Безконтактний вимірювач постійного струму в підземних трубопроводах
Формула / Реферат
Безконтактний вимірювач постійного струму в підземних трубопроводах, що включає в себе перший і другий сприймачі (первинні перетворювачі) магнітного поля, штангу, блок збудження, перший. підсилювач, вихідний індикатор, індуктивну котушку, індикатор нуля, кутомір, причому сприймачі магнітного поля, котушка і кутомір штивно закріплені на штанзі в площині перпендикулярній трубопроводу, вимірювальні осі першого і другого сприймачів магнітного поля перпендикулярні осі штанги, вихід першого сприймача поля з'єднаний з першим підсилювачем, перший вихід блока збудження з'єднаний з відповідними входами першого і другого сприймачів поля, вихід індуктивної котушки з'єднаний з входом індикатора нуля, який відрізняється тим, що в нього додатково введені другий підсилювач, блок компенсації, перший і другий синхронні детектори, перший і другий фільтри низьких частот, перший і другий смугові фільтри, індикатор компенсації, перший і другий випрямлячі, перший, другий, третій блоки перемноження, блок ділення, причому вісь індуктивної котушки орієнтована вздовж осі штанги, вихід другого сприймача поля з'єднаний з входом другого підсилювача, виходи першого і другого підсилювачів підключені до перших входів відповідно першого і другого синхронних детекторів, другі входи яких з'єднані з другим виходом блоку збудження, виходи першого і другого синхронних детекторів з'єднані з входами відповідно перших і других фільтрів низьких частот та смугових фільтрів, вихід першого фільтра низьких частот з'єднаний з індикатором компенсації та з входом блока компенсації, який споряджений вузлом управління, вихід блока компенсації, з'єднаний з компенсаційними входами першого і другого сприймачів (первинних перетворювачів) магнітного поля, виходи першого і другого смугових фільтрів з'єднані з входами відповідно першого і другого випрямлячів, виходи яких з'єднані з першими та другими входами відповідно блоку віднімання і першого блоку перемноження, вихід блоку віднімання з'єднаний з першим і другим входами другого блоку перемноження, вихід якого підключений до входу дільника блоку ділення, вхід діленого блоку ділення з'єднаний з виходом першого блоку перемноження, вихід блоку ділення з'єднаний з першим входом третього блоку перемноження, другий вхід якого з'єднаний з виходом другого фільтра низької частоти, а вихід третього блоку перемноження з'єднаний з вихідним індикатором.
Текст
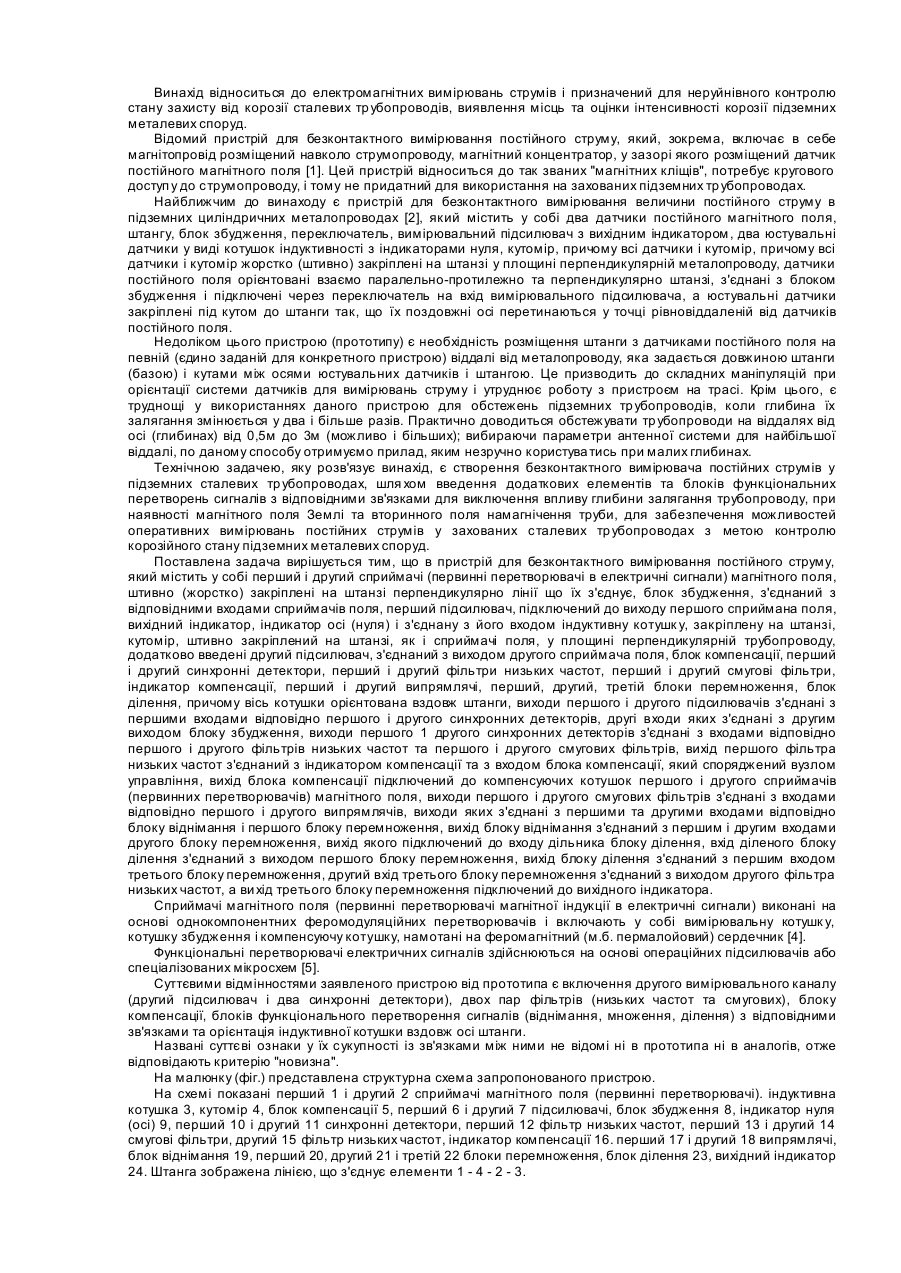
Винахід відноситься до електромагнітних вимірювань струмів і призначений для неруйнівного контролю стану захисту від корозії сталевих тр убопроводів, виявлення місць та оцінки інтенсивності корозії підземних металевих споруд. Відомий пристрій для безконтактного вимірювання постійного струму, який, зокрема, включає в себе магнітопровід розміщений навколо струмопроводу, магнітний концентратор, у зазорі якого розміщений датчик постійного магнітного поля [1]. Цей пристрій відноситься до так званих "магнітних кліщів", потребує кругового доступ у до струмопроводу, і тому не придатний для використання на захованих підземних тр убопроводах. Найближчим до винаходу є пристрій для безконтактного вимірювання величини постійного струму в підземних циліндричних металопроводах [2], який містить у собі два датчики постійного магнітного поля, штангу, блок збудження, переключатель, вимірювальний підсилювач з вихідним індикатором, два юстувальні датчики у виді котушок індуктивності з індикаторами нуля, кутомір, причому всі датчики і кутомір, причому всі датчики і кутомір жорстко (штивно) закріплені на штанзі у площині перпендикулярній металопроводу, датчики постійного поля орієнтовані взаємо паралельно-протилежно та перпендикулярно штанзі, з'єднані з блоком збудження і підключені через переключатель на вхід вимірювального підсилювача, а юстувальні датчики закріплені під кутом до штанги так, що їх поздовжні осі перетинаються у точці рівновіддаленій від датчиків постійного поля. Недоліком цього пристрою (прототипу) є необхідність розміщення штанги з датчиками постійного поля на певній (єдино заданій для конкретного пристрою) віддалі від металопроводу, яка задається довжиною штанги (базою) і кутами між осями юстувальних датчиків і штангою. Це призводить до складних маніпуляцій при орієнтації системи датчиків для вимірювань струму і утруднює роботу з пристроєм на трасі. Крім цього, є труднощі у використаннях даного пристрою для обстежень підземних тр убопроводів, коли глибина їх залягання змінюється у два і більше разів. Практично доводиться обстежувати тр убопроводи на віддалях від осі (глибинах) від 0,5м до 3м (можливо і більших); вибираючи параметри антенної системи для найбільшої віддалі, по даному способу отримуємо прилад, яким незручно користува тись при малих глибинах. Технічною задачею, яку розв'язує винахід, є створення безконтактного вимірювача постійних струмів у підземних сталевих тр убопроводах, шля хом введення додаткових елементів та блоків функціональних перетворень сигналів з відповідними зв'язками для виключення впливу глибини залягання трубопроводу, при наявності магнітного поля Землі та вторинного поля намагнічення труби, для забезпечення можливостей оперативних вимірювань постійних струмів у захованих сталевих тр убопроводах з метою контролю корозійного стану підземних металевих споруд. Поставлена задача вирішується тим, що в пристрій для безконтактного вимірювання постійного струму, який містить у собі перший і другий сприймачі (первинні перетворювачі в електричні сигнали) магнітного поля, штивно (жорстко) закріплені на штанзі перпендикулярно лінії що їх з'єднує, блок збудження, з'єднаний з відповідними входами сприймачів поля, перший підсилювач, підключений до виходу першого сприймана поля, вихідний індикатор, індикатор осі (нуля) і з'єднану з його входом індуктивну котушк у, закріплену на штанзі, кутомір, штивно закріплений на штанзі, як і сприймачі поля, у площині перпендикулярній трубопроводу, додатково введені другий підсилювач, з'єднаний з виходом другого сприймача поля, блок компенсації, перший і другий синхронні детектори, перший і другий фільтри низьких частот, перший і другий смугові фільтри, індикатор компенсації, перший і другий випрямлячі, перший, другий, третій блоки перемноження, блок ділення, причому вісь котушки орієнтована вздовж штанги, виходи першого і другого підсилювачів з'єднані з першими входами відповідно першого і другого синхронних детекторів, другі входи яких з'єднані з другим виходом блоку збудження, виходи першого 1 другого синхронних детекторів з'єднані з входами відповідно першого і другого фільтрів низьких частот та першого і другого смугових фільтрів, вихід першого фільтра низьких частот з'єднаний з індикатором компенсації та з входом блока компенсації, який споряджений вузлом управління, вихід блока компенсації підключений до компенсуючих котушок першого і другого сприймачів (первинних перетворювачів) магнітного поля, виходи першого і другого смугових фільтрів з'єднані з входами відповідно першого і другого випрямлячів, виходи яких з'єднані з першими та другими входами відповідно блоку віднімання і першого блоку перемноження, вихід блоку віднімання з'єднаний з першим і другим входами другого блоку перемноження, вихід якого підключений до входу дільника блоку ділення, вхід діленого блоку ділення з'єднаний з виходом першого блоку перемноження, вихід блоку ділення з'єднаний з першим входом третього блоку перемноження, другий вхід третього блоку перемноження з'єднаний з виходом другого фільтра низьких частот, а ви хід третього блоку перемноження підключений до вихідного індикатора. Сприймачі магнітного поля (первинні перетворювачі магнітної індукції в електричні сигнали) виконані на основі однокомпонентних феромодуляційних перетворювачів і включають у собі вимірювальну котушк у, котушку збудження і компенсуючу котушку, намотані на феромагнітний (м.б. пермалойовий) сердечник [4]. Функціональні перетворювачі електричних сигналів здійснюються на основі операційних підсилювачів або спеціалізованих мікросхем [5]. Суттєвими відмінностями заявленого пристрою від прототипа є включення другого вимірювального каналу (другий підсилювач і два синхронні детектори), двох пар фільтрів (низьких частот та смугових), блоку компенсації, блоків функціонального перетворення сигналів (віднімання, множення, ділення) з відповідними зв'язками та орієнтація індуктивної котушки вздовж осі штанги. Названі суттєві ознаки у їх сукупності із зв'язками між ними не відомі ні в прототипа ні в аналогів, отже відповідають критерію "новизна". На малюнку (фіг.) представлена структурна схема запропонованого пристрою. На схемі показані перший 1 і другий 2 сприймачі магнітного поля (первинні перетворювачі). індуктивна котушка 3, кутомір 4, блок компенсації 5, перший 6 і другий 7 підсилювачі, блок збудження 8, індикатор нуля (осі) 9, перший 10 і другий 11 синхронні детектори, перший 12 фільтр низьких частот, перший 13 і другий 14 смугові фільтри, другий 15 фільтр низьких частот, індикатор компенсації 16. перший 17 і другий 18 випрямлячі, блок віднімання 19, перший 20, другий 21 і третій 22 блоки перемноження, блок ділення 23, вихідний індикатор 24. Штанга зображена лінією, що з'єднує елементи 1 - 4 - 2 - 3. Пристрій працює наступним чином. Індикатор нуля 9 і смугові фільтри 13 і 14 настроюють на частоту змінного струму (на другу гармоніку струму промислової частоти при наявності працюючої станції катодного захисту, або на частоту генератора, підключеного до трубопроводу і заземлення). За показами індикатора нуля 9 і кутоміра 4, оператор орієнтує штангу (з сприймачами поля 1 і 2) вздовж прямої, що проходить через вісь трубопроводу, паралельно компоненті магнітного поля Землі перпендикулярно трубопроводу. Кут між названою компонентою поля Землі і вертикаллю визначається за геомагнітними картами і напрямом (магнітним азимутом) трубопроводу, або експериментально заявленим пристроєм, на віддалі від труби, за показами індикатора 16 при виключеному блоці компенсації 5, шляхом поворотів штанги з сприймачем поля 1 і кутоміром 4. За цим кутом оператор встановлює нахил штанги відносно вертикалі, отже сприймачі поля 1 і 2 орієнтуються перпендикулярно до геомагнітного поля, а за нульовими показами індикатора 9 сприймачі поля 1 і 2 додатково орієнтуються азимутально відносно трубопроводу. Сприймачі поля 1 і 2 здійснюють первинне феромодуляційне перетворення вимірюваної магнітної індукції в е.р.с. вищи х гармонік струму збудження. Сигнали від сприймачів 1 і 2 поступають у підсилювачі 6 і 7 настроєні на другу гармоніку струм у генератора збудження 8. Синхронні детектори 10 і 11 з опорною частотою генератора 8 детектують підсилені у 6 і 7 вхідні сигнали в спектр низьких частот, що відповідає діапазону частот вимірюваних струмів. Фільтри низьких частот 12 і 15 та смугові фільтри 13 і 14 виділяють відповідно постійні і змінні складові сигналу, пропорційні відповідним складовим поля струмів що контролюються. За величиною і полярністю постійного сигналу з першого каналу, блок компенсації 5 видає постійний струм у компенсуючі котушки сприймачів 1 і 2 таким чином, щоби повністю скомпенсувати постійне магнітне поле в сприймачі 1; струм компенсації регулюється вузлом управління, керування яким здійснюється оператором вручну (за показами індикатора компенсації 16), або автоматично (з використанням включеного у вузол управління інвертуючого підсилювача, на вхід якого подається сигнал з першого фільтра низьких частот 12). При цьому сигнал U0 на виході другого ФНЧ 15 пропорційний різниці ортогональних штанзі компонент постійного магнітного поля у точках розміщення сприймачів 1 і 2 де k0 - коефіцієнт перетворення постійного магнітного поля в електричну напругу. З смугови х фільтрів сигнали, пропорційні відповідним компонентам напруженості змінного поля, проходять випрямлення у блоках 17 і 18, на вихода х яких де коефіцієнти перетворення змінного магнітного поля доцільно вибирати рівними між собою k1 = k2. Функціональні перетворення цих сигналів у блоках віднімання 19, піднесення до квадрату 21, множення 20, ділення 23 та множення 20 приводять (з врахуванням коефіцієнтів перетворень) до величини вихідного сигналу Величина постійного струму 1, що протікає по трубопроводу, як відомо з [3], визначається формулою Співставляючи (4) з (3), бачимо, що на вихідний індикатор пристрою поступає напруга пропорційна величині вимірюваного постійного струму. Якщо задати коефіцієнти перетворення такими, щоб виконувалась умова де b - віддаль між сприймачами поля 1 і 2, то вихідний індикатор 24 показує величину струм у і в трубопроводі, незалежно від глибини його залягання. За полярністю вихідного сигналу в індикаторі 24, з врахуванням орієнтації сприймачів поля 1 і 2, визначають напрям постійного струму в підземному трубопроводі. Практичне використання запропонованого пристрою передбачає переміщення його вздовж траси і вимірювання струму в різних точках тр убопроводу. За діаграмою розподілу постійного струму контролюють стан протикорозійного захисту, виявляють катодні і анодні зони, за густиною стікаючого струму оцінюють інтенсивність корозії трубопроводу і з'єднаних з ним підземних металевих споруд. Переваги запропонованого пристрою в порівнянні з прототипом полягають у спрощенні процедури орієнтації антенної системи (штанги з сприймачами поля) відносно трубопроводу і забезпеченні можливості вимірювань постійного струму без обмеження на глибину залягання трубопроводу, що дозволяє проводити оперативні корозійні обстеження підземних сталевих трубопроводів методом безконтактних вимірювань постійних стр умів.
ДивитисяДодаткова інформація
Назва патенту англійськоюContactless measuring device for direct current in underground pipelines
Автори англійськоюDzhala Roman Mykhailovych, Seniuk Oleh Ivanovych
Назва патенту російськоюБесконтактный измеритель постоянного тока в подземных трубопроводах
Автори російськоюДжала Роман Михайлович, Сенюк Олег Иванович
МПК / Мітки
МПК: G01R 19/00, C23F 13/00
Мітки: трубопроводах, вимірювач, безконтактний, підземних, постійного, струму
Код посилання
<a href="https://ua.patents.su/3-22025-bezkontaktnijj-vimiryuvach-postijjnogo-strumu-v-pidzemnikh-truboprovodakh.html" target="_blank" rel="follow" title="База патентів України">Безконтактний вимірювач постійного струму в підземних трубопроводах</a>
Безконтактний вимірювач струму в трубопроводі
Номер патенту: 250
Опубліковано: 30.04.1993
Автори: Вербенець Богдан Ярославович, Джала Роман Михайлович
МПК: G01R 19/00, G01R 33/02
Мітки: трубопроводі, безконтактний, вимірювач, струму
Формула / Реферат:
Ф о р м у л а и з о б р е т е н и яБесконтактный измеритель тока в трубопроводе, содержащий первый и второй однокомпонентные датчики магнитного поля„ расположенные в плоскости, перпендикулярной трубопроводу, последовательно включенные усилитель, амплитудный детектор и выходкой индикатор, причем обмотки датчика соединены последовательно, о т л и ч а ю щ и й с я тем, что, с целью повышения производительности за счет улучшения...
Спосіб безконтактного вимірювання струму і глибини закладення захованих лінійних підземних провідників
Номер патенту: 20821
Опубліковано: 07.10.1997
Автори: Дуб Петро Богданович, Мізюк Леонід Якович
МПК: G01R 19/00
Мітки: лінійних, закладення, глибини, безконтактного, струму, провідників, вимірювання, підземних, захованих, спосіб
Формула / Реферат:
Спосіб безконтактного вимірювання струму і глибини закладення захованих лінійних підземних провідників, який полягає у тому, що два Ідентичні перетворювачі магнітного поля з паралельними осями чутливості розташовують на різній відстані від провідника в площині, перпендикулярній його осі, а значення струму і глибини визначають непрямим шляхом з результатів двох вимірювальних операцій, у першій з яких вимірюють різницю вихідних напруг обох...
Пристрій для виявлення течі в підземних трубопроводах
Номер патенту: 4250
Опубліковано: 27.12.1994
Автори: Дюков Володимир Андрійович, Рюмшин Микола Олександрович
МПК: F17D 5/02
Мітки: підземних, трубопроводах, течії, пристрій, виявлення
Формула / Реферат:
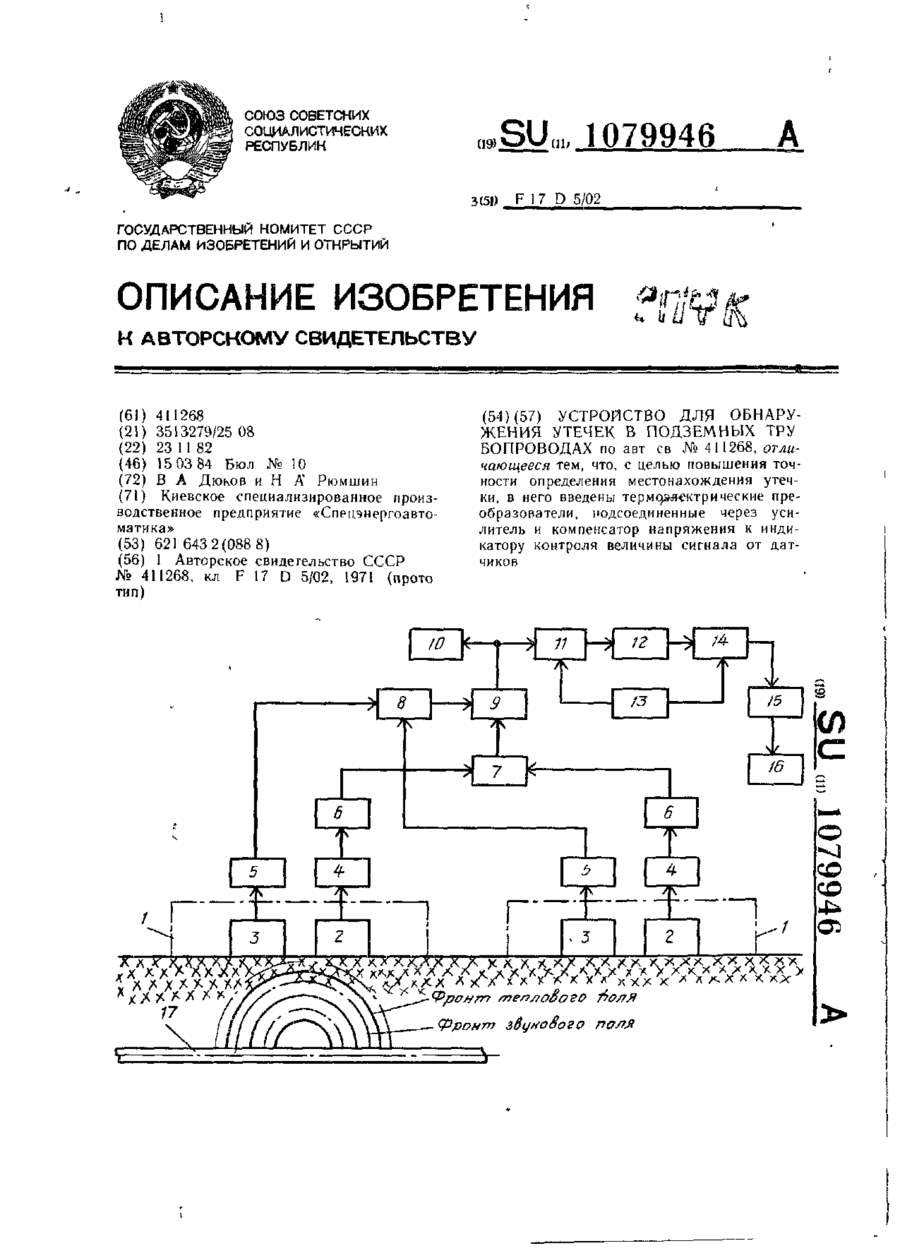
Устройство для обнаружения утечек в подземных трубопроводах по авт. св.№ 411268, отличающееся тем, что, с целью повышения точности определения местонахождения утечки, в него введены термоэлектрические преобразователи, подсоединенные через усилитель и компенсатор напряжения к индикатору контроля величины сигнала от датчиков.
Перетворювач енергії змінного струму на вході в енергію постійного струму на виході для живлення дугового навантаження
Номер патенту: 3021
Опубліковано: 26.12.1994
Автори: Саньков Сергій Анатолійович, Бродський Гелій Михайлович, Маш'янов Володимир Гаврилович, Магда Володимир Васильович
МПК: H02M 7/10, H05B 7/144
Мітки: змінного, вході, живлення, енергію, перетворювач, постійного, навантаження, дугового, струму, виході, енергії
Формула / Реферат:
Преобразователь энергии переменного тока на входе в энергию постоянного тока на выходе для питания дуговой нагрузки, содержащий первую и вторую трехфазные нулевые управляемые вентильные группы, выводы переменного тока которых предназначены для соединения через вторичные обмотки питающего трансформатора, и уравнительный реактор с первым выводом для подключения нагрузки, трехфазную мостовую неуправляемую вентильную группу, выводы переменного...
Електропривод постійного струму

Номер патенту: 4618
Опубліковано: 28.12.1994
Автор: Сороченко Микола Іванович
МПК: H02P 7/06
Мітки: струму, постійного, електропривод
Формула / Реферат:
Электропривод постоянного тока, содержащий электродвигатель, якорная обмотка которого подключена к тиристорному преобразователю с блоком управления, входы обратных связей и задания блока управления соединены с датчиками тока, скорости, положения и задатчиком режима работы, программируемый таймер, счетный вход которого подключен к генератору импульсов, а информационные входы и выходы, а также выход переполнения этого таймера подключены к...
Попередній патент: Спосіб вимірювання вологості тонкоподрібнених залізорудних матеріалів
Наступний патент: Спосіб одержання n,n -ді-2нафтилпарафенілендіаміну
Випадковий патент: Модуляційно-поляризаційний біосенсор