Спосіб визначення параметрів вектору дисбалансу роторів та пристрій для його здійснення
Номер патенту: 2744
Опубліковано: 26.12.1994
Автори: Єфремов Володимир Борисович, Муравський Аркадій Миколайович, Прилуцький Валерій Львович, Добровольський Геннадій Георгійович, Савченко Лідія Михайлівна




Формула / Реферат
1. Способ определения параметров вектора дисбаланса роторов, заключающийся в том, что по окружности ротора наносят равноудаленные метки, одну из которых принимают за нулевую, приводят ротор во вращение и о параметрах вектора дисбаланса судят по сигналу с датчика дисбаланса, отличающийся тем, что, с целью повышения точности, отсчитывают число меток в интервале от нулевой метки до метки, совпадающей с моментом перехода сигнала сдатчика дисбаланса через нулевое значение, от этой метки дополнительно отсчитывают четверть общего числа меток для определения итоговой метки, и о фазе дисбаланса судят по положению последней, а об амплитуде по сигналу с датчика дисбаланса — в момент фиксации итоговой метки.
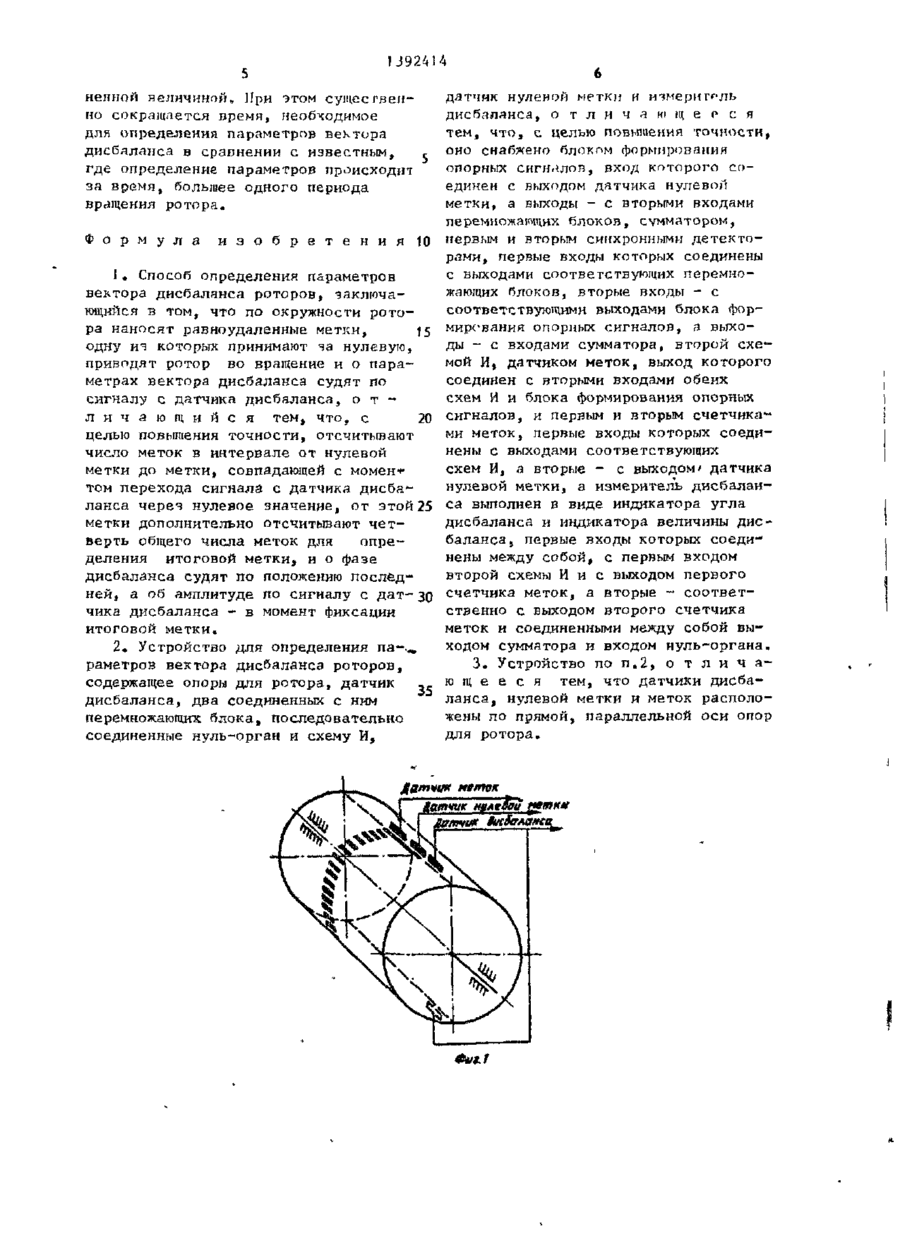
2. Устройство для определения параметров вектора дисбаланса роторов, содержащее опоры для ротора, датчик дисбаланса, два соединенных с ним перемножающих блока, последовательно соединенные нуль-орган и схему И, датчик нулевой метки и измеритель дисбаланса, отличающееся тем, что, с целью повышения точности, оно снабжено блоком формирования опорных сигналов, вход которого соединен с выходом датчика нулевой метки, а выходы — с вторыми входами перемножающих блоков, сумматором, первым и вторым синхронными детекторами, первые входы которых соединены с выходами соответствующих перемножающих блоков, вторые входы — с соответствующими выходами блока формирования опорных сигналов, а выходы — с входами сумматора, второй схемой И, датчиком меток, выход которого соединен с вторыми входами обеих схем И и блока формирования опорных сигналов, и первым и вторым счетчиками меток, первые входы которых соединены с выходами соответствующих схем И, а вторые — с выходом датчика нулевой метки, а измеритель дисбаланса выполнен в виде индикатора угла дисбаланса и индикатора величины дисбаланса, первые входы которых соединены между собой, с первым входом второй схемы И и с выходом первого счетчика меток, а вторые — соответственно с выходом второго счетчика меток и соединенными между собой выходом сумматора и входом нуль-органа.
3. Устройство по п. 2, отличающееся тем, что датчики дисбаланса, нулевой метки и меток расположены по прямой, параллельной оси опор для ротора.
Текст
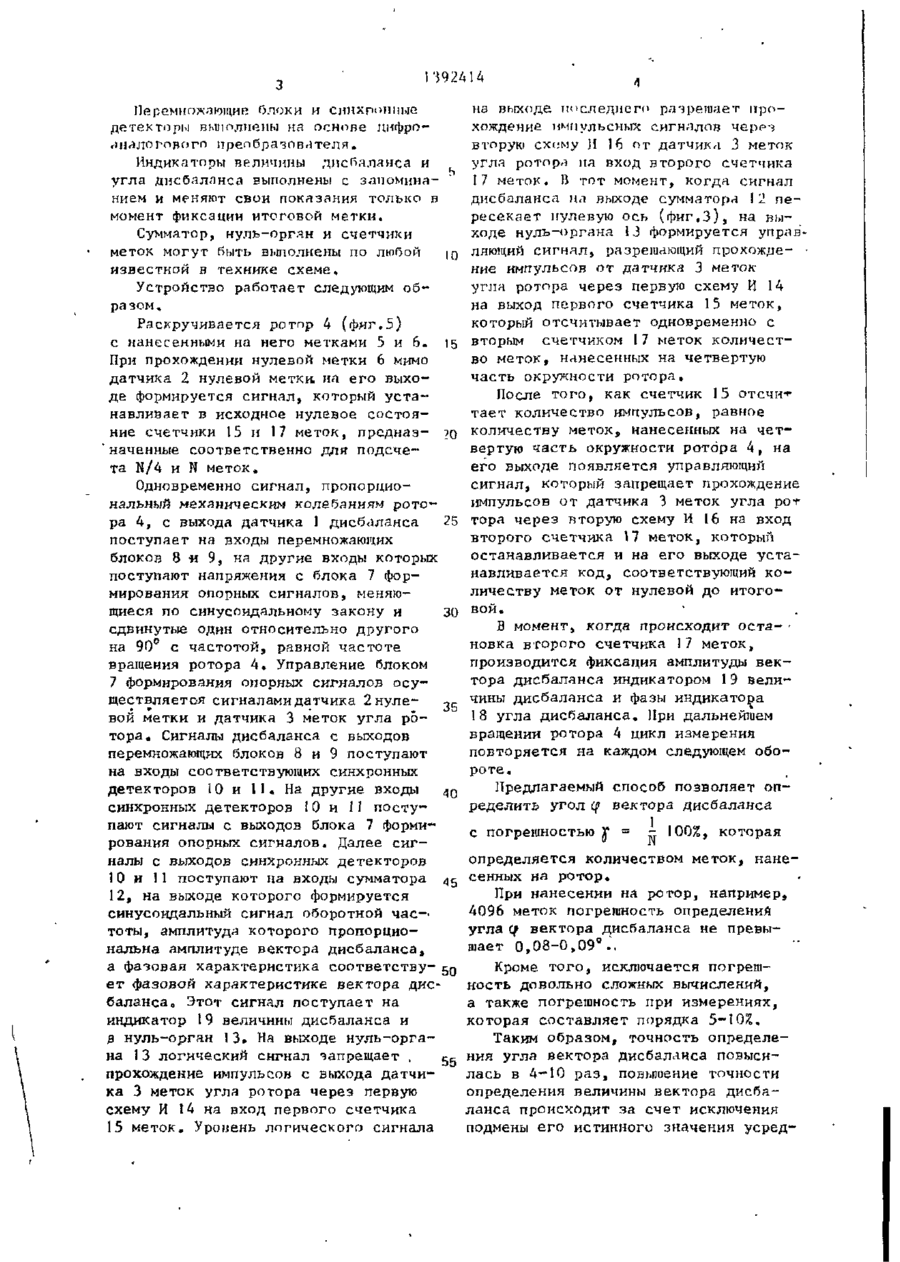
Изобретение относится к балансировочной технике. Цель изобретения повышение точности за счет исключения динамической погрешности. Ио окружности ротора 4 наносят її равноудалённых методе 5, одну ия них принимают за нулевую метку 6. При вращении ротора 4 фиксируют сигналы с датчиков },2 и 3 дисбаланса, нулевой метки и меток. В счетчике 17 ме^пк отсчитывают число меток от нулевой до меткі-ij совпадающей с моментом перехода через О нуль сигнала с датчика 1 дисбаланса, (Л С 1392414 что фиксируется с помощью нуль-органа 13, за гем к попученному числу меток прибавляют N/4 меток с помощью счетчика меток и получают число N-, соответствующее фазе дисбаланса, которая определяется как ( - ЭТИ^/Н f и индицируется с помощью индикатора 18 угла дисбаланса. Амплитуда дисбаланса фиксируется в момент отсчета NQ метки и индицируется на индикаторе 19 величины дисбаланса. 2 с.п. и 1 з.п, ф-лы, 4 ил. Изобретение относится к балансировочной технике и может быть использовано при балансировке роторов различных машин, а также прецизионных станков в условиях повышенных вибраций фундаментов. Цель изобретения - повышение точности за счет исключения динамической погрешности, достигаемое путем 10 учета изменения скорости вращения за один оборот. На фиг.1 представлен балансируемый ротор с нанесенными метками и установленными датчиками, общий вид; на фиг.2 - эпюра сигнала дисбаланса при постоянной скорости вращения ротора; на фиг.З - то же, при перемен1-' ной скорости вращения ротора; на фиг.4 - функциональная схема устрой20 ства. Способ определения параметров вектора дисбаланса заключается в том, что наносят по окружности Н равноудаленных меток, одну из которых прини25 мают за нулевую, отмечая ее любым известным способом, приводят ротор во вращение, фиксируют сигнал с датчика дисбаланса, отсчитывают число її; меток от нулевой метки до метки, совпадающей с моментом перехода 30 через нулевое значение сигнала с датчика дисбаланса, от этой метки отсчитывают дополнительно ЇЇ/4 меток для определения итоговой метки, определяемой числом N-, и по сигналу с датчи-35 ка дисбаланса в момент фиксации итоговой метки ]}а судят об амплитуде дисбаланса, и по положению итоговой метки - о фазе дисбаланса, определяемой как < ~ ^TNa/N. 7 40 нулевой метки и меток, расположенных на прямой, параллельной оси опор для ротора 4, на который нанесены метки 5 и нулевая метка 6, блок 7 формирования опорных сигналов, входы которого соединены с выходами датчиков 2 и 3 нулевой метки и меток, первый и •• второй перемножающие блоки 8 и ,9, входы которых соединены с выходом датчика 1 дисбаланса, первый и второй синхронные детекторы 10 и П , первые входы которых соединены с выходами соответствующих перемножающих блоков 8 и 9, а вторые - со вторыми входами последних и с соответствующими выходами блока 7 формирования опорных сигналов, последовательно соединенные сумматор 12, входы которого соединены с выходами синхронных детекторов 10 и 11, нуль-орган 13, схему И 14 и счетчик 15 меток, последовательно соединенные вторую схему И 16, второй вход которой соединен с вторым входом первой схемы И 14 и выходом датчика 3 меток, и второй счетчик 17 меток, второй вход которого соединен с вторым входом первого счетчика 15 меток и с выходом датчика 2 нулевой метки, и измеритель дисбаланса, выполненный в виде индикатора 18 угла дисбаланса и индикатора 19 величины дисбаланса, первые вході.! которых согединены между собой, с первым входом второй схемы И 16 и с выходом первого счетчика 15 меток, а вторые соответственно с выходами второго счетчика 17 меток и суммато ра 12. Устройс гво для реализации способа содержит да і миге и 1,2 и 'і дисбаланса Блок формирования опорных сигналов представляет собой квадратурный цифровой генератор. 392414 Перемножающие блоки и синхронные детекторы выполнены на основе цифрог)налогового преобразователя. Индикаторы величины дисбаланса и угла дисбаланса выполнены с запоминанием и меняют свои показания только в момент фиксации итоговой метки. Сумматор, нуль-орган и счетчики меток могут быть выполнены по любой ю известной в технике схеме, Устройство работает следующим образом. Раскручивается ротор 4 (фиг,5) с нанесенными на него метками 5 и 6. 15 При прохождении нулевой метки 6 мимо датчика 2 нулевой метки, нп его выходе формируется сигнал, который устанавливает в исходное нулевое состояние счетчики 15 и 17 меток, прсдназ- ?о 'каченные соответственно для подсчета N/4 и N меток. Одновременно сигнал, пропорциональный механическим колебаниям ротора 4, с выхода датчика 1 дисбаланса 25 поступает на входы перемножающих блоков 8 « 9, на другие входы которых поступают напряжения с блока 7 формирования опорных сигналов, меняющиеся по синусоидальному закону и 30 сдвинутые один относительно другого на 90° с частотой, равной частоте вращения ротора 4. Управление блоком 7 формирования опорных сигналов осуществляется сигналами датчика 2 нуле- 3fвой метки и датчика 3 меток угла ротора. Сигналы дисбаланса с выходов перемножающих блоков 8 и 9 поступают на входы соответствующих синхронных детекторов 10 и 11. На другие входы 4 0 синхронных детекторов 10 и 11 поступают сигналы с выходов блока 7 формирования опорных сигналов. Далее сигналы с выходов синхронных детекторов 10 и 11 поступают па входы сумматора 45 12, на выходе которого формируется синусоидальный сигнал оборотной час-тоты, амплитуда которого пропорциональна амплитуде вектора дисбаланса, а фазовая характеристика соответству- ^д ет фазовой характеристике вектора дисбаланса , Этот сигнал поступает на индикатор 19 величины дисбаланса и а нуль-орган 13. На выходе нуль-органа 13 логический сигнал запрещает , 5 5 прохождение импульсов с выхода датчика 3 меток угла ротора через первую схему И 14 на вход первого счетчика 15 меток. Уровень логического сигнала на выходе последнего разрешает прохождение импульсных сигналов через вторую схему Н 16 от датчика 3 меток угла ротор.і на вход второго счетчика 17 меток. В тот момент, когда сигнал дисбаланса на выходе сумматора 12 пересекает нулевую ось (фиг.З), на выходе нуль-органа 13 формируется управляющий сигнал, разрешающий прохождение импульсов от датчика 3 меток угла ротора через первую схему И 14 на выход первого счетчика 15 меток, который отсчитывает одновременно с вторым счетчиком 17 меток количество меток, нанесенных на четвертую часть окружности ротора. После того, как счетчик 15 отсчи* тает количество импульсов, равное количеству меток, нанесенных на четвертую часть окружности ротора 4, на его выходе появляется управляющий сигнал, который запрещает прохождение импульсов от датчика 3 меток угла рот тора через вторую схему И 16 на вход второго счетчика 17 меток, который останавливается и на его выходе устанавливается код, соответствующий количеству меток от нулевой до итоговой. В момент, когда происходит оста- • новка второго счетчика Ї7 меток, производится фиксация амплитуды вектора дисбаланса индикатором 19 величины дисбаланса и фазы индикатора 18 угла дисбаланса. При дальнейшем вращении ротора 4 цикл измерения повторяется на каждом следующем обороте. Предлагаемый способ позволяет определить угол (f вектора дисбаланса с погрешностью X = - 100%, которая определяется количеством меток, нанесенных на ротор. При нанесении на ротор, например, 4096 меток погрешность определения угла ( вектора дисбаланса не превы/ шает 0,08-0,09°., Кроме того, исключается погрешность довольно сложных вычислений, а также погрешность при измерениях, которая составляет порядка 5-10%. Таким образом, точность определения угла вектора дисбаланса повысилась в 4 - Ю раз, повышение точности определения величины вектора дисбаланса происходит за счет исключения подмены его истинного значения усред 13924 ІД непной неличинойв При этом существенно сокращается время, необходимое для определения параметров вектора дисбаланса в сравнении с известным, , где определение параметров происходит за время, большее одного периода вращения ро тора. Ф о р м у л а и з о б р е т е н и я 10 1. Способ определения параметров вектора дисбаланса роторов, -заключающийся в том, что по окружности ротора наносят равноудаленные метки, 15 одну ит которых принимают ча нулевую, приводят ротор во вращение и о параметрах вектора дисбаланса судят по сигналу с датчика дисбаланса, о т л и ч а ю щ и й с я тем, что, с 20 целью повышения точности, отсчитывают число меток в интервале от нулевой метки до метки, совпадающей с момен* том перехода сигнала с датчика дисбаланса череэ нулевое значение, от этой 25 метки дополнительно отсчитывают четверть общего числа меток для определения итоговой метки, и о фазе дисбаланса судят по положению последней, а об амплитуде по сигналу с дат-30 чика дисбаланса - в момент фиксации итоговой метки. 2. Устройство для определения па-.,, раметров вектора дисбаланса роторов, содержащее опоры для ротора, датчик 35 дисбаланса, два соединенных с ним перемножающих блока, последовательно соединенные нуль-орган и схему И, датчик нулеиой метки и ичмеригель дисбаланса, о т л и ч а ю щ е й с я тем, что, с целью повышения точности, оно снабжено блоком формирования опорных сигналов, вход которого соединен с выходом датчика нулевом метки,а выходы - с вторыми входами перемножающих блоков, сумматором, первым и вторым синхронными детекторами, первые входы которых соединены с выходами соответствующих перемножающих блоков, вторые входы - с соответствующими выходами блока формирования опорных сигналов, а выходы - с входами сумматора, второй схемой И, датчиком меток, выход которого соединен с вторыми входами обеих схем И и блока формирования опорных сигналов, и первым и вторым счетчика" ми меток, первые входы которых соединены с выходами соответствующих схем И, а вторые - с выходом* датчика нулевой метки, а измеритель дисбаланса выполнен в виде индикатора угла дисбаланса и индикатора величины дисбаланса, первые входы которых соединены между собой, с первым входом второй схемы И и с выходом первого счетчика меток, а вторые - соответственно с выходом второго счетчика меток и соединенными между собой выходом сумматора и входом нуль-органа. 3. Устройство по п.2, о т л и ч а ю щ е е с я тем, что датчики дисбаланса, нулевой метки и меток расположены по прямой, параллельной оси опор для ротора. детке А/*/ фі/г.2 фиг. 3 Редактор Л.Повхан Составитель Ю.Круглов Техред М.Дидык Корректор Н.Король Заказ 1804/46 Тираж 847 Подписное В И І Государственного комитета СССР Н ИШ по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д . 4/5 ч Производственно-полиграфическое предприятие, г . Ужгород, ул. Проектная, 4
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of parameters of vector of rotor unbalance and device for its implementation
Автори англійськоюDobrovolskyi Hennadii Heorhiiovych, Yefremov Volodymyr Borysovych, Prylutskyi Valerii Lvovych, Muravskyi Arkadii Mykolaiovych, Savchenko Lidia Mykhailivna
Назва патенту російськоюСпособ определения параметров вектора дисбаланса роторов и устройство для его осуществления
Автори російськоюДобровольский Геннадий Георгиевич, Ефремов Владимир Борисович, Прилуцкий Валерий Львович, Муравский Аркадий Николаевич, Савченко Лидия Михайловна
МПК / Мітки
МПК: G01M 1/22
Мітки: спосіб, роторів, параметрів, визначення, дисбалансу, вектору, здійснення, пристрій
Код посилання
<a href="https://ua.patents.su/6-2744-sposib-viznachennya-parametriv-vektoru-disbalansu-rotoriv-ta-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення параметрів вектору дисбалансу роторів та пристрій для його здійснення</a>
Пристрій для визначення вектора дисбалансу
Номер патенту: 357
Опубліковано: 30.04.1993
Автори: Квашин Михайло Федорович, Цибулько Вадим Йосипович, Гордієнко Анатолій Юхимович, Меншиков Сергій Миколайович
МПК: G01M 1/22
Мітки: визначення, пристрій, дисбалансу, вектора
Формула / Реферат:
Формула изобретения1. Устройство для определения вектора дисбаланса, содержащее последовательно соединенные датчик вибрации, перемножитель и интегратор синфазной компоненты, выход которого предназначен для соединения с указателем величины дисбаланса, умножитель частоты импульсов, последовательно соединенные второй перемножитель, вход которого соединен с выходом датчика дисбаланса, и интегратор квадратурной компоненты, формирователи...
Пристрій для визначення параметрів вектора дісбалансу
Номер патенту: 1159
Опубліковано: 30.12.1993
Автори: Квашин Михайло Федорович, Грязєв Генадій Васильович, Цибулько Вадим Йосипович, Бруднер Олександр Ілліч, Меншиков Сергій Миколайович
МПК: G01M 1/22
Мітки: вектора, дисбалансу, пристрій, визначення, параметрів
Формула / Реферат:
Устройство для определения параметров вектора дисбаланса, содержащее бесконтактный датчик дисбаланса, блок формирования: синусоидальных ортогональных опорных сигналов, связанные с ними два умножителя, два синхронных детектора, связанный с их вторы ми входами квадратурный синусоидальный генератор, индикатор величины дисбаланса, фазометр и сумматор, входы которого соединены с синхронными детекторами, а выход - с индикатором величины дисбаланса...
Пристрій для визначення вектора дісбалансу
Номер патенту: 1158
Опубліковано: 30.12.1993
Автори: Меншиков Сергій Миколайович, Цибулько Вадим Йосипович, Квашин Михайло Федорович, Грязєв Генадій Васильович
МПК: G01M 1/22
Мітки: вектора, дисбалансу, визначення, пристрій
Формула / Реферат:
(57) 1. Устройство для определения вектора дисбаланса, содержавшее последовательно соединенные датчик дисбаланса, синхронный детектор, выход которого предназначен для соединения с указателем величины дисбаланса, источник опорного напряжения, вход которого соединен с датчиком дисбаланса, и импульсную лампу, предназначенную для указания места дисбаланса на роторе, отличающееся тем, что, с целью повышения производительности балансировки,...
Пристрій для вимірювання фазового зсуву
Номер патенту: 457
Опубліковано: 30.04.1993
Автори: Свідлер Ігор Давидович, Токовенко Степан Омелянович
МПК: G01R 25/00
Мітки: вимірювання, фазового, зсуву, пристрій
Формула / Реферат:
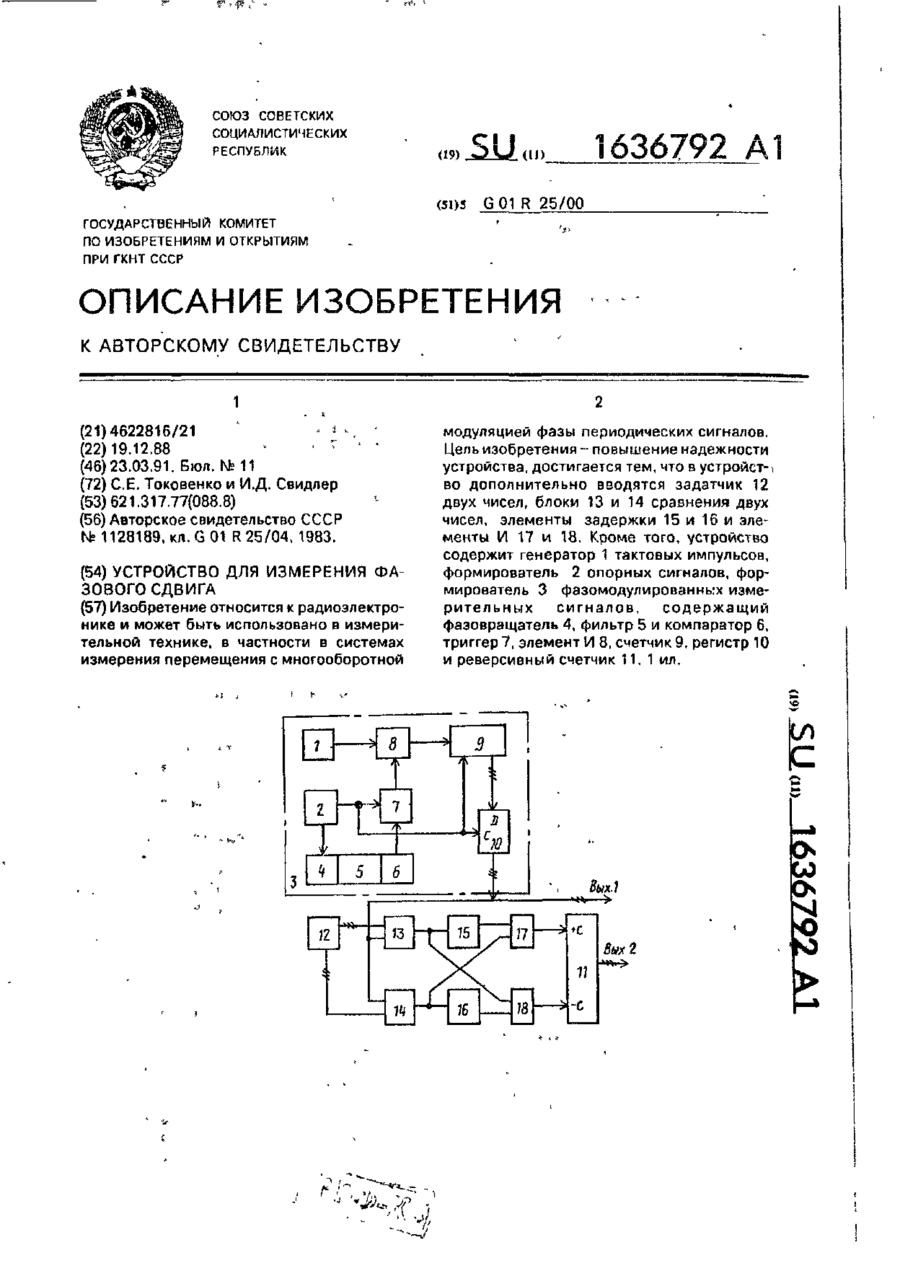
Формула изобретенияУстройство для измерения фазового сдвига, содержащее триггерный фазометр, выход которого является первым выходом устройства и реверсивный счетчик, выход которого является вторым выходом устройства, отличающееся тем, что, с целью повышения надежности устройства, в него дополнительно введены задатчик двух чисел, два блока сравнения двух чисел, два элемента задержки и два элемента И, причем выход триггерного фазометра...
Спосіб визначення активної потужності в трьохфазному ланцюгу і пристрій для його втілення
Номер патенту: 2060
Опубліковано: 20.12.1994
Автор: Кизилов Володимир Улянович
МПК: G01R 21/06
Мітки: потужності, ланцюгу, втілення, пристрій, трьохфазному, спосіб, визначення, активної
Формула / Реферат:
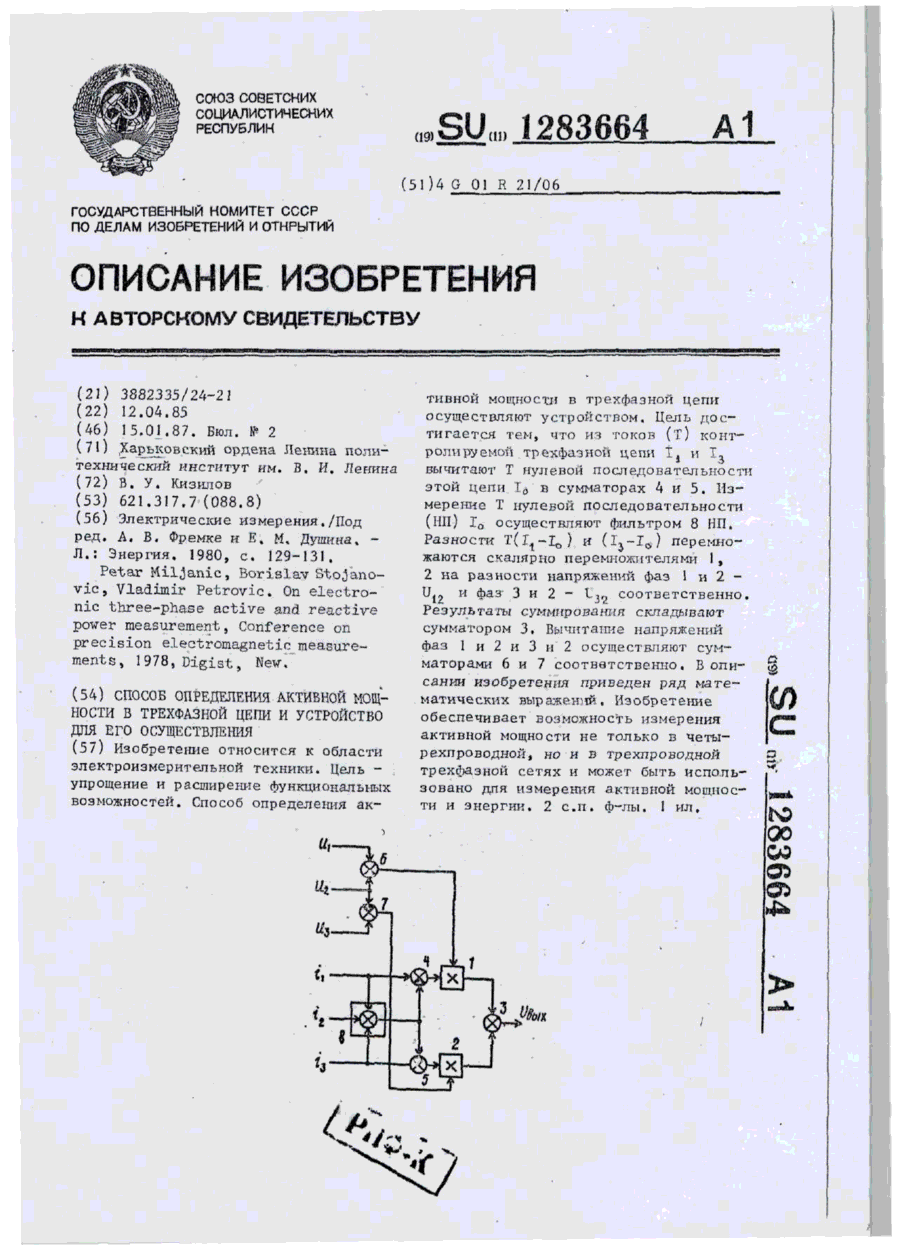
1. Способ определения активной мощности в трехфазной цепи, состоящий в измерении токов двух фаз и двух междуфазных напряжений, например между первой и второй и между третьей и второй фазами, перемножении значений этих напряжений на значения токов первой и третьей фаз соответственно и суммировании результатов перемножений, отличающийся тем, что, с целью упрощения и расширения функциональных возможностей, измеряют ток нулевой...
Попередній патент: Широкополосний підсилювач
Наступний патент: Спосіб визначення дисбалансу роторів та пристрій для його здійснення
Випадковий патент: Композиція на основі диклофенаку для місцевого лікування захворювань ротоглотки