Система стабілізації безпілотного літального апарата
Номер патенту: 11981
Опубліковано: 16.01.2006
Автори: Симонов Володимир Федорович, Величко Надія Вікторівна, Бандура Іван Миколайович

Формула / Реферат
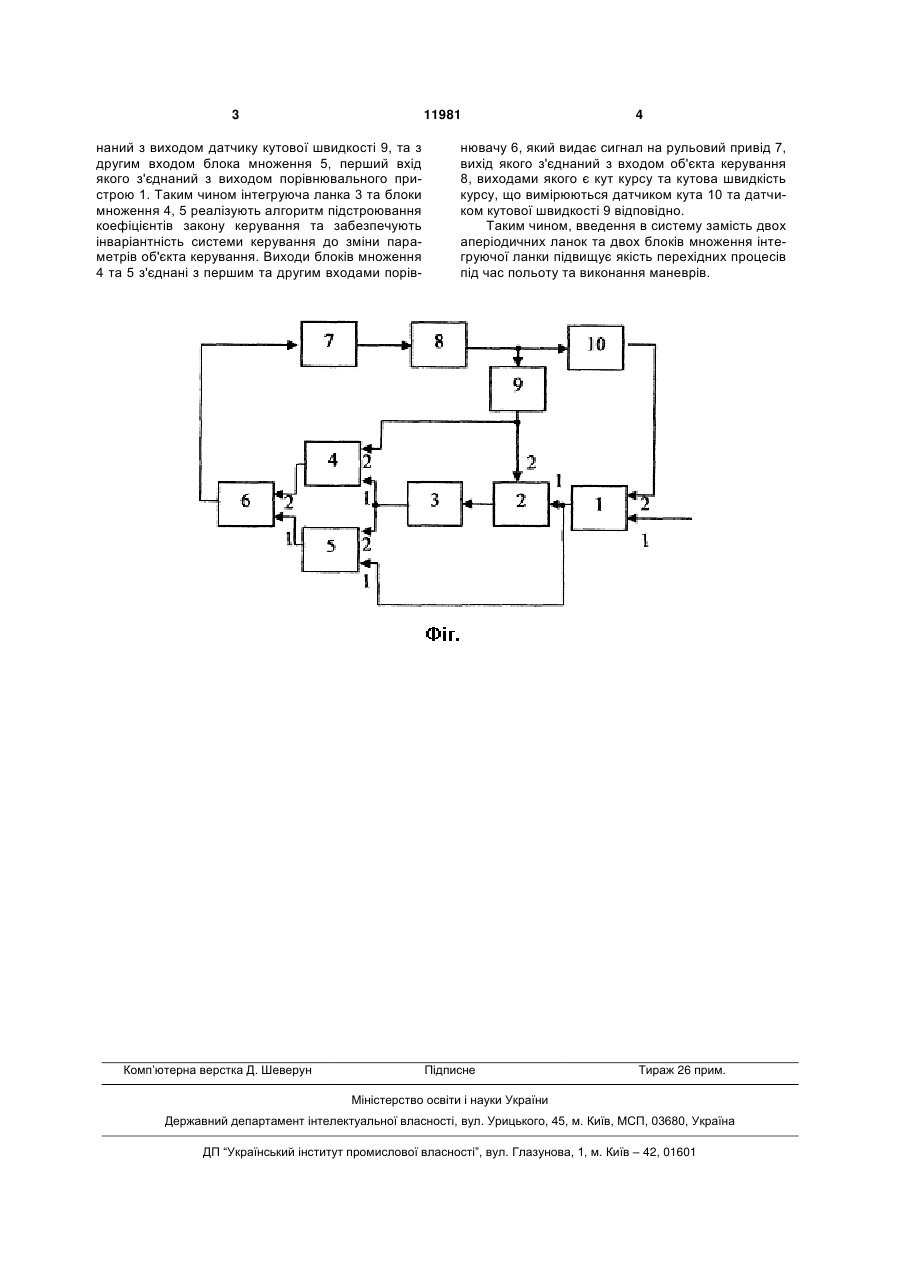
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення.
Текст
Система стабілізації безпілотного літального апарата, що містить порівнювальний пристрій, датчики кута та кутової швидкості, пристрій керування, перший та другий блоки множення, порівнювач та рульовий привід, яка відрізняється тим, що до неї введена інтегруюча ланка, входом якої є вихід пристрою керування, а її вихід з'єднаний з другим входом першого блока множення та з першим входом другого блока множення. (19) (21) u200507107 (22) 18.07.2005 (24) 16.01.2006 (46) 16.01.2006, Бюл. №1, 2006р. (72) Симонов Володимир Федорович, Бандура Іван Миколайович, Величко Надія Вікторівна (73) НАЦІОНАЛЬНИЙ АЕРОКОСМІЧНИЙ УНІВЕРСИТЕТ ІМ. М.Є. ЖУКОВСЬКОГО "ХАРКІВСЬКИЙ АВІАЦІЙНИЙ ІНСТИТУТ" 3 11981 наний з виходом датчику кутової швидкості 9, та з другим входом блока множення 5, перший вхід якого з'єднаний з виходом порівнювального пристрою 1. Таким чином інтегруюча ланка 3 та блоки множення 4, 5 реалізують алгоритм підстроювання коефіцієнтів закону керування та забезпечують інваріантність системи керування до зміни параметрів об'єкта керування. Виходи блоків множення 4 та 5 з'єднані з першим та другим входами порів Комп’ютерна верстка Д. Шеверун 4 нювачу 6, який видає сигнал на рульовий привід 7, вихід якого з'єднаний з входом об'єкта керування 8, виходами якого є кут курсу та кутова швидкість курсу, що вимірюються датчиком кута 10 та датчиком кутової швидкості 9 відповідно. Таким чином, введення в систему замість двох аперіодичних ланок та двох блоків множення інтегруючої ланки підвищує якість перехідних процесів під час польоту та виконання маневрів. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюStabilization system of unmanned aircraft
Автори англійськоюSymonov Volodymyr Fedorovych, Bandura Ivan Mykolaiovych
Назва патенту російськоюСистема стабилизации беспилотного летательного аппарата
Автори російськоюСимонов Владимир Федорович, Бандура Иван Николаевич
МПК / Мітки
МПК: G05D 1/03, B64C 13/00
Мітки: стабілізації, апарата, безпілотного, літального, система
Код посилання
<a href="https://ua.patents.su/2-11981-sistema-stabilizaci-bezpilotnogo-litalnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Система стабілізації безпілотного літального апарата</a>
Система керування двигуновою установкою літального апарата
Номер патенту: 61817
Опубліковано: 17.11.2003
Автори: Дигало Оксана Миколаївна, Лазоркін Юрій Юрійович, Цехмейстер Олена Олексіївна, Кулік Анатолій Степанович, Бандура Іван Миколайович
МПК: B64D 31/00
Мітки: система, керування, двигуновою, апарата, літального, установкою
Формула / Реферат:
Система керування двигуновою установкою літального апарата, що містить датчик частоти обертання ротора двигуна, електричний привід паливного агрегату, з'єднаний з паливним агрегатом, яка відрізняється тим, що в неї введені датчик тиску повітря за компресором, послідовно з'єднаний з блоком регулювань точності датчика тиску, датчик температури повітря за вентилятором, послідовно з'єднаний із блоком регулювань точності датчика температури, блок...
Адаптивна система протиобледеніння літального апарата
Номер патенту: 50673
Опубліковано: 15.10.2002
Автори: Жихарев Володимир Якович, Чечуй Олександр Вікторович, Торчило Віталій Микитович, Кас'ян Ольга Викторівна, Шилова Тетяна Вікторівна
МПК: B64D 15/00
Мітки: апарата, система, літального, адаптивна, протиобледеніння
Формула / Реферат:
Адаптивна система протиобледеніння літального апарата, яка має n контакторів, n нагрівальних елементів, джерело живлення, до якого через відповідні контактори підключені нагрівальні елементи, n індикаторів відмови, яка відрізняється тим, що містить блок пам'яті, двійковий лічильник, генератор імпульсів, причому вихід і-го індикатора відмови з'єднаний з і-им входом блока пам'яті, вихід генератора імпульсів з'єднаний з рахунковим входом...
Пульт, система та спосіб ручного керування та стабілізації регульованої величини руху літального апарата “аржесан”
Номер патенту: 26286
Опубліковано: 19.07.1999
Автор: Кашматов Віктор Йосипович
МПК: B64C 13/00
Мітки: стабілізації, апарата, величини, аржесан, регульованої, пульт, руху, літального, спосіб, керування, ручного, система
Формула / Реферат:
1. Пульт ручного управления и стабилизации регулируемой величины движения летательного аппарата, например воздушного судна, включающий стрелку и рукоятку, отличающийся тем, что стрелка выполнена в форме рукоятки и совмещена с нею, пульт ручного управления и стабилизации построен по схеме замкнутой системы непрямого регулирования положения рукоятки, которая (система) имеет вход и выход для связи с исполнительным контуром системы ручного...
Система протиобледеніння літального апарата
Номер патенту: 50674
Опубліковано: 15.10.2002
Автори: Торчило Віталій Микитович, Шилова Тетяна Вікторівна, Жихарев Володимир Якович, Чечуй Олександр Вікторович, Кас'ян Ольга Викторівна
МПК: B64D 15/00
Мітки: літального, протиобледеніння, система, апарата
Формула / Реферат:
Система протиобледеніння літального апарата, яка має n датчиків струму, n контакторів, n нагрівальних елементів, пристрій управління, джерело живлення, до якого через відповідні контактори підключені нагрівальні елементи, яка відрізняється тим, що містить n формувачів імпульсів, n детекторів фронту і n детекторів спаду, причому виходи і-го датчика струму з'єднані з входами і-го формувача імпульсів, вихід якого з'єднаний через і-тий детектор...
Система контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 31643
Опубліковано: 15.07.2002
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28, G06F 15/16
Мітки: реєстрації, параметрів, контролю, силової, апарата, установки, літального, система
Формула / Реферат:
Система контролю та реєстрації параметрів силової установки літального апарата, яка містить блок обчислювача, послідовно з’єднані блок нормалізаторів, комутатор, аналого-цифровий перетворювач, перший операційний блок виходами з’єднаний з блоком обчислювача та комутатором, яка відрізняється тим, що в систему додатково введені два блоки формувачів, два перетворювачі частота-код, другий комутатор, два шинних формувачі, два блоки автоматичного...
Попередній патент: Спосіб виробництва комбінованих кремово-збивних цукерок
Наступний патент: Система керування космічним літальним апаратом
Випадковий патент: Спосіб екстрагування з твердого тіла