Керований виконавчий пристрій
Номер патенту: 11632
Опубліковано: 16.01.2006
Автори: Дибська Ирина Юріївна, Казмірук Антон Віталійович, Бандура Іван Миколайович, Лисов Олексій Олександрович
Формула / Реферат
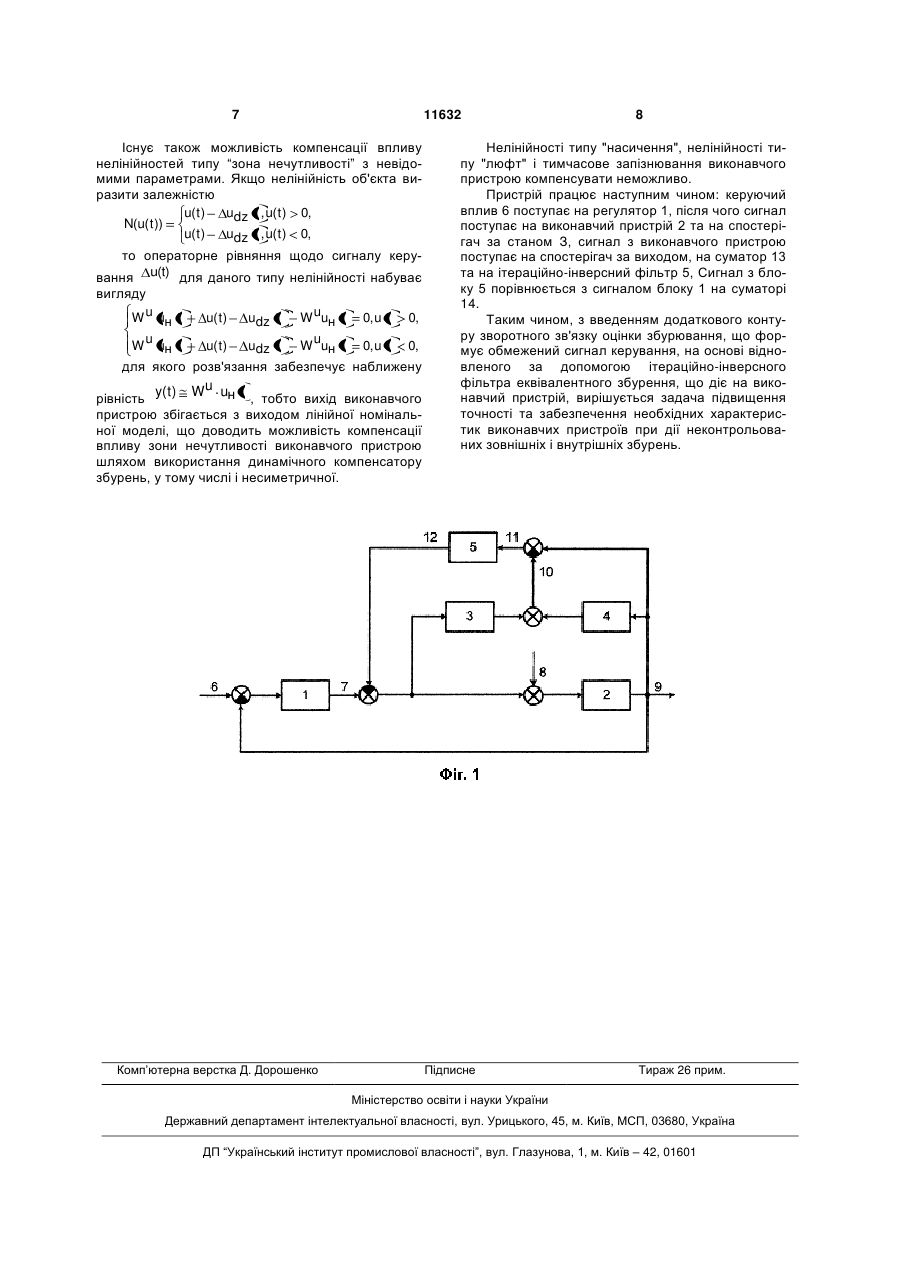
Керований виконавчий пристрій, що містить послідовно з’єднані регулятор і виконавчий пристрій, вихід якого з’єднаний з інверсним входом першого суматора, до прямого входу якого підключений сигнал потрібного виходу виконавчого пристрою, вихід першого суматора з’єднаний з входом регулятора, який відрізняється тим, що в нього введені спостерігач за станом, спостерігач за виходом і ітераційно-інверсний фільтр, вхід спостерігача за станом з’єднаний з виходом другого суматора, вхід спостерігача за виходом з’єднаний з виходом виконавчого пристрою, виходи цих спостерігачів через третій суматор разом з виходом виконавчого пристрою з’єднані з входом ітераційно-інверсного фільтра, вихід якого підключений до інверсного входу другого суматора.
Текст
Керований виконавчий пристрій, що містить послідовно з’єднані регулятор і виконавчий пристрій, вихід якого з’єднаний з інверсним входом 3 11632 Wp (s) регулятор з передавальною функцією , 2 виконавчий пристрій з передавальною функцією W0 (s) , 3 - спостерігач за станом з передавальною ~/u y We (s) функцією ; 4 - спостерігач за виходом з ~/ y y We (s) передавальною функцією ; 5 - ітераційно-інверсний фільтр з передавальною функцією W1( s ) ; 6 - сигнал потрібного виходу виконавчого пристрою G(s) ; 7 - сигнал керування U(s) ; 8 - сиг 4 ~ нал еквівалентного збурення V(s) ; 9 - сигнал реального виходу Y(s) ; 10 - s-перетворення сигналу ~ спостерігачів Y(s) ; 11 - помилка оцінки виходу ~ Y(s) Y(s) Y(s) ; 12 - сигнал еквівалентного збу~ рення V(s) , 13 – 1-й суматор; 14 – 2-й суматор; 15 – 3-й суматор. Використовуючи функціональну блок-схему приведену на фіг. 1, запишемо передавальну функцію виконавчого пристрою замкнутого компенсаційним контуром за збуренням ~/u y W0 (s) 1 We (s) W1(s) Wyv (s) ~/ y ~/u y y 1 W1(s) W0 (s) W1(s) W0 (s) We We W1(s) ,а також передавальну функцію системи керування виконавчим пристроєм з врахуванням внутрішнього компенсаційного контуру за збуренням ~/u y W0 (s) 1 We (s) W1(s) Wyv (s) ~/ y ~/u y y 1 W1(s) W0 (s) W1(s) W0 (s) We We W1(s) Wp (s) W0 (s) Однак основною проблемою при досягненні Враховуючи приведені вираження на основі інваріантності системи є фізична нереалізованість теорії інваріантності випливає умова незалежності оберненої передавальної функції. Тому для виковиходу виконавчого пристрою від еквівалентного навчого пристрою запропоновано використовувати ~/u представлення операції обернення рядом Неймаy 1 We W1(s) 0 на або ітераційною інверсією, що дозволяє досягзбурення у вигляді , а у випадти деякого наближення до оберненої функції ку оберненості передаточної функції спостерігача 1 ~/u y W1 S We (s) стану за керуванням . ~/u y We (s) 1 1 ~/u y 1 K v We (s) ~/u y 1 K v We (s) , 1 ~/u y We (0) Kv де - масштабний множник. Цей вираз є ітераційно-інверсною моделлю у формі передавальних функцій. Для аналізу властивостей системи виконавчого пристрою за отриманими передавальними функціями системи керування виконавчим пристроєм замкнутого компенсаційним контуром за збуренням та внутрішнього компенсаційного контуру за збуренням рівняння спостерігача стану ~/u ~/ y y y ˆ Y(s) We (s) U(s) We (s) Y(s) можна представити в поліноміальній формі ˆ Q(s) L(s) Y(s) P(s) U(s) L(s) Y(s) . Тоді, з урахуванням того, що ~/u P(s) y We (s) Q(s) L(s) , ~/ y y We (s) L(s) Q(s) L(s) , 2 W0 (s) ... ~/u y 1 K v We (s) N Kv Kv P(s) Q(s) , Pp (s) Qp (s) , , де P(s) - поліном чисельника передавальної функції номінальної моделі степеня n, Q(s) – поліном знаменника передавальної функції номінальної моделі степеня n, n m; L(s) - поліном спостерігача степеня n; Pp(s), Qp(s) - поліном регулятора відповідних порядків; отримано, що передавальна функція за еквівалентним збуренням виконавчого пристрою, замкнутого внутрішнім компенсаційним контуром визначається як N P(s) Q(s L(s) K v P(s)) Wyv (s) Q(s) Q(s) L(s) ; а передавальна функція за еквівалентним збуренням виконавчого пристрою, замкнутого компенсаційним і зовнішнім контуром, відповідно Wp (s) 5 11632 6 N Q(s) P(s) Q(s L(s) K v P(s)) P(s) Pp (s) Q(s) Qp (s) Q(s) L(s) ,де N - кількість членів розкладання в ряд Нека формул передавальних функцій системи керуймана. вання виконавчим пристроєм замкнутого компенПри підстановці значення саційним контуром за збуренням та внутрішнього компенсаційного контуру за збуренням визначено, Q(0) L(0) q0 l0 Kv що P(0) p0 у співмножник чисельниWyv (s) n 1 Q(s) L(s) K v P(s) s p0 qi li si q0 l0 i 1 .З отриманого виразу встановлено, що при представленні W1(s) з однією ітерацією передавальна функція за еквівалентним збуренням обох контурів мають астатизм 1-го порядку. Порядок астатизму передавальних функцій виконавчого пристрою за збуренням дорівнює кількості ітерацій, що визначають наближення до оберненої передавальної функції. У корисній моделі вирішена задача компенсації впливу нелінійностей та не-стаціонарностей шляхом використання динамічного компенсатору збурень з формуванням додаткового сигналу керування u( t ) , що дозволяє компенсувати нелінійності й нестаціонарності та здійснювати керування лінійною номінальною моделлю. Представимо вихід виконавчого пристрою у вигляді y( t ) Wu N u t , y/u ˆ 1 W1 We u( t ) u де W - оператор лінійної динамічної частини виконавчого пристрою; N() -оператор нелінійної статичної частини. Номінальну модель виконавчого пристрою приймаємо лінійною, яку представимо в операторy ( t ) Wu Kн uн( t ) ному вигляді н , сигнал керуu(t) uн (t) u(t) u (t) вання визначається як , де н сигнал керування за номінальною моделлю (основний контур керування); u( t ) - сигнал компенсаційного керування. Відповідно до функціональної блок-схеми, показаної на фіг. 1, отримано операторне рішення щодо сигналу керування u( t ) : y/y ˆ W1 1 W1 We , де Wі - оператор, що відповідає однойменній iй передавальній функції. При виконанні умов інверсії оператора або оберненості системи за входом 1 ~/u y W1 S We (s) приведене рівняння щодо сигналу керування спрощується до взаємозв'язку статичних характеристик N u( t ) u( t ) K н uн ( t ) , що дозволяє провести аналіз впливу нелінійностей за допомогою динамічного компенсатору збурень. Вище використано ітераційну інверсію, що у просторі стану має нескладну обчислювальну реалізацію і дозволяє одержати розв'язання операторного рішення щодо сигналу керування з необхідною точністю. За умови, що інверсія ~/u y We (s) передавальної функції здійснено, вирішено задачу аналізу можливості розв'язання рівняння взаємозв'язку статичних характеристик як можливість існування обмеженої функції u(t) . Існує можливість компенсації впливу гладких нелінійностей, що підпорядковуються умовам Ліпшица m 1 pi si i 1 W u N u( t ) N u1 t u( t ) N u2 t W uKн uн( t ) N u1( t ) u2( t ) , де N - константа Ліпшица. Для цього нелінійний статичний оператор представимо в лінеаризованій формі N N uн( t ) N uн( t ) u( t ) uu u н , і тоді розв'язок рівняння взаємозв'язку статичN 0 uu u н них характеристик існує, якщо для всіх поточних значень номінального керування: 1 N u( t ) Kн uн ( t ) N uн ( t ) uu u н . Підстановка отриманого вираження у рівняння взаємозв'язку статичних характеристик приводить y( t ) W u Kн uн до наближеної рівності . Таким чином, отримано збіг виходів виконавчого пристрою і номінальної моделі із точністю до лінійних членів розкладання, що доводить можливість компенсації динамічним компенсатором збурень впливу Ліпшицевих нелінійностей. 7 11632 Існує також можливість компенсації впливу нелінійностей типу “зона нечутливості” з невідомими параметрами. Якщо нелінійність об'єкта виразити залежністю u( t ) udz t , u( t ) 0, N(u( t )) u( t ) udz t , u( t ) 0, то операторне рівняння щодо сигналу керування u(t) для даного типу нелінійності набуває вигляду W u uн t u( t ) udz t W uuн t 0, u t 0, W u uн t u( t ) udz t W uuн t 0, u t 0, для якого розв'язання забезпечує наближену y( t ) W u uн t рівність , тобто вихід виконавчого пристрою збігається з виходом лінійної номінальної моделі, що доводить можливість компенсації впливу зони нечутливості виконавчого пристрою шляхом використання динамічного компенсатору збурень, у тому числі і несиметричної. Комп’ютерна верстка Д. Дорошенко 8 Нелінійності типу "насичення", нелінійності типу "люфт" і тимчасове запізнювання виконавчого пристрою компенсувати неможливо. Пристрій працює наступним чином: керуючий вплив 6 поступає на регулятор 1, після чого сигнал поступає на виконавчий пристрій 2 та на спостерігач за станом З, сигнал з виконавчого пристрою поступає на спостерігач за виходом, на суматор 13 та на ітераційно-інверсний фільтр 5, Сигнал з блоку 5 порівнюється з сигналом блоку 1 на суматорі 14. Таким чином, з введенням додаткового контуру зворотного зв'язку оцінки збурювання, що формує обмежений сигнал керування, на основі відновленого за допомогою ітераційно-інверсного фільтра еквівалентного збурення, що діє на виконавчий пристрій, вирішується задача підвищення точності та забезпечення необхідних характеристик виконавчих пристроїв при дії неконтрольованих зовнішніх і внутрішніх збурень. Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControlled actuating device
Автори англійськоюDybska Iryna Yuriivna, Bandura Ivan Mykolaiovych
Назва патенту російськоюУправляемое исполнительное устройство
Автори російськоюДибская Ирина Юрьевна, Бандура Иван Николаевич
МПК / Мітки
МПК: G05B 15/02
Мітки: пристрій, виконавчий, керований
Код посилання
<a href="https://ua.patents.su/4-11632-kerovanijj-vikonavchijj-pristrijj.html" target="_blank" rel="follow" title="База патентів України">Керований виконавчий пристрій</a>
Виконавчий механізм для інгалятора та інгалятор, що містить виконавчий механізм
Номер патенту: 66820
Опубліковано: 15.06.2004
Автори: Расмуссен Ерген, Ходсон Деррен
МПК: A61M 11/00, A61M 15/00
Мітки: містить, інгалятор, виконавчий, інгалятора, механізм
Формула / Реферат:
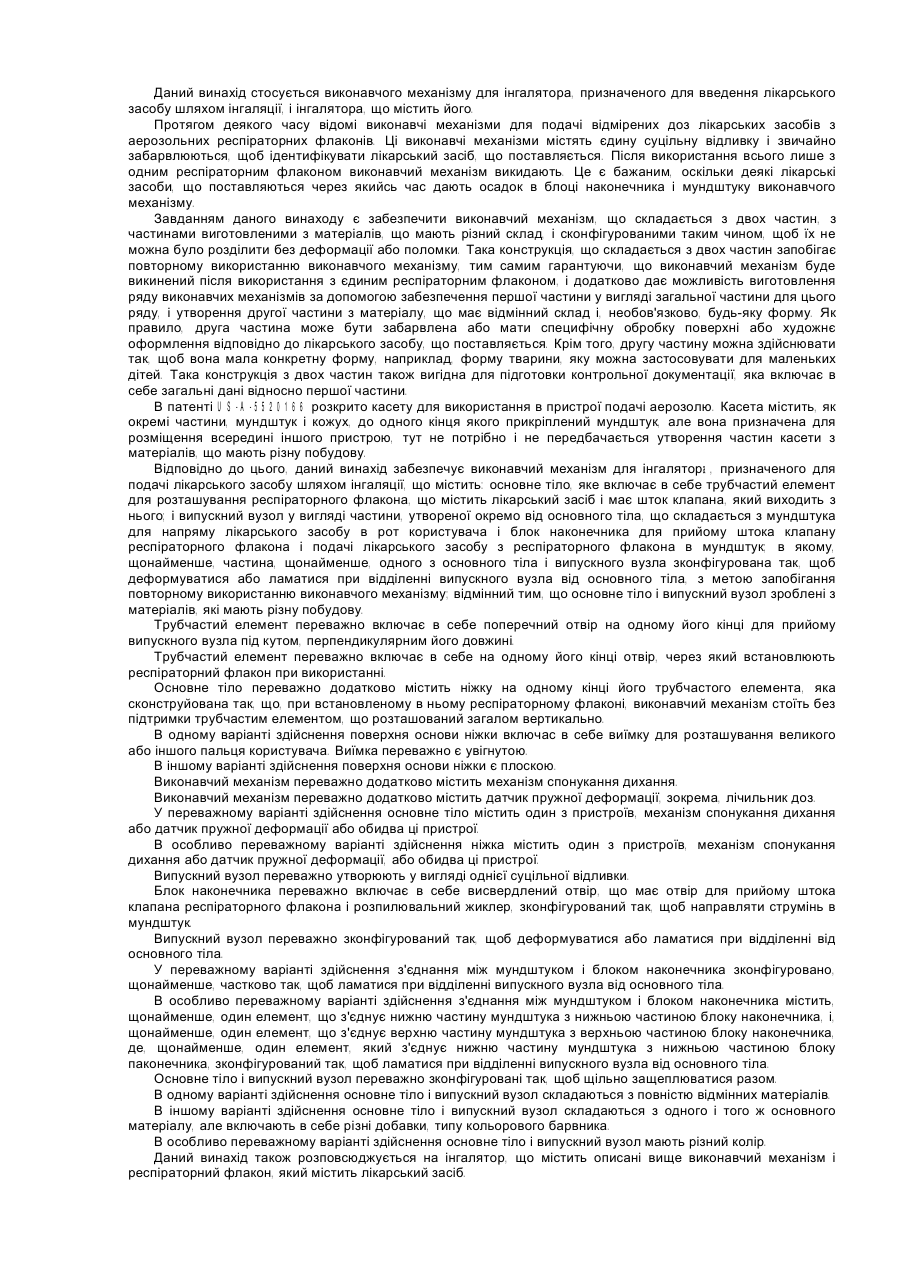
1. Виконавчий механізм для інгалятора, призначеного для введення лікарського засобу шляхом інгаляції, що містить основне тіло (2), що включає в себе трубчастий елемент (8) для прийому респіраторного флакона (7), що містить лікарський засіб, і шток (11) клапана, що виходить з нього, випускний вузол (4) у вигляді частини, утвореної окремо від основного тіла (2), що містить мундштук для направлення лікарського засобу в рот користувача і блок...
Виконавчий механізм рульового керування транспортного засобу

Номер патенту: 63416
Опубліковано: 15.01.2004
Автори: Лубяний Микола Миколайович, Петров Віктор Олексійович, Жуковський Віктор Анатолійович, Крилов Володимир Вікторович, Антонова Галина Володимирівна, Просвірнін Віктор Іванович, Бондар Андрій Миколайович
МПК: B62D 5/10
Мітки: керування, виконавчий, механізм, засобу, транспортного, рульового
Формула / Реферат:
1. Виконавчий механізм рульового керування транспортного засобу, який має гідроциліндр двосторонньої дії, поршень з ущільнювальними кільцями та штоком, кришки, патрубки для підводу робочої рідини, який відрізняється тим, що поршень має кільцеподібні магніти, які установлені на бічних його поверхнях.2. Виконавчий механізм за п. 1, який відрізняється тим, що магніти закріплені на бічних поверхнях через немагнітні шайби.3....
Виконавчий пристрій автоматики пальника
Номер патенту: 44394
Опубліковано: 15.02.2002
Автор: Мельніков Михайло Анатолійович
МПК: F23N 5/00, F23D 14/46
Мітки: пристрій, автоматики, пальника, виконавчий
Формула / Реферат:
Виконавчий пристрій автоматики пальника, що має клапани основного пальника, клапан запальника та клапан безпеки, оснащені механізмом їхнього відкривання та закривання а також заслінку повітряну з приводом її синхронного переміщення, який відрізняється тим, що привід синхронного переміщення заслінки повітряної зв'язаний з механізмом відкривання кожного з клапанів з можливістю їх взаємопов'язаного переміщення, а з клапанами основного пальника...
Інтерфейсний виконавчий механізм клапана
Номер патенту: 71896
Опубліковано: 17.01.2005
Автори: Перцович Іван Васильович, Николайчук Ярослав Миколайович
МПК: F16K 31/04
Мітки: клапана, механізм, виконавчий, інтерфейсний
Формула / Реферат:
Інтерфейсний виконавчий механізм клапана трубопроводу, який складений з арматури клапана, крокового двигуна приводу цієї арматури та блока керування клапаном, який відрізняється тим, що блок керування розташовано безпосередньо на приводі арматури, а привід обладнано окремо встановленими на ньому додатковими кроковими двигунами з можливістю їхньої сумісної роботи в процесі керування в синхронному режимі.
Виконавчий орган очисного комбайна

Номер патенту: 66571
Опубліковано: 17.05.2004
Автори: Кузнецов Едуард Анатольович, Родіонов Іван Федорович, Яворський Андрій Васильович
МПК: E21C 25/04
Мітки: комбайна, орган, очисного, виконавчий
Формула / Реферат:
Виконавчий орган очисного комбайна, що має корпус у вигляді порожнистого барабана, до якого приєднаний відрізний диск з різцями на його поверхні, який відрізняєтьсятим, що на зовнішній поверхні барабана розташовані по спіралі різці, які закріплені в різцетримачах на кронштейнах, що приєднані до корпусу, з можливістю руйнування вугілля з оголеного боку забою першим різцем.
Попередній патент: Апарат для оперативного лікування контрактур ліктьового суглоба
Наступний патент: Композиція інгредієнтів для алкогольних медових напоїв під торговельною маркою “медовуха”
Випадковий патент: Направляючий апарат осьового компресора