Система управління літальним апаратом
Номер патенту: 63736
Опубліковано: 15.01.2004
Автори: Бандура Іван Миколайович, Симонов Володимир Федорович, Субота Анатолій Максимович
Формула / Реферат
Система управління літальним апаратом, яка містить важіль управління, завантажувальну пружину, датчик кутового положення важеля управління, обчислювач, сервопривід керма висоти, датчик кута тангажа, датчик кутової швидкості і датчик кутового прискорення літального апарата, яка відрізняється тим, що в ній до датчика кутового положення важеля управління під'єднано перший диференціюючий пристрій, вихід якого під'єднано до входу обчислювача і до входу другого диференціюючого пристрою, вихід якого під'єднано до входу обчислювача.
Текст
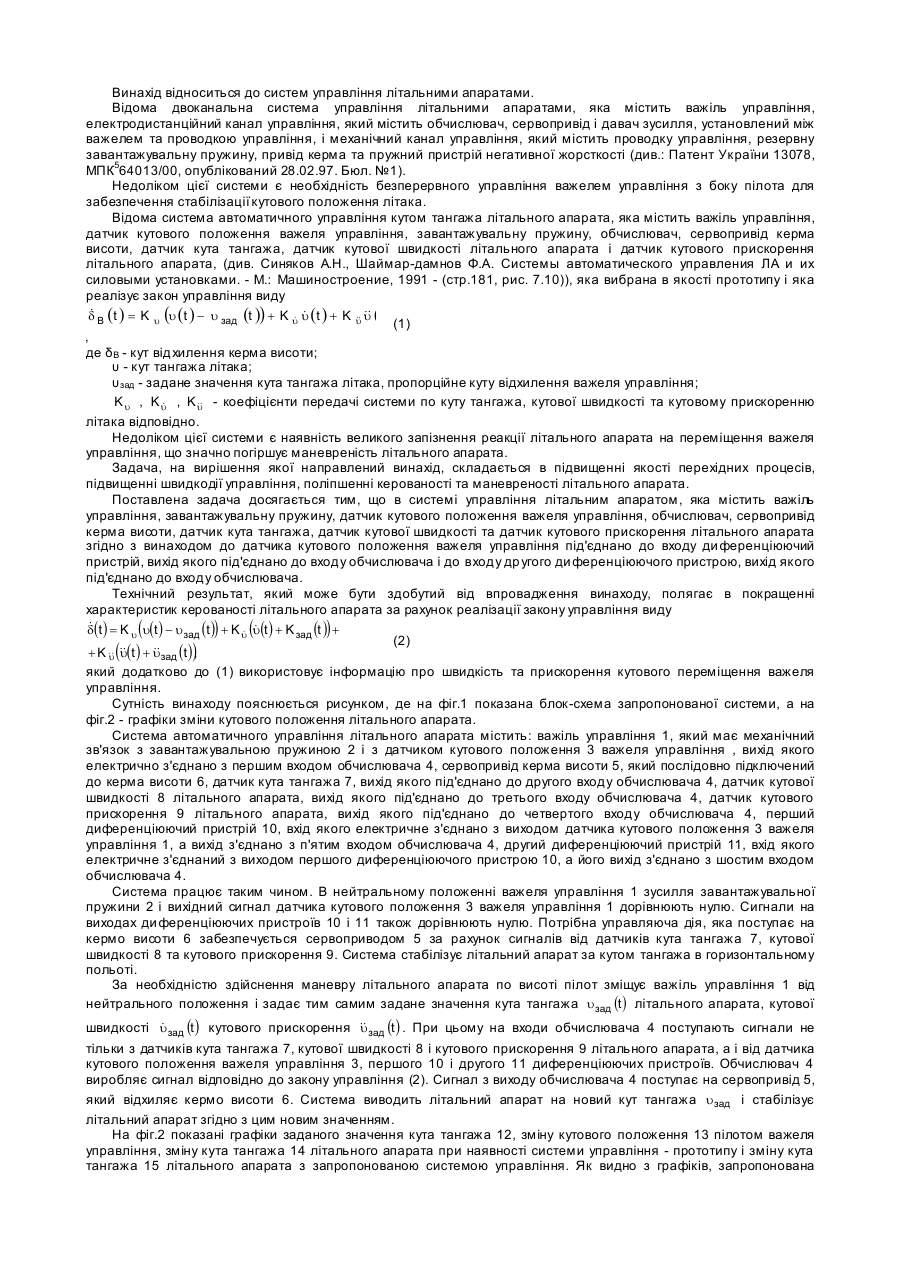
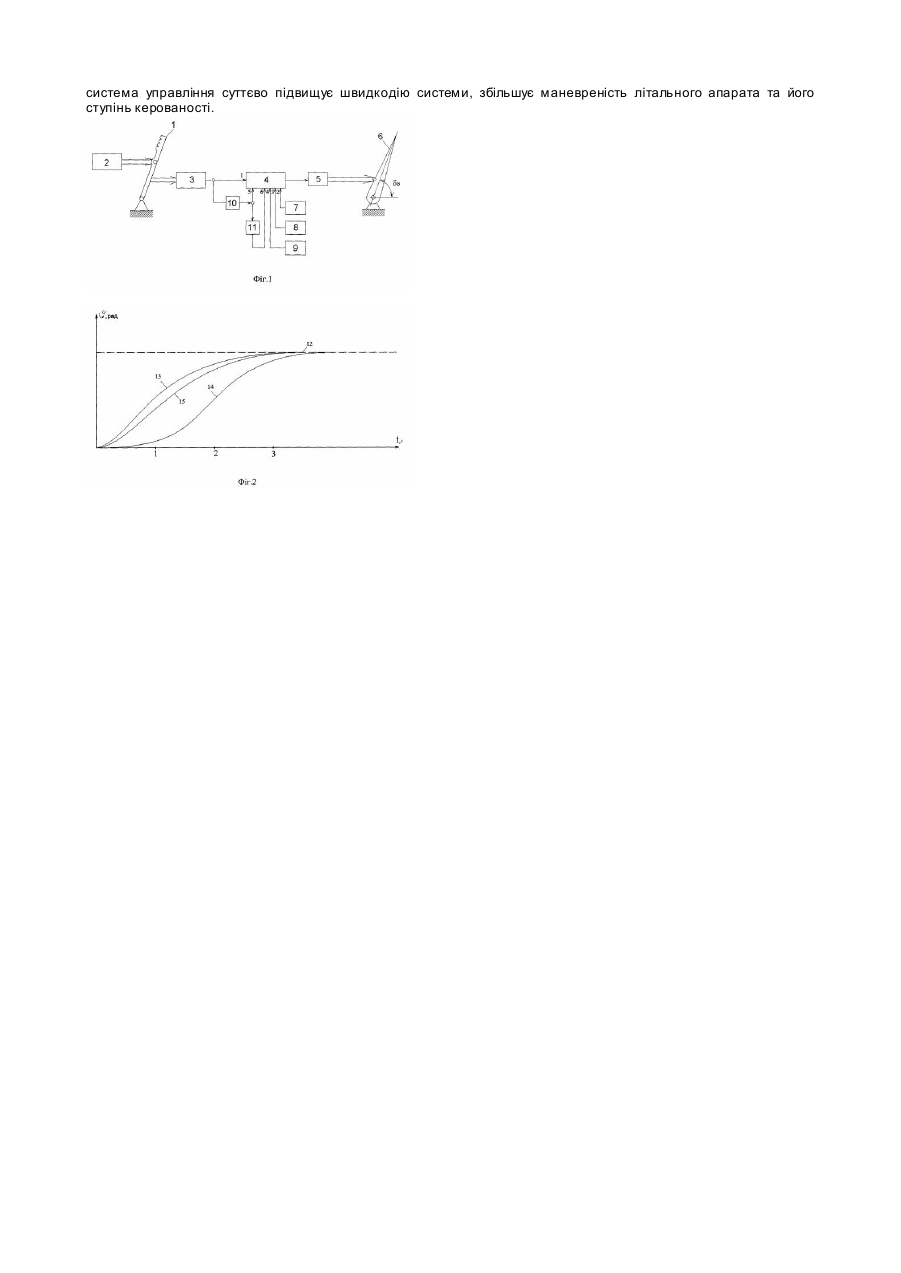
Винахід відноситься до систем управління літальними апаратами. Відома двоканальна система управління літальними апаратами, яка містить важіль управління, електродистанційний канал управління, який містить обчислювач, сервопривід і давач зусилля, установлений між важелем та проводкою управління, і механічний канал управління, який містить проводку управління, резервну завантажувальну пружину, привід керма та пружний пристрій негативної жорсткості (див.: Патент України 13078, МПК564013/00, опублікований 28.02.97. Бюл. №1). Недоліком цієї системи є необхідність безперервного управління важелем управління з боку пілота для забезпечення стабілізації кутового положення літака. Відома система автоматичного управління кутом тангажа літального апарата, яка містить важіль управління, датчик кутового положення важеля управління, завантажувальну пружину, обчислювач, сервопривід керма висоти, датчик кута тангажа, датчик кутової швидкості літального апарата і датчик кутового прискорення літального апарата, (див. Синяков Α.Η., Шаймар-дамнов Φ.Α. Системы автоматического управления ЛА и их силовыми установками. - М.: Машиностроение, 1991 - (стр.181, рис. 7.10)), яка вибрана в якості прототипу і яка реалізує закон управління виду & d B (t ) = K u (u (t ) - u зад (t )) + K u u (t ) + K u && ( & & && u (1) , де δВ - кут відхилення керма висоти; υ - кут тангажа літака; υ зад - задане значення кута тангажа літака, пропорційне куту відхилення важеля управління; K u , K u , K u - коефіцієнти передачі системи по куту тангажа, кутової швидкості та кутовому прискоренню & && літака відповідно. Недоліком цієї системи є наявність великого запізнення реакції літального апарата на переміщення важеля управління, що значно погіршує маневреність літального апарата. Задача, на вирішення якої направлений винахід, складається в підвищенні якості перехідних процесів, підвищенні швидкодії управління, поліпшенні керованості та маневреності літального апарата. Поставлена задача досягається тим, що в системі управління літальним апаратом, яка містить важіль управління, завантажувальну пружину, датчик кутового положення важеля управління, обчислювач, сервопривід керма висоти, датчик кута тангажа, датчик кутової швидкості та датчик кутового прискорення літального апарата згідно з винаходом до датчика кутового положення важеля управління під'єднано до входу ди ференціюючий пристрій, вихід якого під'єднано до входу обчислювача і до входу др угого ди ференціюючого пристрою, вихід якого під'єднано до входу обчислювача. Технічний результат, який може бути здобутий від впровадження винаходу, полягає в покращенні характеристик керованості літального апарата за рахунок реалізації закону управління виду & d(t ) = K u u(t ) - uзад (t ) + K u u(t ) + K зад (t ) + & & (2) && + K &u &&(t ) + uзад (t ) , & u який додатково до (1) використовує інформацію про швидкість та прискорення кутового переміщення важеля управління. Сутність винаходу пояснюється рисунком, де на фіг.1 показана блок-схема запропонованої системи, а на фіг.2 - графіки зміни кутового положення літального апарата. Система автоматичного управління літального апарата містить: важіль управління 1, який має механічний зв'язок з завантажувальною пружиною 2 і з датчиком кутового положення 3 важеля управління , вихід якого електрично з'єднано з першим входом обчислювача 4, сервопривід керма висоти 5, який послідовно підключений до керма висоти 6, датчик кута тангажа 7, вихід якого під'єднано до другого входу обчислювача 4, датчик кутової швидкості 8 літального апарата, вихід якого під'єднано до третього входу обчислювача 4, датчик кутового прискорення 9 літального апарата, вихід якого під'єднано до четвертого входу обчислювача 4, перший диференціюючий пристрій 10, вхід якого електричне з'єднано з виходом датчика кутового положення 3 важеля управління 1, а вихід з'єднано з п'ятим входом обчислювача 4, другий диференціюючий пристрій 11, вхід якого електричне з'єднаний з виходом першого диференціюючого пристрою 10, а його вихід з'єднано з шостим входом обчислювача 4. Система працює таким чином. В нейтральному положенні важеля управління 1 зусилля завантажувальної пружини 2 і вихідний сигнал датчика кутового положення 3 важеля управління 1 дорівнюють нулю. Сигнали на виходах ди ференціюючих пристроїв 10 і 11 також дорівнюють нулю. Потрібна управляюча дія, яка поступає на кермо висоти 6 забезпечується сервоприводом 5 за рахунок сигналів від датчиків кута тангажа 7, кутової швидкості 8 та кутового прискорення 9. Система стабілізує літальний апарат за кутом тангажа в горизонтальному польоті. За необхідністю здійснення маневру літального апарата по висоті пілот зміщує важіль управління 1 від нейтрального положення і задає тим самим задане значення кута тангажа uзад (t ) літального апарата, кутової ( ( ) ) ( ) & швидкості uзад (t ) кутового прискорення && зад (t ) . При цьому на входи обчислювача 4 поступають сигнали не u тільки з датчиків кута тангажа 7, кутової швидкості 8 і кутового прискорення 9 літального апарата, а і від датчика кутового положення важеля управління 3, першого 10 і другого 11 диференціюючих пристроїв. Обчислювач 4 виробляє сигнал відповідно до закону управління (2). Сигнал з виходу обчислювача 4 поступає на сервопривід 5, який відхиляє кермо висоти 6. Система виводить літальний апарат на новий кут тангажа uзад і стабілізує літальний апарат згідно з цим новим значенням. На фіг.2 показані графіки заданого значення кута тангажа 12, зміну кутового положення 13 пілотом важеля управління, зміну кута тангажа 14 літального апарата при наявності системи управління - прототипу і зміну кута тангажа 15 літального апарата з запропонованою системою управління. Як видно з графіків, запропонована система управління суттєво підвищує швидкодію системи, збільшує маневреність літального апарата та його ступінь керованості.
ДивитисяДодаткова інформація
Назва патенту англійськоюAircraft control system
Автори англійськоюSymonov Volodymyr Fedorovych, Subota Anatolii Maksymovych, Bandura Ivan Mykolaiovych
Назва патенту російськоюСистема управления летательным аппаратом
Автори російськоюСимонов Владимир Федорович, Субота Анатолий Максимович, Бандура Иван Николаевич
МПК / Мітки
МПК: B64C 13/00
Мітки: система, літальним, апаратом, управління
Код посилання
<a href="https://ua.patents.su/2-63736-sistema-upravlinnya-litalnim-aparatom.html" target="_blank" rel="follow" title="База патентів України">Система управління літальним апаратом</a>
Система управління літальним апаратом
Номер патенту: 13078
Опубліковано: 28.02.1997
Автори: Орепер Володимир Якович, Конев Валерій Тимофійович, Абрамов Євген Ілліч
МПК: B64C 13/00
Мітки: система, апаратом, управління, літальним
Формула / Реферат:
(57) 1. Система управления летательным аппаратом, содержащая рычаг управления, электродистанционный канал управления, включающий вычислитель, сервопривод и датчик усилий, установленный между рычагом и проводкой управления, и механический канал управления, включающий проводку управления и резервную загрузочную пружину и привод руля, отличающаяся тем, что в ней параллельно рычагу управления к датчику усилий подсоединено пружинное устройство...
Спосіб управління літальним апаратом
Номер патенту: 32455
Опубліковано: 15.12.2000
Автори: Корольов Анатолій Миколайович, Семенов Леонід Антонович, Шепелев Юрій Іванович, Яковенко Петро Олексійович, Доценко Борис Іванович, Бондарчук Павло Степанович, Коростельов Олег Петрович, Смішко Григорій Павлович, Кузьмін В'ячеслав Павлович, Косовенко Євген Вікторович
Мітки: спосіб, літальним, апаратом, управління
Текст:
...значень коефіцієнта шар нірного моменту (наприклад, за допомогою вибору геометричних параметрів руля та розташування, осі його повороту), моменту інерції рульового приводу з рулями відносно їх осі повороту, частоти обертання літального апарата навколо його подовженої осі (наприклад, за допомогою початкового кута установки крил або сопел двигуна) та моменту уз годжувального імітатора додаткового моменту. Одна з можливи х конструктивних схем...
Спосіб керування літальним апаратом та зміни його аеродинамічної компоновки і система керування
Номер патенту: 55253
Опубліковано: 17.03.2003
Автори: Егліт Микола Олександрович, Комендантова Людмила Степанівна, Смішко Григорій Павлович, Сайног Максим Борисович, Семенов Леонід Антонович, Яковенко Петро Олексійович, Доценко Борис Іванович, Кузьмін В'ячеслав Павлович, Косовенко Євген Вікторович
МПК: F42B 15/01
Мітки: система, літальним, спосіб, аеродинамічної, апаратом, керування, зміни, компоновки
Формула / Реферат:
1. Спосіб керування літальним апаратом та зміни його аеродинамічного компонування, який полягає у зміні кількості рулів, що беруть участь у процесі керування літальним апаратом, який відрізняється тим, що здійснюють одночасне розкривання двох пар рулів і приведення в дію першої пари рулів для керування по тангажу і (або) рисканню, а другу пару рулів утримують під нульовим кутом, використовуючи їх як стабілізатори, поки виконується...
Спосіб управління літальним апаратом
Номер патенту: 17957
Опубліковано: 17.06.1997
Автори: Шабохін Віктор Олексійович, Ільясов Микола Халікович, Конюхов Станіслав Миколаєвич, Бушуєв Євген Іванович
МПК: F41G 7/00
Мітки: спосіб, апаратом, літальним, управління
Формула / Реферат:
1. Способ управления летательным аппаратом, включающий операции по измерению текущих параметров движения, определению рассогласования измеренных параметров движения от программных и формированию управляющего сигнала пропорционально величине рассогласования, отличающийся тем, что параметры движения измеряют в существующем, искусственно созданном глобальной спутниковой системой навигационном поле, с помощью радиоприемных навигационных...
Обчислювальна система візуального керування літальним апаратом
Номер патенту: 56876
Опубліковано: 15.05.2003
Автори: Гусятін Володимир Михайлович, Янковський Олександр Аркадійович
МПК: B64F 1/00, G06F 7/548
Мітки: система, апаратом, обчислювальна, візуального, керування, літальним
Формула / Реферат:
Обчислювальна система візуального керування літальним апаратом, що містить формувач сигналів зображення і блок керування, яка відрізняється тим, що в неї введені графічний спецпроцесор для систем візуалізації, блок обчислень по 3D-об'єктах, блок зв'язку з бортовим комп'ютером, зв'язаний двоспрямовано з блоком керування, перший пристрій для обчислення швидких геометричних перетворень, зв'язаний двоспрямовано з блоком керування і з’єднаний...
Попередній патент: Спосіб вимірювання температури
Наступний патент: Сушарка для сільськогосподарських матеріалів, сформованих в рулони
Випадковий патент: Спосіб одержання поверхневої текстури