Ручний зйомник фруктів
Номер патенту: 10702
Опубліковано: 25.12.1996
Автори: Ступак Надія Іванівна, Канішевський Станислав Михайлович, Петрушевський Іван Іванович
Формула / Реферат
1. Ручной съемник фруктов, содержащий полый держатель с размещенным на нем рабочим органом в виде чашеобразной воронки с У-образным вырезом на ее кромке и с прикрепленным к ней плодопроводом, имеющим гаситель скорости движения плода, отличающийся тем, что полый держатель выполнен в виде штанги из телескопически связанных трубок с возможностью перемещения закрепленного на ней рабочего органа и фиксации его посредством гибкой тяги, прикрепленной к верхней трубке штанги, перекинутой через блок средней трубки и помещенной свободным концом в плодоприемник, выполненный в виде сетчатой корзины, обод которой закреплен на поясном ремне, при этом плодопровод выполнен в виде прикрепленного к чашеобразной воронке рукава из мягкой нетянущейся сетки, нижняя часть которого помещена в сетчатую корзину, а гаситель скорости движения плода - в виде установленной на ободе этой корзины рамки, охватывающей рукав плодопровода и несущей каскадно-противоположно размещенные в ней амортизационные жгуты, причем на дне чашеобразной воронки установлен съемный счесыватель плодов в виде стойки с упругими аркообразными каскадно прикрепленными к ней зацепами.
2. Ручной съемник фруктов по п. 1, отличающийся тем, что предусмотрен набор съемных чашеобразных воронок, имеющих различную конфигурацию вырезов и зубьев ее кромок.
Текст
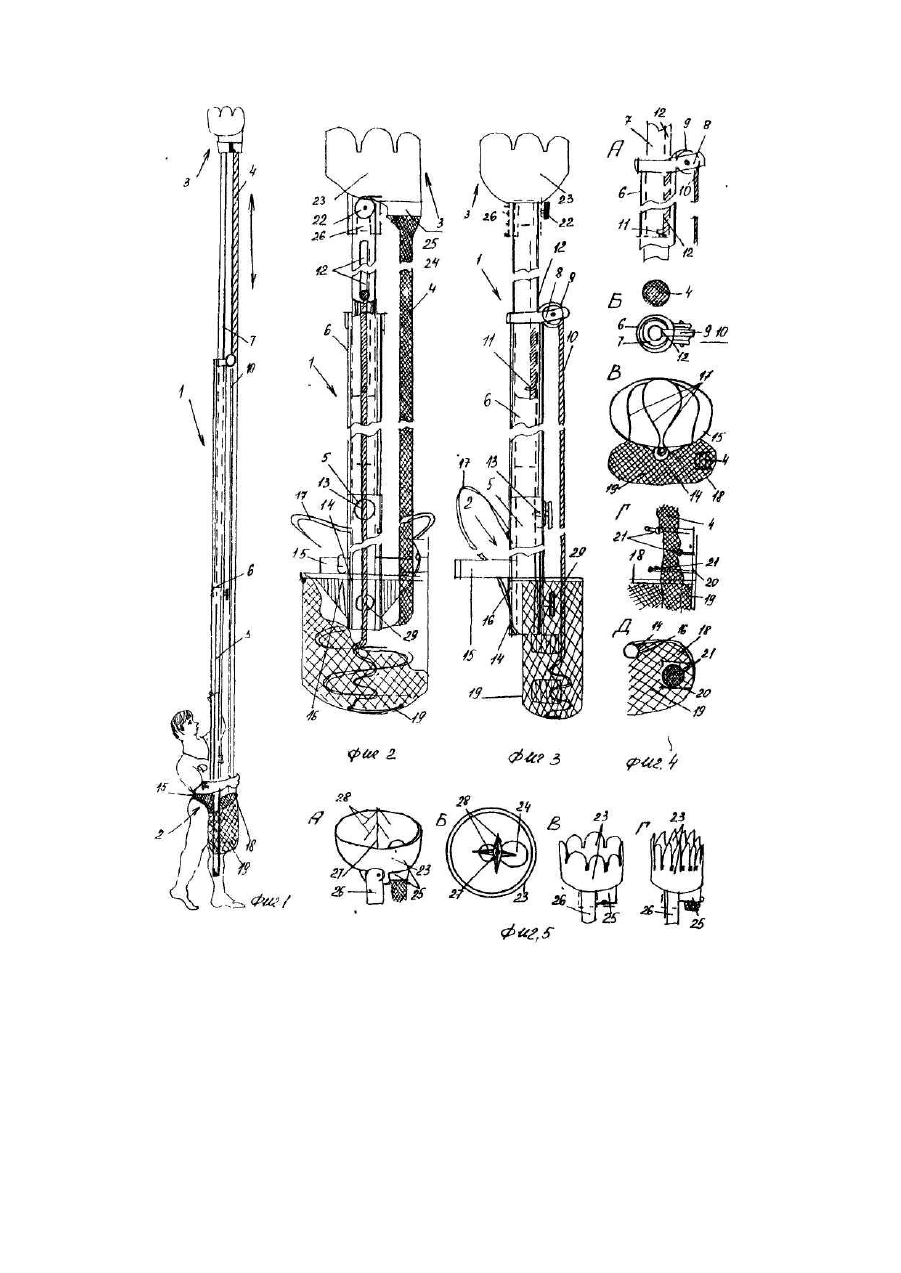
Предполагаемое изобретение относится к сельскохозяйственному машиностроению, в частности, к устройствам для ручного сбора фруктов. Наиболее близким по технической сущности является ручной съемник фруктов, содержащий жесткий полый держатель-плодопровод и размещенный в нем рабочий орган с У-образным вырезом, выполненный в виде чашеобразной воронки, на верхней кромке которой выполнен У-образный вырез, над которым шарнирно закреплена собачка в виде снабженного контргрузом горизонтального двуплечего рычага, одно плечо которого расположено с перекрытием У-образного выреза, а другое является опорным, при этом полый держатель плодо-провод своей верхней частью сопряжен с нижним отверстием чашеобразной воронки и имеет синусоидальную форму [1]. Недостаток прототипа в том, что держатель-плодопровод этого устройства выполнен жестким, что приводит к травмированию подающих в его канале плодов, снижению их товарного вида и качества. Придание этому плодопроводу S-образной формы не устраняет этого недостатка, а при сборе плодов на высокорослых деревьях - даже усугубляет его, так как при смене направления падения плода возникают центробежные силы, прижимающие и ударяющие плод о противоположные стенки канала. К тому же, придание плодоводу жесткости, что необходимо по замыслу изобретения, ибо он же является держателем, приводит к утяжелению устройства, которым затруднительно оперировать при обработке высокорослых деревьев Все это приводит к травмированию плодов, снижению их товарного вида и качества, а также к недостатку в работе и снижению производительности труда при сборке урожая. В основу изобретения поставлена задача усовершенствования ручного съемника фруктов, путем применения мягкого и легкого плодопровода в виде сетчатого р укава, состыкованного сверху с рабочим органом, а снизу - с приемной корзиной, закрепленной на поясе работника и держателя переменной длины в виде телескопической штанги, управляемой работником посредством гибкой тяги. Все это призвано обеспечить сохранение товарного вида снимаемых плодов и их качества, а также повысить удобства в работе и производительность труда работника. Поставленная задача решена тем, что в ручном съемнике фруктов, содержащем полый держатель с установленным на нем рабочим органом в виде чашеобразной воронки с У-образным вырезом на ее кромке и с прикрепленным к ней плодопроводом, имеющим гаситель скорости движения плода, согласно предполагаемому изобретению, полый держатель выполнен в виде штанги из телескопически связанных трубок с возможностью перемещения рабочего органа и фиксации его посредством гибкой тяги, прикрепленной к нему, перекинутой через опорный блок штанги и помещенной свободным концом в плодоприемник, выполненный в виде мягкой корзинки, обод которой закреплен на поясном ремне, при этом плодопровод выполнен в виде прикрепленного к чашеобразной воронке рукава из мягкой нетянущейся сетки, нижняя часть которого помещена в корзину плодо-приемника, а гаситель скорости движения плода в виде установленной на ободе этой корзины рамки, охватывающей рукав плодопровода и несущей каскаднопротивопо-ложно размещенные в ней амортизационные жгуты, причем на дне чашеобразной воронки установлен съемный счесыватель плодов в виде стойки с упругими аркообразнокрестовидными каскадноприкрепленными к ней зацепами. Технический результат, достигаемый от использования совокупности отличительных признаков предложенного устройства, заключается в том, что с применением телескопического держателя, составные части которого связаны с гибкой тягой, а также средств фиксации штанги-держателя и использования приемника плодов - накопительной корзины удалось достичь повышенной маневренности рабочего органа плодосъемника среди ветвей деревьев, по всем направлениям обеспечить быстроту и точность захвата плодов, снятия их и накопления для транспортировки, т.е. повысить удобство в работе и производительность труда, а мягкий гибкий плодопровод с гасителем скорости движения плода дал возможность сохранить каждый плод, обеспечить ему должный товарный вид. При этом повышен ассортимент плодов, снятие которых стало возможным в силу того, что наряду с откручиванием плодоножек появилась возможность "счесывания" плодов с помощью примененных крестообразных зацепов. Сущность предлагаемого изобретения поясняется чертежом, где на фиг.1 дан общий вид ручного съемника фруктов в действии; на фиг.2 - то же, увеличено и с разрывами, вид спереди; на фиг.3 - то же, вид сбоку; на фиг.4 - составные элементы: А - опорный ролик с гибкой тягой; Б - то же в поперечном разрезе, В поясной и грудной ремни и приемник плодов - корзина, Г - гаситель скорости, движения плода, Д - то же, вид сверху; на фиг.5 - рабочий орган плодосъемника: А - в аксонометрии со сче-сывателем. Б - то же, вид сверху, В - чашеобразная воронка с фигурной кррмкой, Г -то же, с заостренными зубцами. Ручной съемник фруктов содержит держатель в виде штанги 1 из телескопически связанных между собой трубок и средством фиксации 2 держателя, рабочий орган 3 с плодопроводом 4. Штанга имеет трубчатую основу 5 или нижнюю трубку, в канал которой помещена с возможностью фиксации телескопическая пара из средней 6 и верхней 7 трубок, которые совместно с нижней трубкой 5 создают тройной телескоп. Сверху средней трубки закреплена проушина 8, в которой помещен опорный блок (ролик) 9, через который перекинута гибкая тяга 10, одним концом закрепленная на нижнем торце верхней 7 трубки в точке 11. а другой конец ее свободно сниспадает (стекает вниз). Для прохождения гибкой тяги между прилегающими поверхностями средней б трубки и верхней 7 тр убки на поверхности последней выполнен паз 12 (либо продольная прорезь). Снизу средняя трубка закреплена зажимным винтом 13 для фиксации ее на разной высоте. Этот винт ввинчен в резьбовое отверстие, выполненное на верхней части нижней трубки (5). Нижний торец этой тр убки помещен в обойму 14, закрепленную на поясном ремне 15, составляющем основу средства фиксации (2). Для прикрепления этой обоймы к поясу применена жесткая косынка 16, закрепленная на нем. Имеется также наплечно-грудной ремень 17, охватывающий плечи и грудь работника и прикрепленный спереди к верхней части обоймы (14), а сзади - к поясу (15). Спереди пояса по верхнему краю косынки (16) закреплен овальный обод 18, составляющий основу корзины 19, образуемой подвешенной к нему капроновой сеткой. Сбоку слева на этом ободе (18) закреплен амортизатор или гаситель скорости их движения имеющий рамку 20, на которой по бокам рукава плодопровода закреплены три резиновых жгута 21 (резинки). Сверху телескопической штанги 1 насажен и закреплен зажимным винтом 22 сменный сниматель рабочий орган (3), различные варианты, которого представлены на фиг.5. Это чашеобразная воронка (чаша) 23 с дном, имеющим уклон в сторону выходного отверстия* 24, к штуцер у 25 которого прикреплен рукав плодопровода 4. С внешней стороны дна прикреплен палец 26 для соединения с верхним торцом верхней 7 трубки, на котором в резьбовое отверстие ввинчен зажимной винт (22). Вариант А и Б фиг.5, имеет стойку 27, закрепленную на дне "чаши" (23), а на ней закреплена "елочка" -отрезки резиновой трубки 28, втянутые в отверстия, выполненные в стойке, взаимно перпендикулярно на разной высоте от дна и с наклоном их концов вниз - к боковой части дна чаши (см.фиг.5). Рукав плодопровода -это шланг, выполненный из нетянущей эластичной сетки, соединенной сверху со штуцером (25), а снизу свободно опущенный на дно корзины (19). Сюда же опущен и свободный конец гибкой тяги (10). Перед входом в корзину рукав плодопровода (4) пропущен через рамку (20) - он проходит между резиновыми жгутами (21), образующими между собой растягивающуюся щель, обуславливающую га шение скоростнопадающего плода в силу растягивания жгутов (21). Вся система и в частности, нижняя часть нижней трубы (основы) фиксируется в обойме (14) зажимным винтом 29. Пользуются съемником фруктов следующим образом. Работник одевает пояс 15 и ремень 17 так, что косынка 16 с обоймой 14 находится у него спереди и опирается на живот и бедра. Затем он устанавливает высоту съема плодов сначала на нижнем ярусе деревьев. Для этого он вводит телескопические трубы 6 и 7 во внутрь нижней трубы (основы) 5 и ставит штангу 1 перед собой, вводя ее основание в обойму 14 и зажимает ее винтом 29. Он готов к работе. Удерживая левой рукой штангу 1 и направляя ее к плодам, правой рукой он захватывает гибкую тягу 10 и возвратно-поступательными движениями с потягиванием тяги вниз и попусканием ее он манипулирует снимателем - рабочим органом 3 - подводит его чашу 23 под плоды и резкими движениями, короткими рывками за тягу вниз, подает чашу вверх и срывает или точнее стряхивает плоды. Плоды отрываются в силу толчков и вибрации, а иногда проворота чаши и падают на ее дно, скатываются по его наклону, попадают последовательно в выходное отверстие 24 и по рукаву плодопровода устремляется вниз в сторону корзины 19. Падение плода тормозится, во-первых, стенками рукава - его сеткой, так как просвет меньше диаметра плода. Однако этого недостаточно. У входа в корзину плод попадает в ту часть рукава, которая проходит через рамку 20 и задерживается там, попадая между резиновыми жгутами 21. Пройдя этот амортизатор, плоды теряют скорость и падают на дно сетки корзины уже без риска резкого удара и повреждения. Если в чашу попадает сразу несколько плодов, то они последовательно пропускаются через выходное отверстие 24, для чего чаша 23 встряхивается - работник натягивает и отпускает гибкую тягу 10, которая поднимает чашу, а опускается она под действием гравитации. Попадающие в рукав 4, плоды накапливаются на дне корзины (19), а затем их перекладывают в тару. Если плоды не поддаются встряхиванию, то применяют другую ча шу, например с "елочкой" 27, 28 (см.фиг.5). Чашу устанавливают на торец трубки 7, закрепляют винтом 22, а на штуцер 25 надевают рукав 4 плодовода и действуют аналогичным образом. Короткими движениями тяги 10 вниз и попусканием ее поднимают и опускают чашу 23, а вместе с ней и наклоненные вниз трубки 28. При движении вверх эти гибкие трубки прижимаются к стойке 27, свободно проходя между плодами и ветвями. При падении чаши и стойки вниз они раскрываются, захватывают плоды, срывая их с веток. Такими частыми движениями плоды как бы соскабливают или счесывают с веток и они попадают в выходное отверстие чаши и далее - в корзину, а с корзины в тару. На верхних яруса х деревьев плоды снимают удлиненным держателем. Для этого раздвигают телескоп штанги 1 - поднимают на требуемую высоту среднюю трубк у б, для чего освобождают зажим винта 13, выдвигают ее вверх и вновь завинчивают этот винт. Устанавливают штангу 1 в обойму 14, завинчивают винт 29 и действуют как и прежде. Для того, чтобы не снимая штангу обходить ветви дерева и подводить затем рабочий орган под плоды, верхнюю тр убку 7 опускают вниз до предела. Если и это не обеспечивает перемещение съемника по горизонтали, то тогда опускают всю верхнюю часть штанги 1 вниз, освободив ее винтом 29, а затем вновь подняв ее, закрепляют ввинчиванием этого винта. Так удается обходить препятствия без трудновыполнимой и неудобной операции снятия штанги или наклона ее и удержания на весу. Преимуществом предложенного устройства по сравнению с прототипом является то, что в связи с применением раздвижного управляемого по высоте держателя рабочего органа съемника фруктов со средством крепления его на туловище работника, а также благодаря применению мягкого плодовода с гасителем скорости движения плода, удалось повысить маневренность устройства вокруг обрабатываемого дерева и на различных ярусах его высоты обеспечить удобство в работе и более высокую производительность труда при сохранении целостности плодов, их товарного вида и качества. Использование разных вариантов съемных рабочих органов дало возможность надежнее снимать плоды и расширить ассортимент их в зависимости от породы дерева. Полагаем, что предложенный съемник фруктов послужит облегчению труда садовода и сохранению качества урожая, особенно при высокорослых деревьях. Ожидается, что он найдет применение при сборе не только яблок и груш, но и других фр уктов, а также косточковых - персиков, слив, абрикосов, вишен и т.п.
ДивитисяДодаткова інформація
Назва патенту англійськоюHand fruit pickup
Автори англійськоюKanishevskyi Stanislav Mykhailovych, Petrushevskyi Ivan Ivanovych
Назва патенту російськоюРучной съемник фруктов
Автори російськоюКанишевский Станислав Михайлович, Петрушевский Иван Иванович
МПК / Мітки
МПК: A01D 46/24
Мітки: зйомник, ручний, фруктів
Код посилання
<a href="https://ua.patents.su/3-10702-ruchnijj-zjjomnik-fruktiv.html" target="_blank" rel="follow" title="База патентів України">Ручний зйомник фруктів</a>
Машина для різання овочів і фруктів
Номер патенту: 6141
Опубліковано: 29.12.1994
Автори: Кучеренко Володимир Миколайович, Сапожнік Давид Йосифович, Гімборг Володимир Михайлович, Панасенко Ігор Миколайович, Канєвський Володимир Борисович
МПК: A23N 15/00
Мітки: фруктів, овочів, різання, машина
Формула / Реферат:
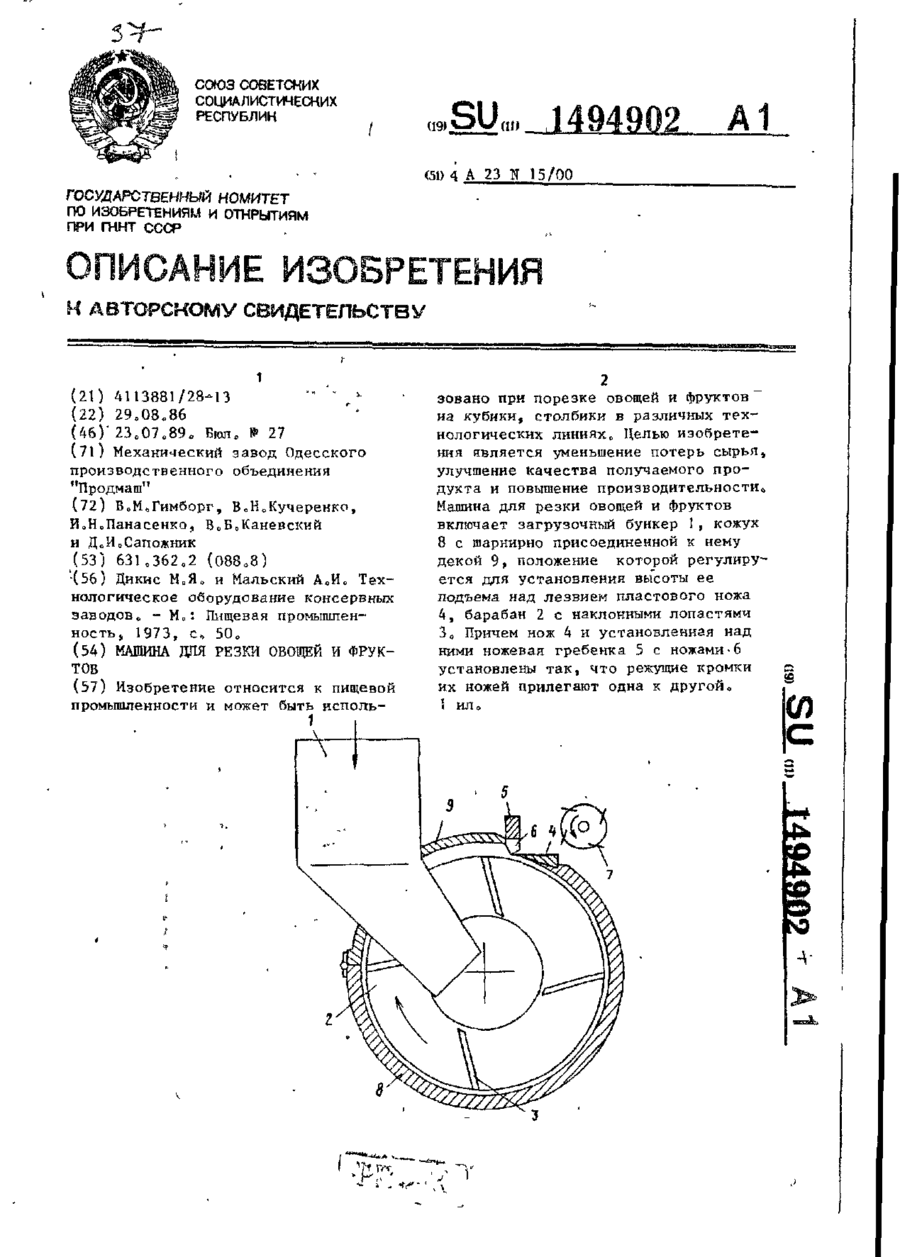
Машина для резки овощей и фруктов, содержащая загрузочный бункер, горизонтальный барабан с отводящим и подводящим отверстиями и укрепленными внутри него лопастями и расположенный снаружи, у отводящего отверстия режущий орган, состоящий из неподвижно укрепленных пластового ножа и ножевой гребенки продольной резки, и ножей поперечной резки, отличающаяся тем, что, с целью уменьшения потерь сырья, улучшения качества получаемого продукта и...
Ручний пристрій для клепки розкаткою

Номер патенту: 9473
Опубліковано: 30.09.1996
Автори: Коваленко Микола Володимирович, Жуков Вячеслав Миколайович, Корольков Юрій Акимович, Жура Валерій Михайлович
МПК: B21J 15/00
Мітки: ручний, розкаткою, клепки, пристрій
Формула / Реферат:
1. Ручное устройство для клепки раскаткой, содержащее соосно смонтированные в корпусе поддержку и связанную с приводом вращения раскатнуто головку с прижимом пакета соединяемых деталей и узлом ориентирования раскаткой головки относительно стержня заклепки, выполненным в виде смонтированных на прижиме поворотного двуплечего рычага и упорного элемента с угловым вырезом под стержень заклепки, установленного с возможностью взаимодействия с...
Ручний гідравлічний різак
Номер патенту: 2818
Опубліковано: 26.12.1994
Автори: Грошин Георгій Петрович, Якимчук Володимир Михайлович, Обламський Юрій Олексійович, Корзінкін Сергій Дмитрович, Полін Володимир Володимирович, Єгоньян Павло Григорович
МПК: B26D 5/02
Мітки: гідравлічний, різак, ручний
Формула / Реферат:
1. Ручной гидравлический резак, содержащий корпус, в расточках которого установлен силовой гидроцилимдр, включающий поршень со штоком, и плунжерный насос, гидравлически сообщаемый с силовым гидроцилиндром посредством клапанного узла, включающего всасывающий и нагнетающий клапаны, емкость с рабочей жидкостью, подвижную и неподвижную рукоятки, приводящие в действие плунжерный насос, режущий механизм, включающий нож клиновидной формы и...
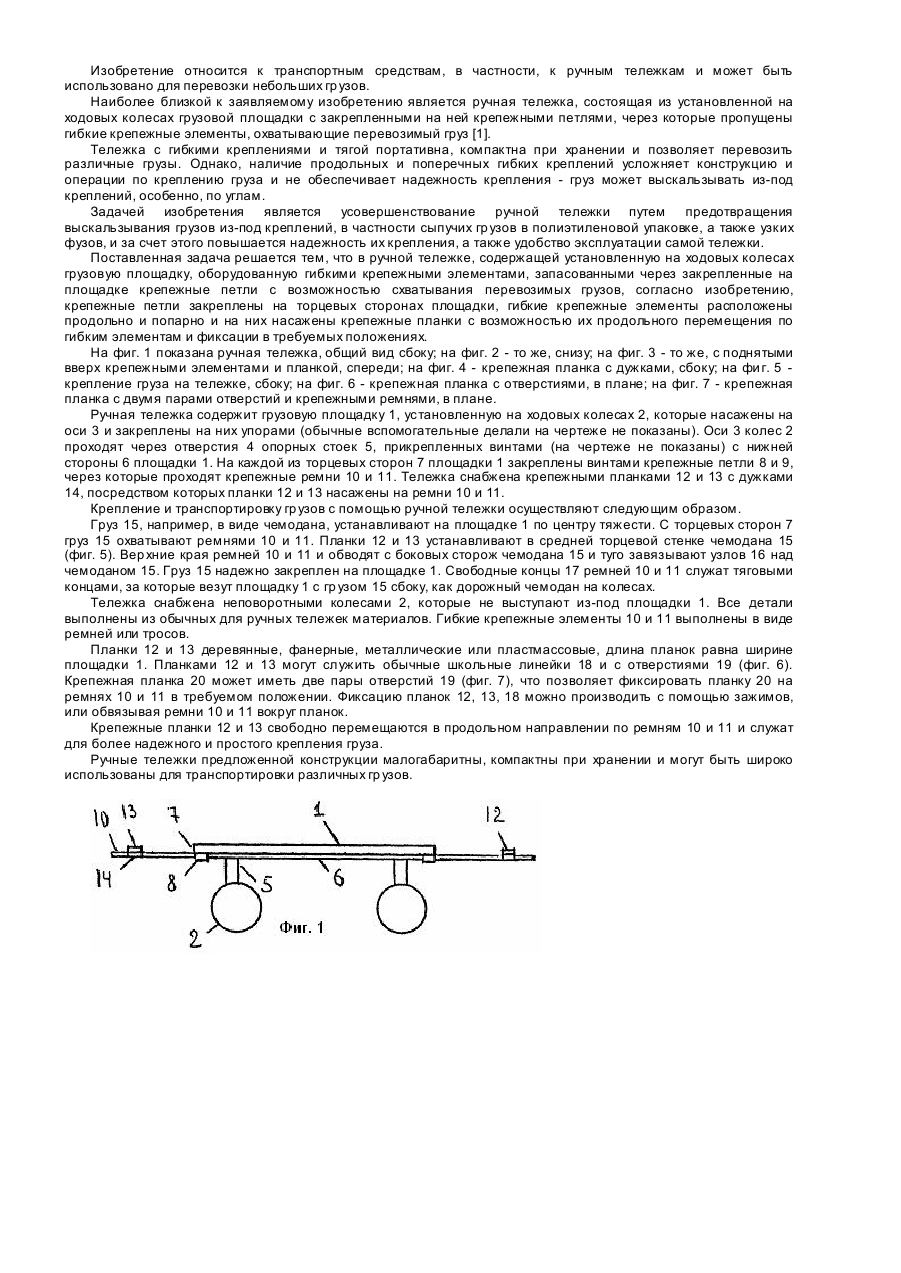
Ручний візок
Номер патенту: 1704
Опубліковано: 25.10.1994
Автор: Кириченко Станіслав Михайлович
МПК: B62B 3/04
Формула / Реферат:
Ручная тележка, содержащая установленную на ходовых колесах грузовую площадку, оборудованную гибкими крепежными элементами, запасованными через закрепленные на площадке крепежные петли с возможностью схватывания перевозимых грузов, отличающаяся тем, что крепежные петли закреплены на торцевых сторонах площадки, гибкие крепежные элементы расположёны продольно и попарно, и на них насажены крепежные планки с возможностью их продольного...
Ручний розкачуваний пристрій

Номер патенту: 9474
Опубліковано: 30.09.1996
Автори: Корольков Юрій Акимович, Жура Валерій Михайлович, Жуков Вячеслав Миколайович, Коваленко Микола Володимирович
МПК: B21J 15/00
Мітки: розкачуваний, ручний, пристрій
Формула / Реферат:
І. Ручное раскатное устройство для клепки, содержащее смонтированные в корпусе связанную с приводом раскатную головку с прижимом пакета и элементом ориентирования обжимки раскаткой головки, а также размещенную соосно с раскатной головкой поддержку, отличающееся тем, что, с целью повышения надежности работы устройства и качества клепки, оно снабжено приводом для поддержки, выполненным в виде основного силового цилиндра, расположенного на...
Попередній патент: Спосіб зміни функціонального стану організму при здійсненні циклічних тренуючих рухів з використанням біологічного зворотнього зв’язку та система для його здійснення
Наступний патент: Сировиготовлювач
Випадковий патент: Горизонтальна цистерна для зберігання та транспортування харчових рідин