Спосіб поколесного зважування рухомих об’єктів
Формула / Реферат
Способ поколесного взвешивания подвижных объектов, включающий установку на железнодорожном пути грузоприемного устройства, опирающегося на тензодатчики, преобразование выходных сигналов тензодатчиков в цифровые коды, фильтрацию цифровых кодов и суммирование результатов обработки, отличающийся тем, что длину платформы грузоприемного устройства с расположенными на ней рельсами устанавливают большей межосевого расстояния регистрируемых объектов, но меньшей межосевого расстояния нерегистрируемых объектов.
Текст
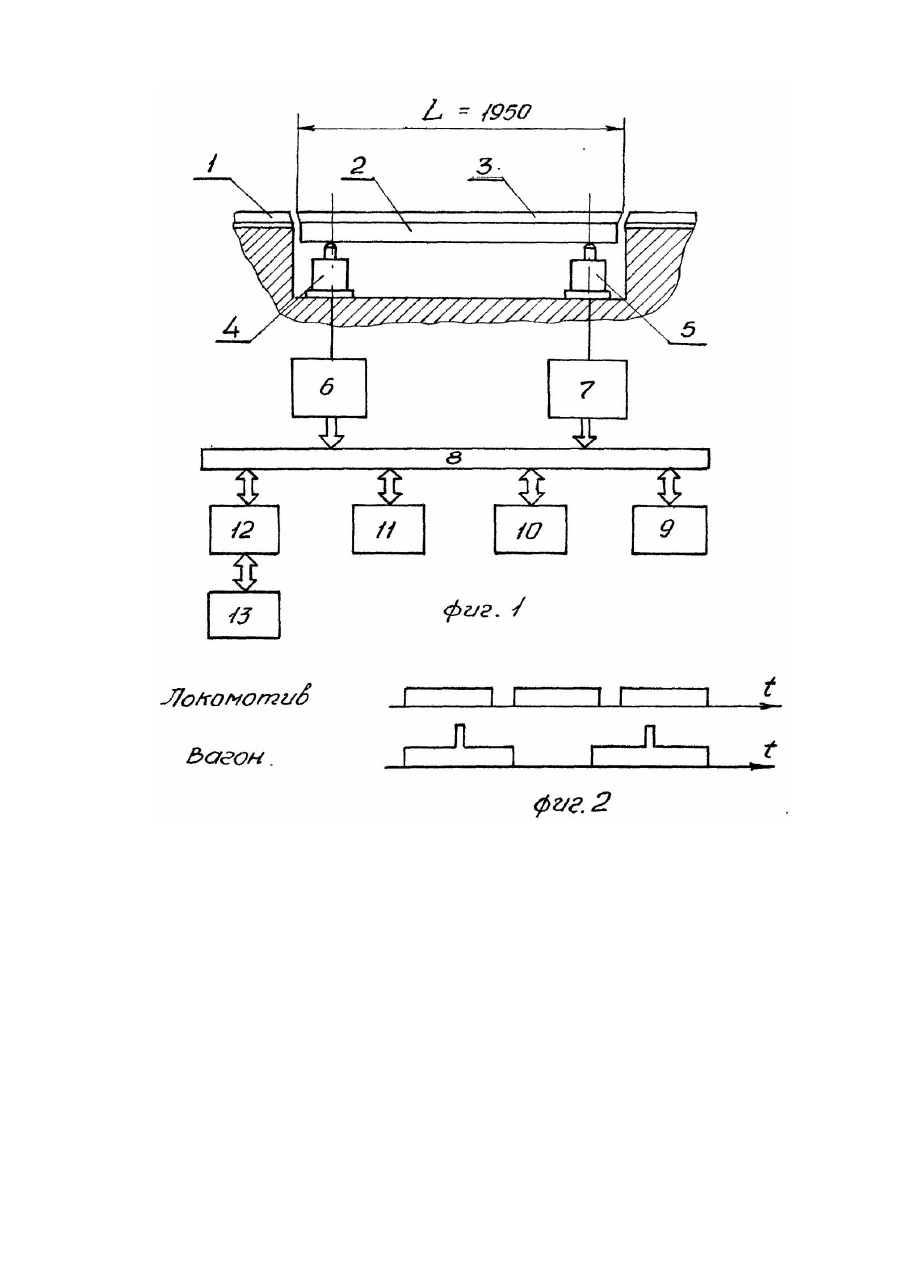
Изобретение относится к весоизмерительной технике и может быть применено для взвешивания грузов, перевозимых с помощью железнодорожного транспорта. Известен способ взвешивания движущихся объектов и устройство для его осуществления, при котором на пути объекта размещают несколько измерительных участков с измерительными датчиками, а путевые датчики размещают перед первым измерительным участком и по их сигналам определяют скорость движения объекта и расстояние между его осями. Затем производят последовательное измерение сигналов силоизмерительных датчиков с частотой, равной отношению скорости движения к длине измерительного участка, формируют периодический сигнал суммированием прямых и инверсных сигналов от силоизмерительных датчиков, которые после цифровой фильтрации используют для вычисления веса [Авт. св. СССР № 1682820 А1, пр. 04.08.86). Недостатком этого способа является использование путевых датчиков в процессе вычисления массы движущи хся объектов, что значительно снижает эксплуатационную надежность. Известен способ поколесного взвешивания подвижных объектов без использования путевых датчиков, включающий установку на железнодорожном пути двух грузоприемных блоков, сдвинуты х относительно друг друга, преобразование выходного сигнала грузоприемных блоков в цифровые коды, фильтрацию цифровых кодов, при котором суммирование результатов обработки для каждой тележки объекта начинают при втором подряд наезде тележки объекта на один и тот же грузоприемный блок, а заканчивают при втором подряд наезде [Авт. св. СССР №1372194, 21.04.86]. Недостатком этого способа является использование для его реализации двух конструктивно сложных весоизмерительных блоков, требующи х для их установки массивных фундаментов, усложняющих и удорожающих реализацию способа, а также снижение точности измерения за счет малого времени измерения массы взвешиваемого подвижного объекта, приходящегося на каждую ось. Целью изобретения является расширение функциональных возможностей, повышение точности взвешивания и эксплуатационной надежности. В основу изобретения поставлена задача создания способа поколесного взвешивания подвижных объектов, позволяющего упростить конструкцию устройства для реализации данного способа, повысить точ1ность, эксппуатационную надежность за счет расширения функциональных возможностей при автоматическом распознавании типа взвешиваемого подвижного объекта. Поставленная задача решается тем, что в соответствие с поколесным способом взвешивания подвижных объектов, включающим установку на железнодорожном пути гр узоприемного устройства, опирающегося на тензодатчики, преобразование выходных сигналов тензодатчиков в цифровые коды, фильтрацию цифровых кодов и суммирование результатов обработки -длину платформы грузоприемного устройства устанавливают большей межосевого расстояния регистрируемых объектов, но меньшей межосевого расстояния нерегистрируемых объектов. Техническим результатом предложенного способа является его реализация более простым конструктивным средством, когда вместо двух или более грузоприемных блоков используют грузоприемное устройство, с установленной на тензодатчиках одной платформой, длину которой устанавливают большей межосевого расстояния регистрируемых объектов, что повышает точность измерения за счет большего времени измерения массы подвижного объекта, приходящейся на каждую ось, а также увеличивает эксплуатационную надежность вследствие расширения функциональных возможностей за счет автоматического распознавания типа вагона без использования путевых датчиков. Новизна способа состоит в том, что длину платформы грузоприемного устройства устанавливают большей межосевого расстояния регистрируемых объектов, но меньшей межосевого расстояния нерегистрируемых объектов, а также увеличивают интервал времени измерения массы движущегося объекта, приходящейся на каждую ось. Сопоставительный анализ заявляемого технического решения с другими, известными из научнотехнической и патентной литературы, позволяет выявить признаки, отличающие заявляемое решение от прототипа, что дает возможность сделать вывод о соответствии заявляемых признаков критерию "существенные отличия", определяющему новизну изобретения. На фиг. 1 показана схема устройства, реализующе го способ; на фиг. 2 - диаграмма нагружений грузоприемного устройства при проезде по нему первой и второй тележки четырехосного объекта. Способ поколесного взвешивания подвижных объектов предусматривает установку на железнодорожном пути 1 грузоприемного устройства, содержащего платформу 2 с установленными на ней рельсами 3, опирающуюся на два левых тензодатчика 4 и два правых тензодатчика 5, попарно подключенных к двум аналого-цифровым преобразователям 6 и 7, выходы которых через шины 8 связаны с постоянным запоминающим устройством (ПЗУ) 9, оперативным запоминающим устройством (ОЗУ) 10, центральным процессором 11 и интерфейсом 12. С шиной 8 через интерфейс 12 связано регистрирующее устройство 13 (например, принтер или ЭВМ верхнего уровня). С шиной 8 через интерфейс 12 связано регистрирующее устройство 13 (например, принтер или ЭВМ верхнего уровня). Длина грузоприемной платформы L = 1950 мм, что обеспечивает различение регистрируемых объектов (вагонов) с межосевым расстоянием 1800-1850 мм и нерегистрируемых объектов (локомотивов) с межосевым расстоянием 2100-2200 мм. Способ осуществляют следующим образом. В исходном состоянии начальные сигналы левых 4 и правых тензодатчиков 5 преобразуются в цифровые коды соответственно с помощью АЦП 6 и АЦП 7. Указанные цифровые коды по программе, записанной в ПЗУ 9, заносятся процессором 11 в ОЗУ 10 и усредняются по одной из известных программ (например, путем подсчета среднего значения из 16 подряд измеренных значений кодов, умноженных на весовые коэффициенты, обеспечивающие интегрирование с весовой функцией). Результаты усреднения нулевых кодов запоминаются в ОЗУ 10 и при необходимости перед очередным взвешиванием обновляются. При изменении сигналов тензодатчиков 4 и 5, нагруженных массой объекта, приходящейся на его оси, запомненные нулевые коды вычитаются из соответствующи х результатов преобразования АЦП 6 и АЦП 7. Сумма этих результатов используется для суммирования и определения массы объектов обработки по каждой оси. А разность этих результатов в момент наезда оси вагона на грузоприемное устройство используется для определения направления движения объекта. После наезда первым колесом состава, например, на левый тензодатчик А гр узоприемного устройства выходной сигнал левого тензодатчика возрастает. Соответственно, на выходах АЦП 6 и АЦП 7 возрастают и цифровые коды. Измерив несколько подряд значений кодов АЦП 6 существенно превосходящих коды АЦП 7 процессор формирует команду "Направление движения - левое". Одновременно с наездом процессор начинает по одному из известных алгоритмов, записанных в ПЗУ 9, обработку суммы кодов АЦП 6 и АЦП 7. Результат обработки алгоритма запоминается в ОЗУ 10 как масса первого левостороннего колеса подвижного объекта. Алгоритм обработки с весовой функцией обеспечивает фильтрацию результатов измерения от динамических помех, связанных с вертикальными колебаниями вагона. В силу того, что длина платформы грузоприемного устройства почти в полтора раза длиннее, чем в прототипе, и время измерения выбирается значительно больше. Это способствует большему подавлению динамических помех, следовательно, и выше точность измерения. На фиг. 2 показана диаграмма на гружений грузоприемного устройства при проезде по ней первой и второй тележки четырехосного объекта. Поскольку длина платформы выбрана равной 1950 мм в случае проезда вагона наблюдается кратковременное увеличение нагрузки на тензодатчики. В случае проезда локомотива такого увеличения нагрузки на тензодатчики не наблюдается в связи с тем, что межосевое расстояние у локомотива больше, чем длина платформы грузоприемного устройства. При наезде второй оси вагона на грузоприемное устройство в силу выбранной длины на грузоприемном устройстве некоторое малое время одновременно находятся две оси вагона. При этом (фиг-. 2) суммарный сигнал двух АЦП вдвое выше, чем обычно. Этот момент анализируется процессором и в случае его присутствия формирует сигнал "Измеряемый объект - вагон" и сигнал разрешения измерения следующей оси вагона, который запоминается в ОЗУ. После съезда первой оси вагона уменьшается сигнал правого тензодатчика 5, а следовательно, и выходной код АЦП 7, что анализируется процессором 11 и при наличии сигнала "Измеряемый объект-вагон" начинается измерение массы второй оси первой тележки вагона. Если при наезде второй оси объекта первая съехала, а сумма выходных кодов АЦП уменьшилась на какое-то время до нуля, такая ситуация анализируется процессором как "Измеряемый объект - локомотив". При этом ранее измеренный сигнал обнуляется и блокируется измерение следующей оси. При проезде второй тележки, т. е. третьей и четвертой осей четырехосного вагона, диаграмма нагрузок полностью повторяется, так как первая и вторая тележки объекта идентичны. После проезда второй тележки объекта ее масса суммируется с запомненной ранее в ОЗУ 10 массой первой тележки, а результат - масса вагонов через интерфейс 12 передается для регистрации на принтер 13. Таким образом, заявляемый способ поколесного взвешивания подвижных объектов позволяет повысить точность взвешивания, эксплуатационную надежность за счет расширения функциональных возможностей при автоматическом распознавании типа взвешиваемого объекта, а также упростить конструкцию для реализации данного способа (избежать необходимость создания металлоемких грузоприемных блоков и массивных фундаментов). Заявляемый способ поколесного взвешивания подвижных объектов использован в рабочем проекте весов для нижнеднепровского трубопрокатного завода им. К. Либкнехта в г. Днепропетровске.
ДивитисяДодаткова інформація
Автори англійськоюKalinin Oleksandr Ivanovych
Автори російськоюКалинин Александр Иванович
МПК / Мітки
МПК: G01G 19/04
Мітки: зважування, об'єктів, поколесного, спосіб, рухомих
Код посилання
<a href="https://ua.patents.su/3-22542-sposib-pokolesnogo-zvazhuvannya-rukhomikh-obehktiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб поколесного зважування рухомих об’єктів</a>
Спосіб зважування рухомих об`єктів
Номер патенту: 17600
Опубліковано: 06.05.1997
Автор: Дашевський Яків Тевелович
МПК: G01G 19/04, G01G 23/00
Мітки: рухомих, об'єктів, зважування, спосіб
Формула / Реферат:
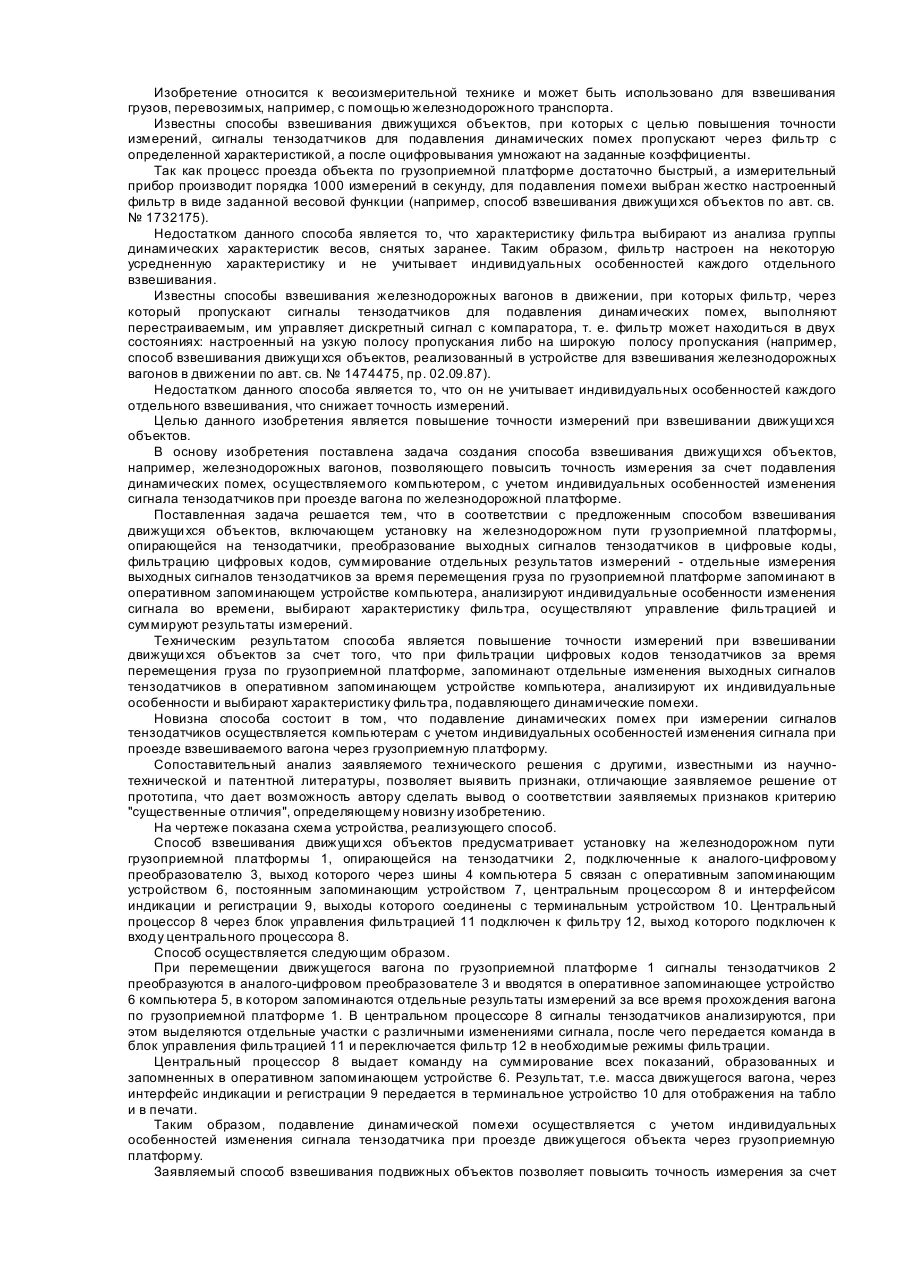
Способ взвешивания движущихся объектов, включающий установку на железнодорожном пути грузоприемной платформы, опирающейся на тензодатчики, преобразование выходных сигналов тензодатчиков в цифровые коды, фильтрацию цифровых кодов, суммирование отдельных результатов измерений, отличающийся тем, что отдельные измерения выходных сигналов тензодатчиков за время перемещения груза по грузоприемной платформе запоминают в оперативном запоминающем...
Пристрій для зважування рухомих залізничних составів
Номер патенту: 13900
Опубліковано: 25.04.1997
Автори: Сільванський Микола Олександрович, Нікітінський Михайло Павлович, Цимбалюк Анатолій Григорович
МПК: G01G 19/04
Мітки: залізничних, рухомих, составів, зважування, пристрій
Формула / Реферат:
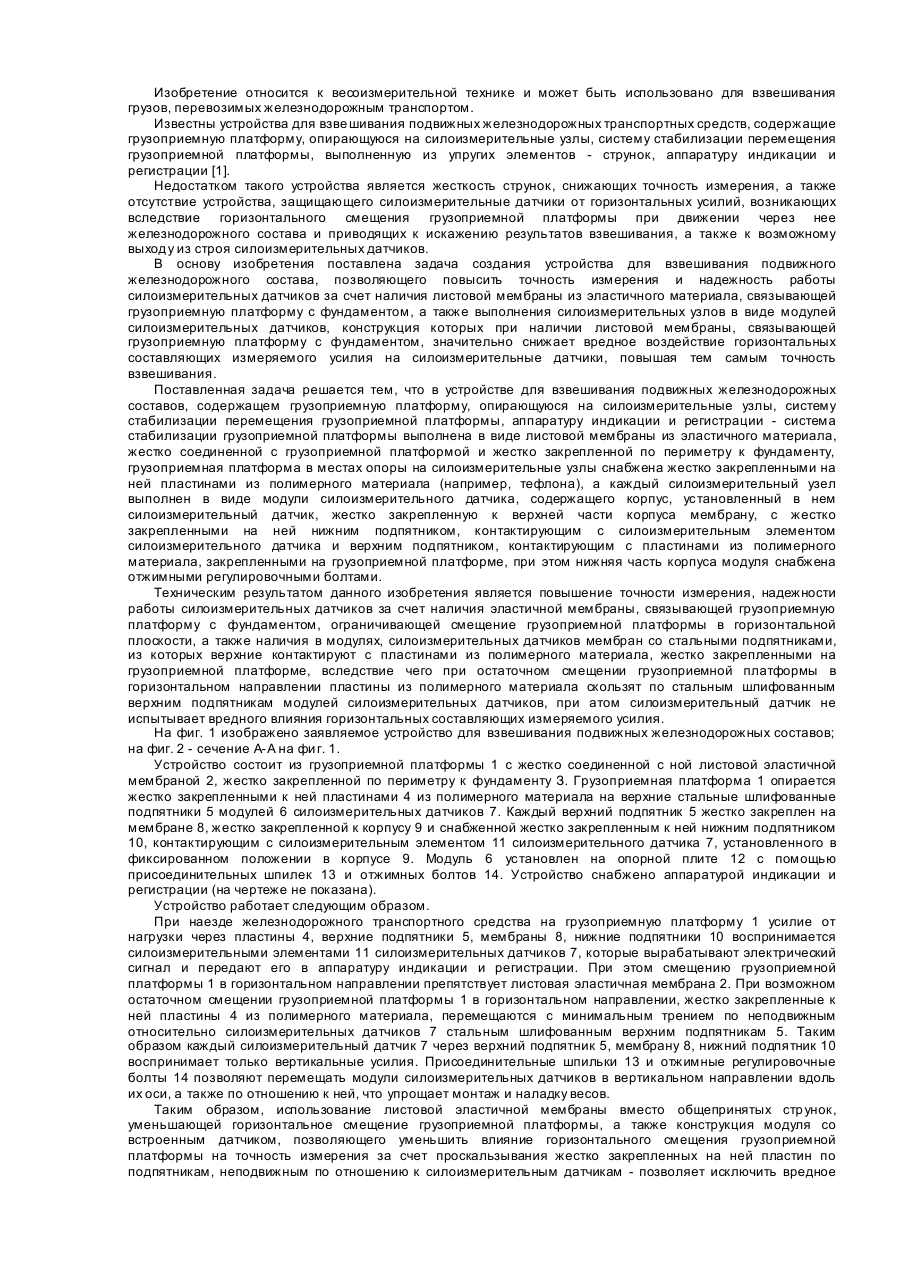
Устройство для взвешивания подвижных железнодорожных составов, содержащее грузоприемную платформу, опирающуюся на силоизмерительные узлы, систему стабилизации перемещения грузоприемной платформы, аппаратуру индикации и регистрации, отличающееся тем, что система стабилизации перемещения грузоприемной платформы выполнена в виде листовой эластичной мембраны, жестко соединенной с грузоприемной платформой и жестко закрепленной по периметру к...
Пристрій для зважування рухомих залізничних составів
Номер патенту: 12608
Опубліковано: 28.02.1997
Автори: Нікітінський Михайло Павлович, Сільванський Микола Олександрович, Цимбалюк Анатолій Григорович
МПК: G01G 19/04
Мітки: составів, залізничних, рухомих, зважування, пристрій
Формула / Реферат:
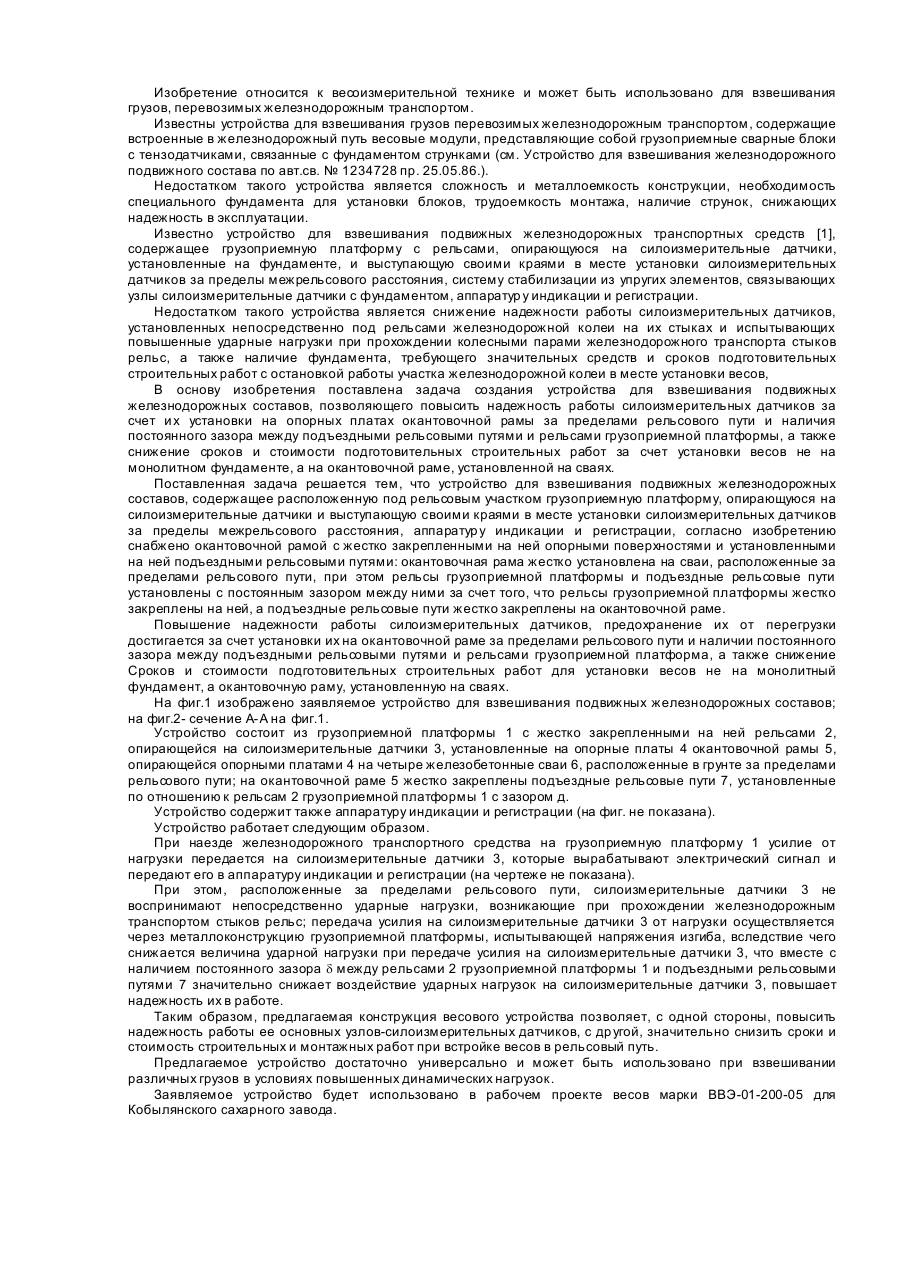
Устройство для взвешивания железнодорожных подвижных составов, содержащее расположенную под рельсовым участком грузоприемную платформу с рельсами, опирающуюся на силоизмерительные датчики и выступающую своими краями в месте установки силоизмерительных датчиков за пределы межрельсового расстояния, аппаратуру индикации и регистрации, отличающееся тем, что оно снабжено окантовочной рамой с жестко закрепленными опорными платами и...
Пристрій для поосьового зважування транспортних засобів
Номер патенту: 21312
Опубліковано: 02.12.1997
Автор: Нікітінський Михайло Павлович
МПК: G01G 19/04
Мітки: транспортних, зважування, поосьового, пристрій, засобів
Формула / Реферат:
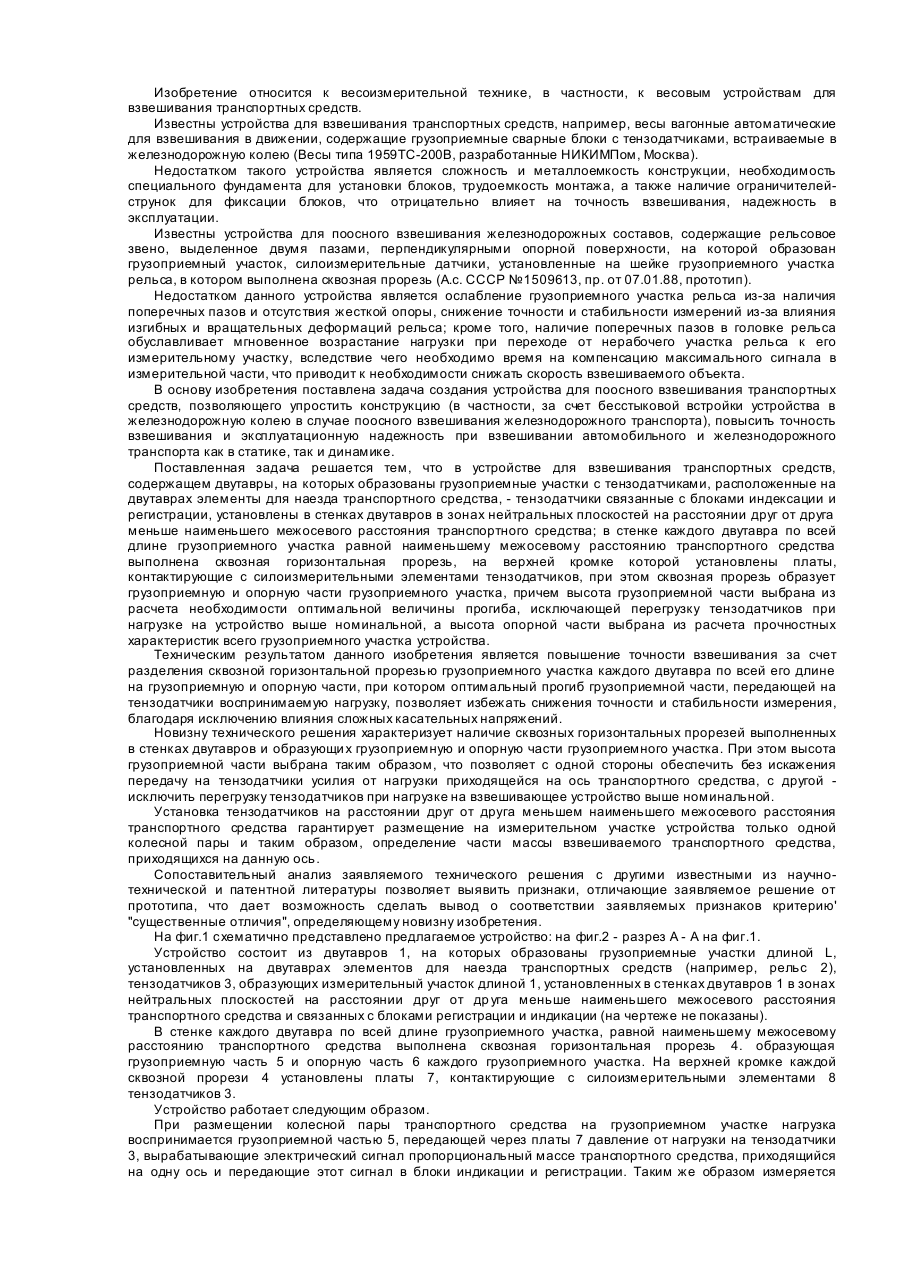
Устройство для поосного взвешивания транспортных средств, содержащее двутавры, на которых образованы грузоприемные участки с тензодатчиками, установленными в стенках двутавров в зонах нейтральных плоскостей и связанными с блоками индикации и регистрации, расположенные на двутаврах элементы для наезда траснпортного средства, отличающееся тем, что тензодатчики, образующие измерительный участок устройства, установлены друг от друга на...
Залізничні ваги для поосного вимірювання маси рухомих вагонів
Номер патенту: 17601
Опубліковано: 06.05.1997
Автор: Дашевський Яків Тевелович
МПК: G01G 19/04
Мітки: вимірювання, поосного, ваги, залізничні, вагонів, рухомих, маси
Формула / Реферат:
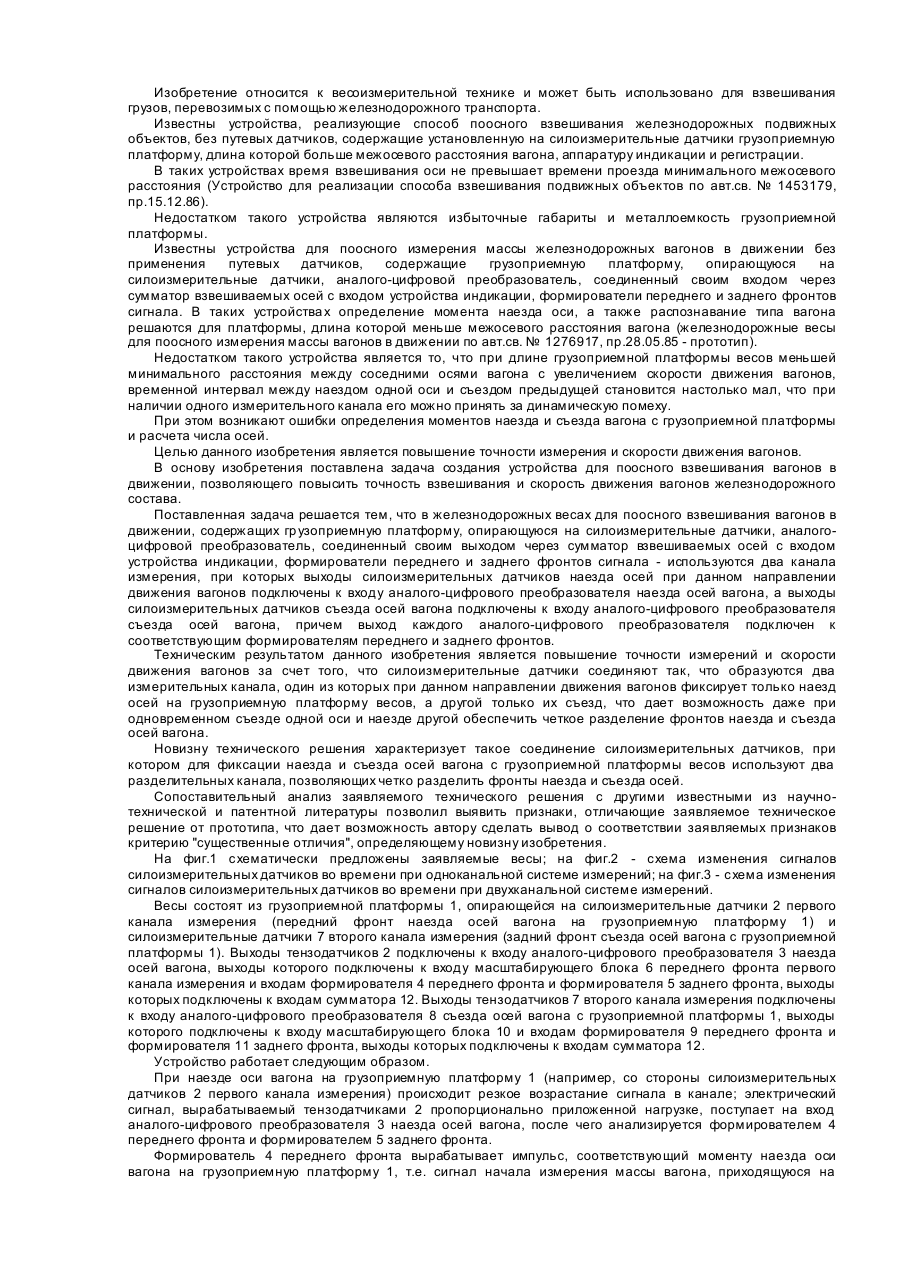
Железнодорожные весы для поосного измерения массы вагонов в движении, содержащие грузоприемную платформу, опирающуюся на силоизмерительные датчики, аналого-цифровой преобразователь, соединенный своим выходом через сумматор взвешиваемых осей с входом устройства индикации, формирователи переднего и заднего фронтов сигнала, отличающиеся тем, что выходы силоизмерительных датчиков наезда осе ι, при данном направлении движения вагонов,...
Попередній патент: Спосіб виготовлення деталей з прутика
Наступний патент: Аератор
Випадковий патент: Повітроохолоджувач холодильної установки