Приймальний тракт гідроакустичного доплерівського лага з автоматичним регулюванням підсилення
Номер патенту: 19457
Опубліковано: 15.12.2006
Автори: Онищук Олег Володимирович, Барась Святослав Тадіонович
Формула / Реферат
Приймальний тракт гідроакустичного доплерівського лага з автоматичним регулюванням підсилення, кожен канал якого складається з послідовно з’єднаних приймальної антени, змішувача, вузькосмугового фільтра, який відрізняється тим, що в нього введено каскад попереднього підсилення з схемою автоматичного регулювання підсилення та каскад основного підсилення, причому перший вхід каскаду попереднього підсилення з’єднано з приймальною антеною, перший вихід якого з’єднано з змішувачем, другий вихід - з входом схеми автоматичного регулювання підсилення, вихід якої з’єднано з другим входом каскаду попереднього підсилення, вхід каскаду основного підсилення з’єднано з виходом вузькосмугового фільтра.
Текст
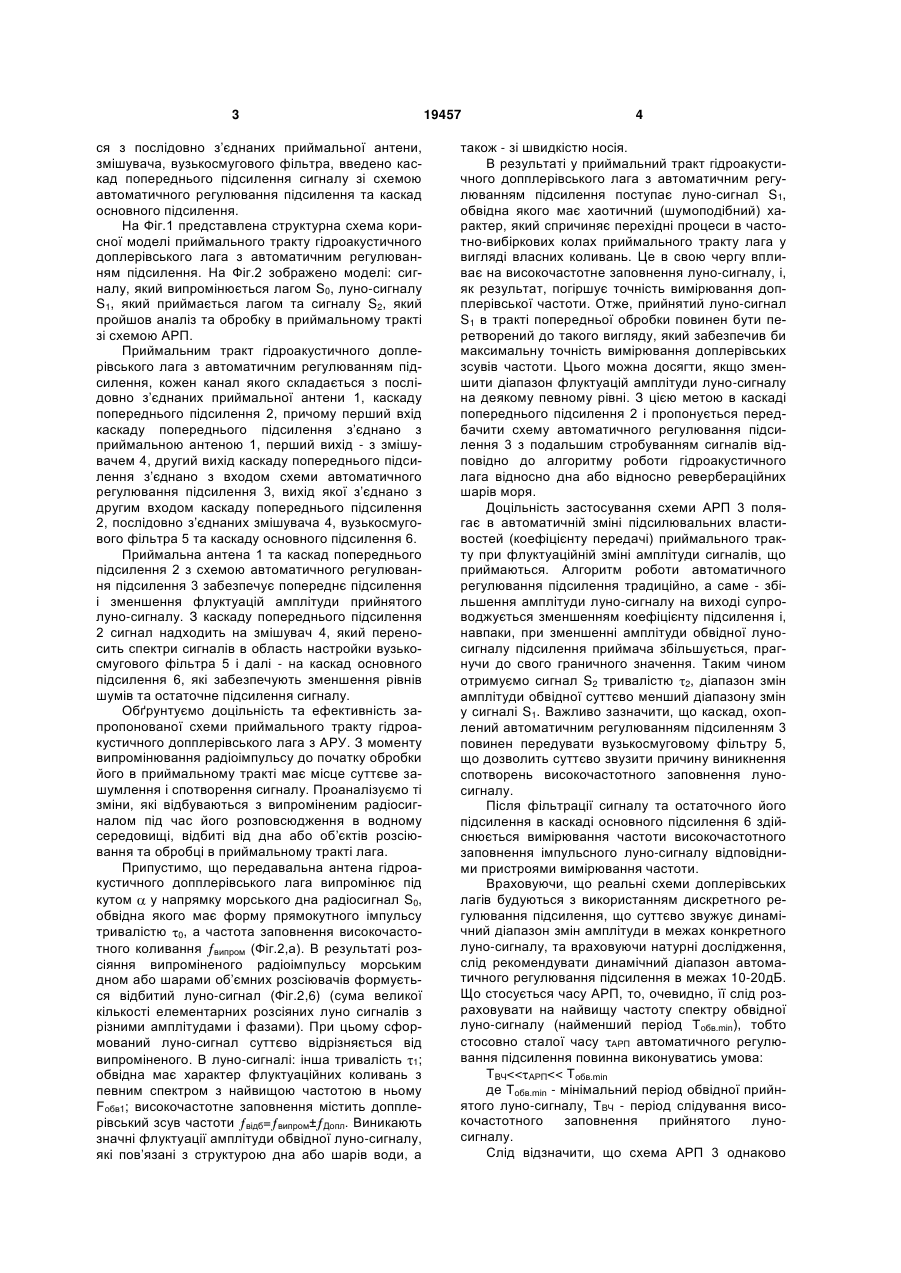
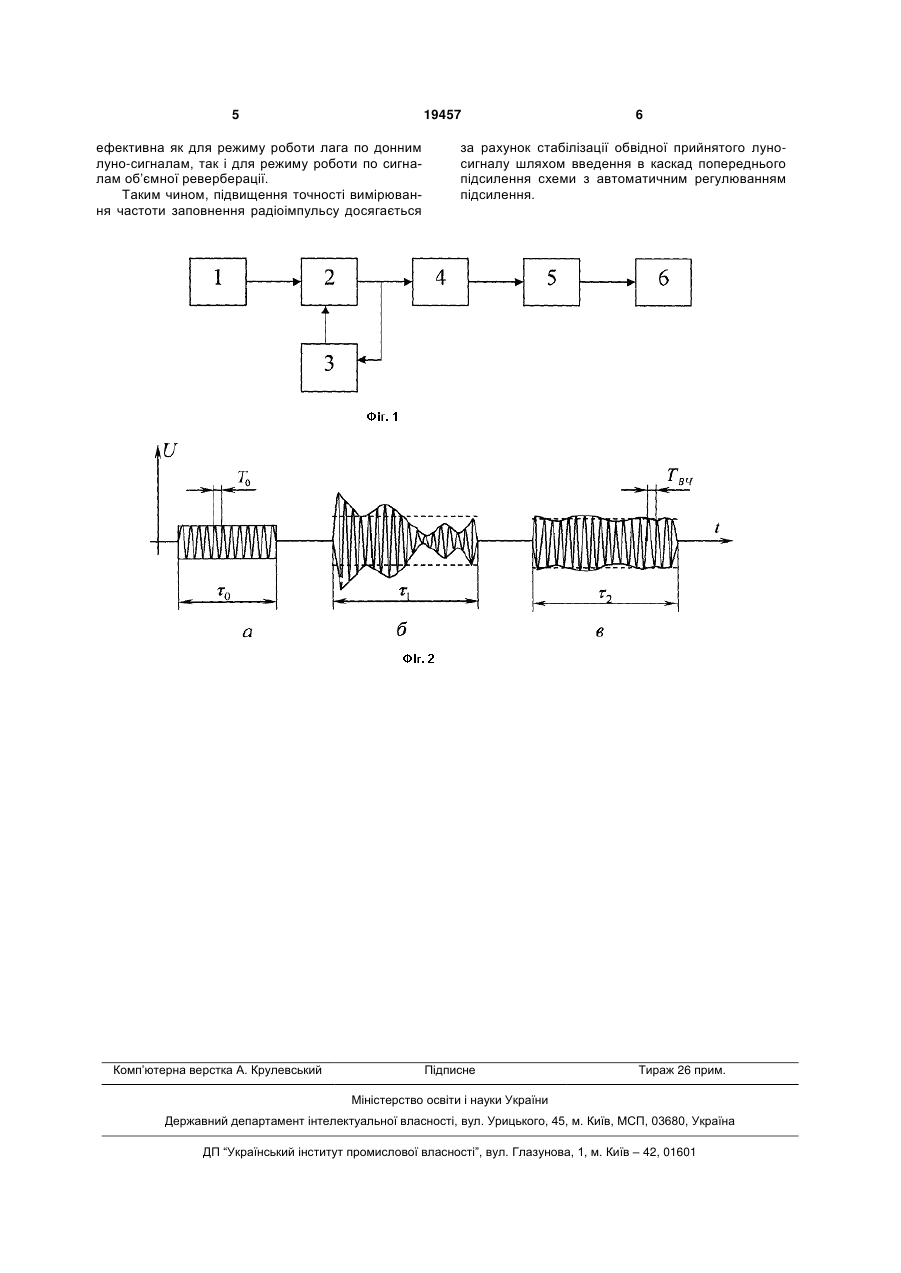
Приймальний тракт гідроакустичного доплерівського лага з автоматичним регулюванням підсилення, кожен канал якого складається з послідовно з’єднаних приймальної антени, змішувача, 3 ся з послідовно з’єднаних приймальної антени, змішувача, вузькосмугового фільтра, введено каскад попереднього підсилення сигналу зі схемою автоматичного регулювання підсилення та каскад основного підсилення. На Фіг.1 представлена структурна схема корисної моделі приймального тракту гідроакустичного доплерівського лага з автоматичним регулюванням підсилення. На Фіг.2 зображено моделі: сигналу, який випромінюється лагом S0, луно-сигналу S1, який приймається лагом та сигналу S2, який пройшов аналіз та обробку в приймальному тракті зі схемою АРП. Приймальним тракт гідроакустичного доплерівського лага з автоматичним регулюванням підсилення, кожен канал якого складається з послідовно з’єднаних приймальної антени 1, каскаду попереднього підсилення 2, причому перший вхід каскаду попереднього підсилення з’єднано з приймальною антеною 1, перший вихід - з змішувачем 4, другий вихід каскаду попереднього підсилення з’єднано з входом схеми автоматичного регулювання підсилення 3, вихід якої з’єднано з другим входом каскаду попереднього підсилення 2, послідовно з’єднаних змішувача 4, вузькосмугового фільтра 5 та каскаду основного підсилення 6. Приймальна антена 1 та каскад попереднього підсилення 2 з схемою автоматичного регулювання підсилення 3 забезпечує попереднє підсилення і зменшення флуктуацій амплітуди прийнятого луно-сигналу. З каскаду попереднього підсилення 2 сигнал надходить на змішувач 4, який переносить спектри сигналів в область настройки вузькосмугового фільтра 5 і далі - на каскад основного підсилення 6, які забезпечують зменшення рівнів шумів та остаточне підсилення сигналу. Обґрунтуємо доцільність та ефективність запропонованої схеми приймального тракту гідроакустичного допплерівського лага з АРУ. З моменту випромінювання радіоімпульсу до початку обробки його в приймальному тракті має місце суттєве зашумлення і спотворення сигналу. Проаналізуємо ті зміни, які відбуваються з випроміненим радіосигналом під час його розповсюдження в водному середовищі, відбиті від дна або об’єктів розсіювання та обробці в приймальному тракті лага. Припустимо, що передавальна антена гідроакустичного допплерівського лага випромінює під кутом у напрямку морського дна радіосигнал S0, обвідна якого має форму прямокутного імпульсу тривалістю 0, а частота заповнення високочастотного коливання випром (Фіг.2,а). В результаті розсіяння випроміненого радіоімпульсу морським дном або шарами об’ємних розсіювачів формується відбитий луно-сигнал (Фіг.2,6) (сума великої кількості елементарних розсіяних луно сигналів з різними амплітудами і фазами). При цьому сформований луно-сигнал суттєво відрізняється від випроміненого. В луно-сигналі: інша тривалість 1; обвідна має характер флуктуаційних коливань з певним спектром з найвищою частотою в ньому Fобв1; високочастотне заповнення містить допплерівський зсув частоти відб= випром± Допл. Виникають значні флуктуації амплітуди обвідної луно-сигналу, які пов’язані з структурою дна або шарів води, а 19457 4 також - зі швидкістю носія. В результаті у приймальний тракт гідроакустичного допплерівського лага з автоматичним регулюванням підсилення поступає луно-сигнал S1, обвідна якого має хаотичний (шумоподібний) характер, який спричиняє перехідні процеси в частотно-вибіркових колах приймального тракту лага у вигляді власних коливань. Це в свою чергу впливає на високочастотне заповнення луно-сигналу, і, як результат, погіршує точність вимірювання допплерівської частоти. Отже, прийнятий луно-сигнал S1 в тракті попередньої обробки повинен бути перетворений до такого вигляду, який забезпечив би максимальну точність вимірювання доплерівських зсувів частоти. Цього можна досягти, якщо зменшити діапазон флуктуацій амплітуди луно-сигналу на деякому певному рівні. З цією метою в каскаді попереднього підсилення 2 і пропонується передбачити схему автоматичного регулювання підсилення 3 з подальшим стробуванням сигналів відповідно до алгоритму роботи гідроакустичного лага відносно дна або відносно ревербераційних шарів моря. Доцільність застосування схеми АРП 3 полягає в автоматичній зміні підсилювальних властивостей (коефіцієнту передачі) приймального тракту при флуктуаційній зміні амплітуди сигналів, що приймаються. Алгоритм роботи автоматичного регулювання підсилення традиційно, а саме - збільшення амплітуди луно-сигналу на виході супроводжується зменшенням коефіцієнту підсилення і, навпаки, при зменшенні амплітуди обвідної луносигналу підсилення приймача збільшується, прагнучи до свого граничного значення. Таким чином отримуємо сигнал S2 тривалістю 2, діапазон змін амплітуди обвідної суттєво менший діапазону змін у сигналі S1. Важливо зазначити, що каскад, охоплений автоматичним регулюванням підсиленням 3 повинен передувати вузькосмуговому фільтру 5, що дозволить суттєво звузити причину виникнення спотворень високочастотного заповнення луносигналу. Після фільтрації сигналу та остаточного його підсилення в каскаді основного підсилення 6 здійснюється вимірювання частоти високочастотного заповнення імпульсного луно-сигналу відповідними пристроями вимірювання частоти. Враховуючи, що реальні схеми доплерівських лагів будуються з використанням дискретного регулювання підсилення, що суттєво звужує динамічний діапазон змін амплітуди в межах конкретного луно-сигналу, та враховуючи натурні дослідження, слід рекомендувати динамічний діапазон автоматичного регулювання підсилення в межах 10-20дБ. Що стосується часу АРП, то, очевидно, її слід розраховувати на найвищу частоту спектру обвідної луно-сигналу (найменший період Тобв.min), тобто стосовно сталої часу АРП автоматичного регулювання підсилення повинна виконуватись умова: ТВЧ
ДивитисяДодаткова інформація
Назва патенту англійськоюReceiver of a hydroacoustical doppler log with automatic gain control
Автори англійськоюBaras Sviatoslav Tadionovych, Onyschuk Oleh Volodymyrovych
Назва патенту російськоюПриемник гидроакустического доплеровского лага с автоматической регулировкой усиления
Автори російськоюБарась Святослав Тадионович, Онищук Олег Владимирович
МПК / Мітки
МПК: G01S 15/00
Мітки: гідроакустичного, лага, тракт, доплерівського, приймальний, автоматичним, регулюванням, підсилення
Код посилання
<a href="https://ua.patents.su/3-19457-prijjmalnijj-trakt-gidroakustichnogo-doplerivskogo-laga-z-avtomatichnim-regulyuvannyam-pidsilennya.html" target="_blank" rel="follow" title="База патентів України">Приймальний тракт гідроакустичного доплерівського лага з автоматичним регулюванням підсилення</a>
Перетворювач змін частоти сигналу у фазовий зсув
Номер патенту: 36610
Опубліковано: 16.04.2001
Автор: Рапін Володимир Васильович
МПК: H03L 7/00
Мітки: фазовий, зсув, частоти, перетворювач, змін, сигналу
Текст:
...до входу др угого підсилювача з автоматичним регулюванням підсилення 7, вихід цього підсилювача з'єднаний з другими входами блоків формування сигналу синхронізації 2, 3, 4 (n+1 блок). Структурна схема блоку формування сигналу синхронізації містить послідовно з'єднані суматор 8 і підсилювач з автоматичним регулюванням підсилення 9, причому перший та другий входи суматора 8 є також першим та другим входами блоку формування сигналу...
Обприскувач з автоматичним регулюванням витрати рідини
Номер патенту: 11325
Опубліковано: 25.12.1996
Автори: Шумковський Валерій Миколайович, Секета Ігор Тадейович, Тертула Роман Петрович, Білянський Василь Володимирович
МПК: A01M 7/00
Мітки: регулюванням, витрати, рідини, обприскувач, автоматичним
Формула / Реферат:
Опрыскиватель с автоматическим регулированием расхода жидкости, содержащий резервуар для жидкости, насос, нагнетательную магистраль с датчиком расхода жидкости, на выходе которой установлено распыливающее устройство, исполнительный механизм, подключенный через усилитель мощности к блоку сравнения, связанному с датчиком расхода жидкости и датчиком перемещения агрегата, и задатчик нормы расхода, отличающийся тем, что, с целью упрощения...
Розтискний пристрій з автоматичним регулюванням зазору гальмового механізму
Номер патенту: 28183
Опубліковано: 16.10.2000
Автори: Большаков Анатолій Костянтинович, Шепеленко Ігор Георгієвич, Дуель Яков Ісаакович, Магерамов Лютфалі-Курбан Алієвич
МПК: F16D 65/16
Мітки: зазору, пристрій, механізму, розтискний, регулюванням, гальмового, автоматичним
Формула / Реферат:
Разжимное устройство с автоматическим регулированием зазора тормозного механизма, включающее корпус, в котором расположены два толкателя, между которыми установлен клин с опорными роликами, выполненными с возможностью перемещения между толкателями и воздействия на прижим колодки, отличающееся тем, что каждый толкатель выполнен из двух частей и вместе с корпусом и прижимом колодки образуют гидравлическую полость, соединенную через устройство...
Спосіб підсилення рівня електричного сигналу
Номер патенту: 43400
Опубліковано: 17.12.2001
Автор: Костирко Леонід Миколайович
Мітки: сигналу, спосіб, підсилення, рівня, електричного
Формула / Реферат:
1. Спосіб підсилення рівня електричного сигналу з можливістю регулювання рівня в межах від найменшого до найбільшого значення, який складається з регулювання рівня електричного сигналу, наступного двотактного підсилення рівня електричного сигналу та передачі підсиленого електричного сигналу до навантаження, який відрізняється тим, що після регулювання рівня електричного сигналу до зони найменшого рівня сигнал підсилюють додатковою операцією...
Тракт проміжної частоти чм-передавача
Номер патенту: 49046
Опубліковано: 16.09.2002
Автори: Довгий Станіслав Олексійович, Войтенко Олександр Григорович, Малєв Валерій Іванович, Женжера Віктор Леонідович, Зубарєв Валерій Володимирович, Литвин Володимир Михайлович, Наритник Теодор Миколайович, Падалко Віктор Григорович, Немчин Олександр Федорович, Савченко Олексій Якович
МПК: H03G 11/00
Мітки: проміжної, тракт, чм-передавача, частоти
Формула / Реферат:
1. Тракт проміжної частоти ЧМ-передавача, що містить з’єднані послідовно модулятор, коаксіальну лінію зв'язку, перший смуговий фільтр та другий смуговий фільтр, вихід якого є виходом тракту, який відрізняється тим, що між виходом першого смугового фільтра та входом другого смугового фільтра встановлений підсилювач-обмежувач зі сталою амплітудою та з порогом обмеження, відповідним довжині коаксіальної лінії зв'язку, а керуючий вхід модулятора...
Попередній патент: Спосіб профілактики і комплексного лікування гострого гнійного обструктивного пієлонефриту
Наступний патент: Спосіб виготовлення борошняного напівфабрикату
Випадковий патент: Електродуговий плазмотрон