Вантажозахоплювальний агрегат
Номер патенту: 21457
Опубліковано: 15.03.2007
Автори: Клименко Віктор Микитович, Бондарчук Павло Степанович
Формула / Реферат
Вантажозахоплювальний агрегат, який містить декілька магнітоелектричних вантажозахоплювальних пристроїв, кожен з яких має рухому і нерухому частини, робочі поверхні для утримування вантажу, при цьому нерухома частина має просторово відділені одна від одної складові частини, на внутрішніх поверхнях яких знаходяться пази, у які вкладена обмотка керування, рухома частина складається з постійного магніту і пари полюсів і має можливість повороту на кут, що дорівнює половині кута полюсного ділення, а вісь, яка проходить крізь центри пазів і центр рухомої частини, має однакові кутові нахили до двох крайніх положень останньої, при цьому пази з обмоткою керування постійно знаходяться під дією магнітних полюсів відповідної полярності, який відрізняється тим, що кожний з вантажозахоплювальних пристроїв має на робочій поверхні давач магнітного потоку, а агрегат в цілому - схему керування, яка містить блок комутації для послідовного вмикання (вимикання) електроживлення пристроїв, пульт оператора, до складу якого входять схема послідовного вмикання (вимикання) пристроїв, схема індикації, органи керування та елементи індикації та сигналізації.
Текст
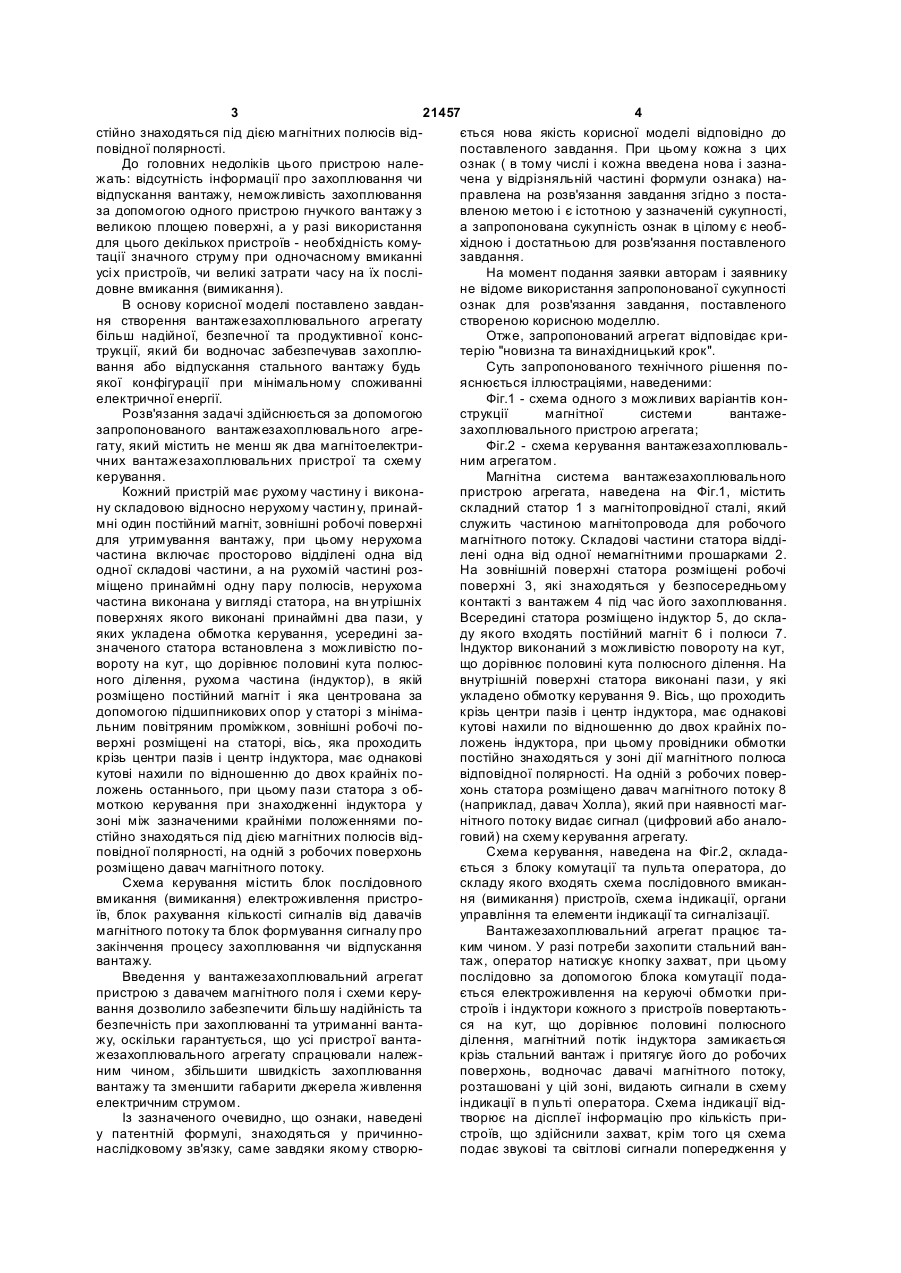
Вантажозахоплювальний агрегат, який містить декілька магнітоелектричних вантажозахоплювальних пристроїв, кожен з яких має рухому і нерухому частини, робочі поверхні для утримування вантажу, при цьому нерухома частина має просторово відділені одна від одної складові частини, на внутрішніх поверхнях яких знаходяться пази, у які вкладена обмотка керування, рухома частина складається з постійного магніту і пари полюсів і 3 21457 4 стійно знаходяться під дією магнітних полюсів відється нова якість корисної моделі відповідно до повідної полярності. поставленого завдання. При цьому кожна з цих До головних недоліків цього пристрою налеознак ( в тому числі і кожна введена нова і зазнажать: відсутність інформації про захоплювання чи чена у відрізняльній частині формули ознака) навідпускання вантажу, неможливість захоплювання правлена на розв'язання завдання згідно з постаза допомогою одного пристрою гнучкого вантажу з вленою метою і є істотною у зазначеній сукупності, великою площею поверхні, а у разі використання а запропонована сукупність ознак в цілому є необдля цього декількох пристроїв - необхідність комухідною і достатньою для розв'язання поставленого тації значного струму при одночасному вмиканні завдання. усі х пристроїв, чи великі затрати часу на їх посліНа момент подання заявки авторам і заявнику довне вмикання (вимикання). не відоме використання запропонованої сукупності В основу корисної моделі поставлено завданознак для розв'язання завдання, поставленого ня створення вантажезахоплювального агрегату створеною корисною моделлю. більш надійної, безпечної та продуктивної консОтже, запропонований агрегат відповідає критрукції, який би водночас забезпечував захоплютерію "новизна та винахідницький крок". вання або відпускання стального вантажу будь Суть запропонованого технічного рішення поякої конфігурації при мінімальному споживанні яснюється іллюстраціями, наведеними: електричної енергії. Фіг.1 - схема одного з можливих варіантів конРозв'язання задачі здійснюється за допомогою струкції магнітної системи вантажезапропонованого вантажезахоплювального агрезахоплювального пристрою агрегата; гату, який містить не менш як два магнітоелектриФіг.2 - схема керування вантажезахоплювальчних вантажезахоплювальних пристрої та схему ним агрегатом. керування. Магнітна система вантажезахоплювального Кожний пристрій має рухому частину і виконапристрою агрегата, наведена на Фіг.1, містить ну складовою відносно нерухому частин у, принайскладний статор 1 з магнітопровідної сталі, який мні один постійний магніт, зовнішні робочі поверхні служить частиною магнітопровода для робочого для утримування вантажу, при цьому нерухома магнітного потоку. Складові частини статора віддічастина включає просторово відділені одна від лені одна від одної немагнітними прошарками 2. одної складові частини, а на рухомій частині розНа зовнішній поверхні статора розміщені робочі міщено принаймні одну пару полюсів, нерухома поверхні 3, які знаходяться у безпосередньому частина виконана у вигляді статора, на вн утрішніх контакті з вантажем 4 під час його захоплювання. поверхнях якого виконані принаймні два пази, у Всередині статора розміщено індуктор 5, до склаяких укладена обмотка керування, усередині заду якого входять постійний магніт 6 і полюси 7. значеного статора встановлена з можливістю поІндуктор виконаний з можливістю повороту на кут, вороту на кут, що дорівнює половині кута полюсщо дорівнює половині кута полюсного ділення. На ного ділення, рухома частина (індуктор), в якій внутрішній поверхні статора виконані пази, у які розміщено постійний магніт і яка центрована за укладено обмотку керування 9. Вісь, що проходить допомогою підшипникових опор у статорі з мінімакрізь центри пазів і центр індуктора, має однакові льним повітряним проміжком, зовнішні робочі покутові нахили по відношенню до двох крайніх поверхні розміщені на статорі, вісь, яка проходить ложень індуктора, при цьому провідники обмотки крізь центри пазів і центр індуктора, має однакові постійно знаходяться у зоні дії магнітного полюса кутові нахили по відношенню до двох крайніх повідповідної полярності. На одній з робочих поверложень останнього, при цьому пази статора з обхонь статора розміщено давач магнітного потоку 8 моткою керування при знаходженні індуктора у (наприклад, давач Холла), який при наявності магзоні між зазначеними крайніми положеннями понітного потоку видає сигнал (цифровий або аналостійно знаходяться під дією магнітних полюсів відговий) на схему керування агрегату. повідної полярності, на одній з робочих поверхонь Схема керування, наведена на Фіг.2, складарозміщено давач магнітного потоку. ється з блоку комутації та пульта оператора, до Схема керування містить блок послідовного складу якого входять схема послідовного вмиканвмикання (вимикання) електроживлення пристроня (вимикання) пристроїв, схема індикації, органи їв, блок рахування кількості сигналів від давачів управління та елементи індикації та сигналізації. магнітного потоку та блок формування сигналу про Вантажезахоплювальний агрегат працює тазакінчення процесу захоплювання чи відпускання ким чином. У разі потреби захопити стальний ванвантажу. таж, оператор натискує кнопку захват, при цьому Введення у вантажезахоплювальний агрегат послідовно за допомогою блока комутації подапристрою з давачем магнітного поля і схеми керується електроживлення на керуючі обмотки привання дозволило забезпечити більшу надійність та строїв і індуктори кожного з пристроїв повертаютьбезпечність при захоплюванні та утриманні вантася на кут, що дорівнює половині полюсного жу, оскільки гарантується, що усі пристрої вантаділення, магнітний потік індуктора замикається жезахоплювального агрегату спрацювали належкрізь стальний вантаж і притягує його до робочих ним чином, збільшити швидкість захоплювання поверхонь, водночас давачі магнітного потоку, вантажу та зменшити габарити джерела живлення розташовані у цій зоні, видають сигнали в схему електричним струмом. індикації в п ульті оператора. Схема індикації відІз зазначеного очевидно, що ознаки, наведені творює на дісплеї інформацію про кількість приу патентній формулі, знаходяться у причинностроїв, що здійснили захват, крім того ця схема наслідковому зв'язку, саме завдяки якому створюподає звукові та світлові сигнали попередження у 5 21457 6 разі, якщо не спрацювали деякі пристрої. Для віда робить цей процес більш надійним та безпечпускання вантажу оператор натискує кнопку відпуним. скання, при цьому на обмотки керування подаєтьОтже, корисна модель забезпечує виконання ся напруга обратно!' полярності і індуктори поставленого завдання: створення вантажезахоппристроїв повертаються у первісне положення, лювального агрегату більш надійної, безпечної та магнітний потік замикається крізь статор, сила продуктивної конструкції при мінімальному спожипритягування спадає до нуля. Давачі магнітного ванні електричної енергії. потоку формують нульові сигнали в схему індикаПромислова придатність і ефективність ванції, яка видає на дісплей інформацію про кількість тажезахоплювального агрегату підтверджена вивимкнених пристроїв. готовленими макетами. Таким чином, корисна модель забезпечує не тільки енергозберігання під час переносу вантажу, Комп’ютерна в ерстка В. Мацело Підписне Тираж 26 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюLoad-gripping device
Автори англійськоюKlymenko Viktor Mykytovych, Bondarchuk Pavlo Stepanovych
Назва патенту російськоюГрузозахватный агрегат
Автори російськоюКлименко Виктор Никитович, Бондарчук Павел Степанович
МПК / Мітки
МПК: B66C 1/00
Мітки: агрегат, вантажозахоплювальний
Код посилання
<a href="https://ua.patents.su/3-21457-vantazhozakhoplyuvalnijj-agregat.html" target="_blank" rel="follow" title="База патентів України">Вантажозахоплювальний агрегат</a>
Магнітоелектричний вантажозахоплювальний пристрій
Номер патенту: 5705
Опубліковано: 15.03.2005
Автори: Лазарев Георгій Венедиктович, Рибка Яків Володимирович, Клименко Віктор Микитович
МПК: B66C 1/00
Мітки: вантажозахоплювальний, магнітоелектричний, пристрій
Формула / Реферат:
Магнітоелектричний вантажозахоплювальний пристрій, який має рухому частину і виконану складовою відносно нерухому частину, принаймні один постійний магніт, зовнішні робочі поверхні для утримування вантажу, при цьому нерухома частина включає просторово відділені одна від одної складові частини, а на рухомій частині розміщено принаймні одну пару полюсів, який відрізняється тим, що нерухома частина виконана у вигляді статора, на внутрішніх...
Електрогідравлічний прямоточний агрегат
Номер патенту: 65642
Опубліковано: 15.04.2004
Автор: Кекот Олег Володимирович
МПК: H02K 7/18
Мітки: агрегат, прямоточний, електрогідравлічний
Формула / Реферат:
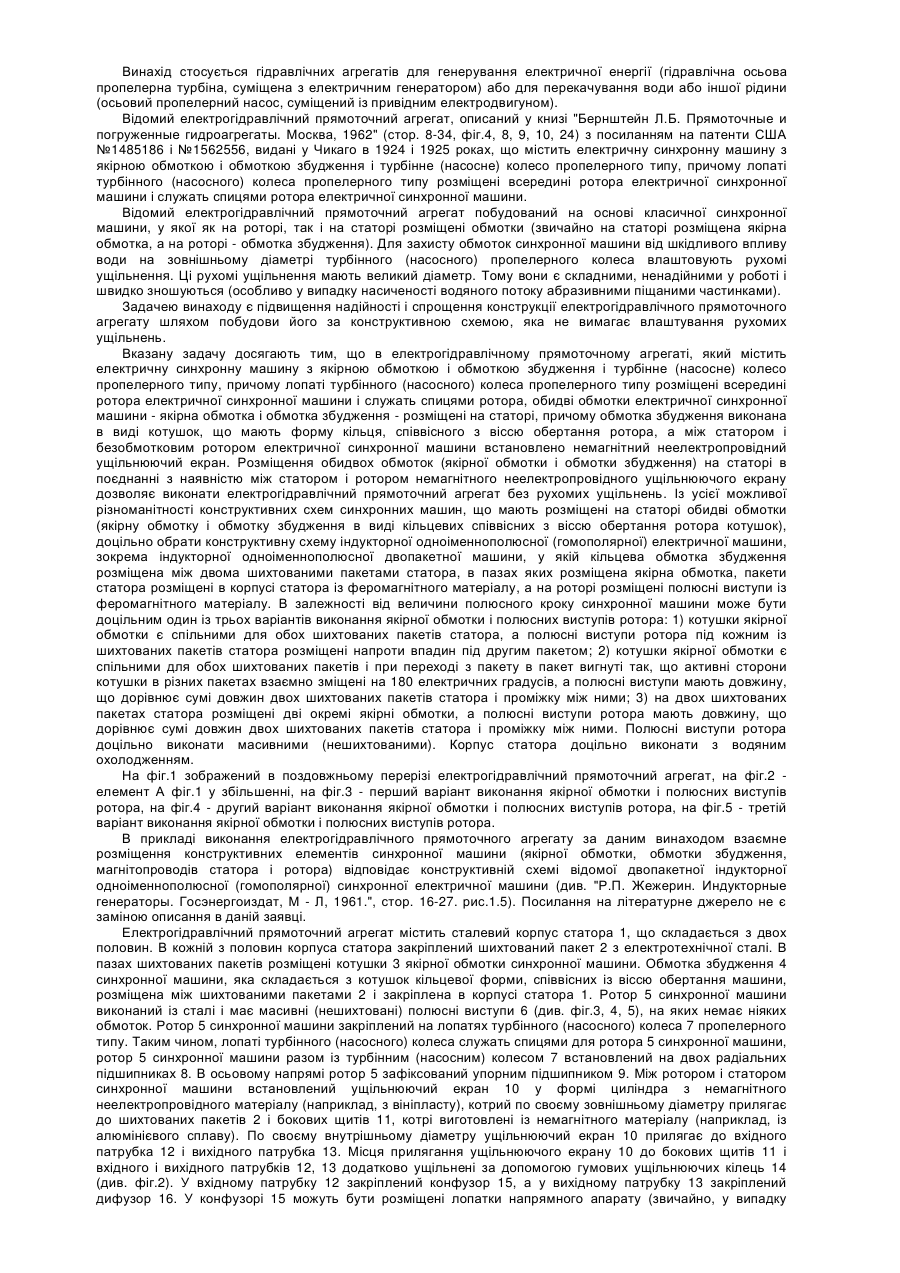
1. Електрогідравлічний прямоточний агрегат, що містить електричну синхронну машину з якірною обмоткою і обмоткою збудження і турбінне (насосне) колесо пропелерного типу, причому лопаті турбінного (насосного) колеса пропелерного типу розміщені всередині ротора електричної синхронної машини і служать спицями ротора електричної синхронної машини, який відрізняється тим, що обидві обмотки електричної синхронної машини - якірна обмотка і обмотка...
Вантажозахоплювальний пристрій
Номер патенту: 12601
Опубліковано: 15.02.2006
Автори: Панченко Луіза Алямшаївна, Шабалдак Микола Васильович, Шабан Зінаїда Олександрівна
МПК: B66C 1/42
Мітки: вантажозахоплювальний, пристрій
Формула / Реферат:
1. Вантажозахоплювальний пристрій, що містить штангу, на кінцях якої розміщені важелі і механізм управління положенням цих важелів, який відрізняється тим, що один з важелів встановлено з можливістю поздовжнього переміщення за допомогою механізму управління положенням важелів, який виконано у вигляді притискної гайки, в канавці якої встановлено повзун і яка переміщується по штанзі за допомогою обертання воротка, при цьому важелі обладнано...
Вантажозахоплювальний механізм
Номер патенту: 429
Опубліковано: 12.11.1999
Автори: Анохін Юрій Олександрович, Карпов Володимир Петрович, Власенко Віктор Іванович, Омельченко Володимир Іванович
Мітки: механізм, вантажозахоплювальний
Формула / Реферат:
1. Вантажозахоплювальний механізм, що містить два шарнірно сполучених важелі з вантажозахоплювальними кінцями, який відрізняється тим, що один із важелів виконаний із вушком з боку, протилежному вантажозахоплювальному кінцю цього важеля, з можливістю-з'єднання з вантажопідйомним механізмом, а другий важіль постачений регульованим фіксатором відносного кута повороту зазначених важелів у їхньому шарнірному з'єднанні.2....
Вантажозахоплювальний пристрій
Номер патенту: 10689
Опубліковано: 15.11.2005
Автори: Шабалдак Микола Васильович, Шабан Зінаїда Олександрівна
МПК: B66C 1/10
Мітки: пристрій, вантажозахоплювальний
Формула / Реферат:
Вантажозахоплювальний пристрій, який містить траверсу, у вушках якої закріплені кінці тросової тяги, що обгинає систему блоків, взаємозв'язану зі стропами для кріплення вантажу, який відрізняється тим, що траверса виконана у вигляді верхньої і нижньої балок, і верхня балка включає два подовжніх швелери, встановлені з зазором один до одного, полиці профілю швелерів спрямовані назовні, торці швелерів з’єднані торцевими планками, при цьому...
Попередній патент: Пристрій для випробування будівельних конструкцій під навантаженням
Наступний патент: Спосіб резекції печінки
Випадковий патент: Спосіб вирощування сільськогосподарських культур