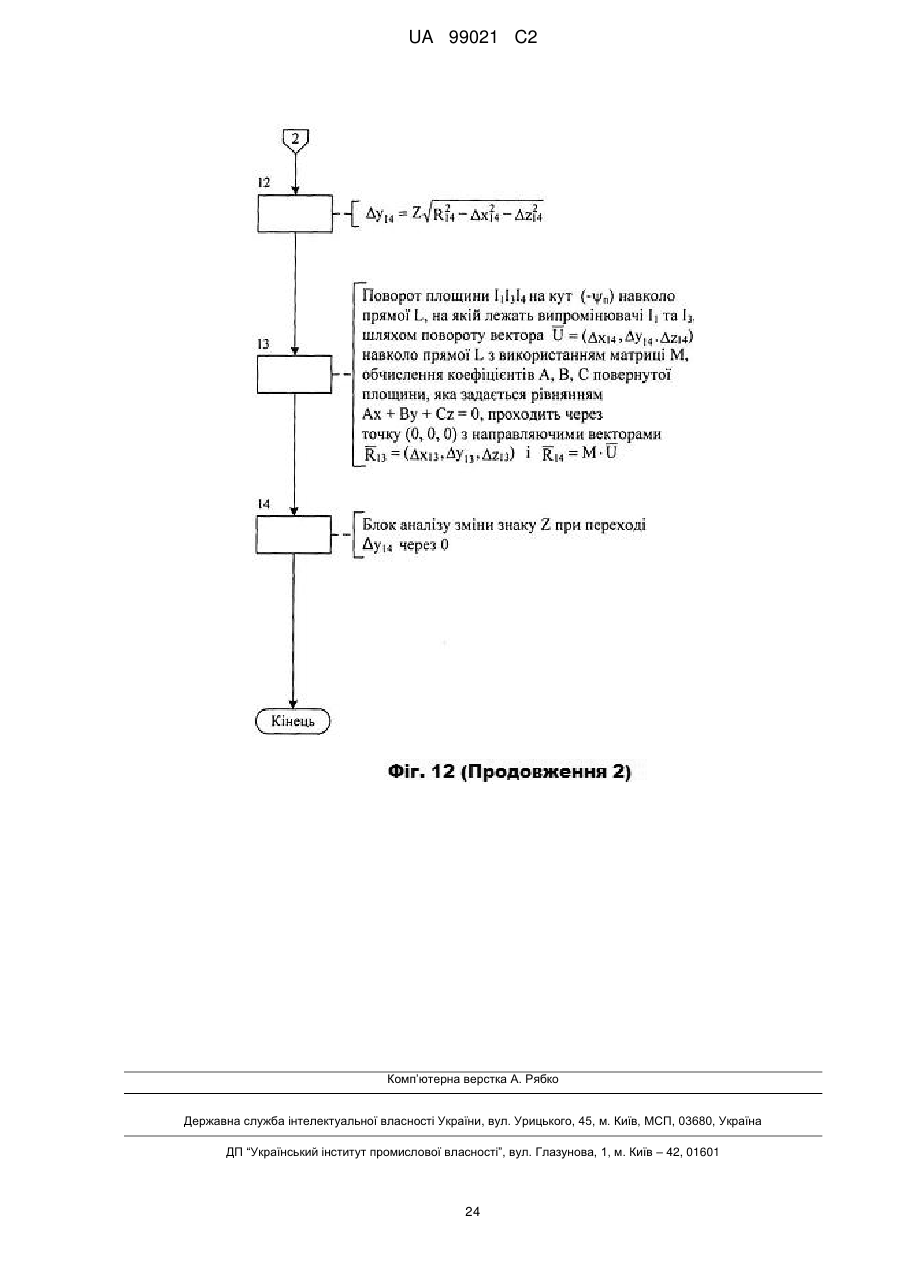
Реферат: Винахід належить до оптико-електронного приладобудування і може бути використаний при проектуванні оптико-електронних систем визначення кутів розвороту захисного шлема оператора в різних галузях техніки. Суть винаходу полягає в розширенні діапазону визначення азимутальних кутів орієнтації лінії візування нашоломних систем цілевказування (НСЦ) із збереженням точнісних характеристик серійних НСЦ. Розширення діапазону азимутальних кутів орієнтації лінії візування забезпечується введенням додаткових двох випромінювачів. Збереження точнісних характеристик НСЦ обумовлено виключенням впливу крену голови оператора на великих азимутальних кутах розвороту лінії візування на точність визначення кутів цілевказування. Винахід дозволяє збільшити більше ніж у два рази діапазон азимутальних кутів розвороту лінії візування. UA 99021 C2 (12) UA 99021 C2 UA 99021 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до оптико-електронного приладобудування, зокрема, до оптикоелектронних систем дистанційного визначення орієнтації рухомих об'єктів, і може бути використаний при створенні спеціальних систем літальних апаратів (ЛА), де використовуються дані про розвороти голови оператора. На даний час широко застосовуються для наведення різних керованих підсистем так звані нашоломні системи цілевказування (НСЦ). Ці системи базуються на пристроях дистанційного визначення орієнтації рухомих об'єктів, які в основному містять розташовані, наприклад, на шоломі оператора, реперні джерела випромінювання (РДВ), визначенно орієнтовані щодо осі візира, оптико-локаційні блоки (ОЛБ), розташовані на базовій (нерухомій) підставі, відносно якої відбувається визначення орієнтації рухомого об'єкта, та блок (блоки) визначення координат. ОЛБ задають базову систему координат, відносно якої визначають напрямки (пеленги) на кожне РДВ, що дає можливість обчислювати кути орієнтації лінії візування. В класичному розумінні направлення лінії візування характеризується двома кутами орієнтації - азимутом y і кутом місця z гіпотетичної прямої, проведеної в зв'язаній системі координат ЛА у напрямку зору пілота від ока до цілі. Аналіз роботи вищенаведених систем показує, що побудовані вони на основі способу, який визначає: - вимір пеленгів кожного РДВ; - визначення координат енергетичних центрів випромінювання РДВ за отриманими значеннями їх пеленгів і за відомою базовою відстанню між точками відліку пеленгів (відстань між ОЛБ); - визначення кутів орієнтації лінії візування за отриманими значеннями координат енергетичних центрів випромінювання РДВ. Відомий спосіб визначення кутів орієнтації лінії візування (патент США №3,375,375, 08.01.1965), згідно з яким: - сканують світловими пучками простір знаходження захисного шолома з розміщеними на ньому РДВ; - визначають пеленги на кожний РДВ; - визначають просторові координати енергетичних центрів випромінювання РДВ, використовуючи які визначають кутову орієнтацію захисного шолома. Найбільш істотним недоліком відомого способу визначення кутів орієнтації лінії візування є обмеження азимутальних кутів цілевказування зоною ±60°, так як при подальшому збільшенні цих кутів значно зростають похибки їх визначення, що суттєво знижує тактико-технічні характеристики бортових систем, наприклад, літальних апаратів. Відомий пристрій дистанційного визначення координат РДВ [патент США №3,375,375, 08.01.1965], який містить у своєму складі розташовані на боці шолома два РДВ, що розміщуються на лінії, паралельній поздовжній осі нашоломного блока індикації, а також розміщені на нерухомій частині об'єкта оптико-локаційний і електронний блоки. Розміщення РДВ на боковій частині шолома, а ОЛБ на боковій частині кабіни, яка не має жорсткої прив'язки до зв'язаної системи координат ЛА, приводить до значних похибок визначення кутів орієнтації лінії візування. Найбільш істотним недоліком відомого пристрою є сканування ОЛБ тільки двох РДВ, що приводить до обмеження значень азимутальних кутів цілевказування і, як наслідок, до зниження тактико-технічних характеристик бортових систем літальних апаратів. Найбільш близьким до способу, що заявляється, за сукупністю ознак є спосіб визначення кутів орієнтації лінії візування, поставлений в основу побудови нашоломної системи цілевказування та індикації [деклараційний патент UA 50587], згідно з яким: - формують кожним скануючим блоком вузьке вертикальне миттєве поле зору і сканують ним внутрішньокабінний простір; - формують три послідовності імпульсів струму для живлення трьох РДВ нашоломного візирного пристрою; - випромінюють три послідовності імпульсів інфрачервоного кольору при проходженні миттєвого поля зору скануючих блоків енергетичних центрів випромінювання кожного випромінювача; - визначають первинні складові кутів цілевказування (NLM). Даний спосіб прийнято за прототип. До істотного недоліку способу, прийнятого за прототип, варто віднести обмеження робочого діапазону азимутальних кутів цілевказування НСЦ до значень ±60°, так як випромінювачі розміщені на нашоломному візирному пристрої в одній площині і при великих азимутальниих 1 UA 99021 C2 5 10 15 20 25 30 35 40 45 50 55 кутах ( 60°) розвороту голови оператора буде наступати затінення випромінювачів елементами конструкції нашоломного візирного пристрою, що приводить до неможливості визначення даним способом кутів орієнтації лінії візування. Таким чином, даному способу визначення кутів орієнтації лінії візування властиві обмеження азимутальних кутів розвороту голови оператора, що знижує ефективність застосування НСЦ. Найбільш близьким пристроєм, що заявляється, за сукупністю ознак є нашоломна система цілевказування [деклараційний патент UA 50587, 15.10.2002]. Даний пристрій містить нашоломний візирний пристрій з трьома випромінювачами, два оптико-електронні скануючі блоки і електронний блок. Вказані блоки забезпечують визначення первинних складових кутів цілевказування. Даний пристрій прийнято за прототип. Суттєвим недоліком даного пристрою є обмеження азимутальних кутів розвороту голови оператора діапазоном ±60°, пов'язане з наявністю тільки однієї площини розміщення випромінювачів. Перед авторами стояло завдання створення групи винаходів, що дозволять суттєво розширити діапазон азимутальних кутів орієнтації лінії візування. Вказана технічна властивість при здійсненні способу досягається тим, що у відомому способі визначення кутів орієнтації лінії візування нашоломною системою цілевказування і індикації, яка побудована на основі двох оптико-електронних скануючих блоків, електронного блока і нашоломного візирного пристрою з трьома випромінювачами I 1, I2, І3, розміщеними на лицевому боці шолома у вигляді рівнобедреного з основою I 1I2 трикутника в площині I1I2І3, вектор нормалі до якої паралельний лінії візування, причому випромінювач I 2 розміщений в лівій, а I1 - в правій частинах лицевого боку шолома, що включає формування кожним скануючим блоком вузького вертикального миттєвого поля зору і сканування ним внутрішньокабінного простору, формування трьох послідовностей імпульсів струму для живлення трьох випромінювачів нашоломного візирного пристрою, випромінювання трьох послідовностей імпульсів інфрачервоного кольору при проходженні миттєвого поля зору скануючих блоків енергетичних центрів випромінювання (ЕЦВ) кожного випромінювача і формування первинних складових кутів цілевказування, додатково вводять в нашоломний візирний пристрій два випромінювачі І4, І5 і розміщують випромінювач І4 на правому, а І5 - на лівому по відношенню до лінії візування боках шолома, причому випромінювач І 4 лежить в площині I1І3I4, яка повернута навколо прямої з розміщеними на ній випромінювачами І1, І3 відносно площини I1І2I3 на кут П і вектор нормалі до якої не паралельний лінії візування, а випромінювач І5 лежить в площині І2І3I5, яка повернута навколо прямої з розміщеними на ній випромінювачами І2, І3 відносно площини І1І2І3 на кут і вектор нормалі до якої не Л паралельний лінії візування, при цьому визначають пеленги на випромінювачі І 1, І2, І3 і при відсутності пеленга на випромінювач І1 (при великих азимутальних кутах розвороту лінії візування вправо) відключають лінію живлення від випромінювача I1 і підключають її до випромінювача І5 та обчислюють пеленги на випромінювачі І2, I3, I5, а у випадку відсутності пеленга на випромінювач І2 (при великих азимутальних кутах розвороту лінії візування вліво) відключають лінію живлення від випромінювача І 2 і підключають її до випромінювача I4 та обчислюють пеленги на випромінювачі I1, I3, I4, далі по обчислених пеленгах визначають координати ЕЦВ кожного із запеленгованих випромінювачів і при наявності пеленгів на випромінювачі І1, I3, I4 переносять зображення з перерахуванням координат ЕЦВ запеленгованого випромінювача I4 в площину I1І2I3 шляхом математичного, з використанням теорії обертання, повороту площини її I1I3I4 навколо прямої з розміщеними на ній випромінювачами I1, I3 на кут мінус П , а у випадку наявності пеленгів на випромінювачі І 2, І3, І5 переносять зображення з перерахуванням координат ЕЦВ запеленгованого випромінювача І 5 в площину I1І2I3 шляхом математичного, з використанням теорії обертання, повороту площини І2 І3 І5 навколо прямої з розміщеними на ній випромінювачами І2, І3 на кут мінус Л , після чого визначають, в залежності від групи запеленгованих випромінювачів, вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів I1, І2, I3 або вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів I1, I3 та точку з перерахованими в площину I1, І2, I3 координатами ЕЦВ запеленгованого випромінювача І4, або вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів І2, І3 та точку з перерахованими в площину I1І2I3 координатами ЕЦВ запеленгованого випромінювача I 5, причому в кожному із трьох випадків кожний із обчислених векторів нормалі паралельний лінії візування, а при відсутності пеленга на випромінювач І5 при підключеній до нього лінії живлення, відключають лінію живлення від 2 UA 99021 C2 5 10 15 20 25 30 35 40 45 50 55 випромінювача І5 і підключають її до випромінювача I1 та визначають вектор нормалі до площини I1І2I3, а у випадку відсутності пеленга на випромінювач І 4 при підключеній до нього лінії живлення, відключають лінію живлення від випромінювача І 4 і підключають її до випромінювача І2. та визначають вектор нормалі до площини I1І2I3 і, в залежності від обчисленого вектора нормалі, визначають кути орієнтації лінії візування. Вказана технічна властивість при здійсненні пристрою досягається тим, що у відомий пристрій, який містить нашоломний візирний пристрій з трьома випромінювачами, перший і другий оптико-електронні скануючі блоки, що задають базову систему координат, і електронний блок, при цьому виходи першого і другого скануючих блоків з'єднані відповідно з першим і другим входами електронного блока, перший вихід електронного блока з'єднаний з першим входом нашоломного візирного пристрою, додатково введені блок обчислень і комутатор, а в нашоломний візирний пристрій додатково введені два випромінювачі, при цьому другий вихід електронного блока з'єднаний з другим входом комутатора, перший вхід комутатора з'єднаний з першим виходом блока обчислень, вихід комутатора з'єднаний з другим входом нашоломного візирного пристрою, два оптико-електронні скануючі блоки оптично сполучені з нашоломним візирним пристроєм, а другий вихід блока обчислень є виходом пристрою. Таким чином, доповнення нашоломного візирного пристрою двома випромінювачами і введення додаткових блоків в пристрій-прототип забезпечує проведення необхідних операцій по обчисленню інформації від випромінювачів, розміщених в трьох площинах, що дозволяє значно розширити діапазон азимутальних кутів орієнтації лінії візування. Докладний опис запропонованого способу і пристрою наведено нижче з посиланнями на креслення, де зображено: На Фіг.1 - блок-схема запропонованого пристрою; На Фіг.2 - схема розміщення випромінювачів на нашоломному візирному пристрої (вигляд зверху); На Фіг.3 - схема розміщення випромінювачів на нашоломному візирному пристрої (вигляд з тильної частини шолома); На Фіг.4 - схема розміщення випромінювачів на нашоломному візирному пристрої (вигляд з тильної частини шолома). I'5 - перераховане (в площину її І2І3) положення ЕЦВ випромінювача І5. На Фіг.5 - побудова проекції ЕЦВ випромінювача її на площину О БХБZБ базової системи координат ОБХБYБZБ; На Фіг.6 - визначення координат проекцій випромінювачів I1, I2, І3 в площині ОБХБZБ базової системи координат ОБХБYБZБ; На Фіг.7 - схема розміщення випромінювачів I1, I2, І3 в просторі та введена система координат OXYZ, випромінювачі I1, I2, І3 активовані; На Фіг.8 - схема розміщення випромінювачів I2, I3, І5 в просторі та введена система координат OXYZ, випромінювачі I2, I3, І5 активовані. Випромінювач І1 вийшов з поля зору скануючих блоків; На Фіг.9-13 - алгоритм роботи пристрою. На кресленнях прийняті наступні позначення. На Фіг.2: ОБХБ, YБZБ - осі базової прямокутної системи координат ОБХБYБZБ, де початок координат (точка ОБ) розміщений в точці місцезнаходження скануючого блока 1, вісь О БХБ паралельна будівельній осі ЛА і протилежна їй за напрямком, вісь О БZБ направлена по поперечній осі ЛА вліво, а вісь ОБYБ (не показана) направлена по вертикалі вверх. 1, 2 - скануючі блоки; 3, 4 - зони сканування відповідно першого і другого скануючих блоків; I1, I2, І3 - випромінювачі нашоломного візирного пристрою (вигляд зверху, кути розвороту лінії візування дорівнюють нулю); І4, І5 - додатково введені випромінювачі. На Фіг.3: I1, I2, І3 - випромінювачі I1, I2, І3 нашоломного візирного пристрою (вигляд з тильного боку); І4, I5 - додатково введені випромінювачі; N1, N2 , N3 - нормалі до площин I1I2І3, I1I3І4 і I2I3І5 відповідно. На Фіг.4: I2I3І'5 - площина I2I3І5 (Фіг.3), повернута на кут мінус навколо прямої лінії, на якій Л розміщені випромінювачі I2, I3. При цьому вектори N1, N3 є колінеарні, де N3 - вектор нормалі до повернутої площини I2I3І'5. 3 UA 99021 C2 5 10 15 20 25 30 35 40 45 На Фіг.5: ОБХБ, YБZБ - осі базової прямокутної системи координат ОБХБУБZБ, де початок координат (точка ОБ) розміщений в точці місцезнаходження скануючого блока 1, вісь О БХБ паралельна будівельній осі ЛА і протилежна їй за напрямком, вісь О БZБ направлена по поперечній осі ЛА вліво, а вісь ОБYБ (не показана) направлена по вертикалі вверх. I1, I2, І3 - проекції ЕЦВ випромінювачів I 1, І2, І3 нашоломного візирного пристрою на площину ОБХБZБ; - пеленги на ЕЦВ випромінювачів I1, I2, І3, визначені в блоці обчислень по 1, 2 , 3 інформації від електронного блока 4; β1, β2, β3 - пеленги на ЕЦВ випромінювачів I1, І2, І3, визначені в блоці обчислень по інформації від електронного блока 4; ОХ1, OZ1 - координати ЕЦВ випромінювача І1 на площині ОБХБZБ - базова відстань між скануючими блоками 1 і 2. На Фіг.6: ОБХБ, OБZ Б - осі базової прямокутної системи координат О БХБУБZБ; I1, I2, І3 - проекції просторового положення випромінювачів I1I2І3 нашоломного візирного пристрою на площину ОБХБZБ; Х1 і Z1, Х2 і Z2, Х3 і Z3 - координати проекцій випромінювачів I1, I2, І3 нашоломного візирного пристрою на площину ОБХБZБ; ΔХ31 - різниця проекцій координат ЕЦВ випромінювачів І3 та I1 по осі ОБХБ; ΔХ32 - різниця проекцій координат ЕЦВ випромінювачів І3 та І2 по осі ОБХБ; ΔZ31 - різниця проекцій координат ЕЦВ випромінювачів І3 та I1 по осі ОБZБ; ΔZ32 - різниця проекцій координат ЕЦВ випромінювачів І3 та І2 по осі ОБZБ. На Фіг.7: OXYZ - прямокутна система координат нашоломного візирного пристрою, початок координат (точка О) суміщений з місцезнаходженням випромінювача І 3, вісь ОХ паралельна осі ОБХБ базової системи координат і протилежна їй за напрямком, вісь OZ паралельна осі О БZБ і протилежна їй за напрямком, а вісь OY направлена по вертикалі вверх; I1, I2, І3 - просторові положення активованих випромінювачів І1, І2, із нашоломного візирного пристрою в зоні сканування; ΔY31 - проекція на вісь ОY (вертикальна координата) просторового положення ЕЦВ випромінювача I1; ΔY32 - проекція на вісь ОY (вертикальна координата) просторового положення ЕЦВ випромінювача І2; ( X231 Z231 - проекція відстані R31, між випромінювачами І1, і І3 на площину OXZ; ( X232 Z232 - проекція відстані R32 між випромінювачами І2 і І3 на площину OXZ; І4, I5 - просторові положення не активованих випромінювачів І4 та І5. На Фіг.8: OXYZ - прямокутна система координат нашоломного візирного пристрою, початок координат (точка О) суміщений з місцезнаходженням випромінювача І 3, вісь ОХ паралельна осі ОБXБ базової системи координат і протилежна їй за напрямком, вісь OZ паралельна осі О БZБ і протилежна їй за напрямком, а вісь OY направлена по вертикалі вверх; I2, I3, І5 - просторові положення ЕЦВ активованих випромінювачів І 2, І3, І5 нашоломного візирного пристрою в зоні сканування; ΔY32 - проекція на вісь OY (вертикальна координата) просторового положення ЕЦВ випромінювача І2; ΔY25 - проекція на вісь OY (вертикальна координата) відстані між випромінювачами І 2 та I5; ( X225 ( X232 50 55 Z225 - проекція відстані R25 між випромінювачами І2 і I5 на площину OXZ; Z232 - проекція відстані R32 між випромінювачами І2 і І5 на площину OXZ; U - вектор з координатами ΔХ25, ΔY25, ΔZ25, початок якого розміщений в точці І2, кінець знаходиться в точці І5, а довжина якого дорівнює відстані між випромінювачами І2 і І5; L - пряма лінія, на якій лежать випромінювачі І2 і І3; I1, І4 - просторові положення не активованих випромінювачів I1 та І4. Робота, згідно з запропонованим способом, полягає в тому, що на нашоломному візирному пристрої з трьома випромінювачами І1, І2, І3, розміщеними на лицевому боці шолома в вигляді рівнобедреного з основою І2І3 трикутника в площині І1І2І3, вектор нормалі до якої паралельний 4 UA 99021 C2 5 10 15 20 25 30 35 40 45 50 55 лінії візування, додатково розміщують два випромінювачі І4, I5. При цьому випромінювач І4 розміщують на правій, а І5 - на лівому по відношенню до лінії візування боці шолома. Випромінювач І4 лежить в площині I1І3І4 (Фіг.3), яка повернута навколо прямої з розміщеними на ній випромінювачами I1, І3 відносно площини I1І2І3 на кут П , а випромінювач І5 лежить в площині І2І3I5, яка повернута навколо прямої з розміщеними на ній випромінювачами І 2, І3 відносно площини I1І2I3 на кут Л . Числове значення кутів і вибирають в залежності від розмірів нашоломного Л П візирного пристрою і геометрії шолома. Їх величини не повинні бути більші, ніж максимальні робочі азимутальні кути пристрою, який реалізує даний спосіб. Ця вимога викликана необхіднiстю гарантованого пеленгування додаткових випромінювачів на момент виходу із зони сканування випромінювачів І1 або І2. Вектор нормалі N2 (Фіг.3) до площини I1І3I4 не паралельний лінії візування. Аналогічно вектор нормалі N2 до площини І2I3I5 не паралельний лінії візування. При сполученні скануючого плоского пучка скануючих блоків із випромінювачами I 1, І2, І3 нашоломного візирного пристрою визначають пеленги на випромінювачі І1, І2, І3 і, у випадку відсутності пеленга на випромінювач І1 (при великих азимутальних кутах розвороту лінії візування вправо), відключають лінію живлення від випромінювача її і підключають її до випромінювача І5 та обчислюють пеленги на випромінювачі І2, І3, І5, а у випадку відсутності пеленга на випромінювач І2 (при великих азимутальних кутах розвороту лінії візування вліво) відключають лінію живлення від випромінювача І 2 і підключають її до випромінювача І4 та обчислюють пеленги на випромінювачі І1, І3, І4, далі по обчислених пеленгах визначають координати ЕЦВ кожного із запеленгованих випромінювачів і при наявності пеленгів на випромінювачі I1, І3, I4 переносять зображення з перерахуванням координат ЕЦВ запеленгованого випромінювача I4 в площину І1І2І3 шляхом математичного з використанням теорії обертання повороту площини І1І3І4 навколо прямої з розміщеними на ній випромінювачами І1, І3 на кут мінус П , а у випадку наявності пеленгів на випромінювачі І2, I3, І5 переносять зображення з перерахуванням координат ЕЦВ запеленгованого випромінювача І 5 в площину І1І2І3 шляхом математичного з використанням теорії обертання повороту площини І 2І3І5 навколо прямої з розміщеними на ній випромінювачами І2, із на кут мінус , після чого Л визначають, в залежності від групи запеленгованих випромінювачів, вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів І 1, І2, І3, або вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів І1, І3 та точку з перерахованими в площину І1І2І3 координатами ЕЦВ запеленгованого випромінювача І4, чи вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів І 2, I3, та точку з перерахованими в площину І1І2І3 координатами ЕЦВ запеленгованого випромінювача І 5, причому в кожному із трьох випадків обчислений вектор нормалі паралельний лінії візування, а при відсутності пеленга на випромінювач І5 (при підключеній до нього лінії живлення) відключають лінію живлення від випромінювача І5 і підключають її до випромінювача І1 та визначають вектор нормалі до площини І1І2І3, а у випадку відсутності пеленга на випромінювач І4 (при підключеній до нього лінії живлення) відключають лінію живлення від випромінювача І4 і підключають її до випромінювача І2. та визначають вектор нормалі до площини І1І2I3 і, в залежності від обчисленого вектора нормалі, визначають кути орієнтації лінії візування. Таким чином, в запропонованому способі виконується обчислення просторової орієнтації лінії візування при розміщенні випромінювачів нашоломного візирного пристрою в площинах І1І2І3, І1І3І4 або І2І3І5, в результаті чого діапазон визначення азимутальних кутів орієнтації лінії візування може бути розширений до значень ±120°. В даному способі, у випадках наявності інформації від додатково введених випромінювачів І4, I5, переносять зображення з перерахуванням координат ЕЦВ запеленгованого випромінювача U в площину І1І2І3 шляхом математичного, з використанням теорії обертання, повороту площини її І3І4 навколо прямої з розміщеними на ній випромінювачами І1, І3 на кут мінус П , або переносять зображення з перерахуванням координат ЕЦВ запеленгованого випромінювача І5 в площину І1І2І3 шляхом математичного, з використанням теорії обертання, повороту площини І2І3І5 навколо прямої з розміщеними на ній випромінювачами І 2, І3 на кут мінус . Для цього використовується матриця обертання на кут мінус П навколо прямої І1І3, для Л якої відомі напрямні косинуси або матриця обертання на кут мінус 5 П навколо прямої І2І3 з UA 99021 C2 5 10 15 20 25 30 35 40 45 50 55 60 відомими напрямними косинусами [Корн Г., Корн Т. Справочник по математике. Для научных работников и инженеров. - М.: Наука, 1974. - 830 с.]. В результаті приведених дій вектор нормалі до повернутої площини І 1І3I'4 або вектор нормалі до повернутої площини І 2І3I'5 і лінія візування паралельні і їх просторові положення не залежать від крену голови оператора, що дозволяє використати той же математичний апарат, що і при обчисленні координат лінії візування прототипу. При цьому точність визначення кутів орієнтації лінії візування в розширеному діапазоні практично така ж, як і у прототипі при використанні однієї площини розміщення випромінювачів. Вирішення поставленої задачі без використання математичних поворотів додаткових площин І1І3I4, І2І3I5 потребує врахування крену голови оператора при визначенні координат лінії візування, що призводить до значних похибок формування кутів цілевказування, які є неприйнятними для сучасних нашоломних систем цілевказування. Роботу запропонованого пристрою розглянемо на прикладі блок-схеми, наведеної на Фіг.1. Нашоломний візирний пристрій 1 побудований на основі групи з п'яти випромінювачів, жорстко пов'язаних з візиром, які розташовані в трьох площинах. Випромінювачі можуть бути виконані у вигляді, наприклад, точкових діодних випромінювачів. Візир являє собою оптичний коліматорний формувач, призначений для виводу в поле зору оператора зображення візирної мітки, наприклад, у вигляді перехрестя. Напруга живлення елементів формування візирної мітки надходить з першого виходу електронного блока на перший вхід нашоломного візирного пристрою. Візир, скануючі блоки 2 і 3 і електронний блок 4 по своїй побудові і функціональному призначенню відповідають блокам прототипу. Блок обчислень 6 може бути виконаний, наприклад, на мікропроцесорі типу ADSP2189. Комутатор може бути виконаний, наприклад, на основі двох ключів типу ADG436BK. При цьому виходи першого і другого скануючих блоків з'єднані відповідно з першим і другим входами електронного блока, перший вихід електронного блока з'єднаний з першим входом нашоломного візирного пристрою, другий вихід електронного блока з'єднаний з другим входом комутатора, перший вхід комутатора з'єднаний з першим виходом блока обчислень, вихід комутатора з'єднаний з другим входом нашоломного візирного пристрою, два оптико-електронні скануючі блоки оптично сполучені з нашоломним візирним пристроєм, а другий вихід блока обчислень є виходом пристрою. При сполученні скануючого плоского пучка скануючих блоків із випромінювачами нашоломного візирного пристрою в електронному блоці 4 обчислюються первинні складові NLM пеленгів, які відповідають положенням випромінювачів в просторі (у базовій системі координат) відносно скануючих блоків. В блоці обчислень 6 (Фіг.1) по значеннях NLM згідно з алгоритмом роботи (Фіг.9) визначають пеленги: - на активовані випромінювачі І1, І2, І3, якщо абсолютні значення азимутальних кутів розвороту нашоломного візирного пристрою (голови оператора) не перевищують 60°, при цьому сформована ознака Ц=1 (блок 7) і обробка інформації здійснюється підпрограмою (ПП) А123 (блок 19), структура якої подана на Фіг.10; - на активовані випромінювачі І2, I3, I5, якщо абсолютні значення азимутальних кутів розвороту вправо нашоломного візирного пристрою перевищують 60°, при цьому сформована ознака Ц=2 (блок 14) і обробка інформації здійснюється ПП А235 (блок 21), структура якої подана на Фіг.11; - на активовані випромінювачі І1, І3, 14, якщо абсолютні значення азимутальних кутів розвороту вліво нашоломного візирного пристрою перевищують 60°, при цьому сформована ознака Ц=3 (блок 11) і обробка інформації здійснюється ПП А134 (блок 23), структура якої подана на Фіг.12. При значенні ознаки Ц=0 (встановлюється в блоці 3) відсутня інформація (відсутні значення NLM) для групи із трьох випромінювачів і алгоритм працює в стані очікування. При наявності пеленгів на випромінювачі І1, І2, І3 визначають їх координати проекцій ЕЦВ (Фіг.10, блоки 1-3) та обчислюють (блок 4) коефіцієнти А, В, С рівняння площини І1І2І3. У випадку відсутності пеленга І1 (при великих азимутальних кутах повороту лінії візування вправо) з першого виходу блока обчислень 6 (Фіг.1) на перший вхід комутатора 5 надходить команда на відключення лінії живлення від випромінювача І1 і підключення її до випромінювача І5 (Фіг.9, блок 12). В цьому разі обчислюють пеленги на випромінювачі І 1, І3, І5 (Фіг.9, блок 17). У випадку відсутності пеленга І2 (при великих азимутальних кутах повороту лінії візування вліво) з першого виходу блока обчислень 6 на перший вхід комутатора 5 надходить команда на відключення лінії живлення від випромінювача І2 і підключення її до випромінювача І4 (Фіг.9, 6 UA 99021 C2 5 10 15 20 25 30 35 40 45 50 55 блок 9). В цьому разі обчислюють пеленги на випромінювачі І1, І3, І4 (Фіг.9, блок 17). Далі по обчислених пеленгах визначають координати ЕЦВ запеленгованих випромінювачів (Фіг.11, блоки 1-3 або Фіг.12, блоки 1-3) і перераховують (Фіг.12) обчислені координати ЕЦВ випромінювача І4 в площину І1І2І3 шляхом математичного повороту площини І1І3І4 навколо прямої з розміщеними на ній випромінювачами І1, І3 на кут мінус П , або перераховують (Фіг.11) обчислені координати ЕЦВ випромінювача І5 в площину І1І2І3 шляхом математичного повороту площини І2І3І5 навколо прямої з розміщеними на ній випромінювачами І2, І3 на кут мінус Л (Фіг.4), після чого обчислюють, в залежності від групи запеленгованих випромінювачів, вектор нормалі до площини І1І2І3 (Фіг.10, блок 4) або вектор нормалі до площини І1І3І4 (Фіг.12, блок 13), яка повернута на кут мінус П навколо прямої з розміщеними на ній випромінювачами І1, І3 чи вектор нормалі до площини І2І3І5 (Фіг.11, блок 13), яка повернута на кут мінус Л навколо прямої з розміщеними на ній випромінювачами І 2, І3, причому в кожному із трьох випадків кожний із обчислених векторів нормалі паралельний лінії візування. У випадку ж відсутності пеленга на випромінювач І5 при підключеній до нього лінії живлення, відключають лінію живлення від випромінювача І5 і підключають її до випромінювача І 1 та визначають вектор нормалі до площини І1І2І3, а у випадку відсутності пеленга на випромінювач І4 при підключеній до нього лінії живлення, відключають лінію живлення від випромінювача І 4 і підключають її до випромінювача І2. та визначають вектор нормалі до площини І1І2І3. Далі, в залежності від обчисленого вектора нормалі, визначають кути орієнтації лінії візування. Далі подано більш детально опис роботи алгоритму (Фіг.9-Фіг.12). У блоці 1 алгоритму (Фіг.9) записуються і зберігаються значення постійних величин, необхідних для роботи пристрою. У блоці 2 виконується введення складових NLM кутів візування від електронного блока. У блоці 4 виконується аналіз наявності інформації від випромінювача І3 при скануванні його скануючими блоками. В блоці 5 виконується аналіз наявності інформації від випромінювача І 2 при скануванні його скануючими блоками. У блоці 6 виконується аналіз наявності інформації від випромінювача I 1 при скануванні його скануючими блоками. У блоці 8 виконується аналіз наявності інформації від випромінювача I 1 при скануванні його скануючими блоками у випадку відсутності інформації від випромінювача І 2. В блоці 9 формується команда на відключення лінії живлення від випромінювача І 2 і підключення її до випромінювача І4. У блоці 10 виконується аналіз наявності інформації від випромінювача I 4 при скануванні його скануючими блоками. У блоці 12 формується команда на відключення лінії живлення від випромінювача I 1 і підключення її до випромінювача І5. У блоці 13 виконується аналіз наявності інформації від випромінювача І 5 при скануванні його скануючими блоками. У блоці 15 формується команда на відключення лінії живлення від випромінювача І 5 і підключення її до випромінювача І1, а також реалізується затримка на перемикання (гістерезис). У блоці 16 формується команда на відключення лінії живлення від випромінювача І 4 і підключення її до випромінювача І2, а також реалізується затримка на перемикання (гістерезис). У блоці 17 виконується обчислення пеленгів при різних групах активованих випромінювачів. У блоці 18 виконується аналіз наявності пеленгів від випромінювачів І1, І2, І3. У блоці 19 виконується обробка інформації по випромінювачах І1, І2, І3. У блоці 20 виконується аналіз наявності пеленгів від випромінювачів І2, І3, І5. У блоці 21 виконується обробка інформації по випромінювачах І2, І3, І5. У блоці 22 виконується аналіз наявності пеленгів від випромінювачів І1, І3, І4. У блоці 23 виконується обробка інформації по випромінювачах І1, І3, І4. У блоці 24 виконується обчислення кутів орієнтації лінії візування. У блоці 1 алгоритму (Фіг.10) виконується обчислення координат проекцій х i, zi випромінювачів І1, І2, І3. У блоці 2 виконується обчислення значень проекцій Δх 31, Δz32, Δх31, Δz32 випромінювачів І1, І2, І3. У блоці 3 виконується обчислення значень проекцій Δy31, Δy32 випромінювачів І1, І2, І3. У блоці 4 виконується обчислення коефіцієнтів А, В, С площини, яка задається рівнянням Ах+By+Cz=0. Дана площина проходить через початок координат - точку (0,0,0), яка співпадає з координатами ЕЦВ випромінювача І3. Крім того, площина має напрямні вектори R31, R32 , а 7 UA 99021 C2 5 10 15 коефіцієнти А, В і С обчислюються за формулами, які визначають рівняння площини в просторі [Бронштейн І.Н., Семендяев К.А. Справочник по математике. Для инженеров и учащихся втузов. - М.: Наука, 1965. - 608 с.]. Відзначимо, що коефіцієнти А, В, С є координатами вектора нормалі до площини Ах + Ву+ Cz=0. У блоці 1 алгоритму (Фіг.11) виконується обчислення координат проекцій x i, zi ЕЦВ випромінювачів І2, І3, І5. У блоці 2 виконується обчислення значень проекцій Δх 25 Δz25 Δх32, Δz32 випромінювачів І2, І3, І5. У блоці 3 виконується обчислення значень проекції Δy32 випромінювачів І2, І3. У блоці 4 виконується обчислення напрямних косинусів прямої L та елементів матриці обертання на кут мінус Л навколо прямої L. В блоках 5-11 відбувається визначення знаку вертикальної проекції Δy25 при першому проході після перемикання живлення з випромінювача І1 на випромінювач І5. У блоці 6 виконується обчислення модуля значення проекції Δy25. У блоці 8 виконуються операції по повороту площини І2І3І5 навколо прямої L при позитивному значенні проекції Δy25 і визначенні координат лінії візування y * , Z * * . У блоці 10 виконуються операції по повороту площини І2І3І5 навколо прямої L при негативному значенні проекції Δy25 і визначенні координат лінії візування y * , Z * * . 20 У блоці 11 виконуються операції по встановленню знаку Z (Z=+1 або Z=-1) проекції Δy25. Для цього порівнюються обчислені кути візування y * , Z * * (Z=+1) та y * , Z * * (Z=-1) з кутами візування y , Z , які одержані останніми до перемикання лінії живлення з випромінювача І 1 на випромінювач І5 і вибирається значення Z, для якого обчислені кути найбільш наближені до кутів y , Z . 25 30 У блоці 12 виконуються операції по обчисленню проекції Δy25 з встановленим знаком. У блоці 13 виконуються операції по повороту площини І 2І3І5 навколо прямої L шляхом повороту вектора U навколо прямої L. У блоці 14 виконуються операції по аналізу зміни знаку Z при переході Δy25 через нуль. При цьому відслідковується поведінка кутів візування , перед досягненням нульового y Z значення проекції Δy25 та вибирається той знак вказаної проекції після переходу її через нуль, який максимально близько відповідає знайденому характеру зміни кутів візування y , Z . В поданому на Фіг.12 алгоритмі виконуються операції по обчисленню коефіцієнтів А, В, С повернутої на кут мінус П площини І1І3І4 аналогічні операціям, наведеним на Фіг.11 при 35 40 обчисленні коефіцієнтів А, В, С повернутої на кут мінус Л площини І2І3І5. Таким чином, у порівнянні із прототипом, в запропонованому пристрої за рахунок введення додаткових площин розміщення випромінювачів діапазон визначення азимутальних кутів орієнтації лінії візування розширюється більше ніж в два рази. При цьому точність формування кутів цілевказування в розширеному діапазоні відповідає точності прототипу, що досягнуто за рахунок виключення впливу на них крену голови оператора, що підвищує ефективність застосування як самих нашоломних систем цілевказування, так і систем, які сполучуються з ними. ФОРМУЛА ВИНАХОДУ 45 50 55 1. Спосіб визначення кутів орієнтації лінії візування нашоломною системою цілевказування і індикації, яка побудована на основі двох оптико-електронних скануючих блоків, електронного блока і нашоломного візирного пристрою з трьома випромінювачами I 1, I2, І3, розміщеними на лицевому боці шолома у вигляді рівнобедреного, з основою I1I2, трикутника в площині I1I2І3, вектор нормалі до якої паралельний лінії візування, причому випромінювач I 2 розміщений в лівій, а I1 - в правій частинах лицевого боку шолома, що включає формування кожним скануючим блоком вузького вертикального миттєвого поля зору і сканування ним внутрішньокабінного простору, формування трьох послідовностей імпульсів струму для живлення трьох випромінювачів нашоломного візирного пристрою, випромінювання трьох послідовностей імпульсів інфрачервоного кольору при проходженні миттєвого поля зору скануючих блоків енергетичних центрів випромінювання (ЕЦВ) кожного випромінювача і формування первинних складових кутів цілевказування, який відрізняється тим, що в нашоломний візирний пристрій додатково вводять два випромінювачі І4,I5 і розміщують 8 UA 99021 C2 5 10 15 20 25 30 35 40 45 випромінювач І4 на правій, a I5 - на лівій по відношенню до лінії візування боках шолома, причому випромінювач І4 лежить в площині І1І3І4, яка повернута навколо прямої з розміщеними на ній випромінювачами І1, І3 відносно площини І1І2І3 на кут П і вектор нормалі до якої не паралельний лінії візування, а випромінювач І5 лежить в площині І2І3I5, яка повернута навколо прямої з розміщеними на ній випромінювачами І2, І3 відносно площини І1І2I3 на кут Л і вектор нормалі до якої не паралельний лінії візування, при цьому визначають пеленги на випромінювачі І1, І2, I3 і при відсутності пеленга на випромінювач І1 (при великих азимутальних кутах розвороту лінії візування вправо) відключають лінію живлення від випромінювача І1 і підключають її до випромінювача I5 та обчислюють пеленги на випромінювачі І2, І3, I5, а у випадку відсутності пеленга на випромінювач І2 (при великих азимутальних кутах розвороту лінії візування вліво) відключають лінію живлення від випромінювача І2 і підключають її до випромінювача І4 та обчислюють пеленги на випромінювачі І 1, І3, I4, далі по обчислених пеленгах визначають координати ЕЦВ кожного із запеленгованих випромінювачів і при наявності пеленгів на випромінювачі І1, І3, I4 переносять зображення з перерахуванням координат ЕЦВ запеленгованого випромінювача I4 в площину І1І2I3 шляхом математичного, з використанням теорії обертання, повороту площини І1І3I4 навколо прямої з розміщеними на ній випромінювачами І1, І3 на кут мінус П , а у випадку наявності пеленгів на випромінювачі І 2, І3, I5, переносять зображення з перерахуванням координат ЕЦВ запеленгованого випромінювача І 5 в площину І1,І2,I3 шляхом математичного, з використанням теорії обертання, повороту площини І2І3I5 навколо прямої з розміщеними на ній випромінювачами І 2, І3 на кут мінус Л , після чого визначають, в залежності від групи запеленгованих випромінювачів, вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів І 1, І2, I3, або вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів І1, I3 та точку з перерахованими в площину І1, І2, I3 координатами ЕЦВ запеленгованого випромінювача І4, чи вектор нормалі до площини, яка проходить через точки з обчисленими координатами ЕЦВ випромінювачів І2, І3 та точку з перерахованими в площину І1І2I3 координатами ЕЦВ запеленгованого випромінювача І 5, причому в кожному із трьох випадків кожний із обчислених векторів нормалі паралельний лінії візування, а при відсутності пеленга на випромінювач І5 при підключеній до нього лінії живлення, відключають лінію живлення від випромінювача І5 і підключають її до випромінювача І1 та визначають вектор нормалі до площини I1 І2 І3, а у випадку відсутності пеленга на випромінювач І4 при підключеній до нього лінії живлення, відключають лінію живлення від випромінювача І 4 і підключають її до випромінювача І2. та визначають вектор нормалі до площини І1І2I3 і, в залежності від обчисленого вектора нормалі, визначають кути орієнтації лінії візування. 2. Пристрій визначення кутів орієнтації лінії візування, що містить нашоломний візирний пристрій з трьома випромінювачами, перший і другий оптико-електронні скануючі блоки, що задають базову систему координат, і електронний блок, при цьому виходи першого і другого скануючих блоків з'єднані відповідно з першим і другим входами електронного блока, перший вихід електронного блока з'єднаний з першим входом нашоломного візирного пристрою, який відрізняється тим, що в нього додатково введені блок обчислень і комутатор, а в нашоломний візирний пристрій додатково введені два випромінювачі, при цьому другий вихід електронного блока з'єднаний з другим входом комутатора, перший вхід комутатора з'єднаний з першим виходом блока обчислень, вихід комутатора з'єднаний з другим входом нашоломного візирного пристрою, два оптико-електронні скануючі блоки оптично сполучені з нашоломним візирним пристроєм, а другий вихід блока обчислень є виходом пристрою. 9 UA 99021 C2 10 UA 99021 C2 11 UA 99021 C2 12 UA 99021 C2 13 UA 99021 C2 14 UA 99021 C2 15 UA 99021 C2 16 UA 99021 C2 17 UA 99021 C2 18 UA 99021 C2 19 UA 99021 C2 20 UA 99021 C2 21 UA 99021 C2 22 UA 99021 C2 23 UA 99021 C2 Комп’ютерна верстка А. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 24
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and a device for determination of orientation angles of sight line
Автори англійськоюCherniak Serhiy Ivanovych, Kadochnikov Serhii Mykhailovych, Zhuk Volodymyr Leonidovych, Plyta Oleksandr Andriiovych
Назва патенту російськоюСпособ определения углов ориентации линии визирования и устройство для его осуществления
Автори російськоюЧерняк Сергей Иванович, Кадочников Сергей Михайлович, Жук Владимир Леонидович, Плита Александр Андреевич
МПК / Мітки
МПК: F41G 3/22
Мітки: кутів, здійснення, спосіб, лінії, пристрій, орієнтації, визначення, візування
Код посилання
<a href="https://ua.patents.su/26-99021-sposib-viznachennya-kutiv-oriehntaci-lini-vizuvannya-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення кутів орієнтації лінії візування та пристрій для його здійснення</a>
Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30200
Опубліковано: 15.05.2003
Автори: Плита Олександр Андрійович, Беляєва Галина Григорівна, Черняк Сергій Іванович
МПК: G02B 23/00
Мітки: визначення, спосіб, кутів, нашоломною, системою, візування
Формула / Реферат:
Спосіб визначення кутів візування нашоломною системою візування, який полягає у визначенні кутових координат орієнтації в просторі осі візира, встановленого на рухомій основі, наприклад на шоломі оператора, при суміщенні перехрестя візира з ціллю, який відрізняється тим, що вимірюють величини швидкості кутового повороту відносно трьох взаємно перпендикулярних осей рухомої основи, а кути вертикального
Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30187
Опубліковано: 15.11.2000
Автори: Беляєва Галина Григорівна, Плита Олександр Андрійович, Черняк Сергій Іванович
МПК: G02B 23/00
Мітки: візування, визначення, нашоломною, кутів, системою, спосіб
Формула / Реферат:
Спосіб визначення кутів візування нашоломною системою візування, який полягає в визначенні кутових координат орієнтації в просторі вісі візиру, установленого на рухомій основі, та суміщенні перехрестя візиру з ціллю, який відрізняється тим, що вимірюють величину швидкості кутового розвороту рухомої основи відносно вертикальної вісі базової системи координат, суміщують контрольні та стабілізовані мітки в полі зору візиру, а координати...
Спосіб визначення кутів візування нашоломною системою візування
Номер патенту: 30191
Опубліковано: 15.11.2000
Автори: Плита Олександр Андрійович, Бузанов Віктор Іванович, Беляєва Галина Григорівна, Черняк Сергій Іванович
МПК: G02B 23/00
Мітки: системою, нашоломною, візування, кутів, спосіб, визначення
Формула / Реферат:
Спосіб визначення кутів візування нашоломною системою візування, який полягає у визначенні кутових координат орієнтації в просторі вісі візиру, встановленного на рухомій основі, при суміщенні перехрестя візиру з ціллю, який відрізняється тим, що додатково вимірюють параметри кутового розвороту відносно двох взаємноперпендикулярних вісей рухомої основи, суміщують контрольні та стабілізовані мітки у полі зору візиру, а кути азимутального jу та...
Спосіб автоматичної компенсації відхилення лінії візування прицілу гармати бронемашини і пристрій для його здійснення
Номер патенту: 49958
Опубліковано: 15.10.2002
Автори: Гордієнко Валентин Іванович, Фролов Леонід Андрійович, Ревякин Леонід Дмитрович, Глущенко Анатолій Романович, Хомченко Олексій Якович
МПК: F41G 3/02
Мітки: лінії, спосіб, автоматичної, компенсації, відхілення, пристрій, здійснення, гармати, прицілу, візування, бронемашини
Формула / Реферат:
1. Спосіб автоматичної компенсації відхилення лінії візування прицілу гармати бронемашини, який полягає в тому, що в канали наведення прицілу за висотою та напрямком вводять компенсаційні сигнали, пропорційні відхиленню лінії візування за висотою та напрямком, в протифазі по відношенню до напрямку руху відхилення, який відрізняється тим, що гармату приводять на певний кут і фіксують її положення на жорсткій опорі, вимикають приводи гармати та...
Спосіб визначення орієнтації осі візира і пристрій для його реалізації
Номер патенту: 47972
Опубліковано: 15.07.2004
Автори: Кадочніков Сергій Михайлович, Черняк Сергій Іванович, Ліпунова Валентина Григорівна
МПК: F41G 3/22
Мітки: визначення, спосіб, реалізації, візира, осі, пристрій, орієнтації
Формула / Реферат:
1. Спосіб визначення орієнтації осі візира, що включає сканування простору розміщення нашоломного вузла з n випромінюючими діодами плоскими оптичними віяловими променями, визначення первинних пеленгів на кожний з n випромінюючих діодів та положення n випромінюючих діодів у просторовій площині, яка проходить через реперні точки нашоломного вузла, в яких розміщені випромінюючі діоди, який відрізняється тим, що сканують просторову площину...
Попередній патент: Пристрій для розпилення аерозолю
Наступний патент: Газотурбінна установка для збідненого палива
Випадковий патент: Вузол переміщення полотна секційних воріт