Адаптивна система управління
Номер патенту: 11808
Опубліковано: 16.01.2006
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Шемшур Микола Володимирович, Рудико Оксана Вікторівна
Формула / Реферат
1. Адаптивна система управління, що містить перший блок інтеграторів, перший блок підсилювачів, об'єкт управління, другий блок інтеграторів, яка відрізняється тим, що в систему введено обчислювач, з'єднаний з виходом пристрою узгодження через блок аналого-цифрових перетворювачів та з входом другого блока інтеграторів через блок цифро-аналогових перетворювачів.
2. Адаптивна система управління за п. 1, яка відрізняється тим, що пристрій узгодження, встановлений у ланцюгу зворотного зв'язку за вихідним сигналом та його похідною, містить з'єднані перший і другий блоки коректуючих підсилювачів, виходи яких з'єднані з входом блока аналого-цифрових перетворювачів.
Текст
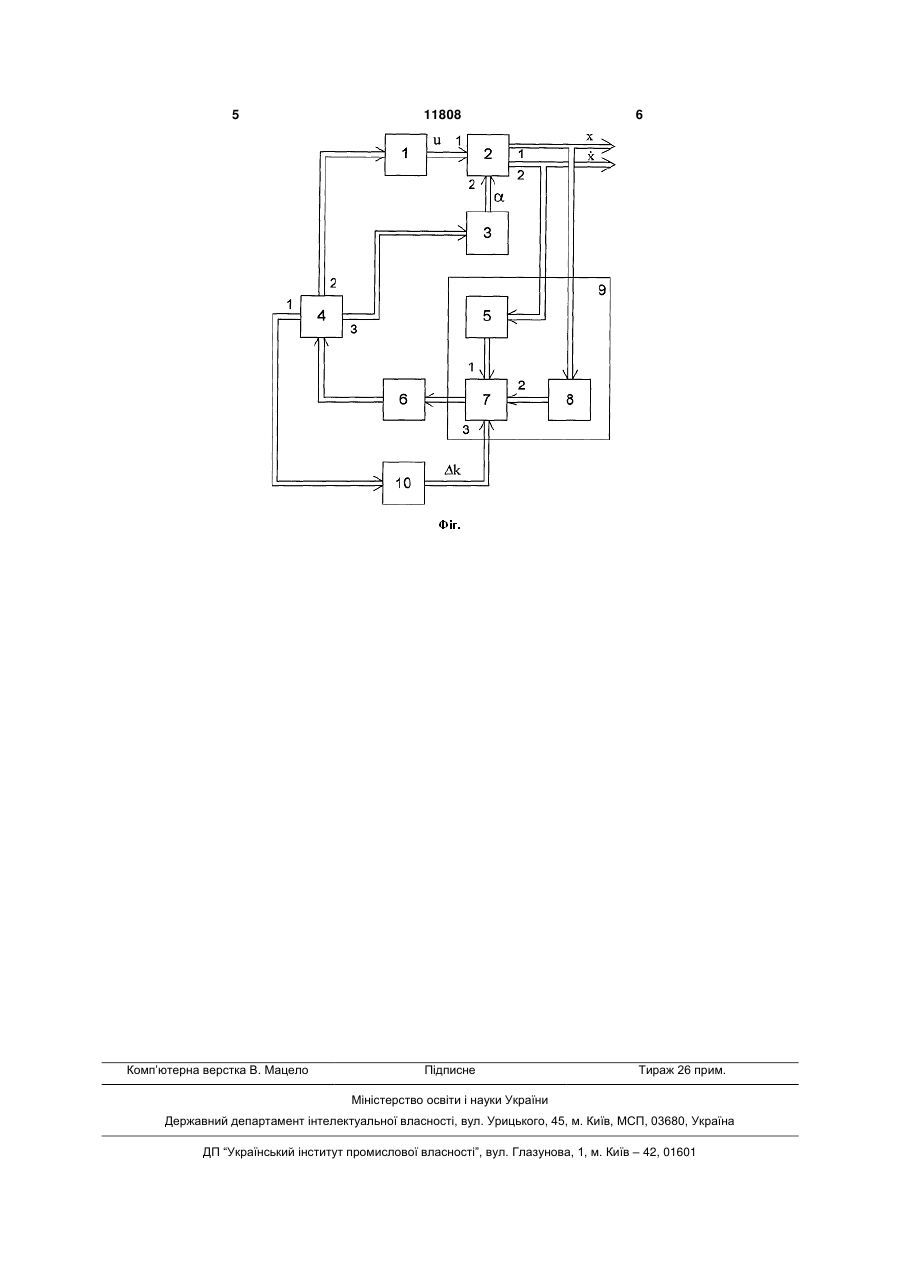
1. Адаптивна система управління, що містить перший блок інтеграторів, перший блок підсилювачів, об'єкт управління, другий блок інтеграторів, 3 11808 4 тора, другий блок помножувачів підключений до Коли розмірності a(t) та (t) співпадають, першого суматора. Крім того, пристрій узгодження, k(t)=0. встановлений в ланцюгу зворотного зв'язку за виК(т) визначається рівнянням хідним сигналом та його похідною, містить з'єднані TK( t ) K( t )B( t )R 1( t )BT ( t )K( t ) Q( t ) (t) K K ( t )A ( t ) A .(4) перший і другий блоки коректуючих підсилювачів, K( t ) Fx ( t ) виходи яких з'єднані з входом блока аналогоцифрових перетворювачів. Еталонна система: Для забезпечення надійності, точності, з меxM( t ) A( t )xM( t ) B( t )u( t ) . (5) тою зменшення ваги та габаритів в систему був xM( t0 ) x0 введений обчислювач. Для забезпечення узгоФункція Гамільтона для системи (5): дження сигналів між об'єктом управління та обчислювачем, у систему був введений пристрій узго1 T 1 T H0 x ( t )Q( t )xM( t ) u ( t )R( t )u( t ) дження. Для забезпечення стійкості системи 2 M 2 . (6) управління і кращої якості перехідного процесу в 1 T x T ( t )K( t )xM( t ) x ( t )K( t )xM( t ) ланцюг зворотного зв'язку за вихідним сигналом та M 2 M його похідною введені коректуючи підсилювачі у Для системи (1) будується функція Н - вихідскладі пристрою узгодження. ний сигнал обчислювача Завдяки цьому під час польоту, та при вико1 T 1 T x ( t )Q( t )xM( t ) u ( t )R( t )u( t ) xT ( t )K( t )xM( t ) M 2 M 2 1 T x ( t )K( t )xM( t ) xT ( t )G( t )x( t ) xTK( t )x( t ) 2 M H0 xT ( t )( G( t )x( t ) K( t )x( t )) (7) xT ( t )N( t ) де G( t ) K( t )A( t ) K( t )B( t )R 1( t )BT ( t )K( t ), . G( t )x( t ) K( t )x( t ) (8) N( t ) Із (7) слідує, що Н=0 є необхідною та достатньою умовою мінімуму функціонала (2). Ця обставина є основою конструкції алгоритмів настройки, за допомогою яких будуть парируватися параметричні впливи a(t). Для асимптотичної збіжності до оптимального значення критерію якості, перестроювання параметрів об'єкта або управління повинно проходити згідно з рівняннями: (t) H·K( t )·x( t )·xT ( t ), ( t0 ) k 0 H·K( t )·x( t )·xT ( t ), (9) k( t 0 ) 0 визначаючи вихідні значення а та k третього та десятого блоків інтеграторів, причому значення K(t), G(t), R-1(t)B(t)K(t), необхідні для роботи алгоритмів, визначаються до начала роботи системи на стадії проектування. Рішення поставленої задачі досягається тим, що в адаптивну систему управління, що містить послідовно з'єднані перший блок інтеграторів, перший блок підсилювачів, об'єкт управління, другий блок інтеграторів, згідно з корисною моделлю введено обчислювач, з'єднаний з виходом пристрою узгодження через блок аналого-цифрових перетворювачів та входом другого блоку інтеграторів через блок цифро-аналогових перетворювачів. Крім того, обчислювач містить послідовно з'єднані другий блок підсилювачів, перший суматор, перший, третій та четвертий блоки помножувачів, третій блок підсилювачів, другий суматор, четвертий блок підсилювачів підключений до другого сума нанні літальним апаратом маневрів зникає необхідність проводити перерахунок коефіцієнтів закону управління. Обчислювач вибирає їх значення з існуючого стандартного набору алгоритмів управління в залежності від програми польоту. Сутність корисної моделі пояснюється кресленням, де на Фіг. зображена блок-схема запропонованої системи управління. Адаптивна система управління містить: перший блок підсилювачів 1, вихід якого підключений до першого входу об'єкта управління 2, блок інтеграторів 3, блок цифро-аналогових перетворювачів 4, перший блок коректуючих підсилювачів 5, обчислювач 6, блок аналого-цифрових перетворювачів 7, блок коректуючих підсилювачів 8, пристрій узгодження 9, перший блок інтеграторів 10. Система управління працює таким чином: для управління об'єктом вихідні координати об'єкта управління 2х та x через пристрій узгодження 9, що містить два блоки коректуючих підсилювачів 5 та 8, а також блок аналого-цифрових перетворювачів 7, подаються на обчислювач 6 задля отримання значень гамільтоніана Н. З обчислювача 6 створені управляючі сигнали через блок цифроаналогових перетворювачів 4 подаються на входи блоків інтеграторів 3 та 10, котрі визначають алгоритми настроювання управляючого впливу або параметрів об'єкта управління. Вихідний сигнал а блока інтеграторів З надходить до другого входу об'єкта управління 2. Вихідний сигнал k блока інтеграторів 10 подається на обчислювач 6 через блок аналого-цифрових перетворювачів 7. На другому виході блока цифро-аналогових перетворювачів 4 після проходження через блок підсилювачів 1 утворюється управляючий сигнал й, який подається на перший вхід об'єкта управління 2. Таким чином, введення в систему цифрового обчислювача та пристрою узгодження суттєво підвищує якість перехідних процесів, швидкодію системи, надійність та точність, а також зменшує вагу та габарити. 5 Комп’ютерна верстка В. Мацело 11808 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAdaptive control system
Автори англійськоюSymonov Volodymyr Fedorovych, Bandura Ivan Mykolaiovych
Назва патенту російськоюАдаптивная система управления
Автори російськоюСимонов Владимир Федорович, Бандура Иван Николаевич
МПК / Мітки
МПК: G05B 13/00
Мітки: управління, адаптивна, система
Код посилання
<a href="https://ua.patents.su/3-11808-adaptivna-sistema-upravlinnya.html" target="_blank" rel="follow" title="База патентів України">Адаптивна система управління</a>
Система управління процесом технічної експлуатації
Номер патенту: 73458
Опубліковано: 15.07.2005
Автори: Волошин Ігор Іванович, Семон Богдан Йосипович, Блаженний Валерій Іванович, Пустовий Сергій Олексійович
МПК: G05B 13/00
Мітки: технічної, експлуатації, управління, процесом, система
Формула / Реферат:
Система управління процесом технічної експлуатації, що містить блок формування мети процесу технічної експлуатації, блок управління законом першого каналу, блок управління законом другого каналу, блок закону управління першого каналу, блок закону управління другого каналу, пристрій управління першого каналу, пристрій управління другого каналу, блок зовнішніх факторів, блок процесу технічної експлуатації і об'єкт експлуатації, яка...
Адаптивна система протиобледеніння літального апарата
Номер патенту: 50673
Опубліковано: 15.10.2002
Автори: Кас'ян Ольга Викторівна, Чечуй Олександр Вікторович, Торчило Віталій Микитович, Жихарев Володимир Якович, Шилова Тетяна Вікторівна
МПК: B64D 15/00
Мітки: протиобледеніння, апарата, система, літального, адаптивна
Формула / Реферат:
Адаптивна система протиобледеніння літального апарата, яка має n контакторів, n нагрівальних елементів, джерело живлення, до якого через відповідні контактори підключені нагрівальні елементи, n індикаторів відмови, яка відрізняється тим, що містить блок пам'яті, двійковий лічильник, генератор імпульсів, причому вихід і-го індикатора відмови з'єднаний з і-им входом блока пам'яті, вихід генератора імпульсів з'єднаний з рахунковим входом...
Система управління літальним апаратом
Номер патенту: 63736
Опубліковано: 15.01.2004
Автори: Симонов Володимир Федорович, Бандура Іван Миколайович, Субота Анатолій Максимович
МПК: B64C 13/00
Мітки: літальним, управління, апаратом, система
Формула / Реферат:
Система управління літальним апаратом, яка містить важіль управління, завантажувальну пружину, датчик кутового положення важеля управління, обчислювач, сервопривід керма висоти, датчик кута тангажа, датчик кутової швидкості і датчик кутового прискорення літального апарата, яка відрізняється тим, що в ній до датчика кутового положення важеля управління під'єднано перший диференціюючий пристрій, вихід якого під'єднано до входу обчислювача і до...
Адаптивна резервована система
Номер патенту: 51152
Опубліковано: 15.11.2002
Автори: Дергачов Володимир Андрійович, Кулік Анатолій Степанович, Доценко Наталія Володимирівна
МПК: G06F 11/18
Мітки: система, резервована, адаптивна
Формула / Реферат:
Адаптивна резервована система, яка має блоки, що резервуються, елементи нерівнозначності, елементи І, пороговий елемент, вихід системи, двійковий лічильник, перший і другий елементи АБО, причому вихід і -го блока, що резервується з'єднаний з першим входом і-го елемента І, вихід і-го елемента нерівнозначності з'єднаний з другим входом і-го елемента І, вихід якого з'єднаний з і-им входом першої групи входів порогового елемента, вихід порогового...
Система управління потужністю двигунів внутрішнього згоряння відключенням робочих циклів
Номер патенту: 70122
Опубліковано: 15.09.2004
Автори: Попик Анатолій Федорович, Панченко Михайло Іванович, Синявський Микола Володимирович, Філіппов Анатолій Захарович, Атаманенко Микола Євгенович
МПК: F02D 17/00
Мітки: система, потужністю, внутрішнього, згоряння, відключенням, циклів, робочих, двигунів, управління
Формула / Реферат:
Система управління потужністю двигунів внутрішнього згоряння відключенням робочих циклів, що містить електронний пристрій управління впорскуванням палива та електромагнітні форсунки, яка відрізняється тим, що система доповнена електронним пристроєм, який включає логічний елемент АБО, очікуючий мультивібратор, логічний блок збігу, причому вхід лінії затримки підключений до виходу електронного пристрою управління впорскуванням через логічний...
Попередній патент: Нагрівальний пристрій каталітичних нейтралізаторів
Наступний патент: Спосіб прогнозування ризику розвитку рогівкових ускладнень при хірургічному лікуванні катаракти
Випадковий патент: Спосіб усування оро-антрального сполучення