Пристрій для прогнозування надійності металевих конструкцій
Номер патенту: 22579
Опубліковано: 25.04.2007
Автори: Прядченко Дмитро Вікторович, Яковенко Валерій Володимирович
Формула / Реферат
Пристрій для прогнозування надійності металевих конструкцій, що містить електромагніт у формі тороїда, два ферозонди та електричні лінії зв'язку, електродвигун, вісь з встановленим немагнітним шпилястим покажчиком, вал, важіль, дві тарілки з електричними контактами, опори з гумовими прошарками, блок керування та блок обробки сигналу, який відрізняється тим, що як електродвигун застосовані немагнітні механічні деталі, електромагніт у формі тороїда має N корончатих виступів (N![]() 4, парна кількість полюсів), а два ферозонди встановлені на спеціальну немагнітну підставку, як опори з гумовими прокладками застосований ковпак, встановлений на гумовій прокладці, на якому встановлена опорна конструкція з редуктором-варіатором, пристрій також оснащений спіральною пружиною у обмежувально-захисному кожусі, стрілкою з фіксатором, шкалою з пазами, утримувальними кільцями та блоком індикації.
4, парна кількість полюсів), а два ферозонди встановлені на спеціальну немагнітну підставку, як опори з гумовими прокладками застосований ковпак, встановлений на гумовій прокладці, на якому встановлена опорна конструкція з редуктором-варіатором, пристрій також оснащений спіральною пружиною у обмежувально-захисному кожусі, стрілкою з фіксатором, шкалою з пазами, утримувальними кільцями та блоком індикації.
Текст
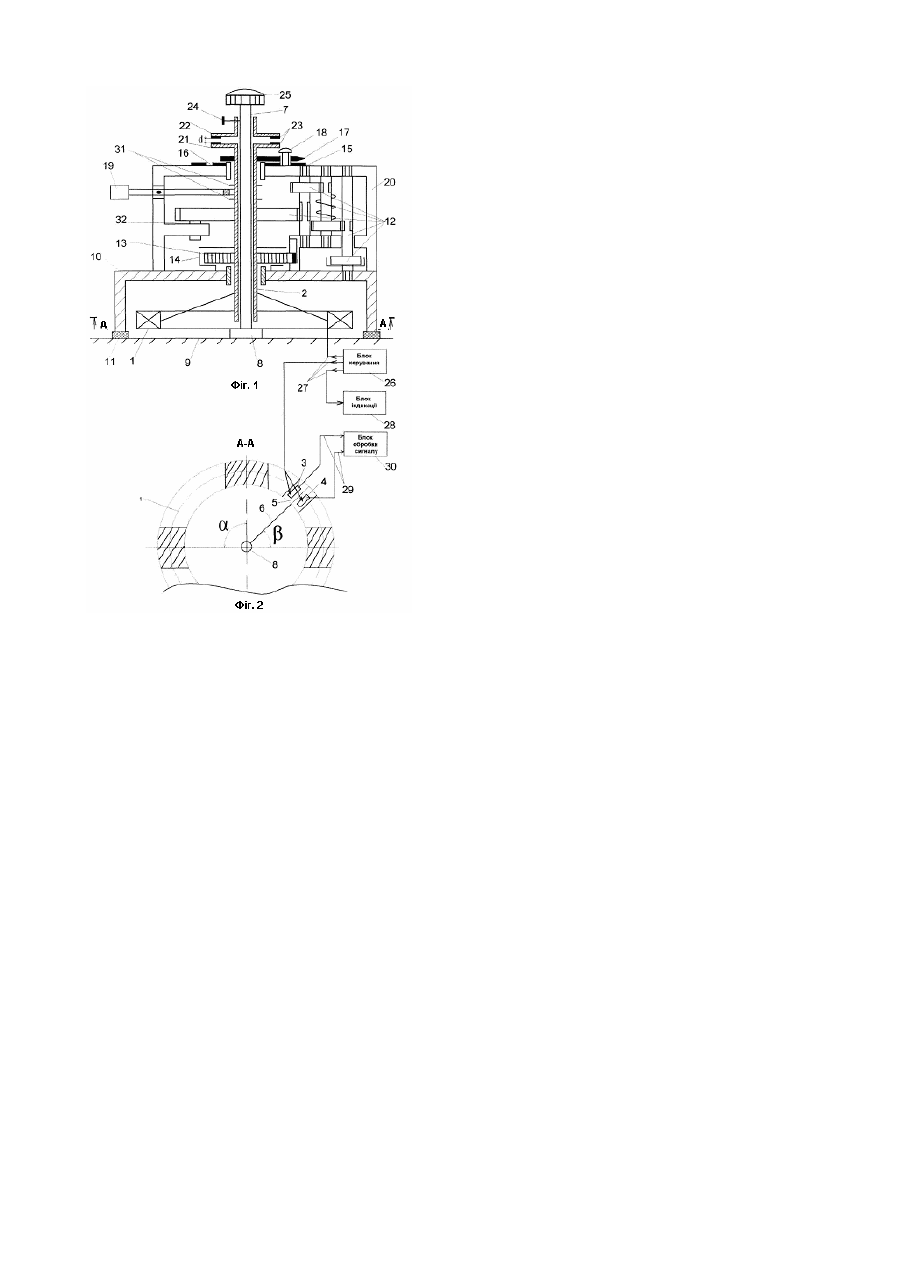
Корисна модель відноситься до електроте хнічної промисловості і може бути використана для прогнозування надійності металевих конструкцій. Удосконалення пристроїв для прогнозування надійності та визначення запасу міцності металеви х констр укцій спричинено необґрунтованим збільшенням розрахункових строків експлуатації значної кількості машин та конструкцій. Найбільш близьким до корисної моделі, що заявляється, є пристрій для п р о гно з ува н ня на дій н о сті ме та ле ви х к о н стр ук ці й , як ий мі сти ть електромагніт у формі тороїда, два ферозонди, елек тродви гун , вісь з немагнітним шпилястим покажчиком на одному кінці та ручкою на іншому, вал, важіль, дві тарілки з електричними контактами, положення однієї з яких регулюється болтовим з'єднанням, опори з гумовими прокладками, блок ке р уван ня , блок о бро бки си гна лу та елек три чні лі ні ї з в'язк у [ди в. Деклараційний па тен т України №53061 А, МП К 7Н 01 F 13 /00 , оп убл. в збірн. №1, 2003р. - обраний за прототип]. Недоліком відомого пристрою є те, що він містить електродвигун, електромагнітне поле якого значною мірою погіршує точність досліджень. В основу корисної моделі поставлено задачу удосконалення пристрою для прогнозування надійності металевих конструкцій шляхом того, що як електродви гун засто совано немагні тні механічні де талі , електромагні т у формі тороїда має N корончатих виступів (N ³4, парна кількість полюсів), а два ферозонди встановлено на спеціальну немагнітну підставк у, пристрій також споряджено редуктором-варіатором, що призведе до того, що пристрій мож е бути вик ор истан ий для п ро гноз ува нн я н адійн о сті м е та ле ви х кон стр ук цій ве лико го розмі р у, та до зна чно го п окра ще ння то чно сті вимірювань. Поставлена задача досягається тим, що у пристрої для прогнозування надійності метале ви х констр укцій, який містить електромагні т у формі тороїда , два ферозонди, електричні лінії зв'язку, електродвигун, вісь з встановленим немагнітним шпилястим покажчиком, опори з гумовими пр окла дками , блок кер ування , блок о бро бки си гна лу, дві тар ілки з електричними контактами, положення однієї з яких регулюється болтовим з 'єдн ан ням , з гі дн о ко ри сн о ї мо делі , як елек тро дви гун з а сто со ва но немагнітні механічні деталі, електромагніт у формі тороїда має N корончатих виступів (N ³4, парна кількість полюсів), а два ферозонди встановлено на спеціальн у нема гні тн у підста вк у, як опо ри з гум овими прокла дками з а с то со вано ко впак , вста но вле ни й на гум о вій пр окладці , н а яком у встано влено опорн у констр укці ю з редук тором-варіа тором що за безпечує постійн у шви дкість обертання р ухомо го вала , спіра льною пр ужиною, стрілкою з фіксатором, шкалою з пазами, утримуючими кільцями та блоком індикації. Блок індикації видає інформацію про те, у якому положенні знаходяться тарілки пристрою, яка операція виконується, та яку операцію необхідно викона ти, це доз во ляє к ра ще застосовува ти ме то дик у вимір ювань та збільшити точність досліджень. Дане технічне рішення пояснюється кресленням, де на Фіг.1 зображено пристрій для прогнозування надійності металевих конструкцій, вид спереду у переризі , на Фіг.2 - розріз А-А на Фі г.1 . Пристрій для про гноз ування надійності металевих конструкцій містить електромагніт 1 у формі тороїда, який має N корончатих виступів, до якого жорстко приєднаний рухомий вал 2, а також ферозонди 3 та 4, які змонтовано на спеціальній немагнітній підставці 5 та за допомогою важеля 6 жорстко з'єднано з рухомим валом 2, та розташовано у просторі таким чином, що дозволяє вимірювати відповідно тангенціальну та нормальну складові магнітного поля. Важіль 6 розташовано відносно електромагніта 1 під кутом ( b = p /N, тобто посередині між двома будь якими сусідніми корончатими виступами (Фіг.2). До нерухомого валу 7 жорстко прикріплено немагнітний покажчик 8, який розташовано у центрі електромагніта 1, перпендикулярно поверхні металевої конструкції 9, що досліджується, за допомогою ковпака 10, який для покращення стійкості встановлено на гумо вій прокладці 11. Між нерухомим валом 7 та ковпаком 10 встановлено рухомий вал 2, який за допомогою редуктора-варіатора 12 та спіральної пружини 13, встановленої у обмежувально-захисному корпусі 14, обертається навколо своєї осі з постійною швидкістю, завдяки конструкції редуктора -варіа тора 1 2, яка забезпечує постійн у швидкість о бер тання р ухомого вала 2. Положення рухомого вала 2 під час обертання регулюється за допомогою шкали 15 з пазами 16, та фіксується за допомогою стрілки 17 і фіксатора 18. Вал 2 може рухатися у вертикальному напрямку відносно н е р ухо м о го ва ла 7 з а доп ом о го ю р учн о го з уси лля та ва ж е ля 1 9 , встановленого на опорній конструкції 20, до моменту дотику нижньої тарілки 21 до верхньої тарілки 22, при цьому замикаються електричні контакти 23 на тарілках 21 та 22. Положення верхньої тарілки 22 регулюється за допомогою болтового з'єднання 24 відносно нерухомого вала 7, на верхній частині якого встановлено ручку 25, воно може змінюватись на висоту d. Блок керування 26 за допомогою електричних ліній зв'язку 27 з'єднано з електромагнітом 1, ферозондами 3 і 4 та блоком індикації 28. Сигнал з ферозондів 3 та 4 за до помо го ю е лек три чни х лі ній з в'язк у 29 надхо ди ть до блок у обр обки сигналу 30, який видає кінцевий результат. Верхнє положення, або з'єднані електричні контакти 23 тарілок 21 та 22 здійснюється за допомогою важеля 19, встановленого на опорній конструкції 20 та утримуючих кілець 31, р оз та шо вани х н а р ухо мом у ва лу 2 . Запоб іжник 3 2 , встан о вле ний на головному зубчатому колесі редуктора - варіатора 12, забезпечує обертання рухомого вала 2 лише на один повний оберт. Робота пристрою для прогнозування надійності металевих конструкцій цілком залежить від того, в якому положенні знаходиться рухомий вал 2, на верхньому кінці якого розташовано нижню тарілку 21, відносно верхньої тарі лки 22. Нижн є положення , або нез'єднанні елек три чні кон так ти 23 тарілок 21 та 22, свідчить про те, що електромагніт 1 та ферозонди 3 і 4 знаходя ться на поверхні метале вої констр укці ї 9, що дослі джується . При цьому н а елек трома гні т 1 за допомо гою елек три чни х ліні й зв'язк у 2 7 подається сигнал з блоку керування 26, і він намагнічує поверхню металевої конструкції 9, що досліджується. Верхнє положення, або з'єднані електричні контакти 23 тарілок 21 та 22, яке здійснюється за допомо гою важеля 19, встан овлено го на опорній констр укції 20, утримуючи х кілець 31 та р ухомого ва ла 2, свідчи ть про те, що електромагніт 1 та ферозонди 3 і 4 знаходяться над поверхнею металевої конструкції 9, що досліджується, на висоті d, яка регулюється болтовим з'єднанням 24 в інтервалі від 1 до 4мм. Причому на цій висоті напруженість одержаного магнітного поля зчитується ферозондами 3 та 4, які вимірюють тан ген ціа льн у та норма льн у ск ла до ві н апр ужен ості м а гні тно го по ля відповідно. З блоку керування 26 за допомогою електричних ліній зв'язку 27 надходить сигнал до ферозондів 3 і 4 та блоку індикації 28, який сповіщає дослідника про виконуван у операцію або необхідність виконання ти х чи інши х дій, відповідно з яким дослідник, докладаючи фізичних зусиль, виймає фіксатор 18 з пазу 16, та починає обертати стрілку 17, жорстко укріплену на рухомому валу 2, навколо своєї осі за годинниковою стрілкою, заводячи пружину 13, встано влен у на валу 2 у обмежувальнозахисному кожусі 14, до ки не обе рне її н а по вне к оло . П одаль шом у о бер танн ю з апо бі гає запобіжник 32 встановлений на головному колесі редуктора-варіатора 12. Закінчивши повний обер т, дослідник відп ускає стрі лку 17, пр ужина 13 починає випростовуватись, вал 2 з жорстко закріпленим електромагнітом 1 та важелем 6 починає обертатись навколо своєї осі з постійною швидкістю, яку забезпечує конструкція редуктора-варіатора 12, і одночасно ферозонди 3 та 4 зчитують напруженість магнітного поля, доки вал 2 разом з важелем 6 не обернеться на по вне коло. Си гнал з ферозон ді в 3 та 4 за допомо го ю електричних ліній зв'язку 29 надходить до блоку обробки сигналу 30 та запам'ятовується. Потім з блок у кер ування 26 за допомогою е лектрични х ліній з в'язк у 27 до блок у індикаці ї 28 надхо ди ть сигна л, з гідно з яким дослідник, використовуючи стрілку 17 та шкалу 15, обертає вал 2 з жорстко укріпленим на ньому електромагнітом 1 та ферозондами 3 і 4 на кут a , який дорівнює a =2 p /N рад, та зафіксовує фіксатор 18 у відповідному пазу 16. Пази 16 для фіксації розташовано на шкалі 15 у відповідності з N електромагніта 1. Електричні контакти 23 тарілок 21 та 22 роз'єдн уються за допомогою важеля 19 і утримуючи х кілець 31, рухомий вал 2 переходить у нижнє положення. На електромагніт 1 за допомогою електричних ліній зв'язку 27 подається сигнал з блоку керування 26, і він намагнічує поверхню металевої конструкції 9, що досліджується, але кожен другий з N корончатих виступів електромагні та 1 має про тилежну полярність. З блок у керування 26 за допомогою електричних ліній зв'язку 27 надходить сигнал до блоку індикації 28, згідно з яким дослідник за допомогою важеля 19 переводить рухомий вал 2 у вер хнє положення, замикаються електричні контакти 23 тарілок 21 та 22. З блоку керування 26 по електричних лініях зв'язку 27 до блоку індикації 28 надходить сигнал, відповідно з яким дослідник виймає фіксатор 18 з пазу 16 і обертає рухомий вал 2 разом з жорстко укріпленими на ньому електромагнітом 1 та ферозондами 3 та 4, за годинниковою стрілкою, на кут a , використовуючи стрілку 17 та шкалу 15, і зафіксовує її фіксатором 18 у відповідному пазу 16. Після чого вал 2 переводиться у нижнє положення, та на елек тромагні т 1 по елек три чни х лінія х з в'язк у 27 з блок у кер ування 26 подається си гна л, і він н амагн ічує по вер хню ме тале во ї констр ук ці ї 9 , що досліджується. Ця процедура продовж ується доти, доки електромагніт 1 не обернеться на повне коло, та поверхня металевої конструкції 9, що до слідж уєть ся , не буде н ама гн і че на N +1 р азі в, п і д час ці єї пр оце дури заводиться пружина 13. Далі, рухомий вал 2 переводиться у верхнє положення, замикаються електри чні контакти 23 тарі лок 21 та 22 . З блок у кер ування 26 по е лектрични х лініях з в'язк у 27 на дхо ди ть си гнал до блок у індикації 28 та ферозондів 3 і 4, згідно з яким дослідник виймає фіксатор 18 з пазу 16. Заведена пружина 13 починає випростовуватись, обертаючи вал 2, до якого жорстко прикріплено електромагніт 1 і важіль 6, з постійною швидкістю. Постійну швидкість обертання забезпечує конструкція редуктора-варіатора 12, конструкція якого аналогічна конструкції механі чно го те ле фонн ого номера набира ча . Одн оча сно ферозо нди 3 та 4 з чи тують нап р ужені сть ма гні тно го п оля , доки важіль 6 не обер не ться на повне коло. Зупинка обертання вала 2 після того, як він зробить повне коло, забезпечується запобіжником 32 на головному колесі редуктора - варіатора 12 та запобіжним виступом на опорній конструкції 20. Сигнал з ферозондів 3 та 4 по електричних лініях зв'язку 29 надходить до блоку обробки сигналу 30, та запам'ятовується. Обидва сигнали після одного намагнічування та після N+1 намагнічувань у блоці обробки сигналу 30 розкладаються по гармоніках, та порівнюються коефіцієнти при відповідних гармоніках. В результаті блок о бр обки сигналу 30 ви да є ін форма цію про те , у яком у стані зна ходи ться м е та ле ва ко нстр ук ці я 9 , що до слі дж уєть ся - не п ри да тн а для по да ль шо ї експлуатації, придатна для подальшої експлуатації (у полегшеному чи нормальному режимі), що дозволить не перевантажувати ненадійні конструкції а також визначати непридатні для подальшої роботи конструкції та уникнути поломок і аварій під час їхньої експлуатації.
ДивитисяДодаткова інформація
Назва патенту англійськоюDevice for reliability prediction of metal constructions
Автори англійськоюYakovenko Valerii Volodymyrovych
Назва патенту російськоюУстройство для прогнозирования надежности металлических конструкций
Автори російськоюЯковенко Валерий Владимирович
МПК / Мітки
МПК: H01F 13/00
Мітки: металевих, надійності, конструкцій, прогнозування, пристрій
Код посилання
<a href="https://ua.patents.su/3-22579-pristrijj-dlya-prognozuvannya-nadijjnosti-metalevikh-konstrukcijj.html" target="_blank" rel="follow" title="База патентів України">Пристрій для прогнозування надійності металевих конструкцій</a>
Пристрій для прогнозування надійності металевих конструкцій
Номер патенту: 53061
Опубліковано: 15.01.2003
Автори: Яковенко Валерій Володимирович, Жученко Наталія Олександрівна
МПК: H01F 13/00
Мітки: надійності, прогнозування, пристрій, металевих, конструкцій
Формула / Реферат:
Пристрій для прогнозування надійності металевих конструкцій, що містить електромагніт у формі тороїду, ферозонди та електричні лінії зв'язку, який відрізняється тим, що електромагніт у формі тороїду має N корончатих виступів (N³ 4, парна кількість полюсів), а два ферозонди встановлено на спеціальну немагнітну підставку, пристрій також оснащено електродвигуном, віссю з закріпленим немагнітним шпилястим покажчиком на одному кінці та...
Система керування пристроєм для прогнозування надійності металевих конструкцій
Номер патенту: 4993
Опубліковано: 15.02.2005
Автори: Мушкаєв Ярослав Володимирович, Жученко Наталія Олександрівна, Полтавцев Андрій Юрійович, Яковенко Валерій Володимирович
МПК: H01F 7/08
Мітки: металевих, прогнозування, надійності, керування, конструкцій, пристроєм, система
Формула / Реферат:
Система керування пристроєм для прогнозування надійності металевих конструкцій, що містить пристрій синхронізації, до якого приєднано двійковий лічильник, виходи якого з'єднано з запам'ятовуючим пристроєм, яка відрізняється тим, що систему керування забезпечено блоком заборони розрахунку, блоком ручного керування, блоком скидання, блоком індикації, схемою комутації електромагніта, схемою комутації ферозонда, схемою комутації крокового...
Пристрій для електрофізичної обробки металевих конструкцій ds10
Номер патенту: 43290
Опубліковано: 15.11.2001
Автори: Дівак Павло Павлович, Свистунов Микола Васильович, Сокирко Володимир Арсентійович
МПК: H01F 13/00
Мітки: обробки, пристрій, електрофізичної, конструкцій, металевих
Формула / Реферат:
Пристрій для електрофізичної обробки металевих конструкцій який містить автоматичний вимикач, тиристорний регулятор величини напруги на первинній обмотці трансформатора, силовий трансформатор, силовий випрямляч, силовий елемент зворотного зв'язку по струму, блок реверсування, а також систему регулювання величиною і напрямком струму, яка містить блок живлення, блок керування тиристорами й оптронною розв'язкою, плату зворотного зв'язку по...
Пристрій для термоабразивного очищення металевих та бетонних конструкцій
Номер патенту: 7194
Опубліковано: 30.06.1995
Автори: Лавришин Богдан Миколайович, Фенчин Святослав Володимирович, Гевський Ярослав Ярославович, Студент Михайло Михайлович, Демид Михайло Петрович, Олійник Тарас Йосипович, Кузик Богдан Іванович
МПК: E21C 37/16, E21B 7/14
Мітки: бетонних, металевих, очищення, термоабразивного, конструкцій, пристрій
Формула / Реферат:
Пристрій для термоабразивного очищення металевих та бетонних конструкцій, який включає камеру згоряння, по осі симетрії якої з одного боку вмонтоване сопло для виходу газів із камери згоряння, а з другого- вузол подачі абразивного матеріалу, а також трубопроводи для подачі окислювача та пального до камери згоряння, що відрізняється тим, що камера згоряння утворена двома конусними оболонками, що з'єднані основами, осі яких розташовані по осі...
Вузлове з’єднання елементів з труб металевих просторових конструкцій
Номер патенту: 44976
Опубліковано: 15.03.2002
Автори: Черних Інна Юріївна, Корольов Володимир Петрович, Гібаленко Олександр Миколаєвич
МПК: E04B 1/58
Мітки: вузлове, з'єднання, металевих, елементів, конструкцій, труб, просторових
Формула / Реферат:
Вузлове з'єднання елементів з труб металевих просторових конструкцій, яке має у своєму складі пусте кульове ядро, що виконане з штампованих напівкульок, зварених між собою автоматичною зваркою, до якого приварені трубчасті стрижні згідно з розташуванням стрижневих елементів у просторовій конструкції, яке відрізняється тим, що вузлове з‘єднання виконано розбірним, для чого воно має спеціальні болти, гайку та фігурну шайбу, всі трубчасті...
Попередній патент: Ливникова система для модифікування чавуну в ливарній формі
Наступний патент: Спосіб утилізації відвальної породи териконів
Випадковий патент: Дерматом з прозорою рельєфною обмежуючою пластиною для зрізування квазітовстого аутодермотрансплантата