Система стабілізації безпілотного літального апарата
Номер патенту: 11582
Опубліковано: 16.01.2006
Автори: Амелін Сергій Вікторович, Бандура Іван Миколайович, Симонов Володимир Федорович, Антошик Вікторія Миколаївна


Формула / Реферат
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний з виходом датчика кута тангажа і порівнювальним пристроєм.
2. Система стабілізації безпілотного літального апарата по п. 1, яка відрізняється тим, що обчислювач містить послідовно з'єднані блок вибору нелінійності, перший блок управління, другий суматор і блок формування управляючих сингалів, між другим виходом блока вибору нелінійності і другим входом другого суматора підключений другий блок управління.
3. Система стабілізації безпілотного літального апарата по п. 2, яка відрізняється тим, що фільтр встановлений в ланцюгу зворотного зв'язку по куту тангажа та містить послідовно з'єднані компаратор, елемент затримки, тригер, електронний ключ, обмежувач рівня сигналу та третій суматор.
Текст
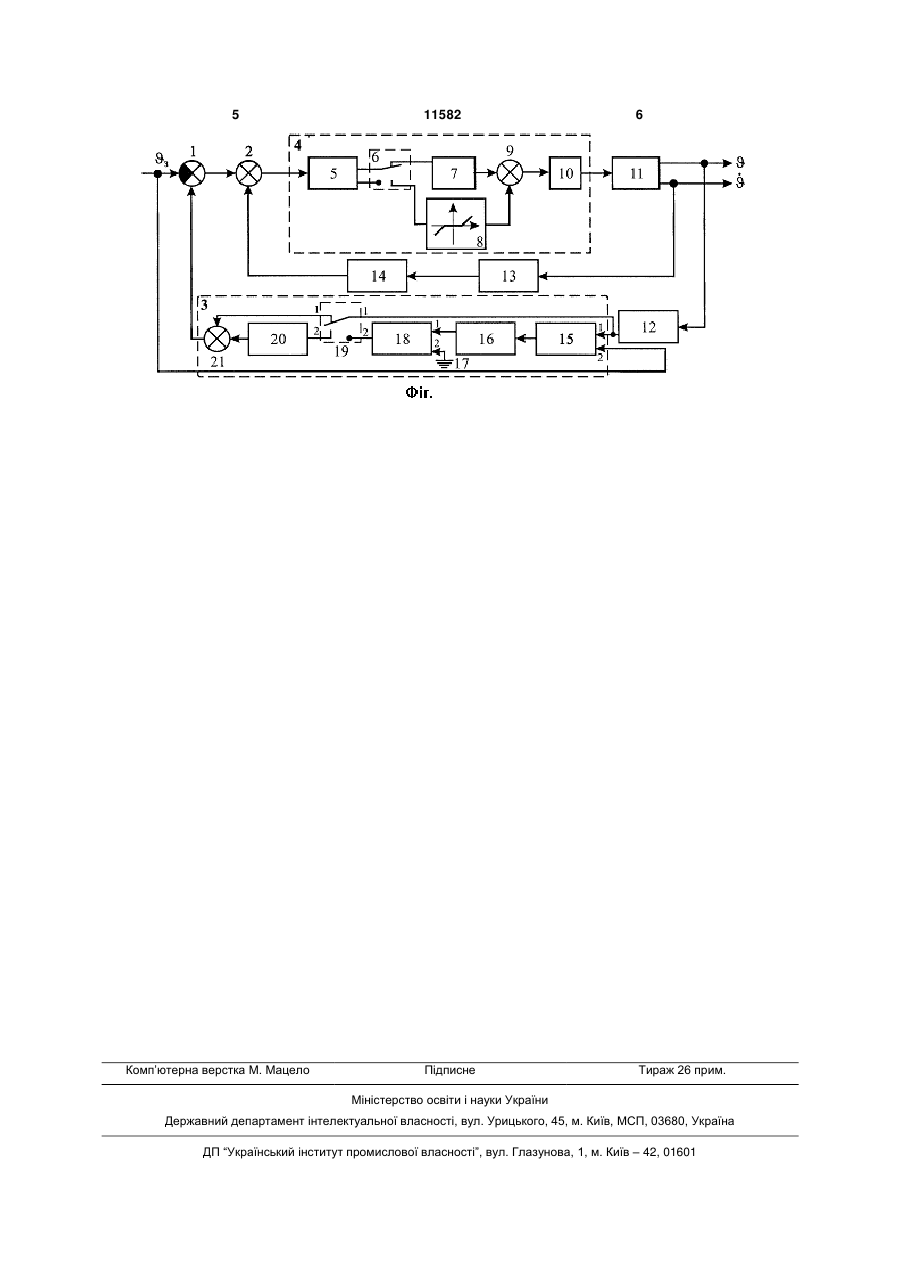
1. Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, суматор, підсилювач, рульовий привід та датчики кута тангажа та кутової швидкості тангажа, яка відрізняється тим, що в неї введено обчислювач, з'єднаний з виходом суматора та входом рульового приводу об'єкта управління, і фільтр, з'єднаний (11) - кутова швидкість тангажа. Недоліком цієї системи є те, що управління здійснюється в припущенні того, що швидкість польоту є постійною. Крім того, при виконанні літальним апаратом еволюцій під час польоту або виконання маневрів управління здійснюється з недостатньою точністю та швидкістю, що обумовлено складністю швидкого вибору коефіцієнтів закону управління. Задачею корисної моделі є підвищення якості перехідних процесів, підвищення швидкості, точності управління під час польоту та виконання маневрів. Рішення поставленої задачі досягається тим, що в систему стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, перший суматор, підсилювач, рульовий привід та UA . z (19) ту тангажа та кутовій швидкості тангажа відповідно; 11582 З 3 11582 4 датчики кута тангажа і кутової швидкості тангажа, затримки 16, який, в свою чергу з'єднаний з вхозгідно з корисною моделлю введено обчислювач, дом 1 тригера 18. Вхід 2 тригера 18 з'єднаний з з'єднаний з виходом першого суматора та входом корпусом літального апарата 17. Вихід тригера 18 рульового приводу об'єкта управління і фільтр, з'єднаний з входом 2 електронного ключа 19 та з'єднаний з виходом датчика кута тангажа і порівкерує його роботою. Електронний ключ 19 має два нювальним пристроєм. Крім того, фільтр, встановвиходи: 1 - подає сигнал з датчика кута 12 на сулений в ланцюгу зворотного зв'язку по куту тангаматор 21 у незміненому стані, 2 - подає сигнал з жа та містить послідовно з'єднані компаратор, датчика кута 12 на суматор 21 через обмежувач елемент затримки, тригер, електронний ключ, обрівня сигналу 20. Вихід суматора 21 з'єднано з межувач рівня сигналу та третій суматор. Крім порівнювальним пристроєм 1. того, обчислювач містить послідовно з'єднані блок Система стабілізації безпілотного літального вибору нелінійності, перший блок управління, друапарата за кутом тангажа працює таким чином: під гий суматор і блок формування управляючих сигчас польоту на вхід порівнювального пристрою 1 налів; між другим виходом блока вибору нелінійподається сигнал про задане значення кута танганості і другим входом другого суматора жа З, яке порівнюється з дійсним значенням кута підключений другий блок управління. тангажа . Якщо між цими сигналами є різниця, то Для забезпечення точності в закон керування сигнал поступає на суматор 2, який також приймає введена пропорційна куту тангажа складова. У . сигнал про кутову швидкість тангажа . Суматор передаточну функцію ЛА входить інтегруюча ланка, тому статична помилка буде дорівнювати нулю 2 видає сигнал на блок вибору нелінійності 5, який, і введення в закон керування інтегруючої складов свою чергу, в залежності від програми польоту вої не потрібно. Для забезпечення стійкості систета рівня сигналу, вибирає один з блоків управління ми керування і кращої якості перехідного процесу (7, 8), перемикаючи електронний ключ 6. Сигнал з в закон керування введена диференційна складоблока 2 або блока 8 передається на суматор 9, а ва. далі - на блок формування управляючих сигналів Завдяки цьому при виконанні літальним апа10, який подає сигнали управління на рульовий ратом маневрів зникає необхідність проводити привід об'єкта управління 11. Сигнал про кутову перерахунок коефіцієнтів закону управління. Обшвидкість тангажа передається з датчика кутової числювач вибирає їх значення з існуючого стандашвидкості 13 на підсилювач 14, а далі - на суматор ртного набору алгоритмів управління в залежності 2 для забезпечення демпфірування пружних коливід програми польоту. Крім того, потрібна точність вань корпуса літального апарата під час польоту. стабілізації кута тангажа досягається введенням у Сигнал про діюче значення кута тангажа поступає двоконтурну систему фільтра. з датчика кута 12, на вхід 1 електронного ключа 19 Сутність корисної моделі пояснюється кресі на вхід фільтра 3, тобто на вхід 1 компаратора ленням, де на Фіг. зображена блок-схема запропо15. На вхід 2 компаратора 15 подається сигнал нованої системи стабілізації. про задане значення кута тангажа ЛА. Якщо сигСистема стабілізації безпілотного літального нали на входах 1 та 2 мають невелику різницю, то апарата за кутом тангажа містить: порівнювальний на вхід 1 тригера 18 через елемент затримки 16 пристрій 1, що має електричний зв'язок з першим пройде сигнал "0" та тригер буде зачиненим і елесуматором 2, фільтр 3, обчислювач 4, вихід сумактронний ключ 19 залишиться в положенні 1. В тора 2 з'єднано з блоком вибору нелінійності 5, іншому випадку на тригер 18 пройде сигнал "1", який входить до складу обчислювача 4. Блок витригер переключиться в протилежний стан, перебору нелінійності 5 з'єднаний з електронним клюмикаючи електронний ключ 19 в положення 2, почем 6, виходи якого з'єднані з першим блоком даючи сигнал на вхід обмежувача рівня сигналу управління 7 та другим блоком управління 8, ви20, який масштабує дійсне значення кута тангажа ходи яких з'єднані через другий суматор 9 з блодо порядку заданого значення і подає його на суком формування управляючих сигналів 10, вихід матор 21, вихід якого з'єднаний з порівнювальним якого підключений до рульового привода об'єкта пристроєм 1, який видає різницю між діючим за управління 11, кутове положення якого вимірюєтьзаданим значенням кута тангажа, тобто сигнал ся за допомогою датчика кута тангажа 12 і датчика похибки. кутової швидкості 13, вихід якого через підсилювач Таким чином, введення в двоконтурну систему 14 підключений до суматора 2. Датчик кута 12 має аналогового обчислювача та фільтра суттєво піддва виходи: 1 - з'єднаний з входом 1 електронного вищує якість перехідних процесів, швидкодію сисключа 19, 2 - з'єднаний з входом 1 компаратора теми, точність управління під час польоту та вико15. На вхід 2 компаратора 15 поступає сигнал про нання маневрів. задане значення кута тангажа об'єкта управління 11 З. Вихід компаратора 15 з'єднано з елементом 5 Комп’ютерна верстка М. Мацело 11582 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюStabilization system of unmanned aircraft
Автори англійськоюSymonov Volodymyr Fedorovych, Bandura Ivan Mykolaiovych, Amelin Serhii Viktorovych
Назва патенту російськоюСистема стабилизации беспилотного летательного аппарата
Автори російськоюСимонов Владимир Федорович, Бандура Иван Николаевич, Амелин Сергей Викторович
МПК / Мітки
МПК: G05D 1/03, B64C 13/00
Мітки: стабілізації, літального, система, апарата, безпілотного
Код посилання
<a href="https://ua.patents.su/3-11582-sistema-stabilizaci-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації безпілотного літального апарата</a>
Система стабілізації безпілотного літального апарата

Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Величко Надія Вікторівна, Бандура Іван Миколайович
МПК: B64C 13/00, G05D 1/03
Мітки: стабілізації, апарата, літального, система, безпілотного
Формула / Реферат:
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Система керування двигуновою установкою літального апарата
Номер патенту: 61817
Опубліковано: 17.11.2003
Автори: Цехмейстер Олена Олексіївна, Лазоркін Юрій Юрійович, Кулік Анатолій Степанович, Бандура Іван Миколайович, Дигало Оксана Миколаївна
МПК: B64D 31/00
Мітки: апарата, установкою, система, двигуновою, літального, керування
Формула / Реферат:
Система керування двигуновою установкою літального апарата, що містить датчик частоти обертання ротора двигуна, електричний привід паливного агрегату, з'єднаний з паливним агрегатом, яка відрізняється тим, що в неї введені датчик тиску повітря за компресором, послідовно з'єднаний з блоком регулювань точності датчика тиску, датчик температури повітря за вентилятором, послідовно з'єднаний із блоком регулювань точності датчика температури, блок...
Система протиобледеніння літального апарата
Номер патенту: 50674
Опубліковано: 15.10.2002
Автори: Чечуй Олександр Вікторович, Шилова Тетяна Вікторівна, Кас'ян Ольга Викторівна, Жихарев Володимир Якович, Торчило Віталій Микитович
МПК: B64D 15/00
Мітки: система, протиобледеніння, апарата, літального
Формула / Реферат:
Система протиобледеніння літального апарата, яка має n датчиків струму, n контакторів, n нагрівальних елементів, пристрій управління, джерело живлення, до якого через відповідні контактори підключені нагрівальні елементи, яка відрізняється тим, що містить n формувачів імпульсів, n детекторів фронту і n детекторів спаду, причому виходи і-го датчика струму з'єднані з входами і-го формувача імпульсів, вихід якого з'єднаний через і-тий детектор...
Адаптивна система протиобледеніння літального апарата
Номер патенту: 50673
Опубліковано: 15.10.2002
Автори: Чечуй Олександр Вікторович, Торчило Віталій Микитович, Жихарев Володимир Якович, Кас'ян Ольга Викторівна, Шилова Тетяна Вікторівна
МПК: B64D 15/00
Мітки: апарата, літального, протиобледеніння, система, адаптивна
Формула / Реферат:
Адаптивна система протиобледеніння літального апарата, яка має n контакторів, n нагрівальних елементів, джерело живлення, до якого через відповідні контактори підключені нагрівальні елементи, n індикаторів відмови, яка відрізняється тим, що містить блок пам'яті, двійковий лічильник, генератор імпульсів, причому вихід і-го індикатора відмови з'єднаний з і-им входом блока пам'яті, вихід генератора імпульсів з'єднаний з рахунковим входом...
Система управління літального апарата
Номер патенту: 62989
Опубліковано: 15.01.2004
Автори: Гусєв Борис Васильович, Затолокін Анатолій Сергійович, Абрамов Євген Ілліч, Мойсеєв Володимир Гаврилович, Абрамов Леонід Ілліч
МПК: B64C 13/00
Мітки: управління, система, апарата, літального
Формула / Реферат:
Система управління літального апарата, яка містить важелі управління, сполучені з електродистанційною системою управління, яка включає електрично сполучені між собою датчики переміщення важелів управління, обчислювачі та електрогідравлічні сервоприводи, а також гідродистанційну систему управління, з'єднану з важелями управління, яка включає гідравлічно сполучені між собою гідравлічний датчик команд та гідравлічний сервопривод, при цьому...
Попередній патент: Витратомір-сигналізатор
Наступний патент: Резервований обчислювальний пристрій в системі залишкових класів
Випадковий патент: Спосіб лікування обструктивного бронхіту у дітей