Бортовий секвентний радіолокатор для виявлення підземних об’єктів
Формула / Реферат
Бортовой секвентный радиолокатор для обнаружения подземных объектов, содержащий антенную систему из двух одинаковых антенн, антенный переключатель, передатчик видеоимпульсов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что антенная система выполнена из двух приемо-передающих антенн вертикальной поляризации, оси антенн направлены в противоположные стороны от вертикали под углом в полтора раза больше ширины диаграммы направленности антенны, обе антенны связаны с передатчиком при передаче через антенный переключатель параллельно с одинаковой полярностью, а при приеме через тот же переключатель связаны с приемником последовательно с противоположной полярностью, на выходе приемника включены параллельно два диода противоположной полярности, один из которых связан с индикатором сигналов первой антенны, а другой - с индикатором сигналов второй антенны.
Текст
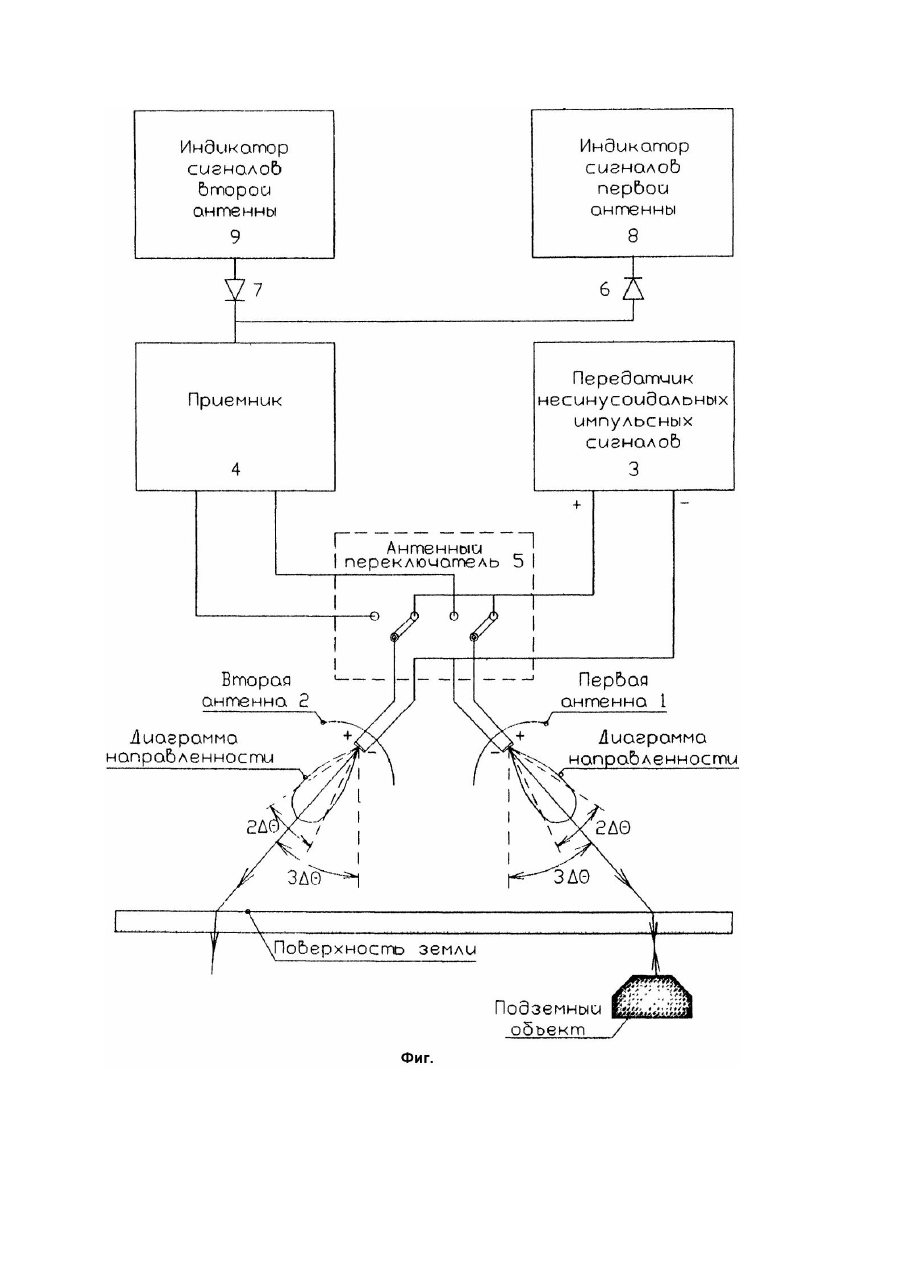
Изобретение относится к области радиолокации и может быть использовано в бортовых секвентных радиолокаторах с зондирующим сигналом в виде наносекундных видеоимпульсов без несущей частоты для обнаружения подземных объектов на фоне пассивных помех от земной поверхности. Известен вертолетный радиолокатор подповерхностного зондирования [1, с.42, 43, рис.1.6.9]. Бортовая приемо-передающая антенна этого радиолокатора направлена вертикально вниз и излучает зондирующий сигнал в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты. В состав этого аналога входят следующие основные элементы: бортовая приемо-передающая антенна с антенным переключателем для переключения антенны с передачи на прием; передатчик видеоимпульсных сигналов; приемник в виде широкополосного усилителя видеоимпульсов и индикатор для наблюдения эхосигналов от подповерхностных объектов. Этот аналог позволяет обнаруживать подземные объекты и определять глубину их залегания по измерениям времени запаздывания эхо-сигналов от эти х объектов. Недостатком аналога является то, что пассивные помехи от земной поверхности мешают работе радиолокатора и затрудняют обнаружение подземных объектов на малой глубине залегания. В качестве прототипа выбран вертолетный радиолокатор подповерхностного зондирования с двумя разнесенными антенными [1]. Антенная система прототипа состоит из двух одинаковых разнесенных по горизонтали антенн, оси которых направлены вертикальной вниз. Одна из антенн является приемопередающей и переключается с передачи на прием с помощью антенного переключателя, а другая антенна работает только на прием. В состав прототипа входят также передатчик видеоимпульсов наносекундной длительности без несущей частоты, приемник и индикатор для наблюдения эхо-сигналов от подземных объектов. Прототип позволяет обнаруживать подземные объекты, измерять глубину и х залегания в земле, а также определять скорость распространения радиоволн в земле и электрические параметры поверхностного слоя земли. Определение этих параметров основано на измерении времени запаздывания видеоимпульсов эхо-сигналов подземного объекта в двух разнесенных антеннах относительно зондирующего видеоимпульса при известной высоте полета. Недостатком прототипа является то, что работе радиолокатора мешают пассивные помехи от земной поверхности, которые затрудняют обнаружение объекта на малой глубине залегания в земле. В основу изобретения поставлена задача усовершенствования бортового секвентного радиолокатора для обнаружения подземных объектов, в котором за счет выполнения антенной системы из двух приемопередающих антенн, оси которых отклонены от вертикали в противоположные стороны на одинаковый угол и вычитания сигналов этих антенн на входе приемника обеспечивается подавление пассивных помех от земной поверхности и выделение эхо-сигналов подземных объектов на индикаторах. Поставленная задача решается тем, что в бортовом секвентном радиолокаторе для обнаружения подземных объектов, содержащем антенную систему из двух одинаковых антенн, антенный переключатель, передатчик видеоимпульсов наносекундной длительностью без несущей частоты, приемник и индикатор, согласно изобретению, антенная система выполнена из двух приемо-передающих антенн вертикальной поляризации, оси антенны направлены в противоположные стороны от вертикали под углом в полтора раза больше ширины диаграммы направленности антенны, обе антенны связаны с передатчиком при передаче через антенный переключатель параллельно с одинаковой полярностью, а при приеме через тот же переключатель связаны с приемником последовательно с противоположной полярностью, на выходе приемника включены параллельно два диода противоположной полярности, один из которых связан с индикатором сигналов первой антенны, а другой - с индикатором сигналов второй антенны. При этом разнос антенн по горизонтали не имеет существенного значения и выбирается из удобства размещения антенной системы на борту летательного аппарата. Полагается также, что электрические параметры поверхностного слоя земли приближенно известны, а предложенное устройство не предназначено для определения этих параметров. Выполнение антенной системы предложенного устройства из двух приемо-передающих антенн, оси которых отклонены от вертикали в противоположные стороны на одинаковый угол и вычитание сигналов этих антенн на входе приемника обеспечивается подавление пассивных помех от земной поверхности и существенно улучшает помехозащищенность бортового секвентного радиолокатора от таких помех. Техническая сущность и принцип действия предложенного устройства поясняются рисунком на фиг., где представлена упрощенная структурная схема бортового секвентного радиолокатора, условно показана бортовая антенная система из двух приемо-передающих антенн, диаграммы направленности этих антенн, земная поверхность и подземный объект. В состав предложенного устройства на схеме фиг.1 входят следующие основные элементы: - первая приемо-передающая антенна 1, диаграмма направленности которой в вертикальной плоскости равна 2Dq, а ось антенны отклонена вправо от вертикали на угол 3Dq; - вторая приемо-передающая антенна 2, идентичная первой антенне, но ось которой отклонена на такой же угол влево от вертикали (обе антенны изучают вертикально поляризованные радиоволны); - передатчик 3 несинусоидальных импульсных сигналов в виде наносекундных видеоимпульсов без несущей часто ты; - приемник 4 в виде широкополосного усилителя видеоимпульсов; - антенный переключатель 5, связывающий обе антенны с передатчиком 3 при передаче параллельно с одинаковой полярностью и с приемником 4 при приеме последовательно с противоположной полярностью; - широкополосные высокочастотные диоды 6, 7, подключенные к выходу приемника 4 параллельно в противоположной полярности включения диодов (эти диоды разделяют принятые первой антенной положительные видеоимпульсы эхо-сигналов подземных объектов от отрицательных видеоимпульсов эхосигналов, принятых второй антенной); - индикатор 8 эхо-сигналов первой антенны; - индикатор 9 эхо-сигналов второй антенны. Ниже поясняется принцип действия предложенного устройства и обосновываются его существенные отличительные признаки. Пассивные помехи от земли возникают из-за обратного рассеяния радиоволн неровностями земной поверхности. Таких неровностей обычно очень много и их средние статистические характеристики примерно одинаковы справа и слева от борта. Поэтому пассивные помехи, приходящие справа к первой антенне и слева ко второй антенне, будут примерно одинаковыми. Предлагается использовать пассивные помехи первой антенны для подавления пассивных помех, принятых второй антенной. Для этого выходы антенн 1, 2 подключают к приемнику 4 с помощью антенного переключателя 5 последовательно с противоположной полярностью, а при передаче - к передатчику 3 параллельно с одинаковой полярностью. Такое техническое решение позволяет подавить пассивные помехи от земли в приемнике 4. При этом эхосигналы от подземных объектов не будут подавляться в приемнике, так как подземные объекты справа и слева от борта расположены на различных расстояниях и на разной глубине, а видеоимпульсы эхосигналов от них придут к антеннам в разное время. Исключение составляет редкий случай, когда два одинаковых подземных объектов расположены справа и слева от борта на одинаковых расстояниях и одинаковой глубине. На выходе приемника 4 видеоимпульсы эхо-сигналов, принятых от подземных объектов первой и второй антеннами, будут иметь противоположную полярность. Это позволяет разделить друг от друга видеоимпульсы эхо-сигналов с помощью широкополосных диодов 6, 7, подключенных к выходу приемника параллельно с противоположной полярностью включения, и наблюдать эхо-сигналы первой и второй антенн раздельно на разных индикаторах 8, 9. Использование в предложенном устройстве радиоволн вертикальной поляризации требуется потому, что при наклонном зондировании радиоволны вертикальной поляризации проникают в землю лучше, чем горизонтально поляризованные радиоволны. Антенная система предложенной конструкции не излучает вертикально вниз. При большом угле отклонения от вертикали оси антенны эхо-сигнал от подземного объекта будет очень слаб, так как большая часть энергии радиоволн отразится от земли в зеркальном направлении и радиоволны почти не будут проникать в землю. Поэтому в предложенной системе существует оптимальный угол отклонения осей антенны от вертикали, при котором эхо-сигнал подземного объекта будет максимальным. Проведенные расчеты показали, что этот оптимальный угол отклонения в полтора раза больше угломесной ширины диаграммы направленности антенны по половинной мощности и составляет 3Dq, где 2Dq - ширина диаграммы направленности антенны. Поэтому предлагается отклонять оси антенны 1, 2 от вертикали на угол 3Dq у первой антенны вправо, а у второй - влево. Таким образом, предложенное устройство может быть практически реализовано, а отмеченные выше отличительные признаки являются существенными и принципиально необходимы для реализации этого устройства. Основные элементы предложенного устройства на схеме фиг.1 выполнены следующим образом. Приемо-передающие антенны 1, 2, передатчик 3 и приемник 4 выполнены для излучения и приема наносекундных видеоимпульсных сигналов без несущей частоты. Такие системы могут быть практически реализованы, так как физические основы и принципы их построения известны и описаны в литературе [1]. Приемник 4 представляет широкополосный усилитель видеоимпульсов. Приемо-передающие антенны 1, 2 идентичны и могут быть выполнены, например, в виде зеркальной антенны с параболическим металлическим зеркалом и облучателем в виде короткого проволочного вибратора, запитываемого с концов фидерной линией из коаксиального кабеля. Оси зеркал этих антенн отклонены от вертикали в противоположные стороны на угол 3Dq, который в полтора раза больше ширины диаграммы направленности антенны. Антенный переключатель 5, возможная схема которого показана на чертеже, переключает антенны с передачи на прием. При этом к передатчику облучатели антенн подключены параллельно с одинаковой полярностью, а к приемнику - последовательно в противоположной полярности. Подобный антенный переключатель может быть выполнен, например, на широкополосных твердотельных переключающих элементах. Диоды 6, 7 подключены к выходу приемника 4 параллельно с противоположной включения и должны иметь широкую полосу пропускания. Индикаторы 8, 9 не отличаются от индикатора прототипа. Динамика работы предложенного устройства осуществляется следующим образом Передатчик 3 формирует, а антенны 1, 2 излучают зондирующий сигнал в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты. Пассивные помехи от земли и эхо-сигналы подземных объектов принимаются этими антеннами: первой антенной - справа от борта, а второй антенной - слева от борта. Антенный переключатель 5 при приеме подключает антенны ко входу приемника последовательно с противоположной полярностью. Пассивные помехи от земли, принимаемые первой антенной справа и второй антенной слева от борта, примерно одинаковы. Поэтому эти помехи вычтутся на входе приемника и не попадут в канал приема. Видеоимпульсы эхо-сигналов от подземных объектов справа и слева придут к антеннам 1, 2 в разное время, поэтому эхо-сигналы подземных объектов пройдут в канал приема и будут усилены приемником 4. Эхо-сигналы подземных объектов, 'принятые первой и второй антенной, имеют разную полярность на выходе приемника 4. Широкополосные диоды 6, 7 разделяют положительные и отрицательные видеоимпульсы эхо-сигналов. После этого положительные эхо-сигналы первой антенны наблюдаются на индикаторе 8, отрицательные эхо-сигналы второй антенны - на индикаторе 9. Таким образом, предложенное устройство устраняет отмеченные недостатки аналога и прототипа и обеспечивает подавление пассивных помех от земной поверхности и обнаружение подземных объектов на фоне эти х помех.
ДивитисяДодаткова інформація
Назва патенту англійськоюAirborne sequential radar for reveal of underground objects
Автори англійськоюZhukov Serhii Anatoliiovych
Назва патенту російськоюБортовой секвентный радиолокатор для выявления подземных объектов
Автори російськоюЖуков Сергей Анатольевич
МПК / Мітки
МПК: G01S 17/06
Мітки: радіолокатор, об'єктів, секвентний, підземних, виявлення, бортовий
Код посилання
<a href="https://ua.patents.su/3-17464-bortovijj-sekventnijj-radiolokator-dlya-viyavlennya-pidzemnikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Бортовий секвентний радіолокатор для виявлення підземних об’єктів</a>
Бортовий секвентний радіолокатор виявлення об’єктів поблизу земної поверхні
Номер патенту: 17471
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: виявлення, секвентний, радіолокатор, земної, бортовий, об'єктів, поблизу, поверхні
Формула / Реферат:
Бортовой секвентный радиолокатор обнаружения объектов вблизи земной поверхности, содержащий приемо-передающую антенну с антенным переключателем, приемник и передатчик несинусоидальных сигналов в виде периодических прямоугольных видеоимпульсов наносекундной длительности с высокой частотой следования импульсов отличающийся тем, что на выходе приемника установлен полосовой фильтр с полосой пропускания от нижней частоты равной до верхней...
Бортовий секвентний радіолокатор для виявлення рухомих цілей на поверхні землі
Номер патенту: 17458
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 13/06
Мітки: секвентний, цілей, бортовий, радіолокатор, виявлення, поверхні, землі, рухомих
Формула / Реферат:
Бортовой секвентный радиолокатор для обнаружения движущихся целей на поверхности земли, содержащий приемо-передающую антенну с антенным переключателем, передатчик зондирующих периодических видеоимпульсных сигналов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включены устройство сканирования антенны с датчиком азимута и угла места и гетеродин видеоимпульсных...
Секвентний радіолокатор для виявлення маловисотної цілі
Номер патенту: 17461
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: секвентний, маловисотної, радіолокатор, виявлення, цілі
Формула / Реферат:
Секвентный радиолокатор для обнаружения маловысотной цели, содержащий передатчик видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты, приемо-передающую антенну с антенным переключателем, приемник и индикатор, отличающийся тем, что в состав радиолокатора дополнительно включен наземный пеленгатор бортового источника радиоизлучения цели по углу места q со своей антенной системой, на выходе приемника радиолокатора...
Бортовий радіолокатор підповерхневого зондування з пристроєм захисту від пасивних перешкод
Номер патенту: 17472
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: підповерхневого, зондування, пристроєм, перешкод, радіолокатор, бортовий, захисту, пасивних
Формула / Реферат:
Бортовой радиолокатор подповерхностного зондирования с устройством защиты от пассивных помех, содержащий бортовую приемо-передающую антенну, ось которой направлена вертикально вниз, антенный переключатель, передатчик периодических видеоимпульсов наносекундной длительности без несущей частоты, приемник и индикатор, отличающийся тем, что на выходе приемника установлен широкополосный усилитель видеоимпульсов с входным и выходным устройствами...
Секвентний вимірювач азимуту рухомої цілі з пристроєм захисту від пасивних перешкод
Номер патенту: 17460
Опубліковано: 06.05.1997
Автор: Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: цілі, пасивних, пристроєм, перешкод, вимірювач, рухомої, захисту, секвентний, азимуту
Формула / Реферат:
Секвентный измеритель азимута движущейся цели с устройством защиты от пассивных помех, содержащий разнесенные по горизонтали на расстояние d первую приемо-передающую антенну с антенным переключателем и вторую приемную антенну, первый и второй приемники этих антенн и передатчик периодических видеоимпульсов наносекундной длительности без несущей частоты, отличающийся тем, что на выходах первого и второго приемников установлены соответственно...
Попередній патент: Радіолокатор з несинусоідальним імпульсним сигналом
Наступний патент: Вимірювач швидкості цілі для секвентного радіолокатора
Випадковий патент: Спосіб вибору донорської зони у хворих при реконструкції молочних залоз нижнім поперечним клаптем живота на прямих м'язах