Пристрій реєстрації та оцінки параметрів висіву
Номер патенту: 22421
Опубліковано: 25.04.2007
Автори: Кондратець Василь Олександрович, Лук'яненко Олексій Олексійович, Пархоменко Михайло Давидович, Пархоменко Юрій Михайлович
Формула / Реферат
Пристрій реєстрації та оцінки параметрів висіву, що складається з блока синхронізації, двокоординатного оптико-електронного блока реєстрації, блока розпізнавання об'єктів та ЕОМ, який відрізняється тим, що до нього введено генератор імпульсів просування адреси, з'єднаний з лічильником швидкості та вузлом формування сигналів просування, вихід якого з'єднано з лічильником адреси та регістром адреси розвантаження, входи якого з'єднано з лічильником адреси, а виходи лічильника та регістра адреси через комутатор адреси під'єднані до модуля пам'яті, з'єднаного з вузлом блокування та лічильником даних, виходи якого під'єднані до модуля пам'яті, вхід вузла формування сигналів завантаження та розвантаження з'єднано з блоком розпізнавання об'єктів, а вихід під'єднано через схеми логіки, з'єднані по входах з вузлом блокування, до входів лічильника даних, модуля пам'яті та ЕОМ, виходи блока синхронізації з'єднані з входами лічильників даних, адреси та швидкості, вузлів формування сигналів просування, завантаження та розвантаження, а також комутатора адреси.
Текст
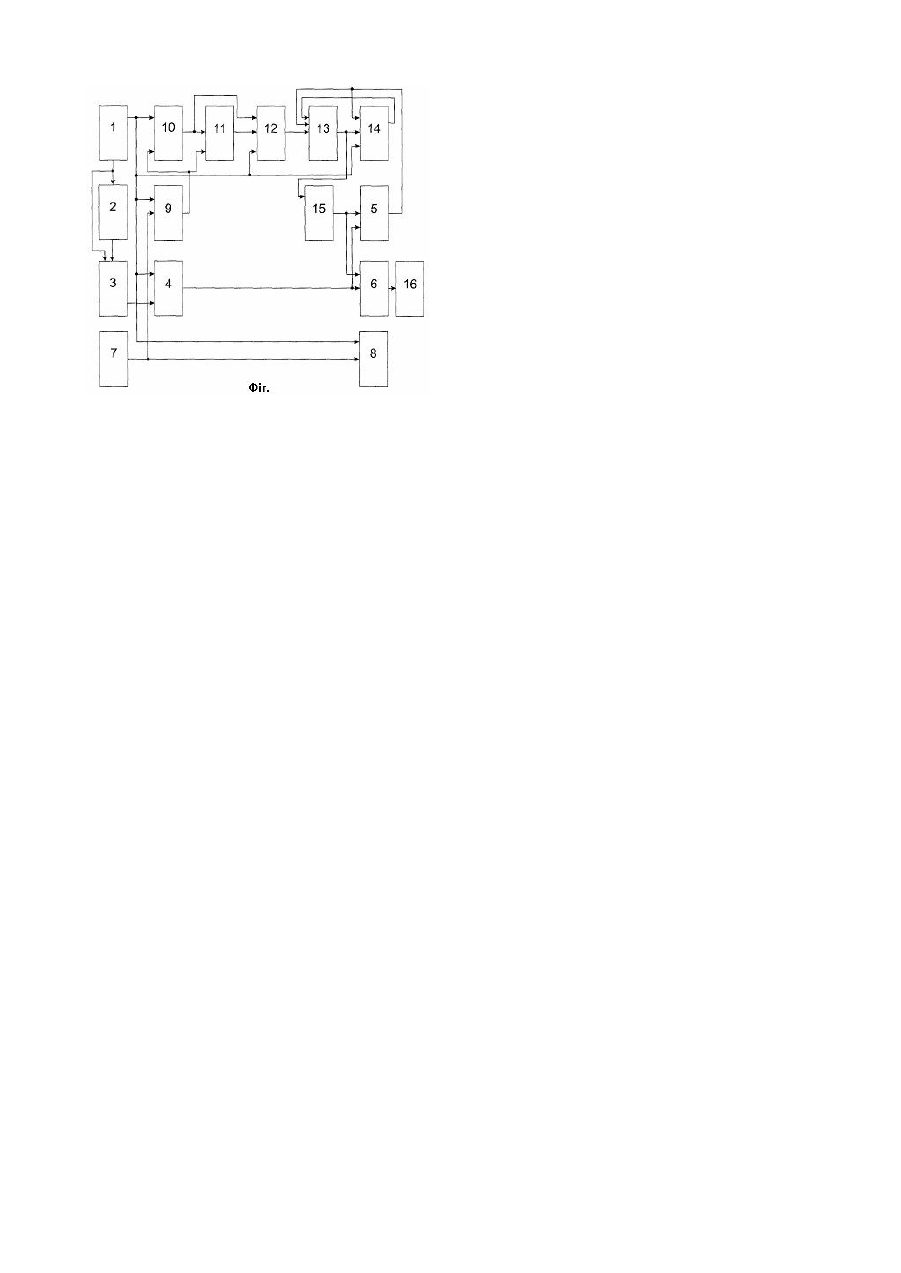
Корисна модель відноситься до сільськогосподарського машинобудування, а саме до пристроїв реєстрації насіння в потоці, що формується різними типами висівних апаратів сівалок. Відомий стенд, що включає висівний апарат з електромеханічним приводом, під яким на рівні дна борозни, із швидкістю сівалки Vс, переміщується «нескінченна» липка стрічка, на яку укладається насіння [1]. Більш досконалим та близьким по технічній суті є пристрій реєстрації насіння в потоці, обраний як прототип, що включає блок синхронізації, двохкоординатний оптико-електронний блок реєстрації, який встановлюється на рівні дна борозни, блок розпізнавання об'єктів та ЕОМ [2]. На виході блока розпізнавання об'єктів в моменти перетину насінинами площини реєстрації пристрою формуються сигнали сходження об'єктів, які надходять до ЕОМ. Недоліками стенда, взятого як аналог, є недосконалість методів вимірювання та обчислення параметрів висіяного на стрічку потоку насіння, велика трудомісткість, низька культура та умови роботи дослідника, значні експлуатаційні витрати на електроживлення, посівні і супутні матеріали та приміщення, де встановлено стенд. Недоліком пристрою-прототипу є порівняно низька точність визначення відстаней між сусідніми насінинами вздовж рядка висіву, яка досягає половини довжини зони контролю пристрою вздовж координати виміру, оскільки сигнали сходження об'єктів формуються без урахування швидкості руху сівалки. Задачею корисної моделі є підвищення точності виміру відстаней між сусідніми насінинами вздовж рядка висіву з урахуванням швидкості руху сівалки та підвищення ефективності оцінки щільності розподілу насіння в рядку. Вирішення поставленої задачі досягається тим, що в пристрій-прототип введено генератор імпульсів просування адреси, лічильник швидкості, лічильник адреси, регістр адреси розвантаження, комутатор адреси, модуль пам'яті, лічильник даних, вузол формування сигналів просування адреси, вузол формування сигналів завантаження та розвантаження комірок пам'яті, вузол блокування та схеми логіки, що дозволяє узгоджувати моменти формування вихідних сигналів розвантаження комірок пам'яті, в яких накопичуються дані про об'єкти з координатами місця їх реєстрації в зоні контролю та швидкістю руху сівалки, а також оцінювати щільність розподілу насіння в рядку. Суть корисної моделі пояснюється кресленням (див. Фіг.) на якому представлена структурна схема пристрою реєстрації та оцінки параметрів висіву. Запропонований пристрій складається з блока синхронізації 1, блока реєстрації 2, блока розпізнавання об'єктів 3, з'єднаного з вузлом формування сигналів завантаження та розвантаження комірок пам'яті 4, вихід якого з'єднано з схемами логіки 5 та 6. Генератор імпульсів просування адреси 7 з'єднаний з лічильником швидкості 8 та вузлом формування сигналів просування адреси 9, вихід якого з'єднаний з лічильником адреси 10 та регістром адреси розвантаження 11. Виходи лічильника адреси 10 з'єднано з комутатором адреси 12 та регістром адреси розвантаження 11, виходи якого також з'єднано з комутатором адреси 12, який під'єднано до адресних входів модуля пам'яті 13. Виходи модуля пам'яті 13 з'єднано з лічильником даних 14 та вузлом блокування 15, вихід якого під'єднано до схем логіки 5 та 6, а виходи лічильника даних 14 з'єднано з входами модуля пам'яті 13. Вихід схеми логіки 5 з'єднано з керуючими входами лічильника даних 14 та модуля пам'яті 13. Вихід схеми логіки 6 з'єднано з ЕОМ 16. Ви ходи блока синхронізації під'єднані до вузлів формування 4, 9, комутатора адреси 12, вузла блокування 15 та лічильників даних 14 і швидкості 8. Пристрій реєстрації та оцінки параметрів висіву працює наступним чином. Потік насіння, що формується висівним апаратом сівалки, перетинає площину контролю блока реєстрації 1 пристрою (див. Фіг.), створену лінійками дискретних оптронних пар (n розрядів по координаті X, направленій вздовж напрямку руху сівалки, та m розрядів по координаті Y, направленій поперек руху), яка розміщена на рівні дна борозни. В результаті аналізу n+m розрядного двійкового коду зображення площини контролю, що безперервно надходить від блока реєстрації 2, на виході блока розпізнавання 3, в моменти перетину насінинами площини контролю, формуються сигнали сходження об'єктів СХк з координатами місця їх реєстрації Хk (k Î [0, n]) на осі X. Модуль пам'яті 13 також має n+m комірок, тобто його адресний простір співпадає з адресним простором блока розпізнавання 3. Для того, щоб оцінити щільність розподілу насіння, розрядність модуля пам'яті k визначається максимальною кількістю насіння Q, яке може попадати в одну комірку Q=2k. Лічильник адресу 10 працює синхронно з лічильником головної адресної магістралі пристрою. До зони завантаження відносяться ті комірки модуля пам'яті, адреси яких формуються під час обробки даних координати Х блоком розпізнавання 3. Ці адреси з виходу лічильника 10 поступають на входи модуля пам'яті 13 через комутатор адреси 12. Завантаження комірок модуля пам'яті здійснюється наступним чином. Кожний сигнал сходження об'єкта СХк з блока розпізнавання 3 через вузол формування 4 та схему ло гіки 5, за відсутності сигналу блокування вузла 15 (виробляється під час обробки позицій координати У за умови, що комірка розвантаження порожня), збільшує вміст лічильника даних 14, який попередньо був зчитаний з модуля пам'яті 13, на одиницю і заносить отриманий результат в модуль пам'яті за адресою зчитування. Адреси комірок модуля пам'яті і адреси позицій блока розпізнавання формуються синхронно, але не співпадають після появи першого ж імпульсу просування адреси комірок пам'яті. Заповнення комірок здійснюється на протязі усього проміжку часу між появою імпульсів просування, тобто коли адреси не змінюються. Зафіксоване в кожній комірці число сигналів сходження відповідає кількості зареєстрованих об'єктів. Просування адрес комірок пам'яті здійснюється дискретно з періодом Tпк , залежним від швидкості руху сівалки Vс h Tпк = (1) Vc де h - крок дискретизації площини реєстрації вздовж координат Х та У; Тпк - період просування адрес комірок пам'яті, який дорівнює часу проходження сівалкою відстані h із швидкістю Vс . Методика встановлення періоду просування адрес комірок пам'яті Тпк , швидкості руху Vс та розрахунку залікового інтервалу tзал визначається із співвідношень t S зал = Vc × t зал = h × зал = h × N c Tпк (2) h Vc = × Nc = C × Nc t зал де: Sзал - відстань, яку проходить сівалка за термін часу tзал із швидкістю Vc; Nc - число, пропорційне швидкості руху сівалки, що визначається виразом Nc=tзал/Тпк ; С - коефіцієнт пропорційності, який визначає одиницю виміру швидкості (С=h/tзал): при С=10-2, tзал=h/10-2, а Vc=Nc(м/с). Виходячи з означеного, швидкість руху сівалки Vc=Nc(м/с) визначається числом імпульсів просування адрес комірок пам'яті, що надійшли на вхід лічильника швидкості 8 від генератора 7 за заліковий термін часу tзал, заданий блоком синхронізації 1. Встановлення заданої швидкості здійснюється шляхом регулювання періоду надходження імпульсів просування Тпк в генераторі 7. При надходженні імпульсу просування від генератора 7, в момент переходу від обробки позицій координати Х на У, по сигналу Х/У від блока синхронізації 1 на виході вузла 9 формується сигнал просування, який блокує роботу лічильника адреси 10 на протязі одного тактового синхроімпульсу, які безперервно надходять від блока синхронізації 1 і заносить зафіксовану на даний момент адресу з виходу лічильника 10 в регістр адреси розвантаження 11. Цією адресою завжди є адреса останньої комірки зони завантаження. При цьому відбувається просування комірок модуля пам'яті на одну позицію праворуч, адреса останньої, на даний момент, комірки координати Х виходить за межі зони завантаження і стає адресою комірки розвантаження, адреса останньої за дією координати У комірки модуля пам'яті переходить в зону дії нульової позиції зони завантаження. Таким чином, з надходженням кожного імпульсу просування здійснюється циклічне переміщення адрес комірок модуля пам'яті із швидкістю руху сівалки по відношенню до позицій зони завантаження блока розпізнавання об'єктів. Розвантаження комірки модуля пам'яті здійснюється під час обробки даних координати Y блоком розпізнавання. При цьому адреса комірки з регістра адреси 11, через комутатор 12 надходить до модуля пам'яті 13. Сигнали розвантаження, які формуються на виході вузла 4, за відсутності сигналу блокування від вузла 15 (комірка не порожня), проходять через схему логіки 5 і зменшують кожного разу вміст реверсивного лічильника даних 14, зчитаний попередньо з виходу модуля пам'яті 13, на одиницю і заносять отриманий результат з лічильника даних в модуль пам'яті. Ці ж сигнали розвантаження, за відсутності сигналу блокування від вузла 15, формують на виході схеми логіки 6 сигнали розвантаження комірок пам'яті, які передаються до ЕОМ 16. Адреси комірок завантаження і комірки розвантаження циклічно змінюються із швидкістю руху сівалки по відношенню до позицій блока розпізнавання об'єктів. Число сигналів розвантаження відповідає кількості зафіксованих в даній комірці об'єктів. Таким чином, визначивши часові проміжки між надходженнями сигналів розвантаження від сусідніх заповнених комірок ΔTi=ti+1-ti, де ti+1, ti - моменти реєстрації сигналів розвантаження комірок пам'яті в ЕОМ, можна визначити відстані між сусідніми насінинами вздовж рядка висіву за формулою ΔXi=Vc·ΔTi. Виміри часових проміжків і розрахунок відстаней між сусідніми насінинами здійснюється ЕОМ на підставі сигналів розвантаження. При цьому моменти формування сигналів розвантаження узгоджені з координатами місця реєстрації об'єктів СХк в площині контролю пристрою та швидкістю руху сівалки Vс. Похибку виміру відстаней між сусідніми насінинами визначимо на прикладі висіву насіння цукрового буряка при швидкості Vc=3,6км/год=1м/с та з заданою, згідно з агротехнічними вимогами, середньою відстанню між насінинами DХ=0,12м. Абсолютна похибка виміру відстані у пристрою-прототипу Dх досягає половини довжини зони контролю d=0,05¸0,1м вздовж координати виміру Dx=±d/2. Тоді відносна похибка дорівнює δх=Δх /DΧ=0,21¸0,42 або δх=21¸42%. Похибка виміру запропонованим пристроєм визначається з співвідношення DХ=Vc×DT. Абсолютна похибка встановлення швидкості дорівнює Dn=0,005м/с, а відносна - dn=Dn/Vc=0,005. Абсолютна похибка визначення моменту формування сигналу розвантаження Δt=D±Тin/2, а абсолютна похибка визначення часового проміжку DT=2×Dt=±Тin. Згідно з (1) період надходження імпульсів просування Тin=h/Vc, де h - крок дискретизації площини контролю блока реєстрації, h=0,002м. Звідси DТ= Тin=±0,002с. Часовий проміжок DT=DX/Vc=0,12с, тоді відносна похибка виміру часового проміжку dT=DТ /DT=0,017. Відносна похибка виміру відстані у запропонованого пристрою дорівнює dх=dn+dΤ=0,022 або dх=±2,2%. Згідно з агротехнічними вимогами похибка не повинна перевищувати ±3%. Отже, запропонований пристрій відповідає агротехнічним вимогам. Література: 1. Испытания сельскохозяйственной техники. Машины посевные. Программа и методы испытаний. ОСТ 70.5.1-82. М.: Госкомсельхозтехника СССР, 1983. -148с. 2. Авторское свидетельство СССР 1356981, кл. А01С7/00, G01D9/00, 1987.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice of recording and assessing the sowing parameters
Автори англійськоюParkhomenko Mykhailo Davydovych, Kondratets Vasyl Oleksandrovych, Parkhomenko Yurii Mykhailovych
Назва патенту російськоюУстройство регистрации и оценки параметров высева
Автори російськоюПархоменко Михаил Давыдович, Кондратец Василий Александрович, Пархоменко Юрий Михайлович
МПК / Мітки
Мітки: висіву, оцінки, реєстрації, пристрій, параметрів
Код посилання
<a href="https://ua.patents.su/3-22421-pristrijj-reehstraci-ta-ocinki-parametriv-visivu.html" target="_blank" rel="follow" title="База патентів України">Пристрій реєстрації та оцінки параметрів висіву</a>
Система контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 59128
Опубліковано: 15.07.2005
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G06F 15/00, F02C 9/28
Мітки: контролю, установки, реєстрації, силової, параметрів, літального, система, апарата
Формула / Реферат:
Напій лікеро-горілчаний, що включає водно-спиртову рідину з спирту етилового ректифікованого і води питної підготовленої, цукровий сироп 65,8 %-ний, кислоту лимонну, морс з ягід дикоростучої сировини, який відрізняється тим, що додатково містить ароматизатор "Клюква" з вмістом барвника "BELL FLAVORS FRAGRANCES GmbH" та бензоат натрію, взятих у відповідному співвідношенні інгредієнтів на 1000 дал напою: ...
Спосіб оцінки розузгодження силових параметрів рухів пальців руки людини та пристрій для його здійснення
Номер патенту: 65768
Опубліковано: 15.04.2004
Автори: Єфанова Світлана Григорівна, Шугуров Олег Олегович, Ільченко Євгенія Анатоліївна, Шугуров Олег Олексійович
МПК: A61B 5/11
Мітки: здійснення, людини, пристрій, параметрів, оцінки, руки, рухів, силових, розузгодження, спосіб, пальців
Формула / Реферат:
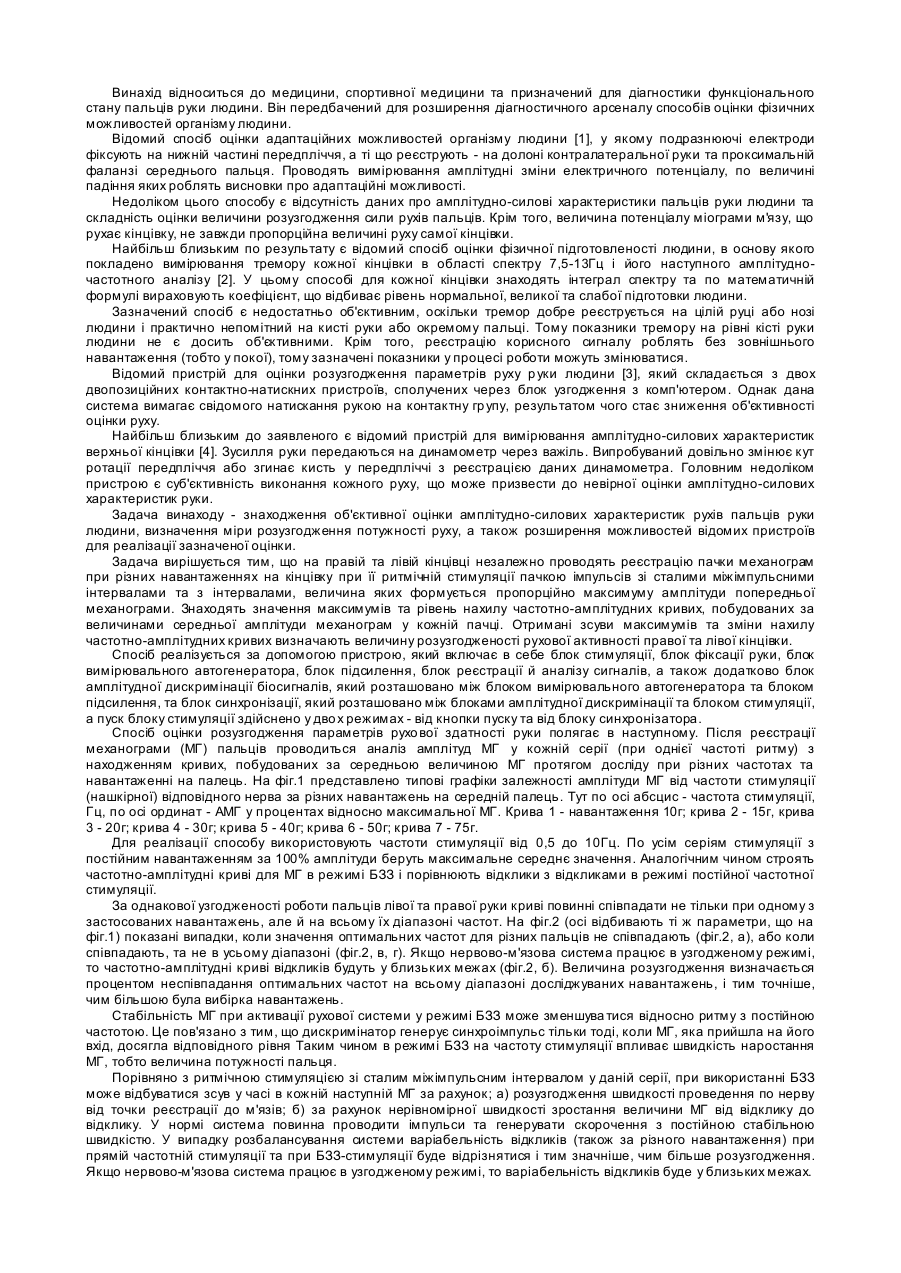
1. Спосіб оцінки розузгодження силових параметрів рухів пальців руки людини, який включає розташування подразних електродів на шкірній поверхні руки людини та реєстрацію механограм пальців чи кінцівок при ритмічній стимуляції нерва, що активує м'яз, який відрізняється тим, що на правій та лівій кінцівці незалежно проводять реєстрацію механограм при різних навантаженнях на кінцівку при її ритмічній стимуляції пачкою імпульсів зі сталими...
Пристрій для пошуку біологічно активних точок і реєстрації їх параметрів
Номер патенту: 4166
Опубліковано: 27.12.1994
Автори: Кадук Борис Григорович, Бакай Едуард Аполінарієвич, Камчачатний Юрій Григорович, Титор Павло Павлович
МПК: A61H 39/02
Мітки: пристрій, пошуку, точок, параметрів, біологічно, активних, реєстрації
Формула / Реферат:
Устройство для поиска биологически активных точек и регистрации их параметров, содержащее два индифферентных электрода, укрепленных на цилиндрическом корпусе, внутри которого соосно размещен подвижный держатель с активным электродом, механически связанный с концевым переключателем, через контакты которого электроды соединены с усилителем, подключенным к регистратору, отличающееся тем, что индифферентные электроды выполнены кольцевыми из...
Система контролю та реєстрації параметрів силової установки літального апарата
Номер патенту: 31643
Опубліковано: 15.07.2002
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: G06F 15/16, F02C 9/28
Мітки: силової, контролю, система, реєстрації, установки, параметрів, літального, апарата
Формула / Реферат:
Система контролю та реєстрації параметрів силової установки літального апарата, яка містить блок обчислювача, послідовно з’єднані блок нормалізаторів, комутатор, аналого-цифровий перетворювач, перший операційний блок виходами з’єднаний з блоком обчислювача та комутатором, яка відрізняється тим, що в систему додатково введені два блоки формувачів, два перетворювачі частота-код, другий комутатор, два шинних формувачі, два блоки автоматичного...
Система керування, контролю та реєстрації параметрів газотурбінного двигуна
Номер патенту: 76844
Опубліковано: 15.09.2006
Автор: БЕЗСЧАСТНИЙ Василь Олексійович
МПК: F02C 9/28
Мітки: система, керування, реєстрації, параметрів, газотурбінного, двигуна, контролю
Формула / Реферат:
Система керування, контролю та реєстрації параметрів газотурбінного двигуна, яка містить блок сигналізаторів, з'єднаний з блоком змінення рівня переналагодження, блоком формування відмови, блоком запуску, блоком сигналів дозволу, блоком n-входових елементів І, вихід якого через блок зв'язку з виконавчими елементами та блок формувачів установки з'єднаний з блоком сигналів дозволу, вихід блока сигналізаторів через блок контролю з'єднаний з...
Попередній патент: Спосіб оцінки дизадаптації у дітей
Наступний патент: Сирок на печиві глазурований
Випадковий патент: Дитячий спортивний комплекс