Трикомпонентний акселерометр
Номер патенту: 15499
Опубліковано: 30.06.1997
Автори: Збруцький Олександр Васильович, Балабанов Ігор Валерійович, Лопушенко Віктор Констянтинович, Кабаков Дмитро Вікторович, Черняк Микола Григорович
Формула / Реферат
1. Трехкомпонентный акселерометр, включающий корпус, внутри которого размещена инерционная масса и ножка с закрепленными на ней двумя датчиками деформации в виде пластин с электродами, отличающийся тем, что дополнительно содержит третий датчик деформации, корпус выполнен цилиндрическим, инерционная масса - в виде диска, а ножка выполнена призматической и установлена в центре корпуса, причем на ней дополнительно закреплен третий датчик таким образом, что плоскости всех датчиков перпендикулярны торцу инерционной массы и расположены на гранях ножки под углом 60 градусов относительно друг друга.
2. Трехкомпонентный акселерометр по п.1, отличающийся тем, что датчики деформации выполнены на основе эффекта поверхностно-акустических волн.
Текст
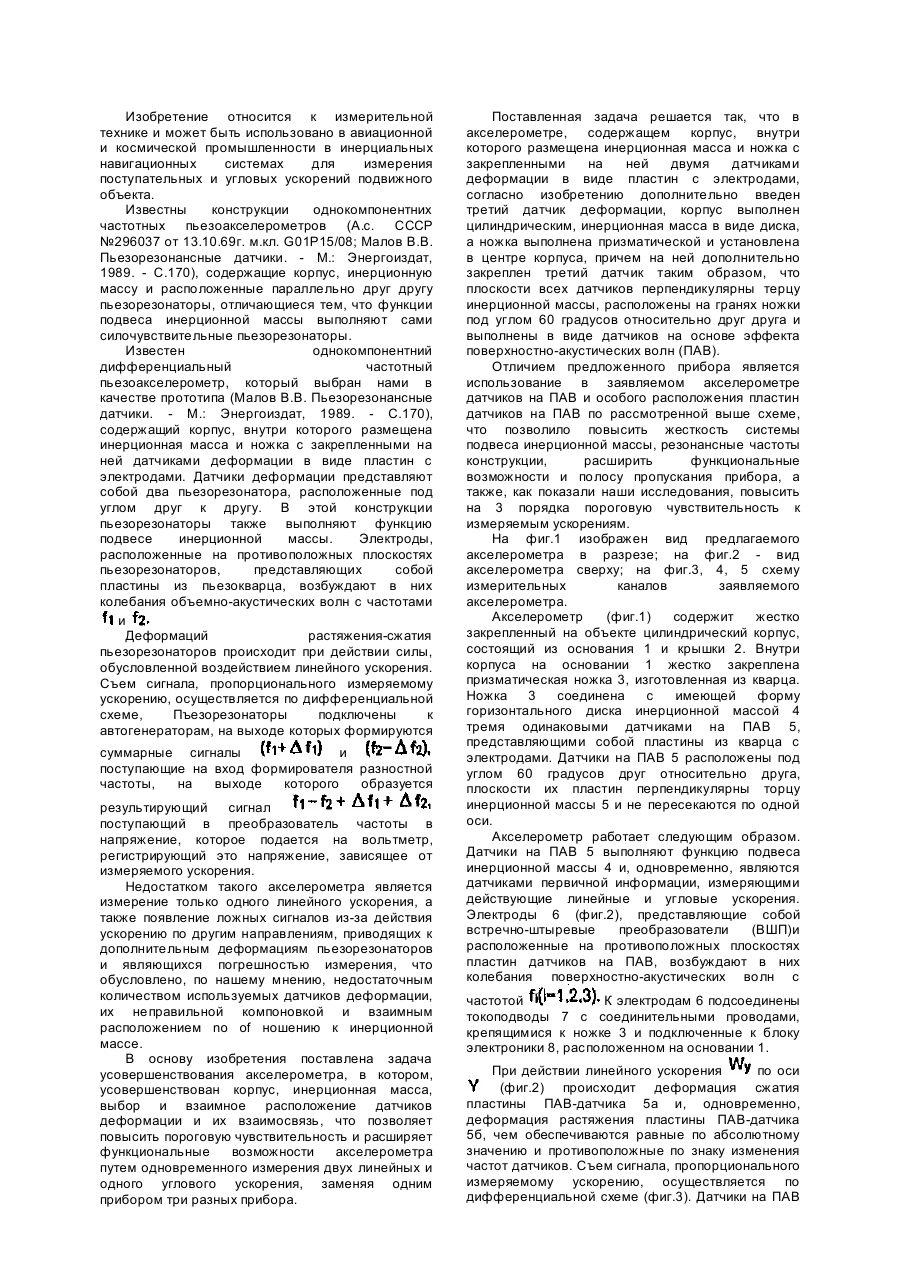
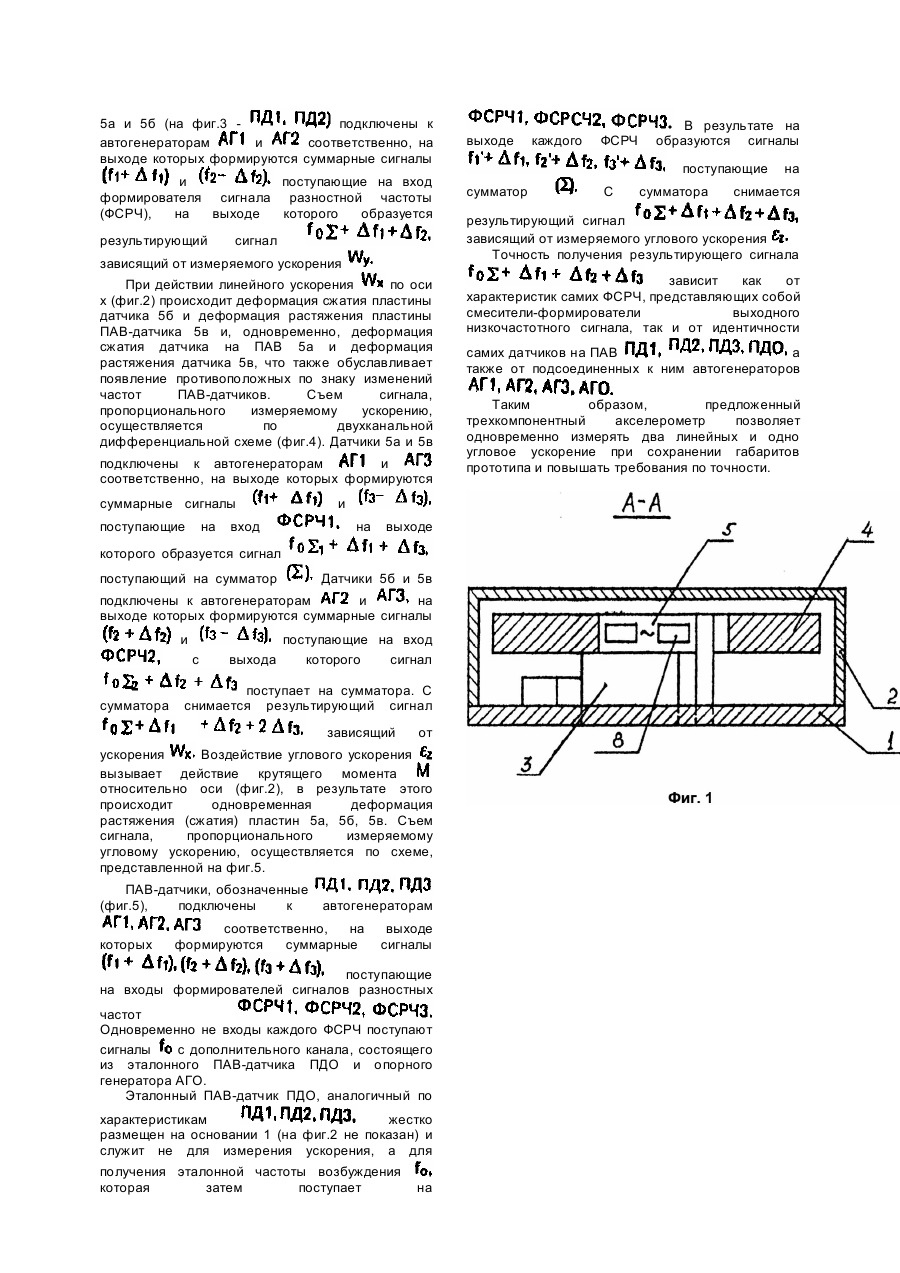
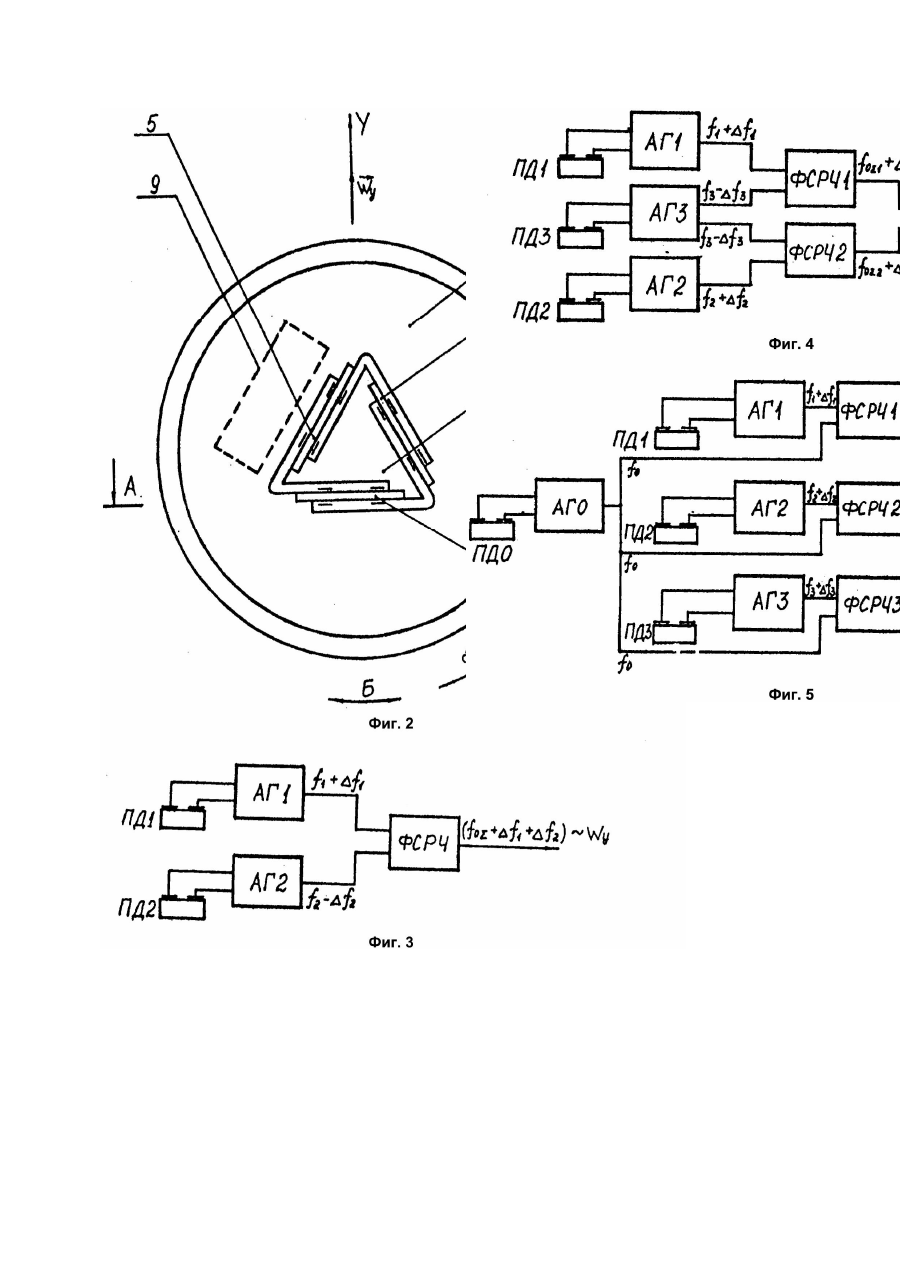
Изобретение относится к измерительной технике и может быть использовано в авиационной и космической промышленности в инерциальных навигационных системах для измерения поступательных и угловых ускорений подвижного объекта. Известны конструкции однокомпонентних частотных пьезоакселерометров (А.с. СССР №296037 от 13.10.69г. м.кл. G01P15/08; Малов В.В. Пьезорезонансные датчики. - М.: Энергоиздат, 1989. - С.170), содержащие корпус, инерционную массу и расположенные параллельно друг другу пьезорезонаторы, отличающиеся тем, что функции подвеса инерционной массы выполняют сами силочувствительные пьезорезонаторы. Известен однокомпонентний дифференциальный частотный пьезоакселерометр, который выбран нами в качестве прототипа (Малов В.В. Пьезорезонансные датчики. - М.: Энергоиздат, 1989. - С.170), содержащий корпус, внутри которого размещена инерционная масса и ножка с закрепленными на ней датчиками деформации в виде пластин с электродами. Датчики деформации представляют собой два пьезорезонатора, расположенные под углом друг к другу. В этой конструкции пьезорезонаторы также выполняют функцию подвесе инерционной массы. Электроды, расположенные на противоположных плоскостях пьезорезонаторов, представляющих собой пластины из пьезокварца, возбуждают в них колебания объемно-акустических волн с частотами и Деформаций растяжения-сжатия пьезорезонаторов происходит при действии силы, обусловленной воздействием линейного ускорения. Съем сигнала, пропорционального измеряемому ускорению, осуществляется по дифференциальной схеме, Пъезорезонаторы подключены к автогенераторам, на выходе которых формируются суммарные сигналы и поступающие на вход формирователя разностной частоты, на выходе которого образуется результирующий сигнал поступающий в преобразователь частоты в напряжение, которое подается на вольтметр, регистрирующий это напряжение, зависящее от измеряемого ускорения. Недостатком такого акселерометра является измерение только одного линейного ускорения, а также появление ложных сигналов из-за действия ускорению по другим направлениям, приводящих к дополнительным деформациям пьезорезонаторов и являющихся погрешностью измерения, что обусловлено, по нашему мнению, недостаточным количеством используемых датчиков деформации, их неправильной компоновкой и взаимным расположением no of ношению к инерционной массе. В основу изобретения поставлена задача усовершенствования акселерометра, в котором, усовершенствован корпус, инерционная масса, выбор и взаимное расположение датчиков деформации и их взаимосвязь, что позволяет повысить пороговую чувствительность и расширяет функциональные возможности акселерометра путем одновременного измерения двух линейных и одного углового ускорения, заменяя одним прибором три разных прибора. Поставленная задача решается так, что в акселерометре, содержащем корпус, внутри которого размещена инерционная масса и ножка с закрепленными на ней двумя датчиками деформации в виде пластин с электродами, согласно изобретению дополнительно введен третий датчик деформации, корпус выполнен цилиндрическим, инерционная масса в виде диска, а ножка выполнена призматической и установлена в центре корпуса, причем на ней дополнительно закреплен третий датчик таким образом, что плоскости всех датчиков перпендикулярны терцу инерционной массы, расположены на гранях ножки под углом 60 градусов относительно друг друга и выполнены в виде датчиков на основе эффекта поверхностно-акустических волн (ПАВ). Отличием предложенного прибора является использование в заявляемом акселерометре датчиков на ПАВ и особого расположения пластин датчиков на ПАВ по рассмотренной выше схеме, что позволило повысить жесткость системы подвеса инерционной массы, резонансные частоты конструкции, расширить функциональные возможности и полосу пропускания прибора, а также, как показали наши исследования, повысить на 3 порядка пороговую чувствительность к измеряемым ускорениям. На фиг.1 изображен вид предлагаемого акселерометра в разрезе; на фиг.2 - вид акселерометра сверху; на фиг.3, 4, 5 схему измерительных каналов заявляемого акселерометра. Акселерометр (фиг.1) содержит жестко закрепленный на объекте цилиндрический корпус, состоящий из основания 1 и крышки 2. Внутри корпуса на основании 1 жестко закреплена призматическая ножка 3, изготовленная из кварца. Ножка 3 соединена с имеющей форму горизонтального диска инерционной массой 4 тремя одинаковыми датчиками на ПАВ 5, представляющими собой пластины из кварца с электродами. Датчики на ПАВ 5 расположены под углом 60 градусов друг относительно друга, плоскости их пластин перпендикулярны торцу инерционной массы 5 и не пересекаются по одной оси. Акселерометр работает следующим образом. Датчики на ПАВ 5 выполняют функцию подвеса инерционной массы 4 и, одновременно, являются датчиками первичной информации, измеряющими действующие линейные и угловые ускорения. Электроды 6 (фиг.2), представляющие собой встречно-штыревые преобразователи (ВШП)и расположенные на противоположных плоскостях пластин датчиков на ПАВ, возбуждают в них колебания поверхностно-акустических волн с частотой К электродам 6 подсоединены токоподводы 7 с соединительными проводами, крепящимися к ножке 3 и подключенные к блоку электроники 8, расположенном на основании 1. При действии линейного ускорения по оси (фиг.2) происходит деформация сжатия пластины ПАВ-датчика 5а и, одновременно, деформация растяжения пластины ПАВ-датчика 5б, чем обеспечиваются равные по абсолютному значению и противоположные по знаку изменения частот датчиков. Съем сигнала, пропорционального измеряемому ускорению, осуществляется по дифференциальной схеме (фиг.3). Датчики на ПАВ 5а и 5б (на фиг.3 подключены к автогенераторам и соответственно, на выходе которых формируются суммарные сигналы выходе и поступающие на вход формирователя сигнала разностной частоты (ФСРЧ), на выходе которого образуется сумматор результирующий сигнал зависящий от измеряемого ускорения При действии линейного ускорения по оси x (фиг.2) происходит деформация сжатия пластины датчика 5б и деформация растяжения пластины ПАВ-датчика 5в и, одновременно, деформация сжатия датчика на ПАВ 5а и деформация растяжения датчика 5в, что также обуславливает появление противоположных по знаку изменений частот ПАВ-датчиков. Съем сигнала, пропорционального измеряемому ускорению, осуществляется по двухканальной дифференциальной схеме (фиг.4). Датчики 5а и 5в подключены к автогенераторам и соответственно, на выходе которых формируются суммарные сигналы поступающие на и вход на выходе которого образуется сигнал поступающий на сумматор Датчики 5б и 5в подключены к автогенераторам и на выходе которых формируются суммарные сигналы и с сумматора выхода поступающие на вход которого сигнал поступает на сумматора. С снимается результирующий сигнал зависящий от ускорения Воздействие углового ускорения вызывает действие крутящего момента относительно оси (фиг.2), в результате этого происходит одновременная деформация растяжения (сжатия) пластин 5а, 5б, 5в. Съем сигнала, пропорционального измеряемому угловому ускорению, осуществляется по схеме, представленной на фиг.5. ПАВ-датчики, обозначенные (фиг.5), подключены к которых автогенераторам соответственно, на формируются суммарные выходе сигналы поступающие на входы формирователей сигналов разностных частот Одновременно не входы каждого ФСРЧ поступают сигналы с дополнительного канала, состоящего из эталонного ПАВ-датчика ПДО и опорного генератора АГО. Эталонный ПАВ-датчик ПДО, аналогичный по характеристикам жестко размещен на основании 1 (на фиг.2 не показан) и служит не для измерения ускорения, а для получения эталонной частоты возбуждения которая затем поступает на каждого ФСРЧ В результате на образуются сигналы поступающие С сумматора на снимается результирующий сигнал зависящий от измеряемого углового ускорения Точность получения результирующего сигнала зависит как от характеристик самих ФСРЧ, представляющих собой смесители-формирователи выходного низкочастотного сигнала, так и от идентичности самих датчиков на ПАВ а также от подсоединенных к ним автогенераторов Таким образом, предложенный трехкомпонентный акселерометр позволяет одновременно измерять два линейных и одно угловое ускорение при сохранении габаритов прототипа и повышать требования по точности.
ДивитисяДодаткова інформація
Назва патенту англійськоюThree-component accelerometer
Автори англійськоюBalabanov Ihor Valeriiovych, Zbrutskyi Oleksandr Vasyliovych, Kabakov Dmytro Viktorovych, Lopushenko Viktor Kostiantynovych, Cherniak Mykola Hryhorovych
Назва патенту російськоюТрехкомпонентный акселерометр
Автори російськоюБалабанов Игорь Валериевич, Збруцкий Александр Васильевич, Кабаков Дмитрий Викторович, Лопушенко Виктор Константинович, Черняк Николай Григорьевич
МПК / Мітки
МПК: G01P 15/08
Мітки: трикомпонентний, акселерометр
Код посилання
<a href="https://ua.patents.su/3-15499-trikomponentnijj-akselerometr.html" target="_blank" rel="follow" title="База патентів України">Трикомпонентний акселерометр</a>
Вимірювач прискорення
Номер патенту: 15252
Опубліковано: 30.06.1997
Автори: Кабаков Дмитро Вікторович, Балабанов Ігор Валерійович, Збруцький Олександр Васильович
МПК: B81B 7/00
Мітки: вимірювач, прискорення
Формула / Реферат:
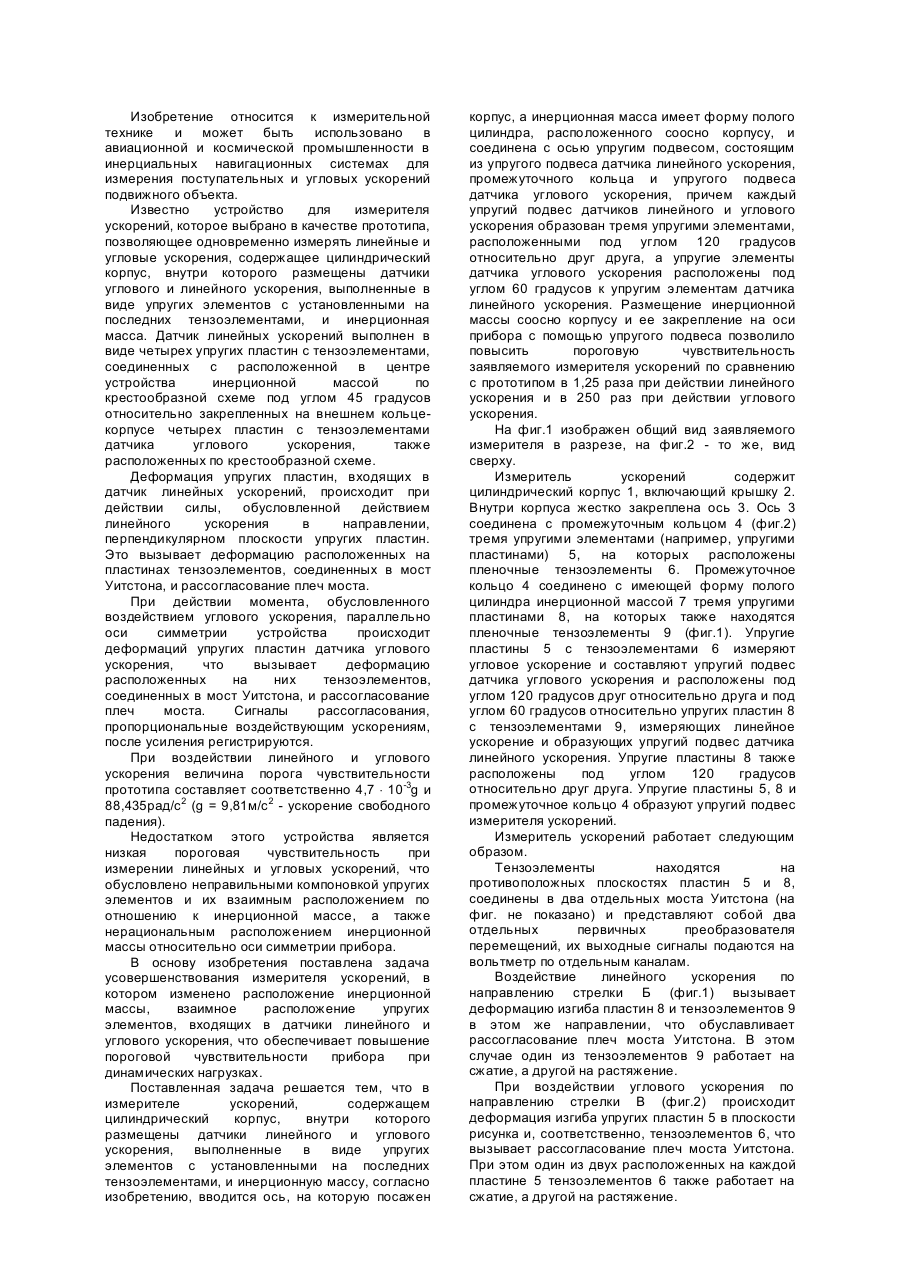
Измеритель ускорения, содержащий цилиндрический корпус, внутри которого размещены датчики углового и линейного ускорения, выполненные в виде упругих элементов с установленными на последних тензоэлементами, и инерционную массу, отличающийся тем, что он снабжен осью, на которую посажен корпус, а инерционная масса имеет форму полого цилиндра, расположенного соосно корпусу, и соединена с осью упругим подвесом, включающим упругие подвесы датчиков...
Подільский акселерометр лінійного прискорення
Номер патенту: 2641
Опубліковано: 26.12.1994
Автори: Музичук Федір Максимович, Музичук Антон Максимович
МПК: G01P 15/18
Мітки: акселерометр, лінійного, прискорення, подільский
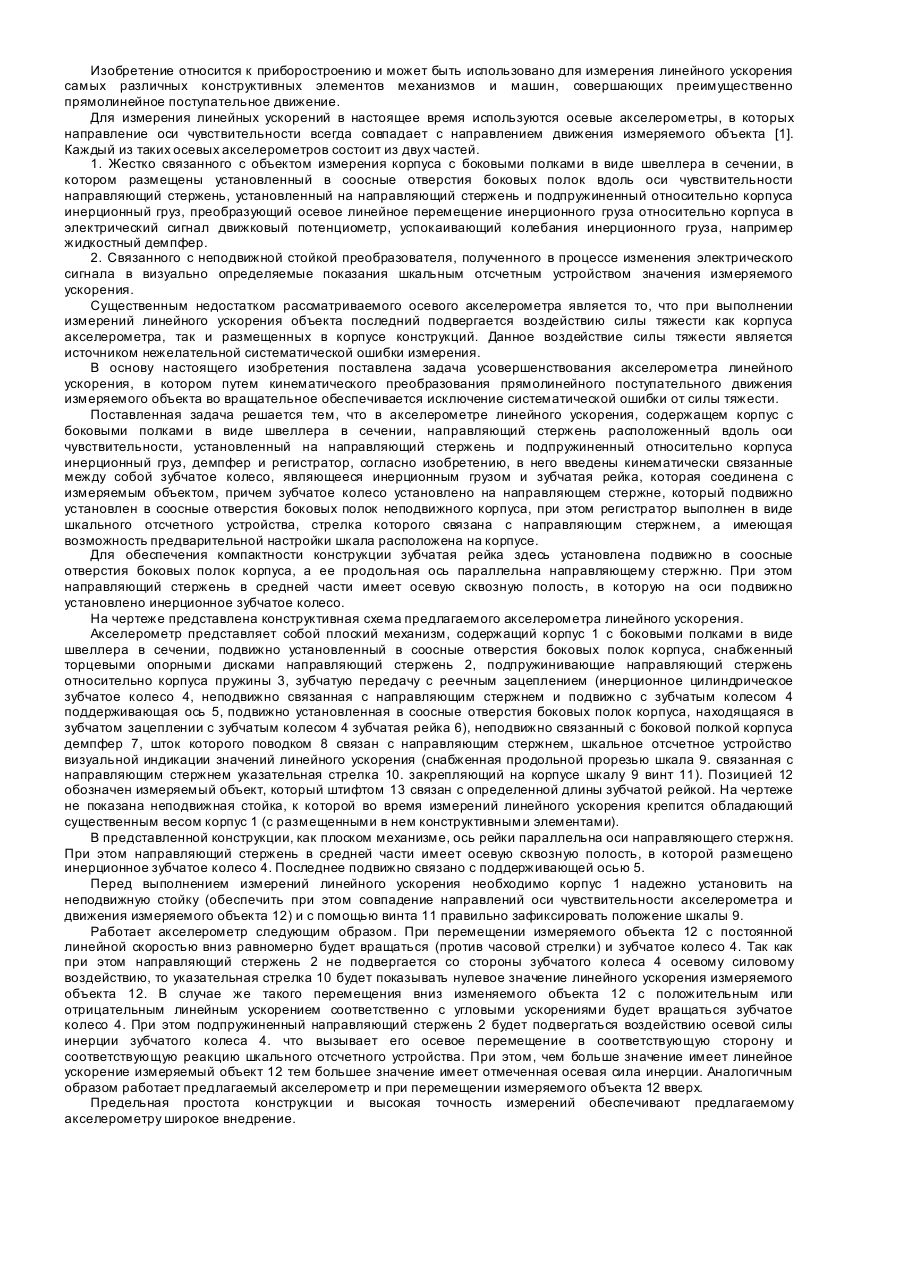
Формула / Реферат:
1. Подольский акселерометр линейного ускорения, содержащий корпус с боковыми полками в виде швеллера в сечении, направляющий стержень, расположенный вдоль оси чувствительности, установленный на направляющий стержень и подпружиненный относительно корпуса инерционный груз, демпфер и регистратор, отличающийся тем, что в него введены кинематически связанные между собой зубчатое колесо, являющееся инерционным грузом и зубчатая рейка, которая...
Вібропобудник
Номер патенту: 4361
Опубліковано: 27.12.1994
Автори: Шевчук Віктор Іванович, Гончаров Євген Сергійович, Прилуцький Анатолій Назарович
МПК: B06B 1/10
Мітки: вібропобудник
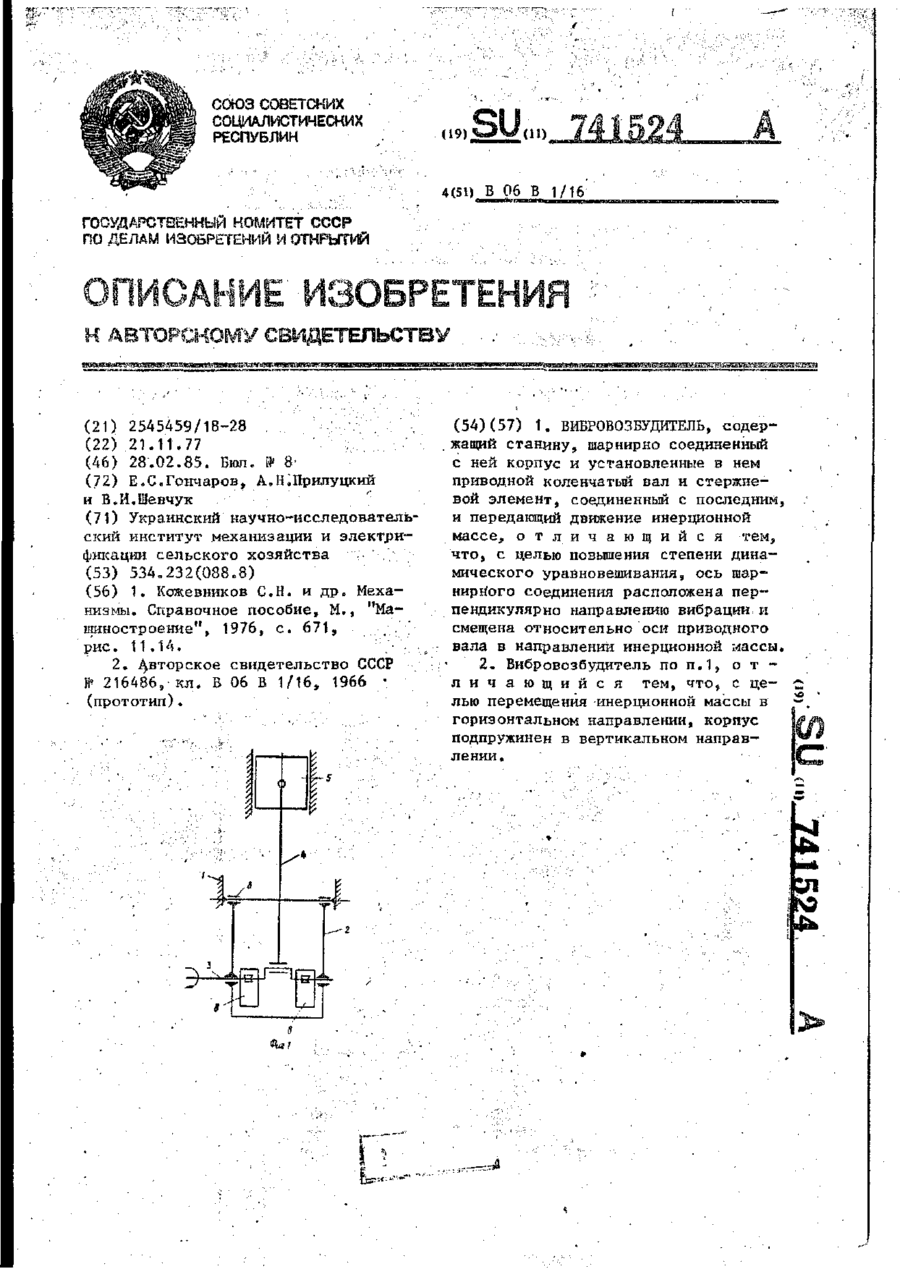
Формула / Реферат:
1. Вибровозбудитель, содержащий станину, шарнирно соединенный с ней корпус и установленные в нем приводной коленчатый вали стержневой элемент, соединенный с последним, и передающий движение инерционной массе, отличающийся тем, что, с целью повышения степени динамического уравновешивания, ось шарнирного соединения расположена перпендикулярно направлению вибрации и смещена относительно оси приводного вала в направлении инерционной массы....
Пристрій для визначення ккд насосів
Номер патенту: 10511
Опубліковано: 25.12.1996
Автори: Тертишна Олена Тимофіївна, Шевчук Степан Прокопович, Діденко Віктор Мойсейович
МПК: F04B 51/00
Мітки: пристрій, визначення, ккд, насосів
Формула / Реферат:
Устройство для определения КПД насосов, содержащее перепускной канал с дросселем и полыми датчиками теплового потока на концевых участках, установленными с радиальными заходами в подводящем и напорном трубопроводах насоса, блок вычисления, блок индикации и датчик температуры рабочей среды на выходе насоса, при этом воды блока вычисления соединены с датчиком теплового потока на входе насоса и датчиком температуры рабочей среды, а выход - с...
Пристрій для лічіння предметів, що рухаються
Номер патенту: 4082
Опубліковано: 27.12.1994
Автори: Панов Віктор Михайлович, Садкін Вечеслав Валерійович, Уманчик Микола Іванович, Сидоренко Микола Федорович
МПК: G06M 7/00
Мітки: предметів, лічіння, рухаються, пристрій
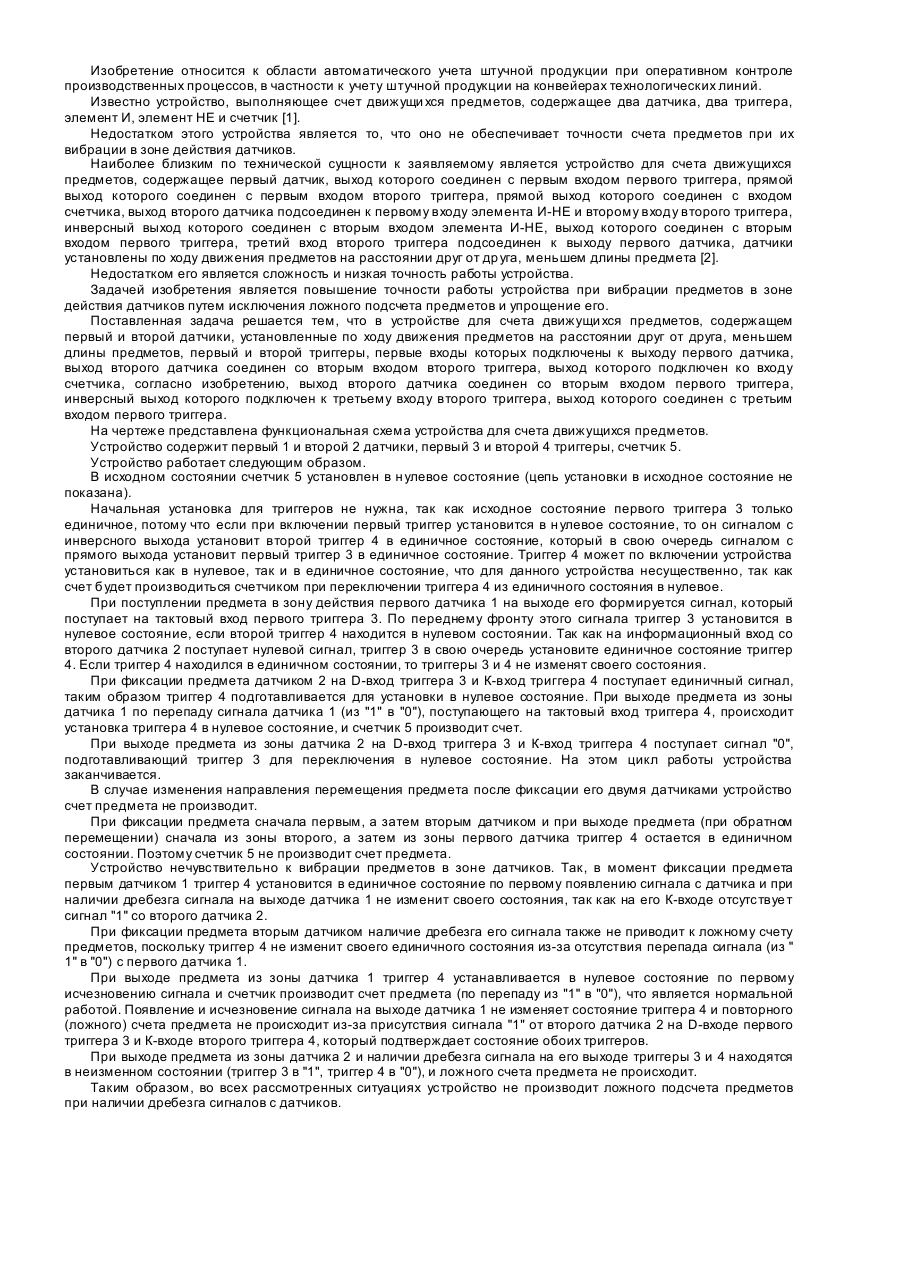
Формула / Реферат:
Устройство для счета движущихся предметов, содержащее первый и второй датчики, установленные по ходу движения предметов на расстоянии друг от друга, меньшем длины предметов, первый и второй триггеры, первые входы которых подключены к выходу первого датчика, выход второго датчика соединен со вторым входом второго триггера, выход которого подключен ко входу счетчика, отличающееся тем, что выход второго датчика соединен со вторым входом первого...
Попередній патент: Двигун внутрішнього згоряння-генератор електричного струму
Наступний патент: Спосіб отримання фільтруючого порошку з трепелу
Випадковий патент: Довгоходовий вузол поглинаючого апарата фрикційного типу (варіанти)