Керований виконавчий пристрій
Номер патенту: 17846
Опубліковано: 16.10.2006
Автори: Бандура Іван Миколайович, Шапіна Наталя Володимирівна, Дибська Ирина Юріївна, Кортунов Вячеслав Іванович
Формула / Реферат
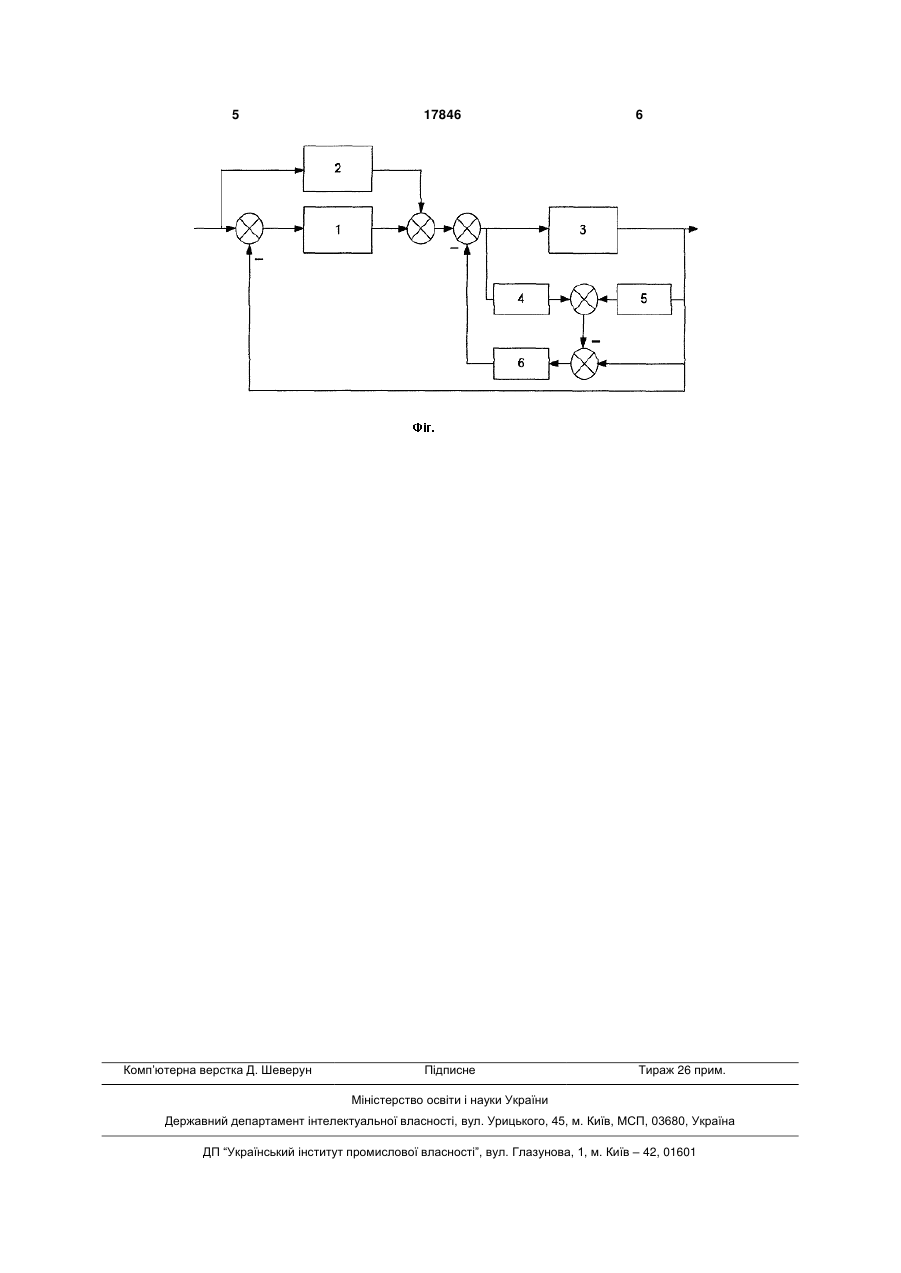
Керований виконавчий пристрій, що містить послідовно з'єднані регулятор і об'єкт керування, вихід якого через третій суматор з'єднаний з входом регулятора спостерігача за станом, спостерігач за виходом й ітераційно-інверсний фільтр, вхід спостерігача за виходом з'єднаний з виходом об'єкта керування, спостерігач за станом і спостерігач за виходом з'єднані між собою четвертим суматором, вихід цих спостерігачів через п'ятий суматор разом з виходом об'єкта керування з'єднані із входом ітераційно-інверсного фільтра, вихід якого підключений до інверсного входу третього суматора, який відрізняється тим, що в нього введений спостерігач за задавальним впливом між входом першого суматора і виходом регулятора.
Текст
Керований виконавчий пристрій, що містить послідовно з'єднані регулятор і об'єкт керування, вихід якого через третій суматор з'єднаний з вхо 3 давальною функцією W2(p), 4 - спостерігач за станом з передавальною функцією Wu(р), 5 - спостерігач за виходом з передавальною функцією Wy(p), 6 - ітераційно-інверсний фільтр з передавальною функцією Wk(p), р - оператор диференціювання. Розглянемо триконтурну слідкуючу систему керування, що показана на фіг. Для стислості запису опустимо оператор р у позначеннях рівнянь. Передатна функція по керуванню від u(t) до y(t) має вигляд W2 Wuy 1 Wk W2 Wk Wu Wk W2 Wy , де Wu, Wy,Wk - коригувальні передатні ланки у відповідності фіг. 1 Wk Wu При виконанні умови інваріантості передатна функція має вигляд Wu Wuy 1 Wy . Отримане рівняння показує інваріантість системи до внутрішніх збурювань, тому що Wuy не залежить від властивостей об'єкта. Ланки Wu, Wy можуть бути представлені через передатну функцію спостерігача стану. 1 Wk Wu Слід зазначити, що умова може бути виконано тільки приблизно. Таким чином, для реалізації інваріантної системи по задаючому впливу не обхідно виконати дві 1 1 Wg p Wk Wuy Wu умови: і , при якому Wg=(1Wy)Wk. Обидві умови потребують інверсії передатних функцій. Одним з методів одержання наближеної інверсної передатної функції є обмежений ряд Неймана: W-1(p) (1+(1-W(p)Kv)+(1-W(p)Kv)2+…+(1-W(p)Kv)n)Kv де Кv=К-1, К - статичний коефіцієнт для W(p). Модель об'єкта приймемо у вигляді B2 (p) K W2 A 2 (p) p Tp 1 , а передатні функції спостерігача стану відповідно B2 (p) L(p) Wu Wy A 2 (p) L(p) A 2 (p) L(p) , Поліном L(p) вибирається з умови бажаного розташування полюсів спостерігача. Для об'єкта 17846 4 приймемо L(p)=l1p+l0 й у такий спосіб передатні функції спостерігача стану мають вид K Wu 2 Tp (l1 1)p l0 , l1p l0 Wy Tp 2 (l1 1)p l0 . 1 Wk Wu Передатну функцію виду запишемо з використанням двох членів розкладання ряду Неймана Wk l0 (2Tp 2 2(l1 1)p l0 ) 2 K(Tp (l1 1)p l0 ) а передатна функція Wg=(l-Wy)Wk відповідно Wg l0 (2Tp 2 2(l1 1)p l0 )p(Tp 1) K(Tp 2 (l1 1)p l0 ) Приймемо передатну функцію регулятора у вигляді W1=1, тоді передатну функцію слідкуючої системи керування помилкою запишемо Wge 1 WgWuy 1 W1Wuy p3 (T2p2 (Tp 2 2 2(l1 1)Tp 2l1 l1 )(Tp 1) (l1 1)p l0 )2 (Tp 2 p K ) . На підставі отриманого вираження можна зробити наступні виводи: - слідкуюча система керування має астатизм третього порядку по задаючому впливі; - астатизм системи забезпечує передатну функцію регулятора (один порядок) і видом додаткового зв'язку по задаючому впливі (два порядки), що відповідає двом членам розкладання інверсної моделі в ряд Неймана. Пристрій працює наступним чином: задаючий сигнал поступає на перший суматор і спостерігач задаючого впливу 2, сигнал з виходу першого суматора через регулятор 1 разом з сигналом з виходу спостерігача 2 поступає на об’єкт керування 3 та на спостерігач за станом 4, сигнал з об'єкта керування 3 поступає на спостерігач за виходом 5 та ітераційно-інверсний фільтр 6. У такий спосіб триконтурна схема інваріантного керування слідкуючою системою на основі ітераційно-інверсних номінальних моделей дозволяє забезпечити необхідний порядок астатизму як по задаючому, так і по збурюючих впливах. Можливість завдання необхідного порядку астатизму дозволяє підвищити точність слідкуючої системи. 5 Комп’ютерна верстка Д. Шеверун 17846 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControlled actuating device
Автори англійськоюDybska Iryna Yuriivna, Bandura Ivan Mykolaiovych
Назва патенту російськоюУправляемое исполнительное устройство
Автори російськоюДибская Ирина Юрьевна, Бандура Иван Николаевич
МПК / Мітки
МПК: G05B 15/02
Мітки: керований, виконавчий, пристрій
Код посилання
<a href="https://ua.patents.su/3-17846-kerovanijj-vikonavchijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Керований виконавчий пристрій</a>
Керований виконавчий пристрій
Номер патенту: 11632
Опубліковано: 16.01.2006
Автори: Казмірук Антон Віталійович, Бандура Іван Миколайович, Лисов Олексій Олександрович, Дибська Ирина Юріївна
МПК: G05B 15/02
Мітки: керований, виконавчий, пристрій
Формула / Реферат:
Керований виконавчий пристрій, що містить послідовно з’єднані регулятор і виконавчий пристрій, вихід якого з’єднаний з інверсним входом першого суматора, до прямого входу якого підключений сигнал потрібного виходу виконавчого пристрою, вихід першого суматора з’єднаний з входом регулятора, який відрізняється тим, що в нього введені спостерігач за станом, спостерігач за виходом і ітераційно-інверсний фільтр, вхід спостерігача за станом...
Виконавчий пристрій інгалятора-дозатора під тиском, виріб з композицією лікувальних аерозольних розчинів, що має такий виконавчий пристрій, та спосіб виготовлення цього пристрою
Номер патенту: 75770
Опубліковано: 15.05.2006
Автори: ендертон Дейвід, Люіс Дейвід Ендрю, Дейвіс Ребекка Джейн, Мікін Брайан Джон
МПК: A61K 9/00, B05B 15/02, A61M 15/00
Мітки: інгалятора-дозатора, розчинів, має, виконавчий, виготовлення, пристрою, спосіб, тиском, пристрій, виріб, лікувальних, аерозольних, цього, композицією
Формула / Реферат:
1. Виконавчий пристрій інгалятора-дозатора під тиском, який має сопловий блок з отвором виконавчого пристрою, що веде до розширювальної камери, який відрізняється тим, що діаметр отвору виконавчого пристрою дорівнює 0,10-0,20 мм по всій довжині отвору, а довжина отвору становить 0,60-1,00 мм. 2. Виконавчий пристрій за п. 1, який відрізняється тим, що діаметр його отвору дорівнює 0,11-0,18 мм, переважно 0,12-0,18 мм, і, зокрема,...
Виконавчий пристрій автоматики пальника
Номер патенту: 44394
Опубліковано: 15.02.2002
Автор: Мельніков Михайло Анатолійович
МПК: F23D 14/46, F23N 5/00
Мітки: автоматики, виконавчий, пальника, пристрій
Формула / Реферат:
Виконавчий пристрій автоматики пальника, що має клапани основного пальника, клапан запальника та клапан безпеки, оснащені механізмом їхнього відкривання та закривання а також заслінку повітряну з приводом її синхронного переміщення, який відрізняється тим, що привід синхронного переміщення заслінки повітряної зв'язаний з механізмом відкривання кожного з клапанів з можливістю їх взаємопов'язаного переміщення, а з клапанами основного пальника...
Пристрій затримки прямокутних імпульсів керований напругою
Номер патенту: 34652
Опубліковано: 15.03.2001
Автор: Пшеюк Сергій Іванович
МПК: H03K 5/13
Мітки: керований, напругою, прямокутних, імпульсів, пристрій, затримки
Формула / Реферат:
Пристрій затримки прямокутних імпульсів, керований напругою, який містить перший і другий одновібратори, входи яких з'єднані з вхідною шиною, трьохвходовий мажоритарний елемент, вихід якого є виходом пристрою, а перший вхід з'єднано з інверсним виходом першого одновібратора, підключеного своїм входом до другого входу мажоритарного елемента і через другий одновібратор до третього входу мажоритарного елемента, який відрізняється тим, що...
Інтерфейсний виконавчий механізм клапана
Номер патенту: 71896
Опубліковано: 17.01.2005
Автори: Николайчук Ярослав Миколайович, Перцович Іван Васильович
МПК: F16K 31/04
Мітки: виконавчий, механізм, клапана, інтерфейсний
Формула / Реферат:
Інтерфейсний виконавчий механізм клапана трубопроводу, який складений з арматури клапана, крокового двигуна приводу цієї арматури та блока керування клапаном, який відрізняється тим, що блок керування розташовано безпосередньо на приводі арматури, а привід обладнано окремо встановленими на ньому додатковими кроковими двигунами з можливістю їхньої сумісної роботи в процесі керування в синхронному режимі.
Попередній патент: Одноразовий медичний шприц
Наступний патент: Спосіб металорефлексотерапії
Випадковий патент: Формувач одиночного імпульсу з програмованою тривалістю і затримкою початку формування відносно стартового