Спосіб визначення параметрів взаємодії колеса з рейкою
Номер патенту: 12394
Опубліковано: 02.12.1996
Автори: Горбунов Микола Іванович, Тасанг Ерік Хельмутович, Кашура Олександр Леонідович, Голубенко Олександр Леонідович, Міщенко Костянтин Павлович, Полищук Володимир Анатолійович, Костюкевич Олександр Іванович
Формула / Реферат
Способ определения параметров взаимодействия колеса с рельсом, заключающийся в том, что на шейке одного из рельсов размещают группу из шести датчиков, расположенных в вертикальной плоскости и установленных попарно симметрично относительно вертикальной оси на фиксированных расстояниях от головки рельса, приводят во взаимодействие колесную пару и рельсовую колею в месте размещения датчиков и измеряют сигналы с датчиков, отличающийся тем, что на рельсе через интервалы устанавливают несколько групп датчиков, каждую пару датчиков включают в отдельную схему, при регистрации сигналов с датчиков измеряют сдвиг по времени между сигналами от различных групп и используют полученные данные для определения параметров взаимодействия колесной пары с рельсовой колеёй.
Текст
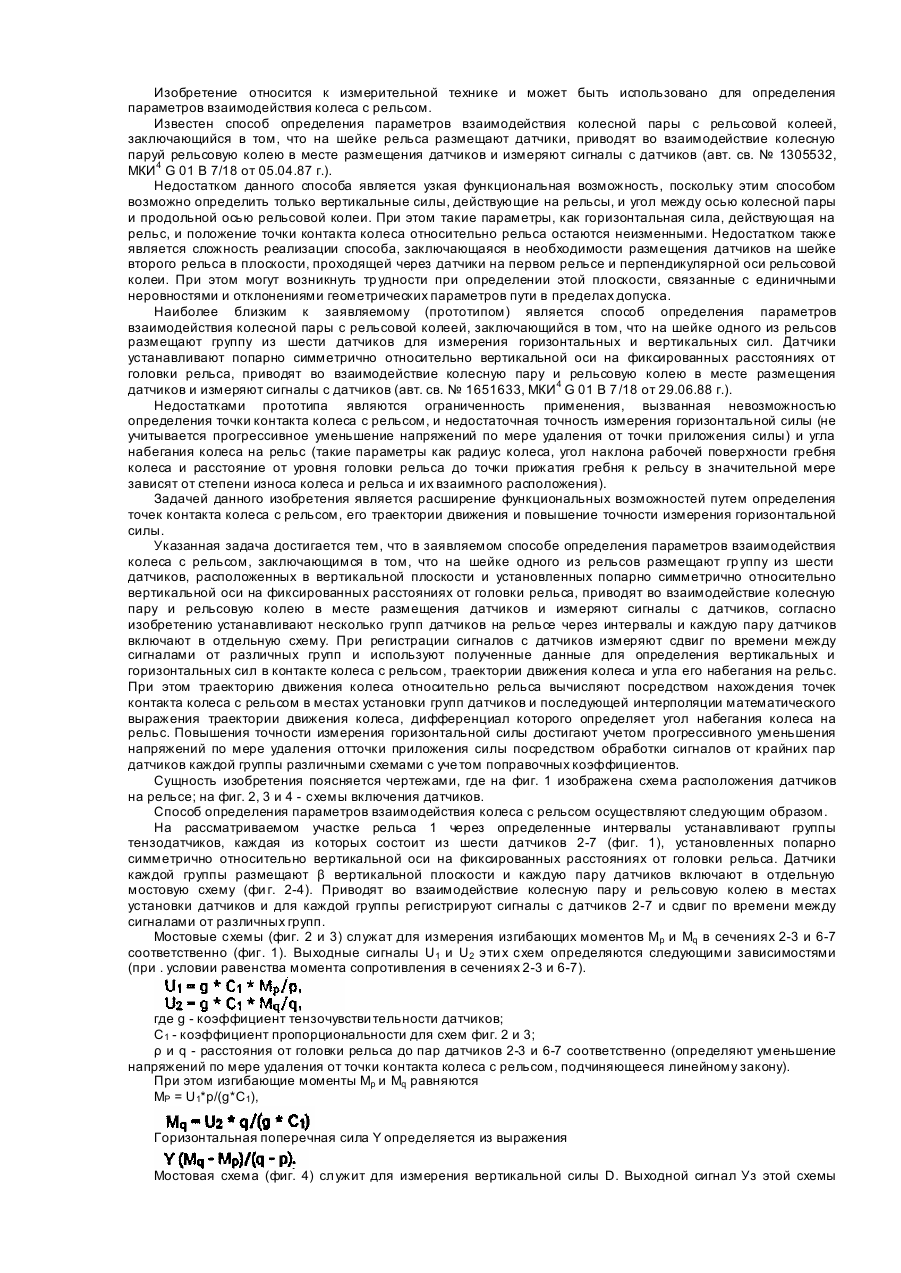
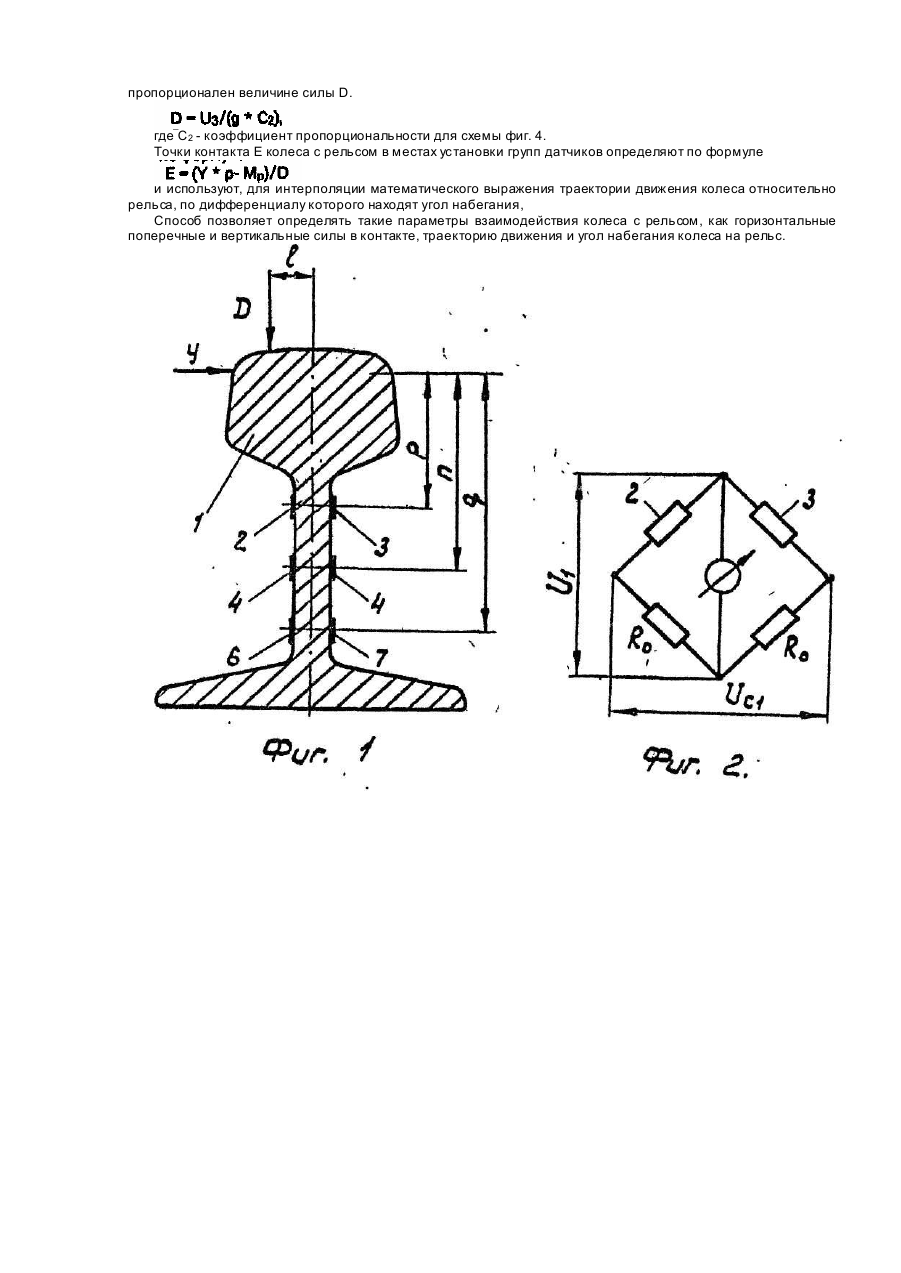
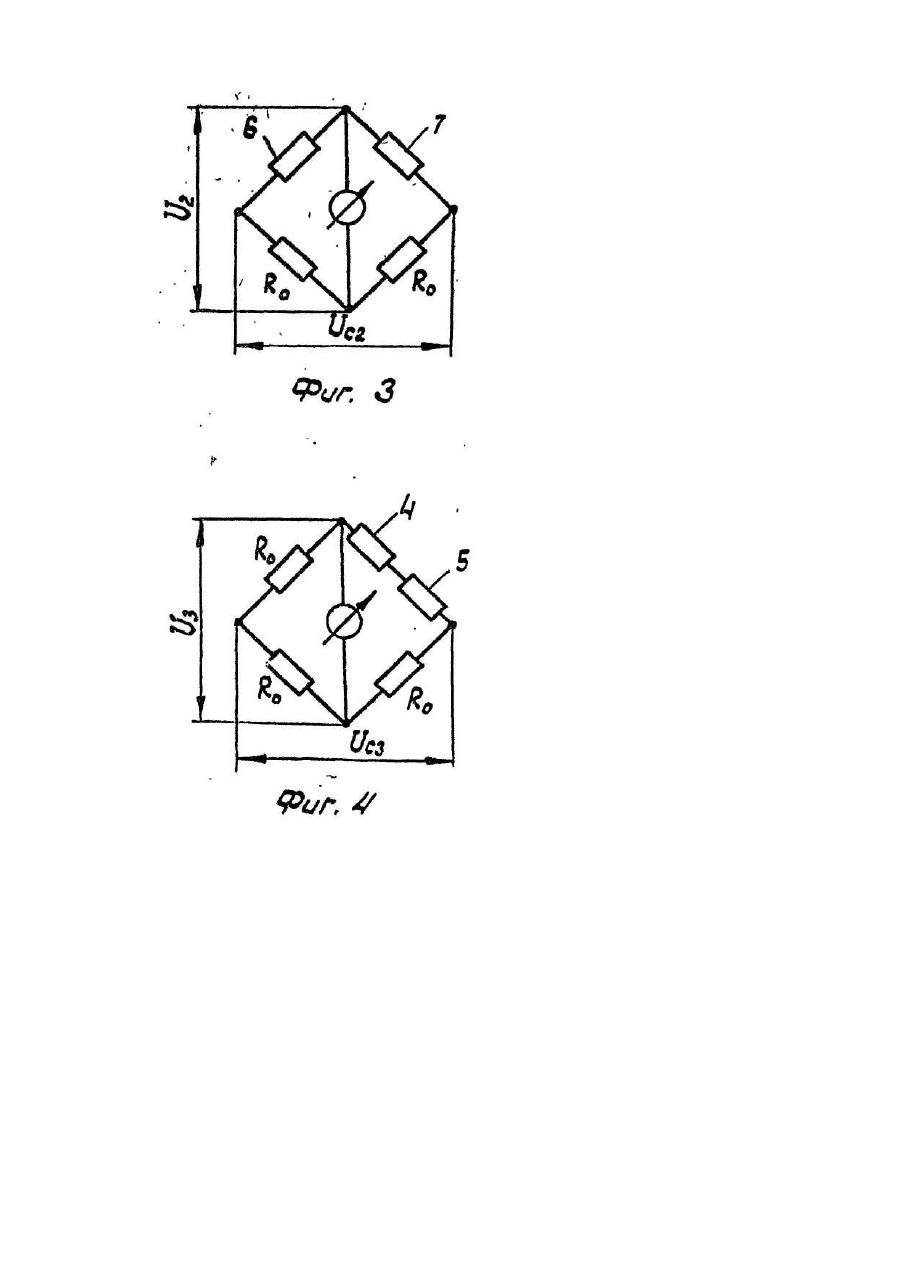
Изобретение относится к измерительной технике и может быть использовано для определения параметров взаимодействия колеса с рельсом. Известен способ определения параметров взаимодействия колесной пары с рельсовой колеей, заключающийся в том, что на шейке рельса размещают датчики, приводят во взаимодействие колесную паруй рельсовую колею в месте размещения датчиков и измеряют сигналы с датчиков (авт. св. № 1305532, МКИ 4 G 01 В 7/18 от 05.04.87 г.). Недостатком данного способа является узкая функциональная возможность, поскольку этим способом возможно определить только вертикальные силы, действующие на рельсы, и угол между осью колесной пары и продольной осью рельсовой колеи. При этом такие параметры, как горизонтальная сила, действующая на рельс, и положение точки контакта колеса относительно рельса остаются неизменными. Недостатком также является сложность реализации способа, заключающаяся в необходимости размещения датчиков на шейке второго рельса в плоскости, проходящей через датчики на первом рельсе и перпендикулярной оси рельсовой колеи. При этом могут возникнуть тр удности при определении этой плоскости, связанные с единичными неровностями и отклонениями геометрических параметров пути в пределах допуска. Наиболее близким к заявляемому (прототипом) является способ определения параметров взаимодействия колесной пары с рельсовой колеей, заключающийся в том, что на шейке одного из рельсов размещают группу из шести датчиков для измерения горизонтальных и вертикальных сил. Датчики устанавливают попарно симметрично относительно вертикальной оси на фиксированных расстояниях от головки рельса, приводят во взаимодействие колесную пару и рельсовую колею в месте размещения датчиков и измеряют сигналы с датчиков (авт. св. № 1651633, МКИ 4 G 01 В 7 /18 от 29.06.88 г.). Недостатками прототипа являются ограниченность применения, вызванная невозможностью определения точки контакта колеса с рельсом, и недостаточная точность измерения горизонтальной силы (не учитывается прогрессивное уменьшение напряжений по мере удаления от точки приложения силы) и угла набегания колеса на рельс (такие параметры как радиус колеса, угол наклона рабочей поверхности гребня колеса и расстояние от уровня головки рельса до точки прижатия гребня к рельсу в значительной мере зависят от степени износа колеса и рельса и их взаимного расположения). Задачей данного изобретения является расширение функциональных возможностей путем определения точек контакта колеса с рельсом, его траектории движения и повышение точности измерения горизонтальной силы. Указанная задача достигается тем, что в заявляемом способе определения параметров взаимодействия колеса с рельсом, заключающимся в том, что на шейке одного из рельсов размещают гр уппу из шести датчиков, расположенных в вертикальной плоскости и установленных попарно симметрично относительно вертикальной оси на фиксированных расстояниях от головки рельса, приводят во взаимодействие колесную пару и рельсовую колею в месте размещения датчиков и измеряют сигналы с датчиков, согласно изобретению устанавливают несколько групп датчиков на рельсе через интервалы и каждую пару датчиков включают в отдельную схему. При регистрации сигналов с датчиков измеряют сдвиг по времени между сигналами от различных групп и используют полученные данные для определения вертикальных и горизонтальных сил в контакте колеса с рельсом, траектории движения колеса и угла его набегания на рельс. При этом траекторию движения колеса относительно рельса вычисляют посредством нахождения точек контакта колеса с рельсом в местах установки групп датчиков и последующей интерполяции математического выражения траектории движения колеса, дифференциал которого определяет угол набегания колеса на рельс. Повышения точности измерения горизонтальной силы достигают учетом прогрессивного уменьшения напряжений по мере удаления отточки приложения силы посредством обработки сигналов от крайних пар датчиков каждой группы различными схемами с уче том поправочных коэффициентов. Сущность изобретения поясняется чертежами, где на фиг. 1 изображена схема расположения датчиков на рельсе; на фиг. 2, 3 и 4 - схемы включения датчиков. Способ определения параметров взаимодействия колеса с рельсом осуществляют следующим образом. На рассматриваемом участке рельса 1 через определенные интервалы устанавливают группы тензодатчиков, каждая из которых состоит из шести датчиков 2-7 (фиг. 1), установленных попарно симметрично относительно вертикальной оси на фиксированных расстояниях от головки рельса. Датчики каждой группы размещают β вертикальной плоскости и каждую пару датчиков включают в отдельную мостовую схему (фи г. 2-4). Приводят во взаимодействие колесную пару и рельсовую колею в местах установки датчиков и для каждой группы регистрируют сигналы с датчиков 2-7 и сдвиг по времени между сигналами от различных групп. Мостовые схемы (фиг. 2 и 3) служат для измерения изгибающих моментов Мр и Мq в сечениях 2-3 и 6-7 соответственно (фиг. 1). Выходные сигналы U1 и U2 эти х схем определяются следующими зависимостями (при . условии равенства момента сопротивления в сечениях 2-3 и 6-7). где g - коэффициент тензочувстви тельности датчиков; С1 - коэффициент пропорциональности для схем фиг. 2 и 3; ρ и q - расстояния от головки рельса до пар датчиков 2-3 и 6-7 соответственно (определяют уменьшение напряжений по мере удаления от точки контакта колеса с рельсом, подчиняющееся линейному закону). При этом изгибающие моменты Мр и Mq равняются MP = U1*p/(g*C1), Горизонтальная поперечная сила Υ определяется из выражения Мостовая схема (фиг. 4) служит для измерения вертикальной силы D. Выходной сигнал Уз этой схемы пропорционален величине силы D. где С2 - коэффициент пропорциональности для схемы фиг. 4. Точки контакта Ε колеса с рельсом в местах установки групп датчиков определяют по формуле и используют, для интерполяции математического выражения траектории движения колеса относительно рельса, по дифференциалу которого находят угол набегания, Способ позволяет определять такие параметры взаимодействия колеса с рельсом, как горизонтальные поперечные и вертикальные силы в контакте, траекторию движения и угол набегания колеса на рельс.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of interaction of wheel with rail
Автори англійськоюHorbunov Mykola Ivanovych, Polischuk Volodymyr Anatoliiovych, Myschenko Kostiantyn Pavlovych, Holubenko Oleksandr Leonidovych, Kashura Oleksandr Leonidovych, Kostiukevych Oleksandr Ivanovych, Tasang Erik Helmutovych
Назва патенту російськоюСпособ определения параметров взаимодействия колеса с рельсом
Автори російськоюГорбунов Николай Иванович, Полищук Владимир Анатольевич, Мищенко Константин Павлович, Голубенко Александр Леонидович, Кашура Александр Леонидович, Костюкевич Александр Иванович, Тасанг Эрик Хельмутович
МПК / Мітки
МПК: G01B 7/16
Мітки: параметрів, рейкою, взаємодії, визначення, спосіб, колеса
Код посилання
<a href="https://ua.patents.su/3-12394-sposib-viznachennya-parametriv-vzaehmodi-kolesa-z-rejjkoyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення параметрів взаємодії колеса з рейкою</a>
Механізм переміщення колеса транспортного засобу у вертикальній поздовжій площині
Номер патенту: 815
Опубліковано: 01.01.1993
Автор: Москаль Григорій Євдокимович
МПК: B62D 53/00
Мітки: колеса, переміщення, поздовжій, вертикальний, механізм, засобу, площині, транспортного
Формула / Реферат:
Механизм перемещения колеса транспортного средства в вертикальной продольной плоскости, содержащий приводной винт, закрепленную на оси транспортного средства с возможностью вращения в вертикальной плоскости двуплечую стойку, на одном конце которой установлено колесо, отличающийся тем, что, с целью упрощения конструкции и расширения эксплуатационных возможностей, устройство снабжено установленным на приводном валу вильчатым ползуном,...
Спосіб визначення параметрів вектору дисбалансу роторів та пристрій для його здійснення

Номер патенту: 2744
Опубліковано: 26.12.1994
Автори: Єфремов Володимир Борисович, Муравський Аркадій Миколайович, Прилуцький Валерій Львович, Добровольський Геннадій Георгійович, Савченко Лідія Михайлівна
МПК: G01M 1/22
Мітки: вектору, спосіб, визначення, пристрій, параметрів, здійснення, роторів, дисбалансу
Формула / Реферат:
1. Способ определения параметров вектора дисбаланса роторов, заключающийся в том, что по окружности ротора наносят равноудаленные метки, одну из которых принимают за нулевую, приводят ротор во вращение и о параметрах вектора дисбаланса судят по сигналу с датчика дисбаланса, отличающийся тем, что, с целью повышения точности, отсчитывают число меток в интервале от нулевой метки до метки, совпадающей с моментом перехода сигнала сдатчика...
Пристрій для визначення параметрів турбулентності у атмосферному прикордонному шарі
Номер патенту: 3818
Опубліковано: 27.12.1994
Автори: Сідоров Геннадій Іванович, Сідько Василь Іванович, Альохін Володимир Іванович
МПК: G01W 1/00, B64D 33/00
Мітки: шарі, прикордонному, параметрів, визначення, пристрій, атмосферному, турбулентності
Формула / Реферат:
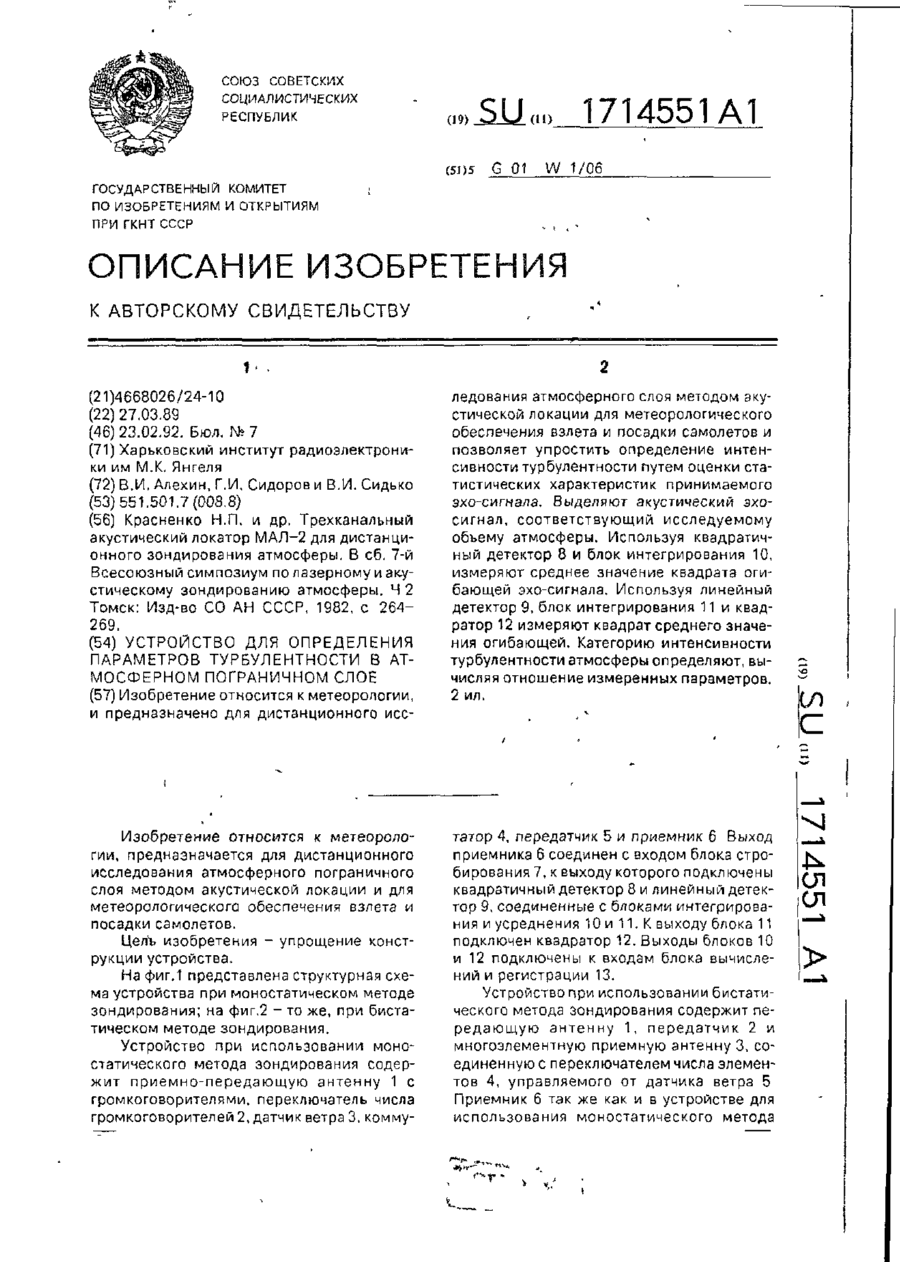
Устройство для определения параметров турбулентности в атмосферном пограничном слое включающее передатчик, блок выделения эхо-сигнала, приемник, связанный с блоком вычислений, отличающееся тем, что, с целью упрощения конструкции, связь между приемником и блоком вычислений осуществлена через введенные, последовательно соединенные линейный детектор, первый блок интегрирования и усреднения и квадратор, подключенный к первому входу блока...
Спосіб визначення параметрів іонізуючого випромінювання оптоволоконним дозиметром
Номер патенту: 3676
Опубліковано: 27.12.1994
Автори: Токаревський Володимир Васильович, Азаров Сергій Іванович
МПК: G01T 1/02
Мітки: визначення, іонізуючого, спосіб, випромінювання, оптоволоконним, дозиметром, параметрів
Формула / Реферат:
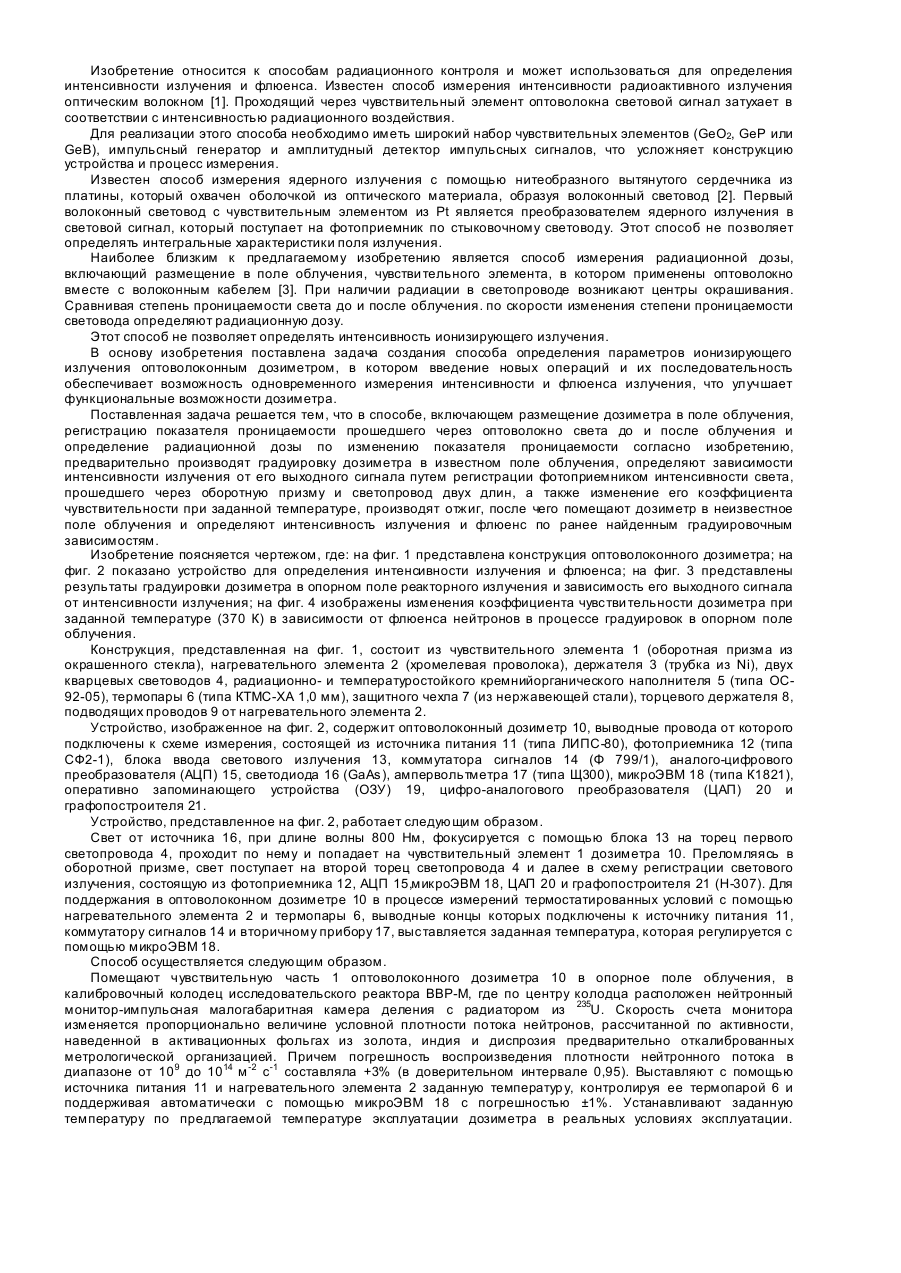
Способ определения параметров ионизирующего излучения оптоволоконным дозиметром. включающий размещение его в поле облучения, регистрацию показателя проницаемости прошедшего через оптоволокно света, по изменению которого судят о радиационной дозе, отличающийся тем, что производят регистрацию интенсивности света, прошедшего через оборотную призму и два светопровода в процессе градуировки в известном поле облучения, находят зависимость величины...
Спосіб дослідження взаємодії факелів розпилюванного палива з повітряним зарядом в дизелі
Номер патенту: 9214
Опубліковано: 30.09.1996
Автори: Копачев Микола Федірович, Строков Олександр Петрович, Лесовицький Ігор Всеволодович, Биков Віктор Іванович, Парсаданов Ігор Володимирович
МПК: F02M 65/00
Мітки: зарядом, розпилюванного, повітряним, факелів, спосіб, дизелі, дослідження, палива, взаємодії
Формула / Реферат:
Способ исследования взаимодействия факелов распыленного топлива с воздушным зарядом в дизеле, заключающийся в том, что осуществляют рабочие циклы дизеля и после его разборки определяют результаты взаимодействия факелов распыленного топлива с воздушным зарядом по отложениям на стенках камеры сгорания, отличающийся тем, что, с целью повышения точности и сокращения времени исследования в широком диапазоне нагрузочных режимов, в топливо...
Попередній патент: Спосіб вимірювання температури термопарою і пристрій для його здійснення
Наступний патент: Сонячний тепловий колектор
Випадковий патент: Комбайн для збирання зернових