Система керування пристроєм для прогнозування надійності металевих конструкцій
Номер патенту: 4993
Опубліковано: 15.02.2005
Автори: Полтавцев Андрій Юрійович, Яковенко Валерій Володимирович, Мушкаєв Ярослав Володимирович, Жученко Наталія Олександрівна
Формула / Реферат
Система керування пристроєм для прогнозування надійності металевих конструкцій, що містить пристрій синхронізації, до якого приєднано двійковий лічильник, виходи якого з'єднано з запам'ятовуючим пристроєм, яка відрізняється тим, що систему керування забезпечено блоком заборони розрахунку, блоком ручного керування, блоком скидання, блоком індикації, схемою комутації електромагніта, схемою комутації ферозонда, схемою комутації крокового двигуна, джерелом живлення, при цьому лічильний вхід двійкового лічильника приєднано до блока синхронізації, адресні входи запам'ятовуючого пристрою приєднано до виходів двійкового лічильника, а перші три виходи запам'ятовуючого пристрою з'єднані зі схемами комутації електромагніта, крокового двигуна та ферозонда відповідно, причому обмотки електромагніта та ферозонда живляться від джерела живлення, блок скидання приєднано до першого, другого, п'ятого та шостого виходів двійкового лічильника і вихід блока скидання приєднано до входу скидання двійкового лічильника, вихід блока ручного керування з'єднано з входом скидання першого тригера блока заборони розрахунку, тактовий вхід першого тригера блока заборони розрахунку з'єднано з четвертим виходом запам'ятовуючого пристрою, вихід першого тригера блока заборони розрахунку з'єднаний з блоком світлової індикації, вихід другого тригера блока заборони розрахунку з'єднано з блоком синхронізації.
Текст
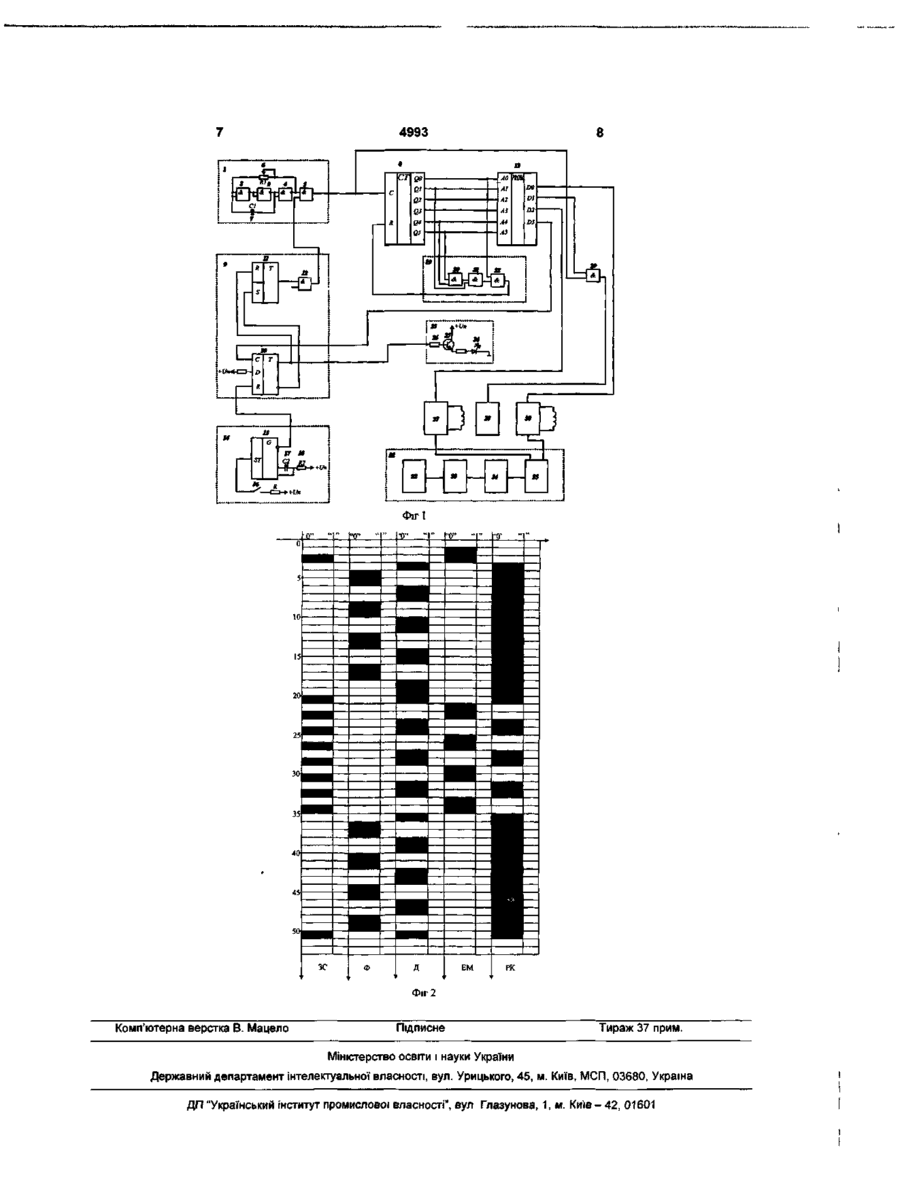
Система керування пристроєм для прогнозування надійності металевих конструкцій, що містить пристрій синхронізації, до якого приєднано двійковий лічильник, виходи якого з'єднано з запам'ятовуючим пристроєм, яка відрізняється тим, що систему керування забезпечено блоком заборони розрахунку, блоком ручного керування, блоком скидання, блоком індикації, схемою комутації електромагніта, схемою комутації ферозонда, схемою комутації крокового двигуна, джерелом живлення, при цьому лічильний вхід двійкового лічильника приєднано до блока синхронізації, адресні входи запам'ятовуючого пристрою приєднано до виходів двійкового лічильника, а перші три виходи запам'ятовуючого пристрою з'єднані зі схемами комутації електромагніта, крокового двигуна та ферозонда відповідно, причому обмотки електромагніта та ферозонда живляться від джерела живлення, блок скидання приєднано до першого, другого, п'ятого та шостого виходів двійкового лічильника і вихід блока скидання приєднано до входу скидання двійкового лічильника, вихід блока ручного керування з'єднано з входом скидання першого тригера блока заборони розрахунку, тактовий вхід першого тригера блока заборони розрахунку з'єднано з четвертим виходом запам'ятовуючого пристрою, вихід першого тригера блока заборони розрахунку з'єднаний з блоком світлової індикації, вихід другого тригера блока заборони розрахунку з'єднано з блоком синхронізації. со о О) Корисна модель відноситься до електротехніки, а саме - до систем керування електромагнітами та магніточутливими елементами. Удосконалення систем керування пристроями з електромагнітами та магніточутливими елементами викликано необхідністю перевірки якості намагнічування та розмагнічування поверхні, що контролюється, тобто необхідністю підвищення інформативності цього процесу. Найбільш близьким до корисної моделі, що заявляється, є пристрій керування кріпильним пристосуванням з постійними магнітами, що містить пристрій синхронізації, до якого приєднано двійковий лічильник, виходи якого з'єднано з запам'ятовуючим пристроєм (див. а.с. СРСР №1700611А1, M I . H 0 1 F 1 3 / 0 0 , 1991р. бюл. №47) обраний за прототип. Недоліком відомого пристрою є те, що він керує електромагнітом, але отриманий результат не перевіряється на якість намагнічування (розмагнічування) будь-якими магніточутливими елементами. В основу корисної моделі поставлено задачу удосконалення системи керування пристроєм для прогнозування надійності металевих конструкцій шляхом того, що систему керування забезпечено блоком заборони рахування, блоком ручного керування, блоком скидання, блоком індикації, схемою комутації електромагніта, схемою комутації ферозонда, схемою комутації крокового двигуна, дже 4993 релом живлення, і це призводить до того, що система може бути використана для керування пристроєм, який містить електромагніт та магніточутливі елементи. Поставлена задача досягається тим, що система керування пристроєм для прогнозування надійності металевих конструкцій, що містить пристрій синхронізації, до якого приєднано двійковий лічильник, виходи якого з'єднано з запам'ятовуючим пристроєм, згідно корисної моделі, забезпечена блоком заборони рахування, блоком ручного керування, блоком скидання, блоком індикації, схемою комутації електромагніта, схемою комутації ферозонда, схемою комутації крокового двигуна, джерелом живлення, при цьому лічильний вхід двійкового лічильника приєднано до блоку синхронізації, адресні входи запам'ятовуючого пристрою приєднано до виходів двійкового лічильника, а перші три виходи запам'ятовуючого пристрою з'єднані зі схемами комутації електромагніта, крокового двигуна та ферозонда відповідно, причому обмотки електромагніта та ферозонда живляться від джерела живлення, блок скидання приєднано до першого, другого, п'ятого та шостого виходів двійкового лічильника і вихід блоку скидання приєднано до входу скидання двійкового лічильника, вихід блоку ручного керування з'єднано з входом скидання першого тригера блоку заборони розрахунку, тактовий вхід першого тригера блоку заборони розрахунку з'єднано з четвертим виходом запам'ятовуючого пристрою, вихід першого тригера блоку заборони розрахунку з'єднаний з блоком світлової індикації, вихід другого тригера блоку заборони розрахунку з'єднано з блоком синхронізації. Дане технічне рішення пояснюється кресленням, де на Фіг.1 зображено функціональну схему системи керування пристроєм для прогнозування надійності металевих конструкцій, наФіг.2 - часові діаграми, що пояснюють роботу схеми. Запропонована система керування пристроєм для прогнозування надійності металевих конструкцій містить блок синхронізації 1, який виконано на елементах І 2, І З, І 4, І 5, змінному резисторі 6 і ємності 7; двійковий лічильник 8; блок заборони рахунку 9, який містить два тригери 10 і 11, та елемент І 12; запам'ятовуючий пристрій 13 у якому прошита програма роботи; блок ручного керування 14, який містить одновібратор 15, двопозиційний перемикач 16, ємність 17 й резистор 18; систему також забезпечено блоком скидання 19, який виконано на елементах І 20, І 21, І 22; блоком індикації 23, який містить світлодіод 24, що керується транзистором 25, та резистор 26, що є необхідним для обмеження струму бази транзистора 25; в системі також застосовано схему комутації електромагнітом 27; схему комутації крокового двигуна 28, де за допомогою елемента І 29 у схему керування двигуном 28 подаються керуючі імпульси; схему комутації ферозонда ЗО, джерело живлення 31, яке містить послідовно включені трансформатор 32, приєднаний до джерела змінної напруги 33, однополуперіодний випрямляч 34, підсилювачобмежник 35. Джерелом змінної напруги 33 може бути мережа електроживлення. Робота запропонованої системи полягає у наступному: для здійснення процесів намагнічування й проведення вимірів на другий вхід елемента І 12, що входить до блоку заборони рахунку 9, подається рівень логічної одиниці, у результаті чого знімається блокування тактових імпульсів з блоку синхронізації 1 і починається перший цикл вимірів. Відразу після підрахунку першого імпульсу лічильником 8 на першому виході запам'ятовуючого пристрою 13 з'являється імпульс, який надходить до схеми комутації електромагнітом 27, що комутує обмотку електромагніту із джерелом живлення 31, яке містить послідовно включені трансформатор 32, приєднаний до джерела змінної напруги 33, однополуперіодний випрямляч 34, підсилювачобмежник 35, що є необхідними для одержання цифрового імпульсу достатньої потужності для намагнічування контрольованої поверхні, потужність якого достатня для намагнічування контрольованої поверхні. При проходженні другого тактового імпульсу на двійковий лічильник 8 на четвертому виході запам'ятовуючого пристрою 13 з'являється сигнал, що інформує про необхідність зміни стану. Даний керуючий сигнал надходить до блоку заборони рахунку 9. На виході блоку заборони рахунку 9 формується сигнал з рівнем логічного нуля, що надходить на вхід блоку синхронізації 1 - вихід елемента І 12, у результаті чого блокується проходження чергових тактових імпульсів на двійковий лічильник 8. Блок синхронізації 1 являє собою генератор, реалізований на елементах І 2, І З, І 4, І 5, тривалість тактових імпульсів якого визначається елементами 6 та 7 ( т і «VR1C1). При цьому система переходить у стан очікування. Одночасно із сигналом заборони на виході блоку заборони 9, на прямому виході тригера 10 з'являється рівень логічної одиниці, що переводить світлодіод 24 блоку індикації 23 у активний стан, тобто інформує оператора про необхідність підняття електромагніту з контрольованої поверхні. Після виконання вищевказаної дії з появою сигналу про зміну стану, оператор натискає двопозиційний перемикач 16 блоку ручного керування 14. Сформований при натисканні двопозиційного перемикача 16 сигнал, надходить на одновібратор 15, на виході якого з'являється прямокутний імпульс, тривалість якого забезпечують елементи 17 та 18 (ті > х2, х2« VR2C2 ). Одновібратор 15 забезпечує відсутність вторинних сигналів, викликаних неідеальним контактом двопозиційного перемикача 16. Сигнал з виходу блоку ручного керування 14 надходить на вхід блоку заборони рахунку 9. Відбувається скидання тригера 10. Вихід тригера 10 приєднаний до резистора 26, що обмежує струм бази транзистора 25. При цьому рівень логічного нуля на прямому виході тригера 10 переводить у пасивний стан блок індикації 23 та, одночасно, надходить на вхід скидання тригера 11. Рівень логічної одиниці з інверсного виходу тригера 10, надходячи на вхід тригера 11, приводить до появи на виході тригера 11 логічної одиниці. У результаті цього знімається блокування із двійкового лічильника 8, і триває подальший рахунок імпульсів, що надходять з блоку синхро 4993 нізації 1. У ході роботи системи сигнали з виходу запам'ятовуючого пристрою 13 (D2 і DO відповідно) надходять до схем комутації 27 та ЗО електромагніта та ферозонда відповідно (гальванічна розв'язка в блок - схемі не показана тому що передбачається, що вона входить до складу відповідних пристроїв). Схема комутації кроковимдвигуном 28 реалізована таким чином, кожний імпульс з виходу елемента І 29 призводить до повороту електромагніта на кут 45° (значення кута повороту залежить лише від кількості корончатих виступів електромагніта). Подальша робота системи керування пристроєм для прогнозування надійності металевих конструкцій відбувається відповідно до часових діаграм (див. Фіг.2). Циклічність роботи системи забезпечується блоком скидання 19, який реалізовано на елементах І 20, І 21, І 22, входи яких приєднані до виходів двійкового лічильника 8 таким чином, що з появою адреси останнього стану (51 адреса) на виході блоку скидання 19 з'являється логічна одиниця, яка занулює двійковий лічильник 8. При цьому система переходить у початковий стан і починається черговий цикл його роботи. Робота системи зупиняється подачею рівня логічного нуля на другий вхід елемента І 12 блоку заборони рахунка 9. У результаті цього блокується проходження чергових тактових імпульсів на двійковий лічильник 8. Система переходить у стан очікування й після цього може бути остаточно зупинена. Для пояснення роботи схеми керування пристроєм для прогнозування надійності металевих конструкцій звернемося до часових діаграм (Фіг.2). На часовій діаграмі використані наступні скорочення: РК - ручне керування; ЕМ - електромагніт; Д - двигун; Ф - ферозонд або інший магніточутливий елемент; ЗС - зміна стану. При установці пристрою для прогнозування надійності металевих конструкцій на поверхню, що контролюється, перше, що необхідно зробити, - це намагнітити дану поверхню (ділянка 1-ЗЕМ на часовій діаграмі). Внаслідок того, що ферозонд не може розташовуватися під корончатими виступами електромагніта, необхідно за допомогою двигуна (ділянка 3-4Д) повернути підставку з ферозондом так, щоб він перебував на місці корончатого виступу електромагніта. При цьому кут повороту двигуна залежить від кількості корончатих виступів . . . 1 360° електромагніта і чисельно дорівнює а = , 2 N де N - число корончатих виступів електромагніта. Часові діаграми наведені для випадку, коли N = 4 . Ферозонд зчитує магнітну інформацію в центрі магнітної мітки (ділянка 4-6Ф). За допомогою двигуна необхідно повернути підставку з ферозондом так, щоб вона перебувала над піком наступної магнітної мітки (ділянки 6-8, 10-12, 14-16Д), кількість яких визначається числом корончатих виступів електромагніта N. При цьому, щоразу перебуваючи в центрі магнітної мітки, ферозонд зчитує магнітну інформацію (ділянки 8-Ю, 12-14, 16-18Ф). Інформація, отримана ферозондом, запам'ятовується як дані для порівняння після декількох циклів перемагнічування. За допомогою двигуна (ділянка 18-21Д) повертаємо електромагніт так, щоб корончаті виступи електромагніта збігалися із проставленими раніше магнітними мітками, але при цьому, щоб полярності корончатих виступів електромагніта були протилежними, тобто якщо раніше дана ділянка контрольованої поверхні намагнічувалась південним полюсом, де тепер її буде намагнічувати північний полюс електромагніта. Електромагніт перемагнічує поверхню (ділянка 2123ЕМ). Далі за допомогою двигуна (ділянки 23-25, 27-29, 31-ЗЗД) повертаємо електромагніт так, щоб він мав можливість перемагнічувати контрольовану поверхню (ділянки 25-27, 29-31, 33-35ЕМ) доти, поки він не зробить повне коло, тобто N перемагнічувань. Нову інформацію необхідно зафіксувати за допомогою ферозонда (ділянки 36-38, 40-42, 44-46, 48-50Ф) аналогічно, як це були зроблені на ділянках 8-10, 12-14, 16-18Ф, обертаючи підставку з ферозондом за допомогою двигуна (ділянки 3536, 38-40, 42-44, 46-48, 50-51Д). Для того, щоб за допомогою двигуна повернути електромагніт і підставку з ферозондом, необхідно, щоб електромагніт не торкався поверхні, тим самим не перешкоджав обертанню. Для цього необхідно натиснути двопозиціинии перемикач 16 блоку ручного керування 14, за допомогою якого електромагніт підводиться над поверхнею, не порушуючи роботи двигуна. Іншими словами, ручне керування повинно бути обов'язково увімкнено при роботі двигуна і обов'язково вимкнено при роботі електромагніта (ділянки 3-21, 23-25, 27-29, 31-33, 35-51 РК). Допоміжним елементом при ручному керуванні є світлодіод 24, який сигналізує про зміну становища ручного керування (ділянки 2-3, 2021, 21-22, 24-25, 26-27, 28-29, 30-31, 32-33, 34-35, 50-51 ЗС). Іншими словами, про необхідність увімкнути (ділянки 2-3, 22-23, 26-27, 30-31, 34-353С) або вимкнути (ділянки 20-21, 24-25, 28-29, 32-33, 50-51 ЗС) двопозиціинии перемикач 16 блоку ручного керування 14 сигналізує світлодіод 24 зміни становища. 4993 і пи**І І '—СЗ-»+ІЛІ j ФіГІ Фіг 2 Комп'ютерна верстка В. Мацело Підписне Тираж 37 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут промислової власності", вул Глазунова, 1, м. К и ї в - 4 2 , 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюControl system of a device for checking reliability of metal structures
Автори англійськоюZhuchenko Nataliia Oleksandrivna, Yakovenko Valerii Volodymyrovych, Mushkaiev Yaroslav Volodymyrovych
Назва патенту російськоюСистема управления устройством для контроля надежности металлических конструкций
Автори російськоюЖученко Наталья Александровна, Яковенко Валерий Владимирович, Мушкаев Ярослав Владимирович
МПК / Мітки
МПК: H01F 7/08
Мітки: надійності, металевих, пристроєм, керування, система, прогнозування, конструкцій
Код посилання
<a href="https://ua.patents.su/4-4993-sistema-keruvannya-pristroehm-dlya-prognozuvannya-nadijjnosti-metalevikh-konstrukcijj.html" target="_blank" rel="follow" title="База патентів України">Система керування пристроєм для прогнозування надійності металевих конструкцій</a>
Пристрій для прогнозування надійності металевих конструкцій
Номер патенту: 53061
Опубліковано: 15.01.2003
Автори: Яковенко Валерій Володимирович, Жученко Наталія Олександрівна
МПК: H01F 13/00
Мітки: конструкцій, прогнозування, пристрій, надійності, металевих
Формула / Реферат:
Пристрій для прогнозування надійності металевих конструкцій, що містить електромагніт у формі тороїду, ферозонди та електричні лінії зв'язку, який відрізняється тим, що електромагніт у формі тороїду має N корончатих виступів (N³ 4, парна кількість полюсів), а два ферозонди встановлено на спеціальну немагнітну підставку, пристрій також оснащено електродвигуном, віссю з закріпленим немагнітним шпилястим покажчиком на одному кінці та...
Пристрій для електрофізичної обробки металевих конструкцій ds10
Номер патенту: 43290
Опубліковано: 15.11.2001
Автори: Дівак Павло Павлович, Свистунов Микола Васильович, Сокирко Володимир Арсентійович
МПК: H01F 13/00
Мітки: обробки, металевих, конструкцій, електрофізичної, пристрій
Формула / Реферат:
Пристрій для електрофізичної обробки металевих конструкцій який містить автоматичний вимикач, тиристорний регулятор величини напруги на первинній обмотці трансформатора, силовий трансформатор, силовий випрямляч, силовий елемент зворотного зв'язку по струму, блок реверсування, а також систему регулювання величиною і напрямком струму, яка містить блок живлення, блок керування тиристорами й оптронною розв'язкою, плату зворотного зв'язку по...
Антикорозійна бітумно-полімерна система для захисту металевих конструкцій та трубопроводів
Номер патенту: 2731
Опубліковано: 15.07.2004
Автори: Шандра Володимир Миколайович, Гаврилюк Василь Васильович, Чернявка Микола Сергійович
Мітки: антикорозійна, конструкцій, металевих, бітумно-полімерна, трубопроводів, система, захисту
Формула / Реферат:
1. Антикорозійна бітумно-полімерна система для захисту металевих конструкцій та трубопроводів, яка містить паралельні шари: шар ґрунтовки, призначеної для нанесення на металеву конструкцію, яку захищають, шар мастики і захисний шар, яка відрізняється тим, що шар мастики виконаний бітумно-полімерним самоклеючим і виготовлений як одне ціле з захисним шаром.2. Антикорозійна бітумно-полімерна система за п. 1, яка відрізняється тим, що шар...
Система керування двигуновою установкою літального апарата
Номер патенту: 61817
Опубліковано: 17.11.2003
Автори: Цехмейстер Олена Олексіївна, Бандура Іван Миколайович, Кулік Анатолій Степанович, Лазоркін Юрій Юрійович, Дигало Оксана Миколаївна
МПК: B64D 31/00
Мітки: система, установкою, літального, двигуновою, апарата, керування
Формула / Реферат:
Система керування двигуновою установкою літального апарата, що містить датчик частоти обертання ротора двигуна, електричний привід паливного агрегату, з'єднаний з паливним агрегатом, яка відрізняється тим, що в неї введені датчик тиску повітря за компресором, послідовно з'єднаний з блоком регулювань точності датчика тиску, датчик температури повітря за вентилятором, послідовно з'єднаний із блоком регулювань точності датчика температури, блок...
Система для обміну даними між об’єктом керування та системою обробки даних
Номер патенту: 61852
Опубліковано: 17.11.2003
Автори: Шаповал Володимир Іванович, Угровецький Олег Петрович, Бандурка Олександр Маркович, Попов Олександр Анатолійович, Симов'ян Саркіс Ваграмович
МПК: G08B 25/00, H04M 11/04
Мітки: системою, даних, обробки, об'єктом, система, даними, керування, обміну
Формула / Реферат:
1. Система для обміну даними між об'єктом керування і системою обробки даних, що містить приймач вхідних сигналів, вхід якого сполучений з виходом об'єкта керування, а вихід - з центральним блоком керування, вихід якого сполучений по лінії зв'язку з передавачем, яка відрізняється тим, що центральний блок керування має другий вихід, підключений через приймач-передавач до другої лінії зв'язку, яка має середовище для передавання, інше ніж...
Попередній патент: Спосіб автоматичного електродугового зварювання обсадних труб
Наступний патент: Спосіб виробництва шампанського
Випадковий патент: Пристрій гусарова для перенесення пляшок